嵌入式实验报告
嵌入式系统设计报告
设计课题:水压水温的检测
专业:11级通信工程
学号:1103609084
姓名:高世通
指导老师:张彦波
一、设计背景
热水供暖系统需要时刻对热水进行水温和水压的实时监控,才能保证供暖的有效性和稳定性。这就需要有一个可靠地水温、水压数据采集的监控系统来实现这样的需求。
二、系统功能的流程图:

如图所示:
三、系统的硬件设计
1、单片机AT89C51
单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。设计用到的AT89C51是一种带4K字节FLASH存储器的低电压、高性能CMOS 8位微处理器,其主要特性有:128×8位内部RAM、32可编程I/O线、两个16位定时器/计数器、5个中断源、可编程串行通道、低功耗的闲置和掉电模
式、片内振荡器和时钟电路。
图1 51单片机引脚接线图
本设计用到定时器/计数器的功能,在时间计数设置时,用定时器/计数器0的计数功能,外部以脉冲形式输入作为计数器的计数脉冲,这里外部脉冲间隔约为1s,计数实现时间计数功能。
2、数字温度传感器ds18b20
数字温度传感器就是能把温度物理量,通过温度敏感元件和相应电路转换成方便计算机、plc、智能仪表等数据采集设备直接读取得数字量的传感器。设计用到的ds18b20数字温度传感器耐磨耐碰,体积小,使用方便,封装形式多样,适用于各种狭小空间设备数字测温和控制领域。
其主要性能描述:
1.独特的单线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯;
2.测温范围 -55℃~+125℃,固有测温分辨率0.5℃;
3.支持多点组网功能,多个DS18B20可以并联在唯一的三线上,最多只能并联8个,实现多点测温;
4.工作电源: 3~5V/DC; 
5.在使用中不需要任何外围元件;
6.测量结果以9~12位数字量方式串行传送。
本设计中,用ds18b20来采集供暖水的水温数据,以单线串口形式将数据输送给单片机处理。
图2 ds18b20引脚图
 3、压力传感器mpx4250
3、压力传感器mpx4250
压力传感器是工业实践中最为常用的一种传感器,而我们通常使用的压力传感器主要是利用压电效应制造而成的,这样的传感器也称为压电传感器。压电传感器结构简单、体积小、质量累世、功耗小、寿命长,特别是它具有良好的动态特性,因此适合有很宽频带的周期作用力和高速变化的冲击力。
mpx4250的主要性能指标:
1.工作压力0 ~ 36.3 PSI;
2.输出0.2 ~ 4.9V;
3.精确度±1.4%;
4.电源电压4.85 V ~ 5.35 V;
5.工作温度-40°C ~ 125°C。
图3 mpx4250引脚功能图
本设计中,用mpx4250来采集供暖水压数据,1端口输出采集的水压数据到adc0808模数转换芯片。
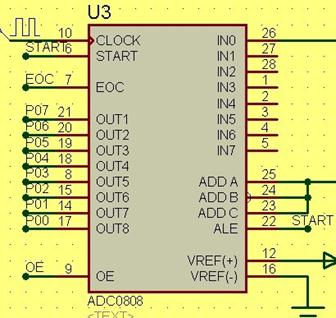
4、模数转换芯片adc0808
ADC0808是美国国家半导体公司生产的CMOS工艺8通道,8位逐次逼近式A/D模数转换器。其内部有一个8通道多路开关,它可以根据地址码锁存译码后的信号,只选通8路模拟输入信号中的一个进行A/D转换。
 adc0808主要特性:
adc0808主要特性:
1. 8路输入通道,8位A/D转换器,即分辨率为8位;
2.具有转换起停控制端;
3.转换时间为100μs(时钟为640kHz时),130μs(时钟为500kHz时);
4.单个+5V电源供电;
5.模拟输入电压范围0~+5V,无需零点和满刻度校准;
6.工作温度范围为-40~+85摄氏度; 图4 adc0808引脚接线图
7.低功耗,约15mW
本设计中,adc0808模数芯片用于压力传感器mpx4250的水压模拟量串口输入的数据转化为数字量并口输出给单片机P0口的数据。
 5、8个8段数码管与数码管显示驱动芯片max7219
5、8个8段数码管与数码管显示驱动芯片max7219
led数码管是由多个发光二极管封装在一起组成“8”字型的器件,引线已在内部连接完成,只需引出它们的各个笔划,公共电极。led数码管根据LED的接法不同分为共阴和共阳两类。8段led数码管分为8个显示段,分别是:a、b、c、d、e、f、g、dp,dp是小数点位段。
根据数码管的驱动方式的不同,可以分为静态式和动态式两类。 图5 数码管引脚定义
静态驱动显示也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。
动态扫描显示即轮流向各位数码管送出字形码和相应的位选,利用发光管的余辉和人眼视觉暂留作用,使人的感觉好像各位数码管同时都在显示。
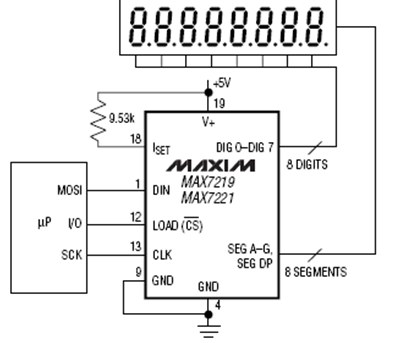
MAX7221是一种集成化的串行输入/输出共阴极显示驱动器,它连接微处理器与8位数字的7段数字LED显示,也可以连接条线图显示器或者64个独立的LED。其上包括一个片上的B型BCD编码器、多路扫描回路,段字驱动器,而且还有一个8*8的静态RAM用来存储每一个数据。
MAX7221显示驱动芯片的主要功能特点:
1. 10MHz 连续串行口;
2. 独立的LED 段控制;
3. 高电压中断显示;
4. 共阴极LED 显示驱动;
5. 限制回转电流的段驱动来减少EMI。
图6 max7221的典型应用电路
本设计中,8个8段共阴极数码管与max7221显示芯片配合驱动显示数据。显示方式为动态显示。前4个数码管显示水温数据,精确到0.1℃。后4个数码管显示水压数据,精确到0.1kpa。同时可以切换显示计数的时间,即系统开启后运行时间的计时。
6、继电器
继电器是一种电控制器件。它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。通常应用于自动化的控制电路中,它实际上是用小电流去控制大电流运作的一种“自动开关”。当输入量达到规定值时,继电器使被控制的输出电路导通或断开。继电器具有动作快、工作稳定、使用寿命长、体积小等优点。广泛应用于电力保护、自动化、运动、遥控、测量和通信等装置中。
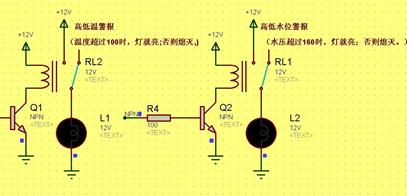
本设计中,用了两个电磁继电器对报警灯回路进行接通或断开操作。
图7 本设计中的继电器和报警灯的电路图
四、软件程序设计
1、系统硬件控制描述
1.控制器用at89c51,12M晶振;
2.采集的水压数据输入—P0口;
3.采集的水温数据输入—P2.7;
4.数码管、max7221显示驱动—P2.0~P2.2;
5.adc0808模数芯片的控制—P2.3~P2.5;
6.切换数码管显示的按钮端—P2.6;
7.继电器控制端—P3.0、P3.1。
2、c程序语言设计
自定义的h文件:
#ifndef _MAIN_H_
#define _MAIN_H_
#include<regx51.h>
#include<intrins.h>
#include<absacc.h>
#define uchar unsigned char
#define uint unsigned int
#define addo (260.0/255.0)
sbit DIN = P2^0;
sbit CS = P2^1;
sbit CLK = P2^2;
sbit START = P2^3;
sbit EOC = P2^4;
sbit OE = P2^5;
sbit KEY = P2^6;
sbit DQ = P2^7;
sbit NPN1 = P3^0;
sbit NPN2 = P3^1;
#endif
#ifndef _DISPLAY_H_
#define _DISPLAY_H_
#include"main.h"
extern uchar table[8];
extern uchar table1[8];
extern uchar table2[8];
void WriteByte(uchar dat);
void MAX7221_WRITE(uchar addr,uchar dat);
void MAX7221_Initial(void);
void Display(uchar *str);
void HEXTOBCD_One(void);
void HEXTOBCD_Two(void);
#endif
#ifndef _DELAY_H_
#define _DELAY_H_
#include"main.h"
void delay_us(uchar n);
void delay_ms(uint n);
#endif
#ifndef _ADC0808_H_
#define _ADC0808_H_
#include"main.h"
uchar ADC0808_READ(void);
#endif
#ifndef _DS18B20_H_
#define _DS18B20_H_
#include"main.h"
extern uchar flag;
void DS18B20_RST(void);
uchar DS18B20_READ(void);
void DS18B20_WRITE(uchar dat);
uint DS18B20_ReadTemp(void);
#endif
#ifndef _TIME0_H_
#define _TIME0_H_
#include"main.h"
extern uchar secs;
extern uchar minutes;
extern uchar hours;
void Time0_Initial(void);
#endif
程序正文:
#include"main.h"
#include"delay.h"
#include"display.h"
#include"adc0808.h"
#include"ds18b20.h"
#include"time0.h"
uchar ADC0808_READ(void)
{
uchar temp;
START = 0;
START = 1;
START = 0;
while(EOC==0);
OE = 1;
temp = P0;
return temp;
}
void delay_us(uchar n)
{
while(n--);
}
void delay_ms(uint n)
{
uchar i;
while(n--)
{
for(i=0;i<100;i++);
}
}
uchar table[9] = {15,15,15,15,15,15,15,15};
uchar table1[8] = {1,2,3,4,5,6,7,8};
uchar table2[8] = {1,2,3,4,5,6,7,8};
void WriteByte(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{
DIN = ((dat<<i)&0x80)?1:0;
CLK = 0;
_nop_();
CLK = 1;
_nop_();
}
}
void MAX7221_WRITE(uchar addr,uchar dat)
{
CS = 0;
WriteByte(addr);
WriteByte(dat);
CS = 1;
}
void MAX7221_Initial(void)
{
MAX7221_WRITE(0x0A,0x07);
MAX7221_WRITE(0x0B,0x07);
MAX7221_WRITE(0x0C,0x01);
MAX7221_WRITE(0x0F,0x00);
MAX7221_WRITE(0x09,0xFF);
}
void Display(uchar *str)
{
uchar i;
for(i=0;i<8;i++)
{
MAX7221_WRITE(i+1,str[i]);
}
}
void HEXTOBCD_One(void)
{
table1[0] = hours/10;
table1[1] = hours%10;
table1[2] = 10;
table1[3] = minutes/10;
table1[4] = minutes%10;
table1[5] = 10;
table1[6] = secs/10;
table1[7] = secs%10;
}
void HEXTOBCD_Two(void)
{
uint temp1,temp2;
temp1 = DS18B20_ReadTemp();
temp2 = (int)(ADC0808_READ()*addo*10);
if(temp1>1000)
{
NPN1 = 1;
}
else
{
NPN1 = 0;
}
if(temp2>1600)
{
NPN2 = 1;
}
else
{
NPN2 = 0;
}
if(flag==0)
{
table2[0] = temp1/1000;
}
else
{
table2[0] = 10;
}
table2[1] = temp1%1000/100;
table2[2] = (temp1%100/10)|0x80;
table2[3] = temp1%10;
table2[4] = temp2/1000;
table2[5] = temp2%1000/100;
table2[6] = (temp2%100/10)|0x80;
table2[7] = temp2%10;
}
uchar flag = 0;
void DS18B20_RST(void)
{
DQ = 1;
delay_us(4);
DQ = 0;
delay_us(100);
DQ = 1;
delay_us(40);
}
uchar DS18B20_READ(void)
{
uchar i,temp = 0;
for(i=0;i<8;i++)
{
DQ = 0;
temp >>= 1;
DQ = 1;
if(DQ)
{
temp |= 0x80;
}
delay_us(10);
}
return temp;
}
void DS18B20_WRITE(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = (dat&0x01)?1:0;
delay_us(10);
DQ = 1;
dat >>= 1;
}
}
uint DS18B20_ReadTemp(void)
{
uchar temp_h,temp_l;
uint temp = 0;
DS18B20_RST();
DS18B20_WRITE(0xcc);
DS18B20_WRITE(0x44);
DS18B20_RST();
DS18B20_WRITE(0xcc);
DS18B20_WRITE(0xbe);
temp_h = DS18B20_READ();
temp_l = DS18B20_READ();
temp = temp_l;
temp <<= 8;
temp |= temp_h;
if(temp<0x0fff)
{
flag = 0;
}
else
{
flag = 1;
temp = ~temp+1;
}
temp = temp*(0.625);
return temp;
}
uchar secs = 0;
uchar minutes = 0;
uchar hours = 0;
void Time0_Initial(void)
{
TMOD = 0x01;
TH0 = 0x15;
TL0 = 0x9f;
ET0 = 1;
TR0 = 1;
EA = 1;
}
volatile unsigned char cnt = 0;
void Time0_Interrupt(void) interrupt 1
{
TH0 = 0x15;
TL0 = 0x9f;
cnt ++;
if(cnt==10)
{
cnt = 0;
secs ++;
}
if(secs==60)
{
secs = 0;
minutes ++;
}
if(minutes==60)
{
minutes = 0;
hours++;
}
if(hours==24)
{
hours = 0;
}
}
void main()
{
uchar ready = 0;
NPN1 = 0,NPN2 = 0;
MAX7221_Initial();
delay_us(10);
Time0_Initial();
delay_us(10);
while(1)
{
if(KEY==0)
{
delay_ms(5);
if(KEY==0)
{
ready ++;
}
while(KEY==0);
delay_ms(5);
}
switch(ready)
{
case 0:
{
Display(table);
delay_ms(10);
break;
}
case 1:
{
HEXTOBCD_One();
Display(table1);
delay_ms(10);
break;
}
case 2:
{
HEXTOBCD_Two();
Display(table2);
delay_ms(10);
break;
}
case 3:
{
Display(table);
delay_ms(10);
ready = 0;
break;
}
default:
{
break;
}
}
delay_ms(500);
}
}
-
嵌入式实验报告模板
武汉大学计算机学院08级嵌入式系统设计实验报告班级08级计科5班指导老师武小平学期20xx20xx第1学期小组成员目录一设计题目选…
-
嵌入式系统实验报告
嵌入式系统实验报告姓名:##学号:##班级:计算机科学与技术非师范121班实验一LCD控制一、实验目的1、初步掌握液晶显示屏的使用…
-
嵌入式实验报告
嵌入式实验报告姓名邓庆学号1075490019学院通信工程学院实验一电源复位时钟管理单元一实验目的1了解如何配置不同的时钟2如何使…
-
嵌入式系统实验报告
嵌入式系统实验报告学院测量与通信工程学院专业信号与信息处理学生姓名姜元学号1320xx0050指导教师董静薇一实验目的了解Boot…
-
嵌入式系统实验报告
嵌入式系统实验报告小组成员指导老师实验三键盘及LED驱动实验一实验目的1学习键盘及LED驱动原理2掌握ZLG7289芯片的使用方法…
-
嵌入式实训总结
嵌入式实训总结20xx年x月我参加了学校安排的课题实训,基地在北京,学院安排我们集体坐火车一同前去,浩浩荡荡的队伍开始出发了。刚来…
-
嵌入式--实训总结
实训总结班级卓越1301姓名刘短短三周的很快就过去了在中软国际嵌入式方向班的第二次实习马上就要结束了虽然只有短短的三周但我学会了很…
-
嵌入式实习报告
嵌入式实习报告20xx年1月13日一、嵌入式的概述:随着信息化技术的发展和数字化产品的普及,以计算机技术、芯片技术和软件技术为核心…
-
嵌入式实训报告
中北大学嵌入式实训周实训报告中北大学嵌入式实训周任务书学年第学期学院方向学生姓名设计题目鼠秦文渊软件学院嵌入式软件开发学号0921…
-
嵌入式系统实验报告
嵌入式系统设计实验报告班级学号姓名成绩指导教师1实验一11实验名称博创UP3000实验台基本结构及使用方法12实验目的1学习嵌入式…
-
嵌入式系统实验报告模板
《嵌入式系统》实验报告姓名:学号:班级:湖南工业大学电气与信息工程学院20xx年x月实验一ARM汇编指令实验1一、实验目的1.初步…