中南大学刚体转动惯量实验实验报告
第二篇:测量刚体的转动惯量
大学物理仿真实验
实验报告
西安交通大学
xxx
xxxxxxxxxxx
xxxxxxxxxxxxxxxxx
20##年6月20日
测量刚体的转动惯量
实验简介
在研究摆的重心升降问题时,惠更斯发现了物体系的重心与后来欧勒称之为转动惯量的量。转动惯量是表征刚体转动惯性大小的物理量,它与刚体的质量、质量相对于转轴的分布有关。本实验将学习测量刚体转动惯量的基本方法。
实验目的
1.用实验方法验证刚体转动定律,并求其转动惯量;
2.观察刚体的转动惯量与质量分布的关系
3.学习作图的曲线改直法,并由作图法处理实验数据.
实验原理
1.刚体的转动定律
具有确定转轴的刚体,在外力矩的作用下,将获得角加速度β,其值与外力矩成正比,与刚体的转动惯量成反比,即有刚体的转动定律:
M = Iβ (1)
利用转动定律,通过实验的方法,可求得难以用计算方法得到的转动惯量。
2.应用转动定律求转动惯量

如图所示,待测刚体由塔轮,伸杆及杆上的配重物组成。刚体将在砝码的拖动下绕竖直轴转动。设细线不可伸长,砝码受到重力和细线的张力作用,从静止开始以加速度a下落,其运动方程为mg –T=ma,在t时间内下落的高度为h=at2/2。刚体受到张力的力矩为Tr和轴摩擦力力矩Mf。由转动定律可得到刚体的转动运动方程:Tr - Mf = Iβ。绳与塔轮间无相对滑动时有a = rβ,上述四个方程得到:
m(g - a)r - Mf = 2hI/rt2 (2)
Mf与张力矩相比可以忽略,砝码质量m比刚体的质量小的多时有a<<g,
所以可得到近似表达式:
mgr = 2hI/ rt2 (3)
式中r、h、t可直接测量到,m是试验中任意选定的。因此可根据(3)用实验的方法求得转动惯量I。
3.验证转动定律,求转动惯量
从(3)出发,考虑用以下两种方法:
A.作m – 1/t2图法:伸杆上配重物位置不变,即选定一个刚体,取固定力臂r和砝码下落高度h,(3)式变为:
M = K1/ t2 (4)
式中K1 = 2hI/ gr2为常量。上式表明:所用砝码的质量与下落时间t的平方成反比。实验中选用一系列的砝码质量,可测得一组m与1/t2的数据,将其在直角坐标系上作图,应是直线。即若所作的图是直线,便验证了转动定律。
从m – 1/t2图中测得斜率K1,并用已知的h、r、g值,由K1 = 2hI/ gr2求得刚体的I。
B.作r – 1/t图法:配重物的位置不变,即选定一个刚体,取砝码m和下落高度h为固定值。将式(3)写为:
r = K2/ t (5)
式中K2 = (2hI/ mg)1/2是常量。上式表明r与1/t成正比关系。实验中换用不同的塔轮半径r,测得同一质量的砝码下落时间t,用所得一组数据作r-1/t图,应是直线。即若所作图是直线,便验证了转动定律。
从r-1/t图上测得斜率,并用已知的m、h、g值,由K2 = (2hI/ mg)1/2求出刚体的I。
实验仪器
刚体转动仪,滑轮,秒表,砝码
刚体转动仪包括:
A.塔轮,由五个不同半径的圆盘组成。上面绕有挂小砝码的细线,由它对刚体施加外力矩。
B.对称形的细长伸杆,上有圆柱形配重物,调节其在杆上位置即可改变转动惯量。与A和配重物构成一个刚体。
C.底座调节螺钉,用于调节底座水平,使转动轴垂直于水平面。
此外还有转向定滑轮,起始点标志,滑轮高度调节螺钉等部分。
实验内容
1. 调节实验装置:调节转轴垂直于水平面
调节滑轮高度,使拉线与塔轮轴垂直,并与滑轮面共面。选定砝码下落起点到 地面的高度h,并保持不变。
2. 观察刚体质量分布对转动惯量的影响
取塔轮半径为3.00cm,砝码质量为20g,保持高度h不变,将配重物逐次取三种不同的位置,分别测量砝码下落的时间,分析下落时间与转动惯量的关系。本项实验只作定性说明,不作数据计算。
3. 测量质量与下落时间关系:
测量的基本内容是:更换不同质量的砝码,测量其下落时间t。
用游标卡尺测量塔轮半径,用钢尺测量高度,砝码质量按已给定数为每个5.0g;用秒表记录下落时间。
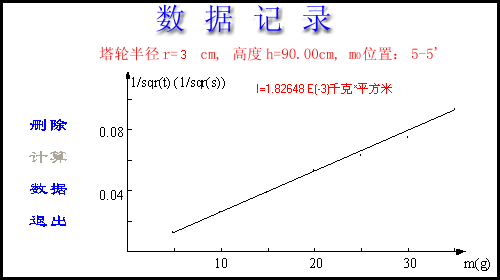
将两个配重物放在横杆上固定位置,选用塔轮半径为某一固定值。将拉线平行缠绕在轮上。逐次选用不同质量的砝码,用秒表分别测量砝码从静止状态开始下落到达地面的时间。对每种质量的砝码,测量三次下落时间,取平均值。砝码质量从5g开始,每次增加5g,直到35g止。
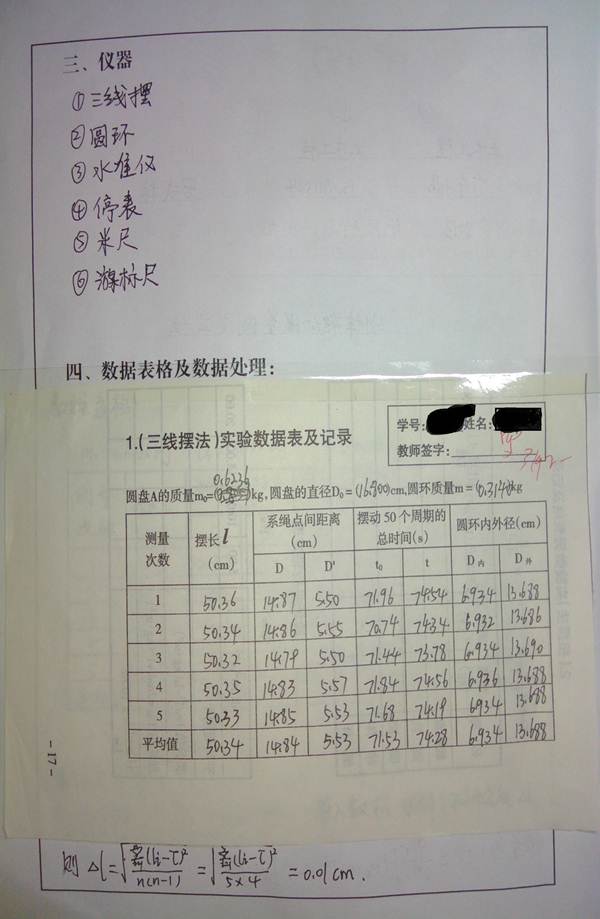
数据记录如下:

用所测数据作图,从图中求出直线的斜率,从而计算转动惯量,得I=1.82648e^-3 kg*m^2。
4.测量半径与下落时间关系
测量的基本内容是:对同一质量的砝码,更换不同的塔轮半径,测量不同的下落时间。
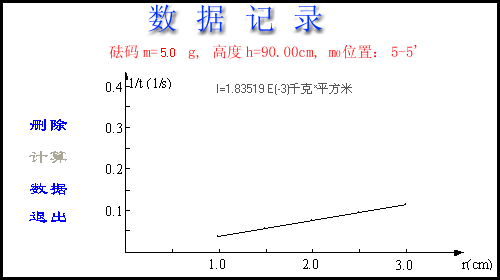
将两个配重物选在横杆上固定位置,用固定质量砝码施力,逐次选用不同的塔轮半径,测砝码落地所用时间。对每一塔轮半径,测三次砝码落地之间,取其平均值。注意,在更换半径是要相应的调节滑轮高度,并使绕过滑轮的拉线与塔轮平面共面。
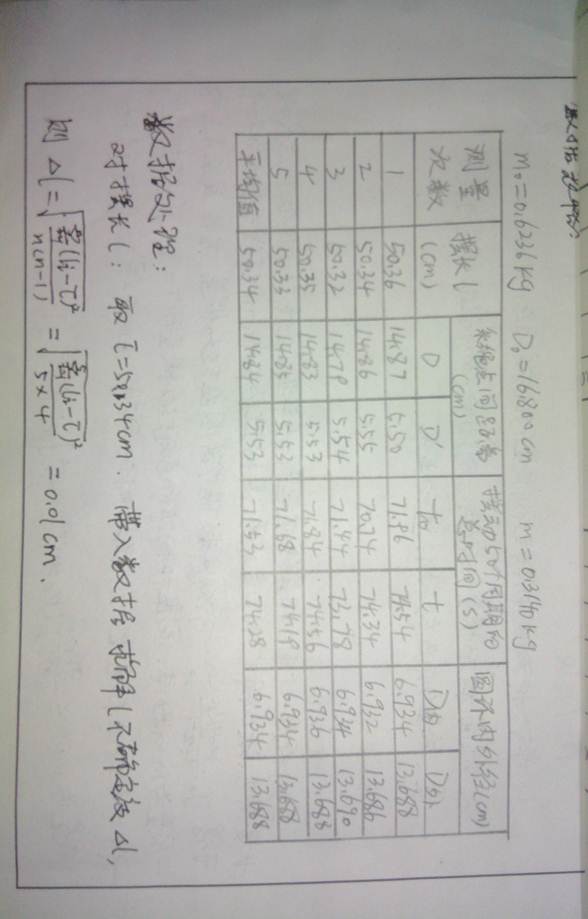
数据记录如下:
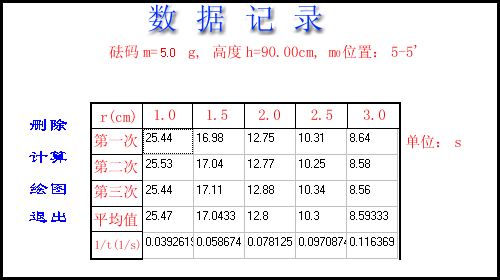
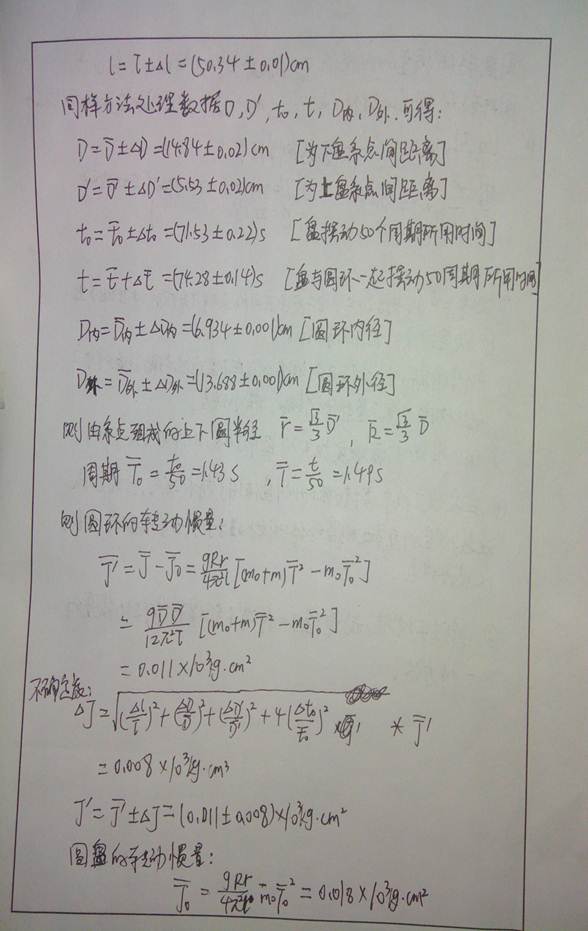
由测得的数据作图,从图上求出斜率,并计算转动惯量,得I=1.83519e^-3 kg*m^2。
实验结论
1. 观察刚体质量分布对转动惯量的影响
在砝码的质量和高度不变的情况下,随着重物离转轴的距离越来越近,下落的时间也越来越短。由I= mgr2 t2 /(2h)知,重物的转动惯量也I越来越小。由此可以得出结论:物体的转动惯量与质量分布有关,质量分布越集中,其转动惯量就越小。
2. 测量质量与下落时间关系
由m – 1/t2图的斜率求出重物的转动惯量为I=1.82648e^-3 kg*m^2。从图中可以看出,大部分点与直线比较吻合,只有第五,六个数据有点偏小。因为该实验是仿真实验,所以应该考虑进去了系统误差和随机误差。因此,这两点的偏差可能是由于砝码加重后,下落时间变短,导致计时产生的随机误差对其影响增大,即相对误差增大,造成了这两点的波动。另外可能是砝码加重后,导致下落的加速度a太大,破坏了a<<g的条件,造成系统误差。
3. 测量半径与下落时间关系
由r – 1/t图的斜率求出重物的转动惯量为I=1.83519e^-3 kg*m^2。实验测得的数据虽然比较少,但它们几乎都落在同一条直线上,因此在一定程度上已经足以说明问题。该实验的主要误差仍然来自t,但每次实验前的调节平衡也在一定程度上增大了随机误差。
4. 综合分析
从原理上看,作m – 1/t2图法和作r – 1/t图法 本质上都是由公式I= mgr2 t2 /(2h)变形得到的,它们的主要误差来源都是t。但是 r – 1/t图法 降低了t的方次,因此在一定程度上减小了斜率K的相对误差。并且m – 1/t2图法中,随着m质量的增大,会导致系统误差增大。然而,r – 1/t图法 每次实验前的调节平衡操作又增大了随机误差,也导致实验过程变得有点繁琐。因此,实验原理,计算方法上分析,r – 1/t图法更优。但综合来看,这两个方法各有其优劣,都是求转动惯量I的不错方法。
思考题
1. 由实验数据所作的m-(1/t)2图中,如何解释在m轴上存在截距?
答:该实验是仿真实验,实际中对实验有影响的因素应该都考虑进去了,由
m(g - a)r - Mf = 2hI/rt2
知,轴摩擦力力矩Mf将平衡一部分由砝码产生的张力的力矩。因此,即使静止了,仍有 mgr= Mf , 从而导致在m轴上存在截距。
-
大学物理实验报告 测量刚体的转动惯量
测量刚体的转动惯量实验目的1用实验方法验证刚体转动定律并求其转动惯量2观察刚体的转动惯量与质量分布的关系3学习作图的曲线改直法并由…
- 中南大学刚体转动惯量实验实验报告
-
刚体转动惯量的测定实验报告
刚体转动惯量的测定物本1001班张胜东20xx09110024李春雷20xx09110059郑云婌20xx091100195刚体转…
-
刚体转动惯量的测定_实验报告
实验三刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度它与刚体的质量形状大小和转轴的位置有关形状简单的刚体可以通过数学计算求得…
-
转动惯量的实验分析报告
转动惯量的测量实验分析报告一数据处理1用游标卡尺米尺天平分别测出待测物体的质量和必要的几何尺寸如塑料圆柱的直径金属圆筒的内外径木球…
-
《用三线摆法测定物体的转动惯量》的示范报告
用三线摆法测定物体的转动惯量的示范报告竺江峰20xx年3月18日一教学目的1学会用三线摆测定物体圆环的转动惯量2学会用累积放大法测…
-
转动惯量的实验分析报告
转动惯量的测量实验分析报告一数据处理1用游标卡尺米尺天平分别测出待测物体的质量和必要的几何尺寸如塑料圆柱的直径金属圆筒的内外径木球…
-
刚体转动惯量的测定实验报告
刚体转动惯量的测定物本1001班张胜东20xx09110024李春雷20xx09110059郑云婌20xx091100195刚体转…
-
大学物理实验报告 测量刚体的转动惯量
测量刚体的转动惯量实验目的1用实验方法验证刚体转动定律并求其转动惯量2观察刚体的转动惯量与质量分布的关系3学习作图的曲线改直法并由…
-
转动惯量实验报告模板
实验二刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度它取决于刚体的总质量质量分布形状大小和转轴位置对于形状简单质量均匀分布的…
-
物理模拟实验转动惯量报告
仿真物理实验实验报告电信学院自动化35蔡启阳213050410520xx年5月29日星期四实验名称物体转动惯量研究实验原理1刚体的…