PASCO物理实验报告(基础实验三质点转动惯量)
PASCO物理实验报告(基础实验三)
学号: 姓名:
实验名称: 质点的转动惯量
一、实验目的:
这个实验的目的是找到质点的转动惯量的实验值,并验证这些值与相应的计算出的理论值的差别。
二、实验仪器:
灵敏滑轮,砝码和挂钩,转动平台,质点(金属块),“A”形底座,电子天平,灵敏滑轮光门,电脑。
三、实验原理
理论上,质点的转动惯量为
I=MR2, (1)
式(1)中M是质量,R是质点离转轴的距离。
为了从实验上确定转动惯量,施加一个已知的力在物体上,测量产生的角加速度。因为:
 , 或
, 或  (2)
(2)
这里 是角加速度,它等于
是角加速度,它等于 ,
, 是绳子上挂着的物体产生得力矩,是整个装置转动的基础。力矩表达式为:
是绳子上挂着的物体产生得力矩,是整个装置转动的基础。力矩表达式为:
 (3)
(3)
这里 r是绳子所绕的圆柱的半径,T是装置转动时绳子的张力。
对悬挂的物体m应用牛顿第二定律
 (4)
(4)
由(6-3-4)得绳子张力为:
 (5)
(5)
因此知道物体m的线加速度,就可得到力矩和角加速度,计算出质点的转动惯量。
五、实验操作
1.方形质点放在转动平台的导轨上任意半径处。
2.把灵敏滑轮及支架装在A形底座上,用绳子把它连在轴上,再接着连到计算机上。
3.把灵敏滑轮光门装在底座上,调节光门的位置使它能够跨在中心转轴的滑轮上方,并连到计算机上去。
4.运行灵敏滑轮记时程序。
【实验数据记录】
1.测量质点的转动惯量理论值
(1)用电子天平称出方形质点质量M, 并记在表6-1中。
(2)测量转轴到质心的距离并记到表6-1中。
表6-1 质点转动惯量数据记录表

2.实验方法测量转动惯量
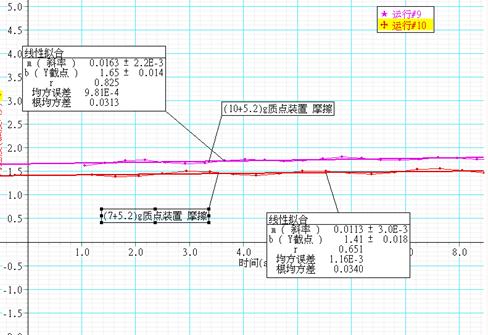
1)考虑摩擦
理论上求转动惯量的实验中不包括摩擦力,在实验中要补偿摩擦力,则需找出绳子末端应加放质量为多少的物块来克服动摩擦,并使物块匀速下落。这个“摩擦质量” 将被从用于加速装置的总质量中减去。为了找到克服动摩擦所需的质量,把小质量的物体吊在滑轮的线上,运行灵敏滑轮记时程序,把线绕在中心轴的滑轮上,把线放在灵敏滑轮上,点击“REC”,让物体从桌上落到地上,在物体落地之前点击“Stop”,在位移-时间的图中,斜率为常数,即物体是匀速下落的。
质点与装置:
只有质点:
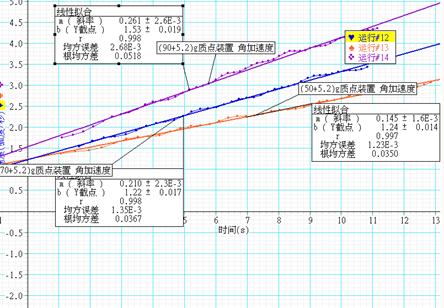
2)确定质点和装置的加速度:
第一步:为了找到加速度,把大约50g的物体放在滑轮上,运行灵敏滑轮记时程序,把线绕在中心轴的滑轮上,点击“REC”,让物体从桌上落到地上,在物体落地之前点击“Stop” 。
第二步:作出速度-时间关系曲线图,图上显示的斜率就是加速度。
表6-2 质点转动惯量数据表

3)测量半径
用测径器测量绳子所绕的圆柱的直径,记算出半径。把半径记在表6-2中。
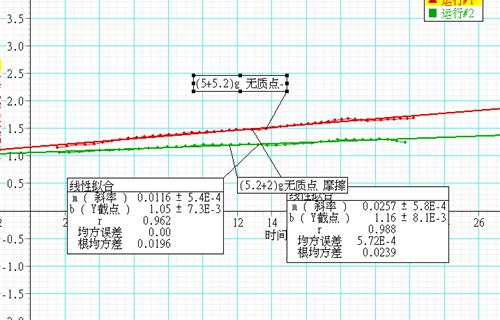
4)实验测量只有装置时的加速度:
因为在测量装置和质点的加速度中,装置和质点一起转动,必须确定装置本身的加速度和转动惯量,从总的转动惯量中减去装置的转动惯量就得到质点的转动惯量。为此,把质点从转动装置中拿走,只有装置时重复实验 “确定装置和质点的加速度”的步骤 。
注意:这只需更少的摩擦质量克服动摩擦力,在“确定装置和质点的加速度”的步骤中仅需放20g的质量在滑轮上。把数据记在表6-2中。
【实验数据处理】
把以下计算的结果记在表6-3中。
1. 从用于加速装置的悬挂物体中减去摩擦质量,把所得到的质量用于方程中。
2. 计算装置和质点在一起的转动惯量的实验值。
3. 计算只有装置时的转动惯量。
4.从装置和质点的总转动惯量中减去装置的转动惯量就得到质点的转动惯量。
表6-3

【实验数据分析】
分析实验值和理论值的相对误差。
1. 测量摩擦质,绳子缠绕圆柱时选择的半径不是最合适的,造成绳子与滑轮的凹槽有一定角度,观看物体做匀速运动时会产生误差。
2. 进行数据处理时,计算由于四舍五入会产生误差。
3. 游标卡尺读数时会产生误差。
4. 仪器本身存在一定的误差。
5. 平衡摩擦力不够。
只有装置时的角加速度图象:
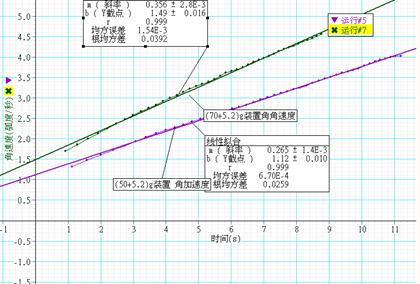
装置和质点一起的角加速度图像:
第二篇:《大学物理实验》2-05实验五 转动惯量的测定
实验五 转动惯量的测量
转动惯量是描述刚体转动中惯性大小的量度,它与刚体的质量分布及转轴位置有关。对于形状简单、质量分布均匀的物体,可以计算其定轴转动的转动惯量;但对于形状复杂、质量分布不均匀的刚体,其计算就非常困难,往往需要用实验的方法测定。例如:机械零部件、电机转子以及枪炮的弹丸等等。本实验采用三线扭摆法,通过扭转运动测量刚体的转动惯量,是常用的测量方法之一。其他的实验方法还有复摆法、扭摆法。
一、实验目的
1、学习用三线摆法测量物体的转动惯量;
2、理解转动惯量与质量分布的关系;
3、验证转动惯量的平行轴定理;
4、学习用激光光电传感器精确测量三线摆扭转运动的周期。
二、实验原理
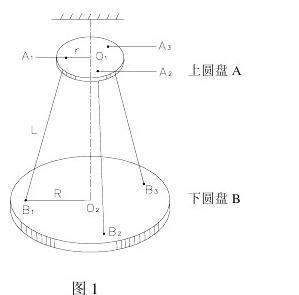
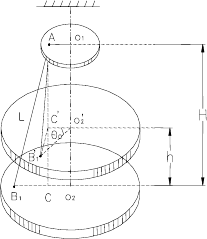
三线摆是将一个匀质圆盘,以等长的三条
细线对称地悬挂在一个水平的小圆盘下面构成
的。每个圆盘的三个悬点均构成一个等边三角
形。如图1所示,当底圆盘B调成水平,三线
等长时,B盘可以绕垂直于它并通过两盘中心
扭转的周期与下圆盘的轴线O1O2作扭转摆动,
(包括其上物体)的转动惯量有关,三线摆法正
是通过测量它的扭转周期来间接测量已知质量
物体的转动惯量。
由实验附1的推导可知,当摆角很小,三
悬线很长且等长,悬线张力相等,上下圆盘平
行,且只绕O1O2轴扭转的条件下,
下圆盘B对O1O2轴的转动惯量J0为: J0=m0gRr2T0 (1) 24πH
此为下圆盘B对O1O2轴的转动惯量。式中m0为下圆盘B的质量,r和R分别为上圆盘A和下圆盘B上线的悬点到各自圆心O1和O2的距离(注意r和R不是圆盘的半径),H为两盘之间的垂直距离,T0为下圆盘扭转的周期。
76
若测量质量为m的待测物体对于O1O2轴的转动惯量J,只须将待测物体置于圆盘上,设此时扭转周期为T,对于O1O2轴的转动惯量为:
J1=J+J0=(m+m0)gRr
4πH2T2 (2)
于是得到待测物体对于O1O2轴的转动惯量为:
J=(m+m0)gRr
4πH2T2?J0 (3)
上式表明,各物体对同一转轴的转动惯量具有相叠加的关系,这是三线摆方法的优点。为了将测量值和理论值比较,安置待测物体时,要使其质心恰好
和下圆盘B的轴心重合。
本实验还可验证平行轴定理。如把一个已知质量的圆柱体放
在下圆盘中心,质心在O1O2轴,测得其转动惯量为J3;然后把
用两个完全相同的圆柱其质心移动距离d,为了不使下圆盘倾翻,
体对称地放在圆盘上,如图2所示。设两圆柱体质心离开O1O2
轴距离均为d(即两圆柱体的质心间距为2d)时,其对于O1O2轴
的转动惯量为J4。设一个圆柱体质量为m,则由平行轴定理可得:
图2
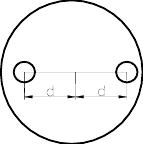
J4=md2+J3 (4) 2
将由上式计算得到的J4值与用实验实测所得的值进行比较,若在实验误差允许范围内两者相符的话,则转动惯量的平行轴定理就得到了验证。
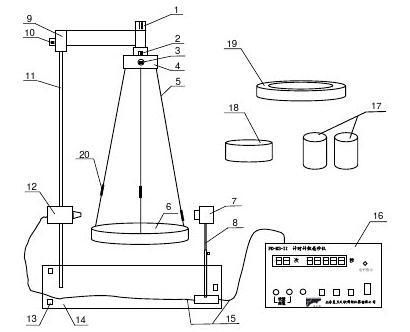
三、仪器与用具
新型转动惯量测定仪平台(见图3)、米尺、游标卡尺、计数计时仪、水平仪,样品为圆盘、圆环及圆柱体3种。
计数计时仪使用说明
(一)原理
此仪器内设单片机,具有计时和计数功能。设置计数数值后,计数计时仪每接收到一个下降沿信号就计数一次,直至使用者设定的值。这时可从计时显示中读取发生触发信号所用的时间,例如:弹簧振动的周期、三线摆的摆动周期等。
(二)使用步骤
1、将主机后面板的航空插座与操作平台上的光电接收器上的航空插头相连接。仪器上的接线柱仅备用,+5V也可作电源(5V,0.5A),GND是接地,IN是触发信号输入端,可与传感器输出端相连。
2、打开电源,预置计数值,此时计数显示屏上将显示设定值,仪器处于等待状态, 77
仪器右上角的低电平指示灯为暗状态,(使用在激光光电传感器上时,等待状态为暗,每接收到一个触发信号,低平指示灯就亮一次;用在其它传感器上时,此灯等待状态为亮,接收到一个触发信号,低平指示灯就暗一次。)接收到触发信号后,计数计时仪开始计时。
图3 转动惯量测定仪总图
1-启动盘锁紧螺母 2-摆线调节锁紧螺栓 3-摆线调节旋钮 4-启动盘 5-摆线(其中一根
线挡光计时) 6-悬盘 7-光电接收器 8-接收器支架 9-悬臂 10-悬臂锁紧螺栓
11-支杆 12-半导体激光器 13-调节脚 14-底板 15-连接线 16-计数计时仪 17-小圆柱样品
18-圆盘样品 19-圆环样品20-挡光标记
3、当计数至设定值后,可读出所用时间。这时再按“设定/阅览”键,转换为阅览功能,可阅览每次触发间隔的时间值。
(三)用途
本计时计数仪可用于单摆、气垫导轨、测量马达转速、产品计数等与计时有关的实验。
四、实验内容和步骤
1、调节三线摆
(1)调节上圆盘(启动盘)水平。将圆形水平仪放到旋臂上,调节底板调节脚,使其水平。
(2)调节下圆盘水平。将水平仪放至圆盘中心,调节摆线锁紧螺栓和摆线调节旋钮,使下圆盘水平。
2、调节激光器和计时仪
78
(1)先将光电接收器放到一个适当位置,后调节激光器位置,使其和光电接收器在一个水平线上。此时可打开电源,将激光束调整到最佳位置,即激光打到光电接收器的小孔上,计数计时仪右上角的低电平指示灯状态为暗。(注意此时
切勿直视激光光源)
(2)再调整启动盘,使一根摆线靠近激光束。(此时也可轻轻
旋转启动盘,使其在5度角内转动起来)
(3)设置计时仪的预置次数。(具体操作步骤见仪器介绍说明)
3、测量下圆盘的转动惯量J0
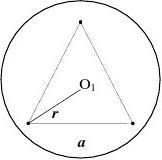
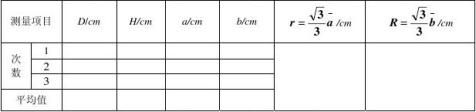
(1)用游标卡尺测量上圆盘悬点间间距a(见图4)和下圆盘
悬点间间距b,由此可根据三角形关系计算出上下盘悬点到盘心
的距离r和R,用游标卡尺测量圆盘的直径D1。
(2)用米尺测量上下圆盘之间的距离H。
(3)记录下圆盘的质量M0 。
(4)测量下圆盘摆动周期T0,轻轻旋转启动上圆盘,使下圆盘作扭转摆动(摆角<
5o),记录20个周期的时间。
4、测量下圆盘加圆环的转动惯量J1
(1)在下圆盘上放上圆环并使它的中心对准圆盘中心。
(2)测量下圆盘加圆环的扭转摆动周期T1。
(3)测量并记录圆环质量M1,圆环的内、外直径D内和D外。
5、测量下圆盘加圆盘的转动惯量J2
(1)在下圆盘上放上待测圆盘并使它的中心对准圆盘中心。
(2)测量下圆盘和待测圆盘的扭转摆动周期T2。
(3)测量并记录待测圆盘质量M2,直径D盘。
5、测量下圆盘加圆柱的转动惯量J3
(1)在下圆盘上放上待测圆柱并使它的中心对准圆盘中心。
(2)测量下圆盘和待测圆柱的扭转摆动周期T3。
(3)测量并记录待测圆柱质量M3,直径D柱。
6、验证平行轴定理
(1)将两个相同的圆柱体按照下圆盘上的刻线,对称的放在下圆盘上,相距一定的距离2d=D槽-D小柱 。
(2)测量扭转摆动周期T4。
(3)测量圆柱体的直径D小柱,下圆盘上刻线直径D槽 。 图4
79
五、数据记录与处理
1.数据记录
表一 各周期的测定
测 量 项 目
悬 盘 质 量 M0=
圆 环 质 量M1=
圆盘质量 M2=
圆柱体质量 M3=
2圆柱体
摆动周期数n1
20 周期时间
2 3 4 5
平均值 t/s 平均周期Ti=t/n
?
t/s
表二 上、下圆盘几何参数及其间距
表三 圆环、圆盘、圆柱体几何参数(单位cm)
测量项目
D内 D外
D盘
D小柱
D槽 2d=D槽-D小柱
次 数
平 均 值
80
2.计算各转动惯量值与理论计算转动惯量值,并进行误差分析。
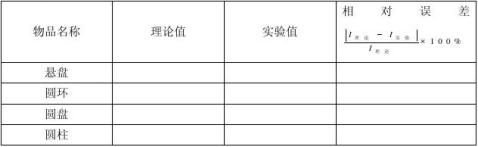
悬盘转动惯量计算式:J0=
m0gRr2
T0 4π2H(m+m0)gRr4π2H
T2?J0
待测物转动惯量计算式:J=
圆盘(或圆柱体) 转动惯量 理论计算式: J=圆环理论转动惯量计算式:J=
1
mD2 8
122mD内+D外 8
()
3.验证平行轴定理。
将两个直径为D的圆柱体放置在悬盘上,使它们的间距为2d,如图2所示,d为圆柱体中心轴线与转轴间距离,两圆柱体中心连线通过转轴。测得J4和J3 ,看在误差允许范围内是否满足(4)式。
六、注意事项
1、切勿直视激光光源或将激光束直射人眼。
2、做完实验后,要把样品放好,不要划伤表面,以免影响以后的实验。 3、移动接收器时,请不要直接搬上面的支杆,要拿住下面的小盒子移动。 4、启动盘及悬盘上各有平均分布的三只小孔,实验时用于测量两悬点间距离。 七、思考与问答
1、试分析式J0=轴重合?
m0gRr4πH
2
实验中应如何保证待测物转轴始终和O1O2T02成立的条件。
2、将待测物体放到下圆盘(中心一致)测量转动惯量,其周期T一定比只有下圆盘时大吗?为什么?
3、如何利用三线摆测定任意形状物体绕特定轴的转动惯量?
81
附1公式(1)的推导
设下圆盘的质量为m0 ,以小角度作扭转振动时,它沿O1O2轴线上升的高度为h,如图5所示,则势能为
Ep=m0gh (1)
当圆盘回转到平衡位置时,它具有的动能为:
Ek=12J0ω0 (5) 2
式中J0为下圆盘对于通过其质心且垂直于盘面的O1O2轴
略去摩的转动惯量,ω0为圆盘回到平衡位置时的角速度,
擦力,根据机械能守恒定律得 12J0ω0=m0gh (6) 2
把下圆盘小角度扭转振动作为简谐振动,则圆盘的角位移图5 2 图θ与时间t的关系为
θ=θ0sin2πt (7) T0
式中θ是圆盘在时间t的角位移,θ0是角振幅,T0是一个完全振动的周期,振动的初相位认为是0。则角速度为 ω=
在通过平衡位置时,ω0=2πdθ2π=θ0cost (8) dtT0T02πθ0 ,于是 T0
21?2π?J0?θ0?=m0gh (9) ??2?T0?
设悬线长度A1B1=L,上下圆盘悬点到中心的距离分别为r和R。当角振幅为θ0时,下圆盘轴向上移高度
AC2?AC'2
h=O2O=AC?AC= (10) 'AC+AC'
2'
由于
2AC2=AB2?BC2=L2?(R?r),
82
AC′2=AB′2?B′C′2=L2?R2+r2?2Rrcosθ0
所以
2Rr(1?cosθ0)4Rrsin2(θ0/2) (11) h==H+H?h2H?h()
由于θ0很小,sin2θ012≈θ0,h<<2H ,则得 24
2Rrθ0h= (11) 2H
代入(7)式并经整理,得到表达式为 Jm0gRr
0=4π2HT2
此即(1)式。
83(11)
-
转动惯量实验报告模板
实验二刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度它取决于刚体的总质量质量分布形状大小和转轴位置对于形状简单质量均匀分布的…
-
大学物理实验报告 测量刚体的转动惯量
测量刚体的转动惯量实验目的1用实验方法验证刚体转动定律并求其转动惯量2观察刚体的转动惯量与质量分布的关系3学习作图的曲线改直法并由…
- 物体转动惯量的测定--实验报告-131006231-张利鹏
-
物理实验报告2_刚体转动惯量的测定
实验名称刚体转动惯量的测定实验目的a掌握使用转动惯量仪检验刚体的转动定律b学会测定圆盘的转动惯量和摩擦力矩c学习一种处理实验数据的…
-
刚体转动惯量的测定实验报告
刚体转动惯量的测定物本1001班张胜东20xx09110024李春雷20xx09110059郑云婌20xx091100195刚体转…
-
大学物理实验之用三线摆测物体的转动惯量
大学物理实验之用三线摆测物体的转动惯量1了解三线摆原理并以此测物体的转动惯量2掌握秒表游标卡尺等测量工具的使用方法掌握测周期的方法…
-
实验4 用三线摆测刚体的转动惯量
实验4用三线摆测刚体的转动惯量教学目的1在实验中加深对转动惯量概念的理解2学会用三线摆测刚体的转动惯量3验证转动惯量的平行轴定律教…
-
刚体转动惯量的测定实验报告
刚体转动惯量的测定物本1001班张胜东20xx09110024李春雷20xx09110059郑云婌20xx091100195刚体转…
-
大学物理实验报告 测量刚体的转动惯量
测量刚体的转动惯量实验目的1用实验方法验证刚体转动定律并求其转动惯量2观察刚体的转动惯量与质量分布的关系3学习作图的曲线改直法并由…
-
转动惯量实验报告模板
实验二刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度它取决于刚体的总质量质量分布形状大小和转轴位置对于形状简单质量均匀分布的…
-
实验11用三线摆测物体的转动惯量
实验11用三线摆测物体的转动惯量实验目的1学会用三线摆测物体的转动惯量2验证转动惯量的平行轴定理实验仪器三线摆FDIMII型计时计…