PLC可编程控制实训报告模板
可编程控制器综合应用实训报告要求
可编程控制器综合应用实训要求在完成分工的程序设计并调试成功后写出实训的报告,报告要求1200字以上,内容包括:
1、 设计任务(按照每个同学的分工);
2、 设计方案,根据设计任务制定控制的方案;
3、 设计过程,根据设计方案画出控制流程图;
4、 程序调试、修改,根据调试中发现的问题,进行修改,完成设计;
5、 小结。
第一页放你做的实验题目
群共享里有名单和题目
第一组就做第一个项目,以此类推
请根据自己的分组完成报告
名单中每组黑色加粗为组长
是每组的总负责人
最后自己根据所填内容调整文档
保持美观
上海开放大学
《可编程控制器实训》
综合应用实训任务书
姓名
学号
专业
校区 浦东南校
20##年 12月 1 日
项目三(加料机械手单元):机械手的旋转底座具有三个方向,分别是上料、加工、下料,每个方向相差90度。根据项目四旋转工作台的工艺要求,机械手的工作方式有启动阶段、工作阶段、结束阶段3种模式。分别完成装零件、取零件后再装入和取零件的工作过程。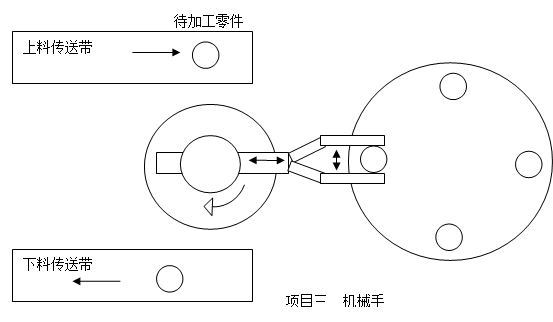
机械手的工作步骤,以典型的加工阶段为例,工作过程为:上料传送带上检测到有零件后,若旋转工作台发出加工完成信号,机械手定位在加工工位:
1. 旋转到加工工位,机械手伸出,手臂下降,夹紧已加工的零件,手臂上升,机械手缩回;
2. 旋转到下料工位,机械手伸出,手臂下降,放松已加工的零件,手臂上升,机械手缩回;
3. 旋转到上料工位,机械手伸出,手臂下降,夹紧未加工的零件,手臂上升,机械手缩回;
4. 旋转到加工工位,机械手伸出,手臂下降,放松未加工的零件,手臂上升,机械手缩回。
若在启动工作阶段,对开始的1~4个零件,只有装料要求,机械手定位在上料工位:
1. 旋转到上料工位,机械手伸出,手臂下降,夹紧未加工的零件,手臂上升,机械手缩回;
2. 旋转到加工工位,机械手伸出,手臂下降,放松未加工的零件,手臂上升,机械手缩回。
若在结束工作阶段,对最后的4个零件,只有卸料要求,机械手定位在加工工位:
1. 旋转到加工工位,机械手伸出,手臂下降,夹紧已加工的零件,手臂上升,机械手缩回;
2. 旋转到下料工位,机械手伸出,手臂下降,放松已加工的零件,手臂上升,机械手缩回;
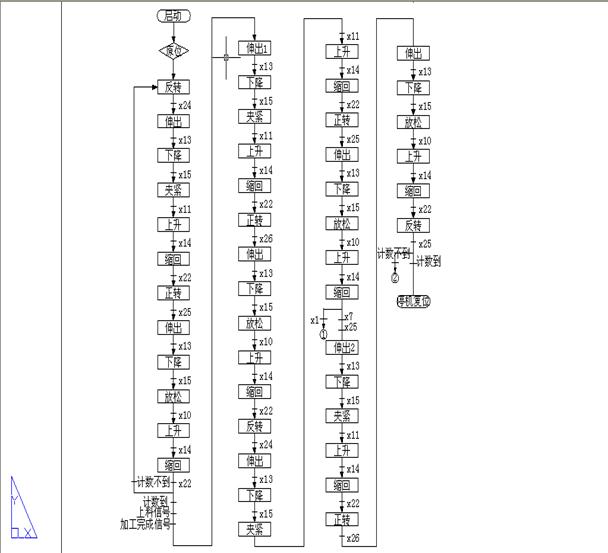
机械手的控制方案一是全部采用行程开关,该方案的特点是简单,但控制精度不高。以启动工作阶段为例,按PLC实验箱上编程端口分配:启动(X6)--旋转到上料工位(Y1)--(X24)--机械手伸出(Y13)--(X13)--手臂下降(Y15)--(X15)--夹紧未加工的零件(Y11)--(X11)--手臂上升(Y14)-- (X14)-- 机械手缩回(Y12)--(X22)--旋转到加工工位(Y0)—(X25)-- 机械手伸出(Y13)--(X13)--手臂下降(Y15)--(X15)--放松未加工的零件(Y10)--(X10)--手臂上升(Y14)--(X14)-- 机械手缩回(Y12)--(X22)--完成一次零件安装。
一、设计任务

二、设计方案
三、设计过程
四、程序调试及修改

五、小结

第二篇:电气控制与PLC实训报告
电气控制与PLC实训报告
系(部):电子信息工程
专业班级:电子091班
学生姓名:刘欢
学 号:22
指导教师:胡继明
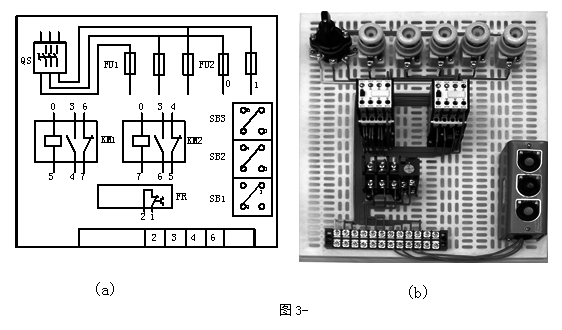
电动机控制线路的连接
一、实训目的
1、了解交流接触器、热继电器、按钮的结构及其在控制电路中的应用。
2、识读简单电气控制线路图,并能分析其动作原理。
3、掌握电气控制线路图的装接方法。
二、实训器材
1、交流接触器、热继电器
2、常闭按钮、常开按钮
3、熔断器
4、三相异步电动机
5、导线
三.实训原理(含原理图)
三相笼型异步电动机的全压起动
对于小容量笼型异步电动机或变压器容量允许的情况下,笼型电动机可采用全压直接起动。
四.实验内容与步骤
(一)、单向运行控制线路
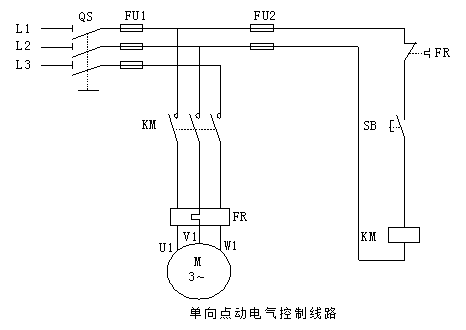
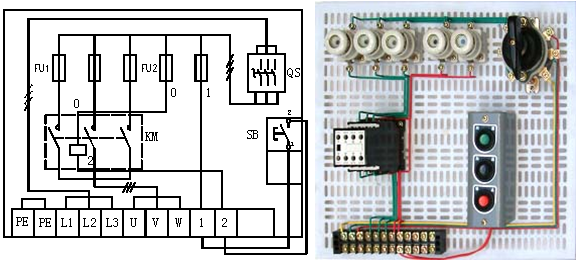
1、单向点动控制线路
电动机的单向点动控制线路如图所示。当电动机需要单向点动控制时,先合上电源开关QS,然后按下起动按钮SB,接触器KM线圈获电吸合,KM常开主触头闭合,电动机M起动运转。当松开按钮SB时,接触器KM线圈断电释放,KM常开主触头断开,电动机M断电停转。
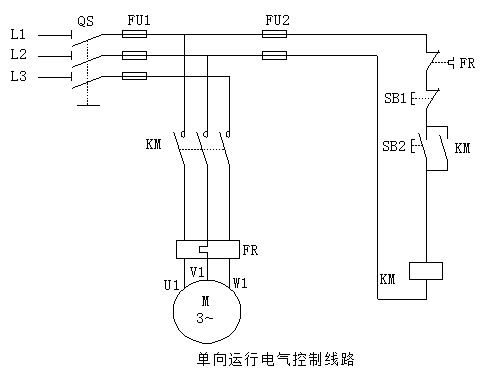
2、单向长动运行控制线路
电动机的单向长动控制线路如图所示。合上电源开关QS,按下起动按钮SB2,接触器KM线圈获电吸合,KM常开主触头闭合,电动机M起动运转。同时使与SB2并联的1副辅助常开触头闭合,这副触头叫自锁触头。松开按钮SB2,控制线路通过KM自锁触头使KM线圈仍保持获电吸合。如需要电动机停转,,只需按一下停止按钮SB1,接触器KM线圈断电释放,KM常开主触头断开,电动机M断电停转,同时KM自锁触头也断开,所以松开SB1,接触器KM线圈不再获电,需重新起动。
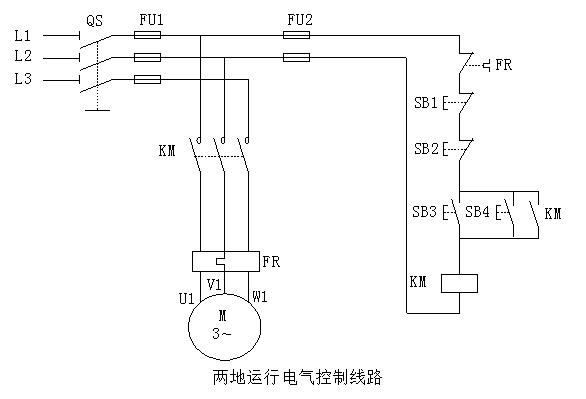
3、两地起动和两地停止控制线
电动机两地起动和两地停止控制线路如图所示。电动机若要两地起动,可按按钮SB3或SB4;若要两地停止,可按按钮SB2或SB2。
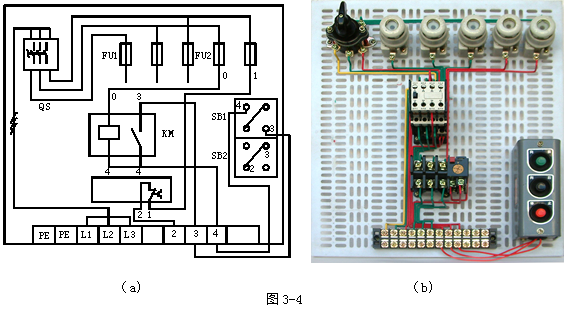
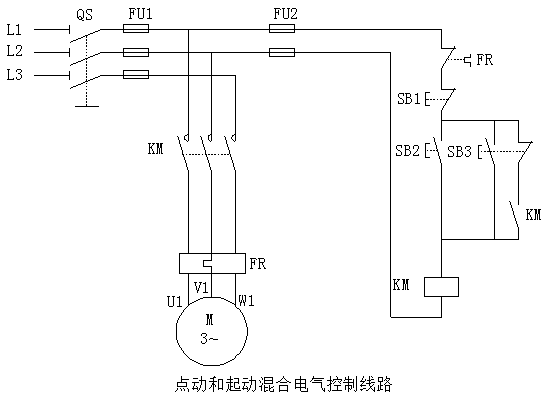
4、点动和起动混合控制线路
电动机点动和起动混合控制线路如图所示。合上电源开关QS后,按下起动按钮SB2,接触器KM线圈获电吸合并自锁,KM常开主触头闭合,电动机M起动运转。
若按下起动按钮SB3,接触器KM线圈获电吸合KM常开主触头闭合,电动机M起动运转。由于起动按钮SB3的常闭辅助触头断开接触器KM的自锁回路,所以是点动控制。
(二)、正反向运行控制线路
生产机械往往要求运动部件可以正反两个方向运行,这就要求电动机可以正反转控制。若将接至电动机三相电源进线中任意两相对调接线,即可达到反转的目的,常用的电动机正反转控制线路有以下几种:
1、接触器联锁的正反转控制线路
接触器联锁的正反转控制线路采用两个接触器,即正转的接触器KM1和反转接触器KM2。当接触器KM1三对主触头接通时,三相电源相序按L1、L2、L3接入电动机。而当KM2的三对主触头接通时,三相电源相序按L3、L2、L1接入电动机,电动机即反转。
线路要求接触器KM1和KM2不能同时通电,否则它们的主触头就会一起闭合,造成L1、L3两相短路。为此在KM1和KM2线圈各自支路中相互1副常闭辅助触头,以保证接触KM1和KM2的线圈不会同时通电。KM1和KM2的这2副常闭辅助触头在线路中所起的作用称为联锁作用,这2副常闭辅助触头叫做联锁触头。
正转控制时,按下按钮SB2,接触器KM1线圈获电吸合,KM1主触头闭合,电动机M起动正转,同时KM1的自锁触头闭合,联锁触头断开。
反转控制时,必须先按停止按钮SB1,接触器KM1线圈断电释放,KM1触头复位,电动机断电;然后按下反转按钮SB3,接触器KM2线圈获电吸合,KM2主触头闭合,电动机M起动反转,同时KM2自锁触头闭合,联锁触头断开。
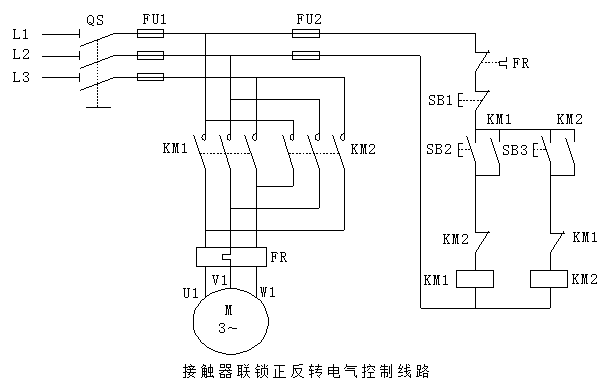
这种线路的缺点是操作不方便,因为要改变电动机的方向,必须按停止按钮SB1,再按反向按钮SB3才能使电动机反转。
2、按钮联锁的正反转控制线路
按钮联锁的正反转控制线路的动作原理与接触器联锁的正反转控制线路基本相似。但由于采用了复合按钮,当按下反转按钮SB3时,使接在正转控制线路中的SB3常开触头先断开,正转接触器KM1线圈断电,KM1主触头断开,电动机M断电;接着按钮SB3的常开触头闭合,使反转接触器KM2线圈获电,KM2主触头闭合,电动机M反起动;既保证了正、反转接触器KM1和KM2断电,又可不按停止按钮SB1而直接按反转按钮SB3进行反转起动;由反转运行改成正转运行的情况,也只要直接按正转按钮SB2即可。
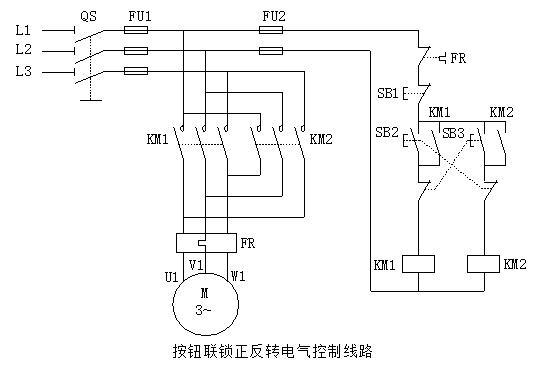
这种线路的优点是操作方便,缺点是易产生短路事故。如正转接触KM1主触头了生熔焊故障而分断不开时,若按反转按钮SB3进行换向,则会产生短路故障。
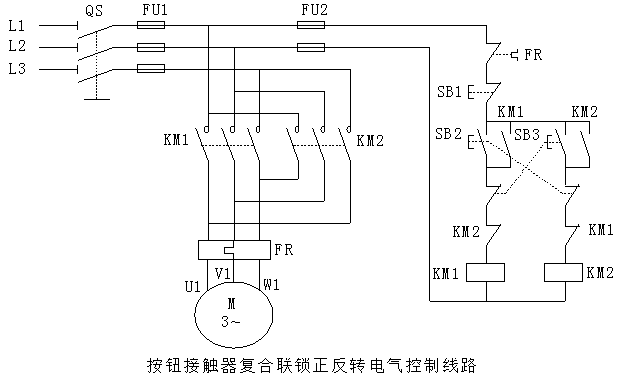
3、按钮接触器复合联锁的正反转控制线路
按钮接触器复合联锁的正反转控制线路是综合了按钮、接触器联锁两个电路的优点,既可不按停止按钮而直接按反向按钮进行反向起动,当正转接触器发生熔焊故障时又不会发生相间短路故障。
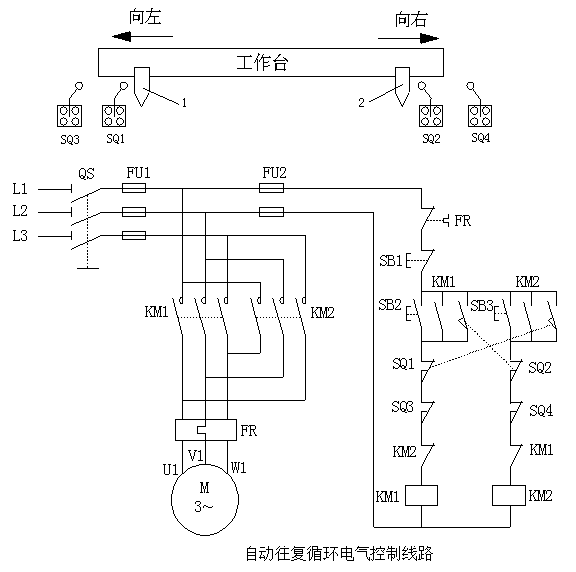
4、自动往复循环控制线路
利用生产机械运动的行程来控制其自动往返的方法叫自动往复循环控制,它是通过位置开关来实现的。
合上电源开关QS,按下起动按钮SB2,接触器KM1线圈获电吸合,KM1主触头闭合,电动机M正转起动,工作台向左移动;当工作台移到一定位置时,挡铁1碰撞位置开关SQ1,使SQ1的常闭触头断开,接触器KM1线圈断电释放,电动机M断电;与此同时位置开关SQ1常开触头闭合,接触器KM2线圈获电吸合,使电动机M反转。拖动工作台向右移动,此时位置开关SQ1虽然复位,但接触器KM2的自锁触头已闭合,故电动机M继续拖动工作台向右移动; 当工作台向右移动到一定位置时,挡铁2碰撞位置开关SQ2,使SQ2的常闭触头断开,接触器KM2线圈断电释放,电动机M断电;同时位置开关SQ2常开触头闭合,接触器KM1线圈获电吸合,使电动机M又转转,拖动工作台向左移动,如此周而复始,工作台在预定的距离内自动往复运动。
位置开关SQ3和SQ4安装在工作台往复运动的极限位置上,以防止位置开关SQ1和SQ2失灵,工作台继续运动不停止而造成事故。
注:1、按图接线,应遵循“先主后控,先串后并;从上到下,从左到右;上进下出,左进右出”的原则进行接线。
2、对主电路及控制电路进行检查。
3、经老师检查确认接线正确,然后才允许通电,观察实训结果。
三相笼型异步电动机的降压起动
大容量笼型异步电动机的起动电流很大,起动时会引起电网电压降低,使电动机转矩减小,甚至起动困难,而且还要影响同一供电网络中其他设备的正常工作,所以大容量笼型异步电动机的起动电流应即制在一定的范围内,不允许直接起动。
电动机可否直接起动,应根据起动次数、电网容量、和电动机的容量来决定。一般规定是:起动时供电母线上的电压降落不得超过额定电压的10%~15%;起动时变压器的短进过载不超过最大允许值,即电动机的最大容量不超过变压器容量的20%~30%
由于机床电动机一般都为空载起动,所以常采用降低电动机定子绕组电压的方法来减少起动电流。
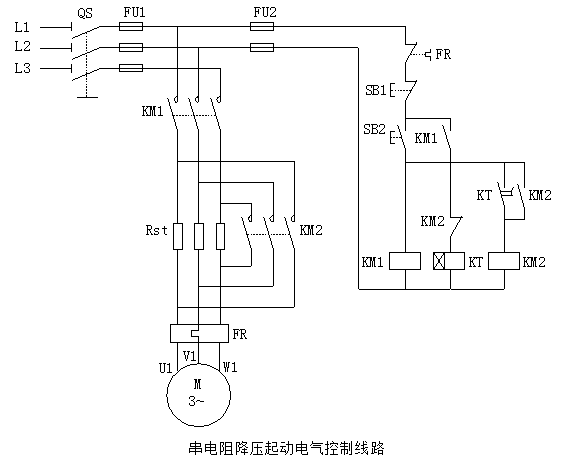
(一)、串电阻降压起动控制线路
用时间继电器控制串电阻降压起动的控制线路工作原理,当按下起动按钮SB2后,接触器KM1线圈获电吸合,KM1主触头闭合,电动机M串电阻 Rst降压起动,时间继电器KT线圈获电吸合,KT常开触头延时闭合,KM2线圈获电吸合,起动电阻Rst被短接,电动机全压运行。同时KM2的常闭触头断开,时间继电器KT线圈断电释放。
起动电阻一般采用ZX1、ZX2系列铸铁电阻。铸铁电阻功率大,能够通过较大电流,三相所串的电阻值相等。
实训中出现的问题及解决方法
1.装接电源应遵循“先主后次,从上到下。从左到右”的原则。
2.布线应注意走线工艺,要求“横平竖直”变换走线应竖直,避免交叉,多心集中并拢,严禁损伤线芯和导线绝缘。
3.电动机的整定电流必须按照电动机的额定电流进行调整。
4.电动机和按钮的金属外壳必须可靠接地。使用兆欧表一次测量电动机绕组与外壳及各绕组间的绝缘电阻值检查绝缘电阻是否符合要求。
5.实训重要文明操作,注意用电安全,需要通电时应在实训教师指导下进行。
6.用星形降压启动控制的 电动机,必须有6个出线端子,且定子绕组在三角形接法的额定电压等于三角形电源线电压。
7.接线时保证电动机三角形接法的正确性,当接触器主触头闭合时,应保证定子绕组的V1与W2,V1与V2,W1与V2相连接。
8.通电检查时,检查熔体规格和时间继电器,热继电器的各整定值是否符合要求,各个器件是否良好的接触排除安全隐患。
9.通电效验时,根据电路的控制要求独立进行实训,若出现故障,先切断电源进行检查。
-
可编程控制器实训报告
广西师范学院可编程控制器实训报告班级:09自动化学号:***20XX年6月4日20XX年6月9日实训一三相电机控制一、实训目的1、…
-
可编程控制器实验报告
浙江科技学院机械与汽车工程学院浙江科技学院实验报告控制系统实验可编程控制器题目半自动运输装置学院机械学院专业机械设计制造及其自动化…
-
可编程控制器实习报告
南京工业大学可编程控制器实习报告院系浦江学院专业自动化姓名吴诗佳学号P1501080428起讫日期20xx06520xx0617指…
-
可编程序控制器应用实训报告
可编程序控制器应用实训报告可编程序控制器PLC主要以计算机的微处理器为基础综合计算机的应用技术通讯技术以及自动控制技术而发展起来的…
-
3.可编程控制器应用实训报告
西安广播电视大学开放教育机械制造与自动化数控技术专业专科可编程控制器应用实训报告学生姓名学号指导老师分校时间学生姓名学号可编程控制…
-
PLC编程实训报告
机电一体化实训一PLC编程实训报告姓名学号班级华北电力大学工程训练中心机电一体化实训一PLC编程任务书1课程编号1712042名称…
-
plc实训报告
西安郵電大學生产实习报告书院系名称学生姓名专业名称班级实习时间自动化学院自动化20xx年2月24日至20xx年3月23日1一实验目…
-
plc实训报告
实验一三相鼠笼式异步电动机联锁正反转控制实物在电机控制实验单元完成本实验一实验目的了解用PLC控制代替传统接线控制的方法编制程序控…