理论力学总结
xxx班 xxx 学号:xxxxxxxx
20##学年理论力学课程总结
说到课程总结,不得不先谈一下理论力学这一学科。理论力学属于一般力学的范畴,而之后我们要接触到的材料力学和结构力学均属于固体力学,而力学的另一个分类流体力学主要研究液体和气体。
本学期所学的理论力学主要分为静力学、运动学与动力学三个方面。故名思议静力学主要研究平衡物体;运动学主要从集合的角度研究物体的运动速度加速度等;而动力学主要研究物体的运动与作用力之间的关系。
而所有的内容都可以归为一个公式 。
。
任何事物的研究都应该是由简到繁,再由繁中去寻找简与繁之间的桥梁。理论力学的研究也是如此。就好像要练就一本武林秘籍一样,首先要打好基础,才能一步步的开始研究学习。
简,即为静止事物的研究,也就是说牛顿第二定律中 =0。此时研究起来就会免去很多由于运动而带来的不便。也就是课本前三章讲的内容。
=0。此时研究起来就会免去很多由于运动而带来的不便。也就是课本前三章讲的内容。
繁,即为运动物体的研究,即 。而如果要研究运动物体的受力情况,就必须要先弄明白物体的运动情况,即其速度与加速度的分析,也就是4-6章的内容。
。而如果要研究运动物体的受力情况,就必须要先弄明白物体的运动情况,即其速度与加速度的分析,也就是4-6章的内容。
要分析运动物体的受力情况,就要寻找简与繁之间的桥梁,这也就出现了第7章的虚位移原理,与第八章的达朗贝尔原理。在我个人的理解,虚位移原理,即为将运动加入到了静止的结构中,通过计算虚功,另起为0,得到结构中的约束力等,这里主要会用到第4-6章中的速度分析来将其解出。也就是说解决这里问题的前提是学号了速度的分析。而说道达朗贝尔原理,即将静力学的内容加入到运动物体的分析之中,从来认为的引入了惯性力和惯性力偶的概念,而分析惯性力和惯性力偶的前提是第4-6章中的加速度分析。这也是我学期结束后,我认为运动学这部分重要的原因。
而后面的动力学三大定理以及拉格朗日方程则是在解决某些动力学问题的简单方法。在动力学普遍定理这一章有刚体平面运动微分方程,仔细看的话不难发现,其实就是达朗贝尔的变形,抑或说达朗贝尔原理是刚体平面运动微分方程的变形。
拉格朗日方程对于广义坐标为两个以上的问题,解决起来比较方便。对于系统中只有有势力的有两个以上广义坐标的系统解决起来其方便性可以更好的看出。
以下是我的总结的具体内容:
首先是各大部分的联系的大致框架
(由于本页不能放开,故请于下页寻找)


运动学中速度分析 加入惯性力后,
结构为平衡力系

运动学中的
加速度分析

一、静力学主要知识:
静力学这一片,了解了力、力矩、力偶等概念后,应该注意的就是:
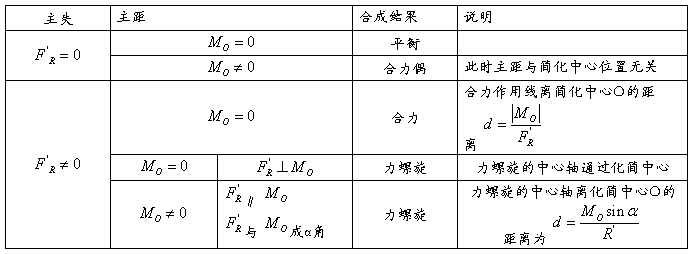
1.力系的简化 空间任意力系简化的最终结果
在了解了各种约束的特点后,便应该是计算约束力等问题,此时要用到
2.力系平衡方程
①平面力系需列三个方程


②空间力系平衡方程有六个







3.桁架分析
此处桁架已经被理想化。其分析方法分为节点法和截面法。在用截面法的时候要注意,每次最多只能截断三根内力未知的杆件。
4.考虑摩擦的平衡问题
分析考虑摩擦的平衡问题问题时,分析的基本步骤与没有摩擦的问题的分析办法相似,只是需要加入补充方程
①静摩擦时

②动摩擦时

实际问题分析时只需要分析平衡的临界状态,,这时候静摩擦力等于其最大值,补充方程只取等号。有时候为了计算方便,也先在临界状态下计算,求得结果后再分析、讨论其解的平衡范围。
在实际问题中存在着自锁现象,这很自然的引出的摩擦角的概念。全约束反力(法向反力与切向反力的矢量和)与法线间的夹角的最大值为摩擦角 ,
,
其中
如果作用在物块的全部主动力的合力 的作用线在摩擦角之内,则无论这个理怎么打,物块必保持静止。这种现象成为自锁。
的作用线在摩擦角之内,则无论这个理怎么打,物块必保持静止。这种现象成为自锁。
斜面的自锁条件是斜面的倾角小于或等于摩擦角。而斜面的自锁条件就是螺纹的自锁条件,螺纹的升角 就是斜面的倾角。
就是斜面的倾角。
5.滚动摩阻
滚动摩阻力偶矩M的大小介于0与最大值之间,即

其中 为滚动摩阻系数,具有长度的量纲,一般用mm。由于滚动摩阻系数较小,因此在大多数情况下滚动摩阻是可以忽略不记的。
为滚动摩阻系数,具有长度的量纲,一般用mm。由于滚动摩阻系数较小,因此在大多数情况下滚动摩阻是可以忽略不记的。
二、运动学知识
运动学主要分为点的运动及其合成运动和刚体的简单运动和平面运动,而此部分又可分为速度分析和加速度分析。因为我认为速度分析和加速度分析分别对后面的虚位移原理和达朗贝尔原理有直接联系,故此处我将从速度和加速度两大部分进行分析。
速度分析
点的速度
对于点的速度分析,主要需要合适的寻找动点、动参考系和定参考系。这样就会多出绝对运动速度 、相对运动速度
、相对运动速度 和牵连运动速度
和牵连运动速度 。其中相对速度为动点相对于动系的运动速度,牵连速度为任一瞬时动系上与动点M重合的点
。其中相对速度为动点相对于动系的运动速度,牵连速度为任一瞬时动系上与动点M重合的点 的速度。其三者的关系为:
的速度。其三者的关系为:

做定轴转动的情况下

在求出速度后很多情况下回需要去求角速度,此时用对应速度除以其对应的转动半径即可。
刚体上个点的速度分析
刚体上各点的速度分析主要有:
1. 基点法
2. 速度投影定理
3. 瞬心法
基点法
选择刚体上一点A的速度已知,现在分析任意点M的速度,则有

其中 为动点相对于基点A的速度。
为动点相对于基点A的速度。
速度投影定理
同一刚体上任意两点的速度在该两点连线上的投影相等(大小和方向)。
用公式表达即为:

瞬心法
刚体做平面运动时,任意瞬时平面图形上存在且仅存在一个点,在此瞬时该点的绝对速度为0,称该点为此瞬时刚体的速度瞬心。此瞬时刚体上其他点的速度分布规律等效于此瞬时的图形以刚体的角速度 绕瞬心做顶轴转动时的速度。一般纯滚动的情形时。与固定面之接触点即为该时刻的速度瞬心。普通的速度瞬心为与不平行的两点速度相垂直的两线的交点。
绕瞬心做顶轴转动时的速度。一般纯滚动的情形时。与固定面之接触点即为该时刻的速度瞬心。普通的速度瞬心为与不平行的两点速度相垂直的两线的交点。
加速度分析
点的分析
1. 当动系平动时

2.动系转动时

其中 为科氏加速度,且
为科氏加速度,且 。其中中的一个
。其中中的一个 是反映由于牵连运动(转动)引起方向的变化,另一个反映了相对运动引起的的大小的变化。
是反映由于牵连运动(转动)引起方向的变化,另一个反映了相对运动引起的的大小的变化。
刚体上各点的加速度分析
在刚体上选择基点A,取B为动点,设A点的加速度为

平面运动的角速度为,角加速度为,则相对加速度为

则有加速度合成定理得

 其中有
其中有 

 方向由B指向A。
方向由B指向A。
 方向垂直AB
方向垂直AB
 刚体绕平行轴转动时有
刚体绕平行轴转动时有 
 一般在分析问题的时候会联立
一般在分析问题的时候会联立
对问题进行求解。
虚位移原理
虚位移的定义为在给定瞬时,质系中质点所做的、且为约束所允许的任意无限小的位移成为虚位移。只所以我认为虚位移主要与刚体中的速度分析有直接联系,是因为在一般问题的分析中,点的虚位移的方向即为系统如果可以动的时候该点的速度方向,且与假设运动中的速度大小成正比。当有几个机构共同存在时,则会用到速度瞬心去求得两个机构之间的关系。
而虚位移原理说的是理想约束的质点系,其平衡的充要条件是:作用在质点系的主动力在任一虚位移上所做的虚功为0,即
 或
或
当然,引入广义坐标和广义力以后会更加简便的求解,多个机构连在一起的问题,广义坐标即为质系的自由度。而广义力 。平衡条件即可表示为
。平衡条件即可表示为 。用广义坐标方便求解是因为由于广义坐标相互独立,因此可以令一个
。用广义坐标方便求解是因为由于广义坐标相互独立,因此可以令一个 而其他的广义虚位移为0,计算时将会省去很多麻烦。
而其他的广义虚位移为0,计算时将会省去很多麻烦。
系统中主动力为优势力时,因为有

因此广义坐标中表示时的平衡条件为

经研究表明,当势能具有极小值时,平衡才是稳定的。
达朗贝尔原理
达朗贝尔原理其实就是引入一个惯性力的概念,把动力学问题变成了静力学问题。因为我觉得达朗贝尔原理与刚体平面运动微分方程类似,故在此将两者结合在一起来谈。
达朗贝尔运力的叙述与证明
对非自由质点,主动力为F,约束力FN,由牛顿第二定律得

移项后有
引入广兴力的概念
就会有
对于质点系则有
 (i=1,2,3...,n)
(i=1,2,3...,n)
在求解静力学问题的时候,因为内力是成对出现可以消掉,因而不出现在平衡方程中,因而有

之所以说此处与前面的加速度分析有直接关系是因为此处的惯性力与加速度直接相关,如果加速度分析不对,惯性力必然会算错,用达朗贝尔原理后必然结果会算错。
而达朗贝尔原理在此处分析刚体的问题还是比较多的,因此在刚体分析的时候会出现力系向质心简化的问题。对于刚体平面运动还会有惯性力偶。在分析的时候会有


而对于刚体平面运动微分方程的形式

在我看来两者的区别完全就是移项与不移项的问题。
动力学三大定理
质点系的动量定理

质点系的动量矩定理

质点系的动能定理

其中T2和T1分别表示质系在任意路程的运动中的终点和起点的动能。 表示作用在力系上的全部力在这段路程中所做的功的和。
表示作用在力系上的全部力在这段路程中所做的功的和。
动力学普遍方程

仔细观察此式,并对比达朗贝尔原理及虚位移原理,你会发下这公式其实就是达朗贝尔原理再用上虚位移原理的结果。
拉格朗日方程
当主动力有势时,势能
此时会有
其中 称为质系的拉格朗日函数。
称为质系的拉格朗日函数。
拉格朗日方程在解决某些广义坐标为两个或者两个以上的问题的时候,会有很大的优势。
以上就是我的学期总结,还是那么的认为,学习应用前提必须是先了解了简单的定义、速度加速度分析的等基础后才可以更哈的学习后面的各种原理。
由简到繁,由繁回归简单,万物所归。
第二篇:理论力学复习总结(点)
第一篇 静力学
第1 章静力学公理与物体的受力分析
相互平衡的力,若其中两个力的作用线汇交于一点,则此三个力必在同一平面内,且第三个力的作用线通过汇交点。
公理4 作用与反作用定律 :两物体间相互作用的力总是同时存在,且其大小相等、方向相反,沿着同一直线,分别作用在两个物体上。
1. 公理5 钢化原理 :变形体在某一力系作用下平衡,若将它钢化成刚体,其平衡状
例2-8
如图2.-17(a)所示的结构中,各构件自重忽略不计,在构件AB上作用一力偶,其力偶矩为500kN?m,求A、C两点的约束力。
解 构件BC只在B、C两点受力,处于平衡状态,因此BC是二力杆,其受力如图2-17(b)所示。
由于构件AB上有矩为M的力偶,故构件AB在铰链A、B处的一对作用力FA、FB’构成一力偶与矩为M的力偶平衡(见图2-17(c))。由平面力偶系的平衡方程∑Mi=0,得
﹣Fad+M=0
则有 FA=FB’ N=471.40N
N=471.40N
由于FA、FB’为正值,可知二力的实际方向正为图2-17(c)所示的方向。
根据作用力与反作用力的关系,可知FC=FB’=471.40N,方向如图2-17(b)所示。
第3章平面任意力系
1. 合力矩定理:若平面任意力系可合成为一合力。则其合力对于作用面内任意一点之矩等于力系中各力对于同一点之矩的代数和。
2. 平面任意力系平衡的充分和必要条件为:力系的主失和对于面内任意一点Q的主矩同时为零,即FR`=0,Mo=0.
3. 平面任意力系的平衡方程: ∑Fx=0, ∑Fy=0, ∑Mo(F)=0.平面任意力系平衡的解析条件是,力系中所有力在作用面内任意两个直角坐标轴上投影的代数和分别等于零,各力对于作用面内任一点之矩的代数和也是等于零.
例3-1
如图3-8(a)所示,在长方形平板的四个角点上分别作用着四个力,其中F1=4kN,F2=2kN,F3=F4=3kN,平板上还作用着一力偶矩为M=2kN·m的力偶。试求以上四个力及一力偶构成的力系向O点简化的结果,以及该力系的最后合成结果。
解 (1)求主矢FR’,建立如图3-8(a)所示的坐标系,有
F’Rx=∑Fx=﹣F2cos60°+F3+F4cos30°=4.598kN
F’Ry=∑Fy=F1-F2sin60°+F4sin30°=3.768kN
所以,主矢为
F’R= =5.945kN
=5.945kN
主矢的方向
cos(F’R,i)= =0.773, ∠(F’R,i)=39.3°
=0.773, ∠(F’R,i)=39.3°
cos(F’R,j)= =0.634,∠(F’R,j)=50.7°
=0.634,∠(F’R,j)=50.7°
(2)求主矩,有
M0=∑M0(F)=M+2F2cos60°-2F2+3F4sin30°=2.5kN·m
由于主矢和主矩都不为零,故最后的合成结果是一个合力FR,如图3-8(b)所示,FR=F’R,合力FR到O点的距离为
d= =0.421m
=0.421m
例3-10
连续梁由AC和CE两部分在C点用铰链连接而成,梁受载荷及约束情况如图3-18(a)所示,其中M=10kN·m,F=30kN,q=10kN/m,l=1m。求固定端A和支座D的约束力。
解 先以整体为研究对象,其受力如图3-18(a)所示。其上除受主动力外,还受固定端A处的约束力Fax、Fay和矩为MA的约束力偶,支座D处的约束力FD作用。列平衡方程有
∑Fx=0,Fax-Fcos45°=0
∑Fy=0,FAy-2ql+Fsin45°+FD=0
∑MA(F)=0,MA+M-4ql ²+3FDl+4Flsin45°=0
以上三个方程中包含四个未知量,需补充方程。现选CE为研究对象,其受力如图3-(b)所示。以C点为矩心,列力矩平衡方程有
∑MC(F)=0,- ql ²+FDl+2Flsin45°=0联立求解得
ql ²+FDl+2Flsin45°=0联立求解得
FAx=21.21kN,Fay=36.21kN,MA=57.43kN·m,FD=﹣37.43kN
第4章 考虑摩擦的平衡问题
1. 摩擦角:物体处于临界平衡状态时,全约束力和法线间的夹角。tanψm=fs
2. 自锁现象:当主动力即合力Fa的方向、大小改变时,只要Fa的作用线在摩擦角内,C点总是在B点右侧,物体总是保持平衡,这种平衡现象称为摩擦自锁。
例4-3
梯子AB靠在墙上,其重为W=200N,如图4-7所示。梯长为l,梯子与水平面的夹角为θ=60°已知接触面间的摩擦因数为0.25。今有一重650N的人沿梯上爬,问人所能达到的最高点C到A点的距离s为多少?
解 整体受力如图4-7所示,设C点为人所能达到的极限位置,此时
FsA=fsFNA,FsB=fsFNB
∑Fx=0,FNB-FsA=0
∑Fy=0,FNA+FsB-W-W1=0
∑MA(F)=0,-FNBsinθ-FsBlcosθ+Wcosθ+W1scosθ=0
联立求解得 S=0.456l
第5章 空间力系
1. 空间汇交力系平衡的必要与充分条件是:该力系的合力等于零,即FR=∑Fi=0
2. 空间汇交力系平衡的解析条件是:力系中各力在三条坐标轴上投影的代数和分别等于零.
3. 要使刚体平衡,则主失和主矩均要为零,即空间任意力系平衡的必要和充分条件是:该力系的主失和对于任一点的主矩都等于零,即FR`=∑Fi=0,Mo=∑Mo(Fi)=0
4. 均质物体的重力位置完全取决于物体的几何形状,而与物体的重量无关.若物体是均质薄板,略去Zc,坐标为xc=∑Ai*xi/A,yc=∑Ai*yi/A
5. 确定物体重心的方法
(1) 查表法
(2) 组合法:①分割法;②负面积(体积)法
(3) 实验法
例5-7
试求图5-21所示截面重心的位置。
解 将截面看成由三部分组成:半径为10mm的半圆、50mm×20mm的矩形、半径为5mm的圆,最后一部分是去掉的部分,其面积应为负值。取坐标系Oxy,x轴为对称轴,则截面重心C必在x轴上,所以yc=0.这三部分的面积和重心坐标分别为
A1= mm ²=157mm ²,x1=-
mm ²=157mm ²,x1=- =-4.246mm,y1=0
=-4.246mm,y1=0
A2=50×20mm ²=1000mm ²,x2=25mm,y2=0
A3=-π×5 ²mm ²=-78.5mm ²,x3=40mm,y3=0
用负面积法,可求得
Xc= =
=
第二篇 运动学
第6章 点的运动学
6.2直角坐标法
运动方程 x=f(t) y=g(t) z=h(t) 消去t可得到轨迹方程 f(x,y,z)=0 其中
例题6 -1 椭圆规机构如图6-4(a)所示,曲柄oc以等角速度w绕O转动,通过连杆AB带动滑块A、B在水平和竖直槽内运动,OC=BC=AC=L 。求:(1)连杆上M点(AM=r)的运动方程;(2)M点的速度与加速度。
解:(1)列写点的运动方程
由于M点在平面内运动轨迹未知,故建立坐标系。点M是BA杆上的一点,该杆两端分别被限制在水平和竖直方向运动。曲柄做等角速转动,Φ=wt 。由这些约束条件写出M点运动方程x=(2L-r)coswt y=rsinwt 消去t 得轨迹方程:(x/2L-r)²+(y/x)²=1
(2)求速度和加速度
对运动方程求导,得 dx/dt=-(2L-r)wsinwt dy/dt=rsinwt 再求导a1=-(2L-r)w²coswt a2=-rw²sinwt 由式子可知a=a1i+a2j=-w²r
6.3自然法
2.自然坐标系:b=t×n 其中b为副法线 n为主法线 t
3.点的速度 v=ds/dt 切向加速度 at=dv/dt 法向加速度 an=v²/p
习题6-10 滑道连杆机构如图所示,曲柄OA长r,按规律θ=θ’+wt 转动(θ以rad计,t以s计),w为一常量。求滑道上C点运动、速度及加速度方程。
解:
第七章 刚体的基本运动
7.1刚体的平行运动:刚体平移时,其内所有各点的轨迹的形状相同。在同一瞬时,所有各点具有相同的速度和相同的加速度。刚体的平移问题可归结为点的运动问题。
7.2刚体的定轴转动:瞬时角速度 w=lim△θ∕△t=dθ/dt
瞬时角加速度a=lim△w∕△t=dw/dt=d²θ/dt²
转动刚体内任一点速度的代数值等于该点至转轴的距离与刚体角速度的乘积
a=√(a² +b²)=R√(α²+w²) θ=arctan|a|/b =arctan|α|/w²
转动刚体内任一点速度和加速度的大小都与该点至转轴的距离成正比。
例题7-1如图所示平行四连杆机构中,O1A=O2B=0.2m ,O1O2=AB=0.6m ,AM=0.2m ,如O1A按φ=15πt的规律转动,其中φ以rad计,t以s计。试求t=0.8s时,M点的速度与加速度。
解:在运动过程中,杆AB始终与O1O2平行。因此,杆AB为平移,O1A为定轴转动。根据平移的特点,在同一瞬时M、A两点具有相同的速度和加速度。A点做圆周运动,它的运动规律为 s=O1A·φ=3πt m
所以 VA=ds/dt=3π m/s atA=dv/dt=0 anA= (V A) ²/O1A=45 m/s
为了表示Vm 、am 的2,需确定t=0.8s时,AB杆的瞬时位置。当t=0.8s时,s=2.4πm
O1A=0.2m , φ=2.4π/0.2=12π,AB杆正好第6次回到起始位置O点处,Vm 、am的方向如图所示。
第8章点的合成运动
8.1合成运动的概念:相对于某一参考系的运动可由相对于其他参考系的几个运动组合而成,这种运动称为合成运动。
当研究的问题涉及两个参考系时,通常把固定在地球上的参考系称为定参考系,简称定系。吧相对于定系运动的参考系称为动参考系,简称动系。研究的对象是动点。动点相对于定参考系的运动称为绝对运动;动点相对于动参考系的运动称为相对运动;动参考系相对于定参考系的运动称为牵连运动。动系作为一个整体运动着,因此,牵连运动具体有刚体运动的特点,常见的牵连运动形式即为平移或定轴转动。
动点的绝对运动是相对运动和牵连运动合成的结果。绝对运动也可分解为相对运动和牵连运动。在研究比较复杂的运动时,如果适当地选取动参考系,往往能把比较复杂的运动分解为两个比较简单的运动。这种研究方法无论在理论上或实践中都具有重要意义。
动点在相对运动中的速度、加速度称为动点的相对速度、相对加速度,分别用vr和ar表示。动点在绝对运动中的速度、加速度称为动点的绝对速度和绝对加速度,分别用va和aa表示。换句话说,观察者在定系中观察到的动点的速度和加速度分别为绝对速度和绝对加速度;在动系中观察到动点的速度和加速度分别为相对速度和相对加速度。
在某一瞬时,动参考系上与动点M相重合的一点称为此瞬时动点M的牵连点。如在某瞬时动点没有相对运动,则动点将沿着牵连点的轨迹而运动。牵连点是动系上的点,动点运动到动系上的哪一点,该点就是动点的牵连点。定义某瞬时牵连点相对于定参考系的速度、加速度称为动点的牵连速度、牵连加速度,分别用ve和ae表示。
动系O’x’y’与定系Oxy之间的坐标系变换关系为
x=x0+x’cosθ-y’sinθ y=y0+x’sinθ+y’cosθ
在点的绝对运动方程中消去时间t,即得点的绝对运动轨迹;在点的相对运动方程中消去时间t,即得点的相对运动轨迹。
例题8-4 矿砂从传送带A落到另一传送带B上,如图所示。站在地面上观察矿砂下落的速度为v1=4 m/s ,方向与竖直线成30角。已知传送带B水平传动速度v2=3 m/s.求矿砂相对于传送带B的速度。
解:以矿砂M为动点,动系固定在传送带B上。矿砂相对地面的速度v1为绝对速度;牵连速度应为动参考系上与动点相重合的哪一点的速度。可设想动参考系为无限大,由于它做平移,各点速度都等于v2 。于是v2等于动点M的牵连速度。
由速度合成定理知,三种速度形成平行四边形,绝对速度必须是对角线,因此作出的速度平行四边形如图所示。根据几何关系求得
Vr=√(ve²+va²-2vevacos60º)=3.6 m/s
Ve与va间的夹角 β=arcsin(ve/vr*sin60º)=46º12’
总结以上,在分析三种运动时,首先要选取动点和动参考系。动点相对于动系是运动的,因此它们不能处于同一物体;为便于确定相对速度,动点的相对轨迹应简单清楚。
8.3当牵连运动为平移时,动点的绝对加速度等于牵连加速度和相对加速度的矢量和。
第9章 刚体的平面运动
9.1刚体平面运动的分析:其运动方程x=f1(t) y=f2(t) θ=f3(t)完全确定平面运动刚体的运动规律
在刚体上,可以选取平面图形上的任意点为基点而将平面运动分解为平移和转动,其中平面图形平移的速度和加速度与基点的选择有关,而平面图形绕基点转动的角速度和角加速度与基点的选择无关。
9.2刚体平面运动的速度分析:
平面图形在某一瞬时,其上任意两点的速度在这两点的连线上的投影相等,这就是速度投影定理。Vcosa=vcosb
例9-1
椭圆规尺AB由曲柄OC带动,曲柄以匀角速度ω0绕轴O转动,如图9-7所示,OC=BC=AC=r,求图示位置时,滑块A、B的速度和椭圆规尺AB的角速度。
解 已知OC绕轴O做定轴转动,椭圆规尺AB做平面运动,vc=ω0r。
(1) 用基点法求滑块A的速度和AB的角速度。因为C的速度已知,选C为基点。
vA=Vc+VAC
式中的vc的大小和方向是已知的,vA的方向沿y轴,vAC的方向垂直于AC,可以作出速度矢量图,如图9-7所示。
由图形的几何关系可得
vA=2vccos30°= ω0r,Vac=Vc,Vac=ωABr
ω0r,Vac=Vc,Vac=ωABr
解得
ωAB=ω0(顺时针)
(2) 用速度投影定理求滑块B的速度,B的速度方向如图9-7所示。
[vB]BC=[vC]BC
Vccos30°=vBcos30°
解得
Vb=vC=ω0r
例9-5
图9-15所示机构中,长为l的杆AB的两端分别与滑块A和圆盘B沿竖直方向光滑移动,半径为R的圆盘B沿水平直线做纯滚动。已知在图示的位置时,滑块A的速度为vA,求该瞬时杆B端的速度、杆AB的角速度、杆AB中点D的速度和圆盘的角速度。
解 根据题意,杆AB做平面运动,vA的方向已知,圆盘中心B的速度沿水平方向,则杆AB的速度瞬心为P点,有
ωAB= =
=
vB=ωAB·BP=vAtanθ
vD=ωAB·DP=· =
=
圆盘B做平面运动,C点为其速度瞬心,则ωB= =
= tanθ
tanθ
第三篇 动力学
第10章质点动力学的基本方程
1. 牛顿第一定律:不受了作用(包括受到平衡力系作用)的质点,将保持静止或做匀速直线运动。又称惯性定律。
2. 牛顿第二定律:质点的质量与加速度的乘积,等于作用于质点的力的大小,加速度的方向与力的方向相同。F =ma
3. 牛顿第三定律:两个物体间的作用力与反作用力总是大小相等、方向相反,沿着同一直线,同时分别作用在这两个物体上。
例10-2:曲柄连杆机构如图10-2(a)。曲柄OA以匀角速度ω转动,OA=r,AB=l,当λ=r/l比较小时,以O为坐标原点,滑块B的运动方程可近似表示为
X=l(1- )+r(cosωt+
)+r(cosωt+ )
)
如滑块的质量为m,忽略摩擦及连杆AB的质量,试求当ψ=ωt=0和 时,连杆AB所受的力。
时,连杆AB所受的力。
解 以滑块B为研究对象,当ψ=ωt时,其受力如图10-2(b)所示。由于连杆不计质量,AB应为二力杆,所以受平衡力系作用,它对滑块B的拉力F沿AB方向。滑块啱x轴的运动方程
Max=-Fcosβ
由滑块B的运动方程可得
Ax= =-rω²(cosωt+λcos2ωt)
=-rω²(cosωt+λcos2ωt)
当ωt=0时,ax=-rω²(1+λ),且β=0,得
F=mrω²(1+λ)
杆AB受拉力。
同理可得,当ωt=时,F=- ,杆AB受压力
,杆AB受压力
例10-5
物块在光滑水平面上并与弹簧相连,如图10-5所示。物块的质量为m,弹簧的刚度系数为k。在弹簧拉长变形量为a时,释放物块。求物块的运动规律。
解 以弹簧未变形处为坐标原点O,设物块在任意坐标x处弹簧变形量为|x|,弹簧力大小为F=k|x|,并指向O点,如图10-5所示,则此物块沿x轴的运动微分方程为 m=Fx=-kx
令ω²n= ,将上式化为自由振动微分方程的标准形式 +ω²nx=0
,将上式化为自由振动微分方程的标准形式 +ω²nx=0
上式的解可写为X=Acos(ωnt+θ)
其中A、θ为任意常数,应由运动的初始条件决定。由题意,当t=0时, =0,x=a,代入上式,解得θ=0,A=a,代入式中,可解得运动方程为X=acosωnt
=0,x=a,代入上式,解得θ=0,A=a,代入式中,可解得运动方程为X=acosωnt
 第11章动力定理
第11章动力定理
1. 动量:等于质点的质量与其速度的乘积.
2. 质点系的动量定理:
① 微分形式:质点系的动量对时间的一阶导数等于作用在该质点系上所有外力的矢量和.
② 积分形式:质点系的动量在任一时间间隔内的变化,等于在同一时间间隔内作用在该指点系上所有外力的冲凉的矢量和.(冲凉定理)
3. 质心运动守恒定律:如果所有作用于质心系的外力在x轴上投影的代数和恒等于零,即∑F=0,则Vcx=常量,这表明质心的横坐标xc不变或质心沿x轴的运动时均匀的。
例11-5:已知液体在直角弯管ABCD中做稳定流动,流量为Q,密度为ρ,AB端流入截面的直径为d,另一端CD流出截面的直径为d1。求液体对管壁的附加动压力。
解 取ABCD一段液体为研究对象,设流出、流入的速度大小为v1和v2,则
V1= ,v2=
,v2=
建立坐标系,则附加动反力在x、y轴上的投影为F’’Nx=ρQ(v2-0)=
F’’Ny=ρQ [0-(-v1)]
例11-7:图11-6所示的曲柄滑块机构中,设曲柄OA受力偶作用以匀角速度w转动,滑块B沿x轴滑动。若OA=AB=l,OA及AB都为均质杆,质量都为m1,滑块B的质量为m2。试求此系统的质心运动方程、轨迹及此系统的动量。
解 设t=0时杆OA水平,则有=wt。将系统看成是由三个质点组成的,分别位于杆OA的中点、杆AB的中点和B点。系统质心的坐标为
Xc= cosωt=
cosωt= lcosωt
lcosωt
Yc= sinωt=
sinωt= lsinωt
lsinωt
上式即系统质心C的运动方程。由上两式消去时间t,得
[ xc] ²+[
xc] ²+[ ] ²=1
] ²=1
即质心C的运功轨迹为一椭圆,如图11-6中虚线所示。应指出,系统的动量,利用式(11-15)的投影式,有
Px=mvcx=(2m1+m2) =-2(m1+m2)lωsinωt
=-2(m1+m2)lωsinωt
Py=mvcy=(2m1+m2) =m1lωcosωt
=m1lωcosωt
例11-11:平板D放置在光滑水平面上,板上装有一曲柄、滑杆 、套筒机构,十字套筒C保证滑杆AB为平移,如图示。已知曲柄OA是一长为r,质量为m的均质杆,以匀角速度w绕轴O转动。滑杆AB的质量为4m,套筒C的质量为2m,机构其余部分的质量为20m,设初始时机构静止,试求平板D的水平运动规律x(t)。
解 去整体为质点系,说受的外力有各部分的重力和水平面的反力。因为外力在水平轴上的投影为零,且初始时静止,因此质点系质心在水平轴上的坐标保持不变。建立坐标系,并设平板D的质心距O点的水平距离为a,AB长为l,C距O点的水平距离为b,则初始时质点系质心的水平轴的坐标为
Xc1= =
=
设经过时间t,平板D向右移动了x(t),曲柄OA转动了角度wt,此时质点系质心坐标为
Xc2=
因为在水平方向上质心守恒,所以xc1=xc2, 解得:X(t)= (1-cosωt)
(1-cosωt)
P207习题11-3
第12章动量矩定理
1. 质点和质点系的动量矩:
⑴指点对点O的动量矩失在z轴的投影,等于对z轴的动量矩,即「Lo(mv)」=Lz(mv)
⑵质点系对固定点O的动量矩等于各质点对同一点O的动量矩的矢量和.即:Lo=∑Lo(mv)
2. 绕定轴转动刚体对于转轴的动量矩等于刚体对转轴的装动惯量与角速度的乘积.(Lz=wJz)
3. 平行轴定理:刚体对于任一轴的转动惯量,等于刚体对通过质心并与该轴平行的轴转动惯量,加上刚体的质量与两轴间距离平方的乘积.
4. 动量矩定理:质点对某定点的动量矩对时间的一阶导数等于作用于质点的力对同一点的矩.
例12-2:已知均质细杆和均质圆盘的质量都为m,圆盘半径为R,杆长3R,求摆对通过悬挂点O并垂直于图面的Z轴的转动惯量。
解 摆对Z轴的转动惯量为
Jz=Jz杆+Jz盘
杆对Z轴的转动惯量为
Jz杆= ml ²=m(3R)²=3mR ²
ml ²=m(3R)²=3mR ²
圆盘对其质心的转动惯量为
Jzc2= mR ²
mR ²
利用平行轴定理
Jz盘= Jzc2+m(R+l ²)=mR ²+16mR²= mR²
mR²
所以
Jz= Jz杆+Jz盘=3mR ²+mR²= mR ²
mR ²
例12-3:质量为M1的塔伦可绕垂直于图面的轴O转动,绕在塔轮上的绳索于塔轮间无相对滑动,绕在半径为r的轮盘上的绳索于刚度系数为k的弹簧相连接,弹簧的另一端固定在墙壁上,绕在半径为R的轮盘上的绳索的另一端竖直悬挂质量为M2的重物。若塔轮的质心位于轮盘中心O,它对轴O的转动惯量Jo=2mr,R=2r,M1=m,M2=2m.求弹簧被拉长s时,重物M2的加速度。
解 塔轮做定轴转动,设该瞬时角速度为w,重物作平移运动,则它的速度为v=Rw,它们对O点的动量矩分别为Lo1,Lo2,大小为
Lo1=-Jo·w=-2mr2ω,Lo2=-2mR2w=-8mr2ω²
系统对O点的外力矩为
M0( )=F·r-m2g·R=ksr-4mgr
)=F·r-m2g·R=ksr-4mgr
根据动量矩定理 L0=ΣM0()
L0=ΣM0()
得10mr² =(4mg-ks)r
=(4mg-ks)r
α==
因重物的加速度a2=Rα,所以:a2=Rα=
第13章动能定理
1. 质点系动能的微分,等于作用在质点系上所有力所做元功的和,这就是质点系微分形式的动能定理.(13-23)
2. 质点系积分形式的动能定理:质点系在某一运动过程中动能的改变量,等于作用在质点系上所有力在这一过程中所做的功的和.(13-24,13-25)
3. 力的功率等于切向力与力作用点速度大小的乘积(13-28)
4. 作用在转动刚体上力的功率等于该力堆转轴的矩与角速度的乘积.(13-29)
5. 质点系动能对时间的一阶导数等于作用在指点系上所有力的功率的代数和(功率方程13-30)
例13-5:重物A和重物B通过动滑轮D和定滑轮C而运动。如果重物A开始时向下的速度为v0,试问重物A下落多大距离时,其速度增大一倍。设重物A和B的质量均为m1,滑轮D和C的质量均为m2,且为均质圆盘。重物B于水平间的动摩擦因数位f,绳索不能伸长,其质量忽略不计。
解 以系统为研究对象。系统中重物A和B作平移,定滑轮C做定轴转动,动滑轮D做平面运动。初瞬时A的速度大小为v0,则滑轮D轮心的速度大小为v0,角速度为ωD= ;定滑轮C的角速度为ωC=
;定滑轮C的角速度为ωC= ;重物B的速度大小为2v0。于是运动初瞬时系统的动能为
;重物B的速度大小为2v0。于是运动初瞬时系统的动能为
T1=m1v0²+m2v0²+(m2rD²)() ²+(m2rC²)( ) ²+m12v0 ²=
) ²+m12v0 ²= (10m1+7m2)
(10m1+7m2)
速度增大一倍时的动能为T2= (10m1+7m2)
(10m1+7m2)
设重物A下降h高度时,其速度增大一倍。所有的力所做的功为
∑ =m1gh+m2gh-f’m1g·2h=[m1g(1-2f’)+m2g]h
=m1gh+m2gh-f’m1g·2h=[m1g(1-2f’)+m2g]h
由式有
 (10m1+7m2)= [m1g(1-2f’)+m2g]h
(10m1+7m2)= [m1g(1-2f’)+m2g]h
解得h=
例13-7:在对称杆的A点,作用一竖直常力F,开始时系统静止。求连杆OA运功动到水平位置时的角速度。设连杆长均为l,质量均为m,均质圆盘质量为m1,且作纯滚动。
解 以系统为研究对象。由系统从静止开始运动,故初瞬时系统的动能为
T1=0
当杆OA运动到水平位置时,杆端B为杆AB的速度瞬心,因此轮B的角速度为零。设此时杆OA的角速度为w,由于OA=AB,所以杆AB的角速度亦为w,系统此时的动能为
T2=JOAω²+JABω²=( ) ω²+() ω²=ω²
) ω²+() ω²=ω²
所有的力所做的功为 ∑=2(mg )+Flsinα=(mg+F)lsinα
)+Flsinα=(mg+F)lsinα
由  ω²-0=(mg+F)lsinα
ω²-0=(mg+F)lsinα
解得ω=
-
理论力学课程总结
理论力学课程总结一用一条你认为的主线来贯穿总结本课程的学习内容理论力学是一门研究物体机械运动的一般规律的科学经过一学期的学习对理论…
-
《理论力学》之“静力学”知识大总结
静力学知识要点绪论:1.理论力学研究对象:刚体;物体的运动效应(外效应)。静力学:物体在力的作用下保持平衡条件;2.三部分内容的研…
-
理论力学总结
理论力学xxx班xxx学号xxxxxxxx20xx学年理论力学课程总结说到课程总结不得不先谈一下理论力学这一学科理论力学属于一般力…
-
理论力学重点总结
绪论1学习理论力学的目的在于掌握机械运动的客观规律能动地改造客观世界为生产建设服务2学习本课程的任务一方面是运用力学基本知识直接解…
- 理论力学,知识总结
-
理论力学学习体会
不知不觉,大二上学期就这么快结束了。这学期我们学习了老师您教授的理论力学这门课程,学了一个学期,学习的过程中有喜有忧吧。其实当我们…
-
理论力学复习总结(知识点)
第一篇静力学第1章静力学公理与物体的受力分析1.1静力学公理公理1二力平衡公理:作用于刚体上的两个力,使刚体保持平衡的必要和充分条…
-
理论力学复习公式
静力学知识点静力学公理和物体的受力分析本章总结1.静力学是研究物体在力系作用下的平衡条件的科学。2.静力学公理公理1力的平行四边形…
-
《理论力学》之“静力学”知识大总结
静力学知识要点绪论:1.理论力学研究对象:刚体;物体的运动效应(外效应)。静力学:物体在力的作用下保持平衡条件;2.三部分内容的研…
-
理论力学考试知识点总结
《理论力学》考试知识点静力学第一章静力学基础1、掌握平衡、刚体、力的概念以及等效力系和平衡力系,静力学公理。2、掌握柔性体约束、光…
-
理论力学(运动学)总结
5点的运动学矢量法直角坐标法自然(弧坐标)法切向单位矢量=dr/ds主法向单位矢量副法线单位矢量??曲率??d?ds?s1????…