avrЫЏУпФЃЪН(АќКдДГЬађ)
AVRЕЅЦЌЛњЕчдДЙмРэМАЫЏУпФЃЪНгІгУЪЕР§(КЌдДДњТы)
AVRЕЅЦЌЛњЕчдДЙмРэМАЫЏУпФЃЪНгІгУЪЕР§(КЌдДДњТы)
/***********************************************
**** AVR ЕчдДЙмРэ_ЫЏУпФЃЪНЗЖР§ ***
**** ***
**** зїепЃК HJJourAVR ***
**** БрвыЦїЃКWINAVR20050214 ***
**** ***
***********************************************/
/*
БОГЬађМђЕЅЕФЪОЗЖСЫШчКЮСюAVR ATMEGA16НјШыЫЏУпзДЬЌМАЛНаб
ЕчдДЙмРэМАЫЏУпФЃЪНЕФНщЩм
НјШызюЕЭКФЕчЕФЕєЕчФЃЪН
ЙиБеИїжжФЃПщ
ЭтВПжаЖЯЛНаб
M16ЕєЕчФЃЪНЕФКФЕчЧщПі(ПДУХЙЗЙиБе),ЪБжгЮЊФкВПRC 1MHz
0.9uA@Vcc=5.0V [ЪжВсЕФЭМБэдМЮЊ1.1uA]
0.3uA@Vcc=3.3V [ЪжВсЕФЭМБэдМЮЊ0.4uA]
//ВтСПЕФЪ§зжЭђгУБэЪЧFLUKE 15B,ЗжБцТЪ0.1uA
етИіГЬађашвЊMCUНјШыанУпзДЬЌЃЌЮЊЪЕЯжзюЕЭЙІКФЃЌJTAGНгПкЛсБЛЙиБеЃЌжЛФмЭЈЙ§LEDЕФБфЛЏРДЙлВьГЬађЕФдЫааЁЃ
етИіЪЕбщРяУцЃЌгУSTK500(AVRISP) ISPЯТдиЯпРДЩеТМИќЗНБуЁЃ
ШлЫПЮЛЩшжУ
1 ЙиЖЯBODЙІФм BODEN=1
2 ШчЙћгУISPЗНЪНЩеТМЃЌОЭПЩвдЭъШЋЙиБеJTAGПкСЫ OCEEN=1ЃЌJTAGEN=1
*/
#include <avr/io.h>
#include <avr/signal.h>
#include <avr/interrupt.h>
#include <avr/delay.h>
//ЪБжгЖЈЮЊФкВПRC 1MHz,F_CPU=1000000 вВПЩвдВЩгУЦфЫћЪБжг
#include <avr/sleep.h>
/*
sleep.hРяУцЖЈвхЕФГЃЪ§ЃЌЖдгІИїжжЫЏУпФЃЪН
#define SLEEP_MODE_IDLE 0
ПеЯаФЃЪН
#define SLEEP_MODE_ADC _BV(SM0)
ADC дыЩљвжжЦФЃЪН
#define SLEEP_MODE_PWR_DOWN _BV(SM1)
ЕєЕчФЃЪН
#define SLEEP_MODE_PWR_SAVE (_BV(SM0) | _BV(SM1))
ЪЁЕчФЃЪН
#define SLEEP_MODE_STANDBY (_BV(SM1) | _BV(SM2))
Standby ФЃЪН
#define SLEEP_MODE_EXT_STANDBY (_BV(SM0) | _BV(SM1) | _BV(SM2)) РЉеЙStandbyФЃЪН
КЏЪ§
void set_sleep_mode (uint8_t mode);
ЩшЖЈЫЏУпФЃЪН
void sleep_mode (void);
НјШыЫЏУпзДЬЌ
*/
//ЙмНХЖЈвх
#define LED 0 //PB0 Ч§ЖЏLEDЃЌЕЭЕчЦНгааЇ
#define KEY_INT2 0 //PB3 АДМќЃЌ ЕЭЕчЦНгааЇ
void delay_10ms(unsigned int t)
{
/*
гЩгкФкВПКЏЪ§_delay_ms() зюИпбгЪБНЯЖЬ
262.144mS@1MHz / 32.768ms@8MHz / 16.384ms@16MHz
ЙЪБраДСЫетЬѕКЏЪ§ЃЌЪЕЯжИќГЄЕФбгЪБ,ВЂФмСюГЬађФмЪЪгІИїжжЪБжгЦЕТЪ */
while(t--)
_delay_ms(10);
}
int main(void)
{
unsigned char i;
//ЩЯЕчФЌШЯDDRx=0x00,PORTx=0x00 ЪфШыЃЌЮоЩЯРЕчзш
PORTA=0xFF; //ВЛгУЕФЙмНХЪЙФмФкВПЩЯРЕчзшЁЃ
PORTC=0xFF;
PORTD=0xFF;
PORTB=0xFF;
DDRB =(1<<LED); //PB0ЩшЮЊЪфГіИпЕчЦНЃЌЕЦУ№
/*
ЖЫПкв§НХ
НјШыанУпФЃЪНЪБЃЌЫљгаЕФЖЫПкв§НХЖМгІИУХфжУЮЊжЛЯћКФзюаЁЕФЙІКФЁЃ
зюживЊЕФЪЧБмУтЧ§ЖЏЕчзшадИКдиЁЃ
дканУпФЃЪНЯТI/O ЪБжгclkI/O КЭADC ЪБжгclkADC ЖМБЛЭЃжЙСЫЃЌЪфШыЛКГхЦївВНћжЙСЫЃЌДгЖјБЃжЄЪфШыЕчТЗВЛЛсЯћКФЕчСїЁЃ
дкФГаЉЧщПіЯТЪфШыТпМЪЧЪЙФмЕФЃЌгУРДМьВтЛНабЬѕМўЁЃгУгкДЫЙІФмЕФОпЬхв§НХЧыВЮМћЁА Ъ§зжЪфШыЪЙФмКЭанУпФЃЪНЁБ ЁЃ
ШчЙћЪфШыЛКГхЦїЪЧЪЙФмЕФЃЌДЫЪБЪфШыВЛФмаќПеЃЌаХКХЕчЦНвВВЛгІИУНгНќVCC/2ЃЌЗёдђЪфШыЛКГхЦїЛсЯћКФЖюЭтЕФЕчСїЁЃ
IOзїЪфГі(DDR=1)ЪБЃЌЮЌГжзДЬЌВЛБф
*/
/*
ПДУХЙЗЖЈЪБЦї(ЩЯЕчФЌШЯЪЧЙиБеЕФ)
ШчЙћЯЕЭГЮоашРћгУПДУХЙЗЃЌетИіФЃПщвВПЩвдЙиБеЁЃ
ШєЪЙФмЃЌдђдкШЮКЮанУпФЃЪНЯТЖМГжајЙЄзїЃЌДгЖјЯћКФЕчСїЁЃ
дкЩюВуДЮЕФЫЏУпФЃЪНЯТЃЌетИіЕчСїНЋеМзмЕчСїЕФКмДѓБШжиЁЃ
МйЩшПДУХЙЗЖЈЪБЦїЪЙФмСЫЃЌЙиБеГЬЪНШчЯТ
1. дкЭЌвЛИіжИСюФкЖдWDTOE КЭWDE аД"1ЁАЃЌМДЪЙWDE вбОЮЊ"1ЁА
2. дкНєНгЕФ4 ИіЪБжгжмЦкжЎФкЖдWDE аД"0ЁБ
*/
WDTCR=(1<<WDTOE)|(1<<WDE);
WDTCR=(0<<WDE);
//ЛђЪЙгУwdt.hРяУцЕФwdt_disable()КЏЪ§
/*
ФЃЪ§зЊЛЛЦї(ЩЯЕчФЌШЯЪЧЙиБеЕФ)
ЪЙФмЪБЃЌ ADCдкЫЏУпФЃЪНЯТМЬајЙЄзїЁЃ
ЮЊСЫНЕЕЭЙІКФЃЌдкНјШыЫЏУпФЃЪНжЎЧАашвЊНћжЙADCЁЃ
жиаТЦєЖЏКѓЕФЕквЛДЮзЊЛЛЮЊРЉеЙЕФзЊЛЛЁЃ
МйЩшФЃЪ§зЊЛЛЦїЪЙФмСЫЃЌЙиБеГЬЪНШчЯТ
*/
ADCSRA=(0<<ADEN);
/*
ФЃФтБШНЯЦї(ЩЯЕчФЌШЯЪЧДђПЊЕФЃЌашвЊЪжЙЄЙиБе)
дкПеЯаФЃЪНЪБЃЌШчЙћУЛгаЪЙгУФЃФтБШНЯЦїЃЌПЩвдНЋЦфЙиБеЁЃдкADC дыЩљвжжЦФЃЪНЯТвВЪЧШчДЫЁЃ
дкЦфЫћЫЏУпФЃЪНФЃФтБШНЯЦїЪЧздЖЏЙиБеЕФЁЃ
ШчЙћФЃФтБШНЯЦїЪЙгУСЫФкВПЕчбЙЛљзМдДЃЌдђВЛТлдкЪВУДЫЏУпФЃЪНЯТЖМашвЊЙиБеЫќЁЃЗёдђФкВПЕчбЙЛљзМдДНЋвЛжБЪЙФмЁЃ
ЙиБеГЬЪНШчЯТ
*/
ACSR=(1<<ACD);
/*
ЕєЕчМьВтBOD (гЩШлЫПЮЛBODENПижЦ)
ШчЙћЯЕЭГУЛгаРћгУЕєЕчМьВтЦїBODЃЌетИіФЃПщвВПЩвдЙиБеЁЃ
ШчЙћШлЫПЮЛBODEN БЛБрГЬЃЌДгЖјЪЙФмСЫBOD ЙІФмЃЌЫќНЋдкИїжжанУпФЃЪНЯТМЬајЙЄзїЁЃ дкЩюВуДЮЕФанУпФЃЪНЯТЃЌетИіЕчСїНЋеМзмЕчСїЕФКмДѓБШжиЁЃ
ЩшжУШлЫПЮЛBODEN=1 ЙиЖЯBODЙІФм
*/
/*
ЦЌФкЛљзМЕчбЙ
ЪЙгУBODЁЂФЃФтБШНЯЦїКЭADC ЪБПЩФмашвЊФкВПЕчбЙЛљзМдДЁЃ
ШєетаЉФЃПщЖМНћжЙСЫЃЌдђЛљзМдДвВПЩвдНћжЙЁЃ
жиаТЪЙФмКѓгУЛЇБиаыЕШД§ЛљзМдДЮШЖЈжЎКѓВХПЩвдЪЙгУЫќЁЃ
ШчЙћЛљзМдДдканУпЙ§ГЬжаЪЧЪЙФмЕФЃЌЦфЪфГіСЂМДПЩвдЪЙгУЁЃ
ЕБBODЁЂФЃФтБШНЯЦїКЭADCЖМНћжЙСЫЃЌдђЛљзМдДвВздЖЏНћжЙСЫЁЃ
*/
/*
JTAG НгПкгыЦЌЩЯЕїЪдЯЕЭГ
ШчЙћЭЈЙ§ШлЫПЮЛOCDENЪЙФмСЫЦЌЩЯЕїЪдЯЕЭГЃЌЕБаОЦЌНјШыЕєЕчЛђЪЁЕчФЃЪНЪБжїЪБжгБЃГждЫааЁЃ
дканУпФЃЪНжаетИіЕчСїеМзмЕчСїЕФКмДѓБШжиЁЃ
ЯТУцгаШ§жжЬцДњЗНЗЈЃК
1 ВЛБрГЬOCDEN
2 ВЛБрГЬJTAGEN
3 жУЮЛMCUCSR ЕФJTD
ЕБJTAG НгПкЪЙФмЖјJTAG TAP ПижЦЦїУЛгаНјааЪ§ОнНЛЛЛЪБЃЌв§НХTDO НЋаќПеЁЃ ШчЙћгыTDO в§НХСЌНгЕФгВМўЕчТЗУЛгаЩЯРЕчзшЃЌЙІКФНЋдіМгЁЃ
ЦїМўЕФв§НХTDI АќКЌвЛИіЩЯРЕчзшЃЌвђДЫдкЩЈУшСДжаЮоашЮЊЯТвЛИіаОЦЌЕФTDO в§НХЩшжУЩЯРЕчзшЁЃ
ЭЈЙ§жУЮЛMCUCSRМФДцЦїЕФJTD ЛђВЛЖдJTAG ШлЫПЮЛБрГЬПЩвдНћжЙJTAG НгПкЁЃ
JTD: НћжЙJTAG НгПк(MCUПижЦгызДЬЌМФДцЦїMCUCSR Bit7)
ДЫЮЛЮЊ0 ЪБЃЌШчЙћJTAGENШлЫПЮЛБЛБрГЬдђJTAG НгПкЪЙФмЁЃ
ШчЙћетЮЛЮЊ1ЃЌ JTAGНгПкНћжЙЁЃ
ЮЊСЫБмУтЮовтЕФНћжЙЛђЪЙФмJTAGНгПкЃЌБиаыЭЈЙ§вЛИіЪБМфађСаРДИФБфJTD ЮЛЁЃ гІгУШэМўБиаыдкЫФИіЪБжгжмЦкФкНЋЦкЭћЕФЪ§жЕСНДЮаДШыJTDЁЃ
ШчЙћJTAG НгПкУЛгагыЦфЫћJTAGЕчТЗСЌНгЃЌ JTDгІИУжУЮЛЁЃетбљзіЕФдвђЪЧЮЊСЫБмУтJTAGНгПкTDOв§НХЕФОВЬЌЕчСїЁЃ
дкШэМўжаЙиБеJTAGНгПкЕФЗНЗЈ
*/
MCUCSR=(1<<JTD);
MCUCSR=(1<<JTD);
/*
ЕєЕчФЃЪН
ЕБSM2..0 ЮЊ010 ЪБЃЌ SLEEP жИСюНЋЪЙMCU НјШыЕєЕчФЃЪНЁЃ
дкДЫФЃЪНЯТЃЌЭтВПОЇЬхЭЃеёЃЌЖјЭтВПжаЖЯЁЂСНЯпНгПкЕижЗЦЅХфМАПДУХЙЗЃЈШчЙћЪЙФмЕФЛАЃЉМЬајЙЄзїЁЃ
жЛгаЭтВПИДЮЛЁЂПДУХЙЗИДЮЛЁЂBOD ИДЮЛЁЂСНЯпНгПкЕижЗЦЅХфжаЖЯЁЂЭтВПЕчЦНжаЖЯINT0 ЛђINT1ЃЌЛђЭтВПжаЖЯINT2 ПЩвдЪЙMCU ЭбРыЕєЕчФЃЪНЁЃ
етИіЫЏУпФЃЪНЭЃжЙСЫЫљгаЕФЪБжгЃЌжЛгавьВНФЃПщПЩвдМЬајЙЄзїЁЃ
ЕБЪЙгУЭтВПЕчЦНжаЖЯЗНЪННЋMCU ДгЕєЕчФЃЪНЛНабЪБЃЌБиаыБЃГжЭтВПЕчЦНвЛЖЈЕФЪБМфЁЃ ДгЪЉМгЕєЕчЛНабЬѕМўЕНеце§ЛНабгавЛИібгГйЪБМфЃЌДЫЪБМфгУгкЪБжгжиаТЦєЖЏВЂЮШЖЈЯТРДЁЃ ЛНабжмЦкгыгЩШлЫПЮЛCKSEL ЖЈвхЕФИДЮЛжмЦкЪЧвЛбљЕФЁЃ
ШчЙћдкЫЏУпЙ§ГЬжаЗЂЩњСЫИДЮЛЃЌдђMCU ЛНабКѓДгжаЖЯЯђСППЊЪМжДаа
ЪЙФмЕФжаЖЯПЩвдНЋНјШыЫЏУпФЃЪНЕФMCU ЛНабЃЌ ОЙ§ЦєЖЏЪБМфЃЌЭтМг4ИіЪБжгжмЦкКѓЃЌMCUОЭПЩвддЫаажаЖЯР§ГЬСЫЁЃШЛКѓЗЕЛиЕНSLEEP ЕФЯТвЛЬѕжИСюЁЃ
*/
MCUCSR=(0<<ISC2); //INT2 ЕФЯТНЕбиМЄЛюжаЖЯ(ФЌШЯЕФЃЌетОфЛАПЩвдВЛаД)
GICR=(1<<INT2); //ЪЙФмЭтВПжаЖЯINT2
sei(); //ЪЙФмШЋОжжаЖЯ
while(1)
{
for (i=0;i<10;i++) //LEDЩСЖЏ10ДЮКѓНјШыЕєЕчФЃЪНЕФЫЏУпзДЬЌ
{
delay_10ms(30);
PORTB&=~(1<<LED); //ЕуССLED
delay_10ms(30);
PORTB|=(1<<LED); //ЯЈУ№LED
}
set_sleep_mode(SLEEP_MODE_PWR_DOWN); //ЩшЖЈЮЊЕєЕчФЃЪН
sleep_mode(); //НјШыЫЏУпзДЬЌ
/*
вВПЩвдздааБраД
MCUCR=(0<<SM2)|(1<<SM1)|(0<<SM0); //ЩшЖЈЮЊЕєЕчФЃЪН
asm volatile(ЁАsleepЁБ : : ); //НјШыЫЏУпзДЬЌ
*/
}
}
SIGNAL(SIG_INTERRUPT2) //ЭтВПжаЖЯ2ЗўЮёГЬађ ЛНабдД
{
PORTB&=~(1<<LED); //ЕуССLED
delay_10ms(500);
PORTB|=(1<<LED); //ЯЈУ№LED
delay_10ms(100);
/*LEDГЄСС5УыжгЃЌЯЈУ№1УыжгКѓЃЌЭЫГіжаЖЯЗўЮёГЬађЃЌШЛКѓЗЕЛиЕНSLEEP ЕФЯТвЛЬѕжИСю*/ }
/*
ГЬађдЫаааЇЙћ
ЭђгУБэДђЕНжБСїЕчСїЕФзюаЁЕЕЮЛ(uAЗжБцТЪ)ЃЌНгЕНПЊЙиЕФСНЭЗ
ЩеТМКѓвЊАбSTK500АЮГіЃЌЗёдђЮоЗЈВтЕУе§ШЗЕФЕчСїЪ§ОнЁЃ
ЩЯЕчКѓLEDЩСЖЏ10ДЮКѓНјШыЕєЕчФЃЪНЕФЫЏУпзДЬЌ
ДЫЪБПЩЖЯПЊПЊЙи
ПДПДЭђгУБэЕФЖСЪ§
ШЛКѓНгЭЈПЊЙи
АДЯТ INT2АДМќЃЌНЋЛсЗЂЯжLEDГЄСС5УыжгЃЌЯЈУ№1УыжгКѓЃЌЭЫЛижїГЬађЃЌLEDЩСЖЏ10ДЮКѓНјШыЕєЕчФЃЪНЕФЫЏУпзДЬЌ
ШчЙћАДЯТИДЮЛАДМќЃЌТэЩЯИДЮЛЁЃ
ЭјгбПЩвдБраДЦфЫћЫЏУпФЃЪН/ПЊЙиИїжжФЃПщ/ЦфЫћЪБжгдД/ЦфЫћЕчдДЕчбЙРДВтЪдЕчСїЯћКФЧщПі */
/*
ЕчдДЙмРэМАЫЏУпФЃЪН
ЫЏУпФЃЪНПЩвдЪЙгІгУГЬађЙиБеMCUжаУЛгаЪЙгУЕФФЃПщЃЌДгЖјНЕЕЭЙІКФЁЃ
AVR ОпгаВЛЭЌЕФЫЏУпФЃЪНЃЌдЪаэгУЛЇИљОнздМКЕФгІгУвЊЧѓЪЕЪЉМєВУЁЃ
НјШыЫЏУпФЃЪНЕФЬѕМўЪЧжУЮЛМФДцЦїMCUCRЕФSEЃЌШЛКѓжДааSLEEP жИСюЁЃ
ОпЬхФФвЛжжФЃЪН( ПеЯаФЃЪНЁЂADC дыЩљвжжЦФЃЪНЁЂЕєЕчФЃЪНЁЂЪЁЕчФЃЪНЁЂStandby ФЃЪНКЭРЉеЙStandbyФЃЪН) гЩMCUCR ЕФSM2ЁЂSM1 КЭSM0 ОіЖЈЁЃ
ЪЙФмЕФжаЖЯПЩвдНЋНјШыЫЏУпФЃЪНЕФMCU ЛНабЁЃ
ОЙ§ЦєЖЏЪБМфЃЌЭтМг4ИіЪБжгжмЦкКѓЃЌMCUОЭПЩвддЫаажаЖЯР§ГЬСЫЁЃШЛКѓЗЕЛиЕНSLEEP ЕФЯТвЛЬѕжИСюЁЃ
ЛНабЪБВЛЛсИФБфМФДцЦїЮФМўКЭSRAMЕФФкШнЁЃ
ШчЙћдкЫЏУпЙ§ГЬжаЗЂЩњСЫИДЮЛЃЌдђMCU ЛНабКѓДгжаЖЯЯђСППЊЪМжДаа
ашвЊСЫНтAVRаОЦЌФкВПВЛЭЌЕФЪБжгЯЕЭГМАЦфЗжВМЃЌдкбЁдёКЯЪЪЕФЫЏУпФЃЪНЪБЗЧГЃгагУЁЃ
MCUПижЦМФДцЦїЃMCUCR
MCUПижЦМФДцЦїАќКЌСЫЕчдДЙмРэЕФПижЦЮЛЁЃ
Bits 7, 5, 4 ЈC SM2..0: анУпФЃЪНбЁдёЮЛ 2ЁЂ1 КЭ0
етаЉЮЛгУгкбЁдёОпЬхЕФанУпФЃЪНЁЃ
SM2 SM1 SM0 анУпФЃЪН
0 0 0 ПеЯаФЃЪН
0 0 1 ADC дыЩљвжжЦФЃЪН
0 1 0 ЕєЕчФЃЪН
0 1 1 ЪЁЕчФЃЪН
1 0 0 БЃСє
1 0 1 БЃСє
1 1 0 StandbyФЃЪН(1)
1 1 1 РЉеЙStandbyФЃЪН(1)
Note:1 НідкЪЙгУЭтВПОЇЬхЛђаГеёЦїЪБStandby ФЃЪНгыРЉеЙStandby ФЃЪНВХПЩгУЁЃ
Bit 6 ЈC SE: анУпЪЙФм
ЮЊСЫЪЙMCU дкжДааSLEEP жИСюКѓНјШыанУпФЃЪНЃЌ SEБиаыжУЮЛЁЃ
ЮЊСЫШЗБЃНјШыанУпФЃЪНЪЧГЬађдБЕФгавтааЮЊЃЌНЈвщНідкSLEEP жИСюЕФЧАвЛЬѕжИСюжУЮЛSEЁЃ MCU вЛЕЉЛНабСЂМДЧхГ§SEЁЃ
ЙигкИїжжЫЏУпФЃЪНЕФЬиЕугыЛНабвЊЧѓЃЌФкШнЗБЖрЃЌЧыВЮПМЪ§ОнЪжВс
*/
ЕкЖўЦЊЃКavrдДГЬађ
ЁОНјШыВЉПЭЁПЁОНјШыТлЬГЁП ИќаТЪБМфЃК

20xxФъ07дТ18Ше фЏРРДЮЪ§ЃК 279 зїепЃК РД
дДЃК
еЊвЊЃКAVRЕЅЦЌЛњЪЧAtmelЙЋЫОЭЦГіЕФвЛИіЕЅЦЌЛњЯЕСаЁЃгЩгкИУЯЕСаЕЅЦЌЛњЕФМЏГЩЖШИпЃЌвђДЫЃЌЦфШэ/гВМўЩшМЦЖМБфЕУИќМгМђНрЁЃЮФжаНщЩмЭЈЙ§AVRЕЅЦЌЛњЕФВЖЛёжаЖЯРДЪЕЯжКьЭтЯпЭЈбЖНтТыЕФвЛжжЗНЗЈЁЃ
ЙиМќДЪЃКAVRЃЛКьЭтЯпНтТыЃЛЪфШыВЖЛёжаЖЯ
1 КьЭтЯпБрТы
КьЭтЯпБрТыЪЧЪ§ОнДЋЪфКЭМвгУЕчЦївЃПиГЃгУЕФвЛжжЭЈбЖЗНЗЈЃЌЦфЪЕжЪЪЧвЛжжТі
ПэЕїжЦЕФДЎааЭЈбЖЁЃМвЕчвЃПижаГЃгУЕФКьЭтЯпБрТыЕчТЗгаІЬPD6121GаЭHT622аЭКЭ7461аЭЕШЁЃБОЮФОЭвдетаЉЕчТЗЕФБрТыИёЪНРДЬжТлдѕбљЪЙгУAVRЕЅЦЌЛњЕФВЖЛёжаЖЯЙІФмРДЪЕЯжЦфНтТыЁЃ
КьЭтЯпЭЈбЖЕФЗЂЫЭВПЗжжївЊЪЧАбД§ЗЂЫЭЕФЪ§ОнзЊЛЛГЩвЛЖЈИёЪНЕФТіГхЃЌШЛКѓЧ§
ЖЏКьЭтЗЂЙтЙмЯђЭтЗЂЫЭЪ§ОнЁЃНгЪеВПЗждђЪЧЭъГЩКьЭтЯпЕФНгЪеЁЂЗХДѓЁЂНтЕїЃЌЛЙдГЩЭЌВНЗЂЩфИёЪНЯрЭЌЃЈЕЋИпЁЂЕЭЕчЮЛИеКУЯрЗДЕФТіГхаХКХЁЃетаЉЙЄзїЭЈГЃгЩвЛЬхЛЏЕФНгЪеЭЗРДЭъГЩЃЌжївЊЪфГіTTLМцШнЕчЦНЁЃзюКѓЭЈЙ§НтТыАбТіГхаХКХзЊЛЛГЩЪ§ОнЃЌДгЖјЪЕЯжЪ§ОнЕФДЋЪфЁЃЭМ1ЪЧвЛИіКьЭтЯпвЃПижЦЯЕЭГЕФдРэПђЭМЁЃ
ЭМ2ЪОГіИУКьЭтвЃПиЯЕЭГЕФБрТыИёЪНЁЃ
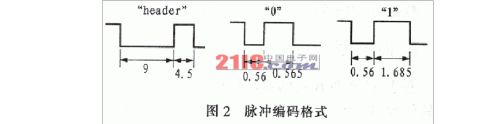
ЭМжаЃЌІЬPD6121GвЃПиЦїЕФЖўНјжЦЁА0ЁБгЩ0.56msЕФМфИєМг0.565msЕФТіГхБэЪОЃЛЖўНјжЦЁА1ЁБгЩ0.56msЕФМфИєМг1.685msЕФТіГхБэЪОЁЃУПДЮЗЂЫЭЕФ32ЖўНјжЦТыПЩЗжГЩСНВПЗжЃЌЦфжаЧА16ЮЛЪЧвЃПиЦїБцЪЖТыЃЌжївЊгУгкЧјБ№ВЛЭЌвЃПиЦїЃЌКѓ16ЮЛЪЧВйзїТыЁЃетСНИіВПЗжЕФКѓ8ЮЛЖМЪЧЧА8ЮЛЕФЗДТыЃЌгУзїЪ§ОнаЃбщЁЃУПжЁЪ§Онвд9msЕФМфИєМг4.5msЕФТіГхзїЮЊЪ§ОнЭЗЁЃ 2 AVRЕЅЦЌЛњ
AVRЯЕСаЕЅЦЌЛњЪЧAtmelЙЋЫОгк19xxФъЭЦГіЕФвЛПюШЋаТХфжУЕФЁЂВЩгУОЋМђжИСюЃЈRISC-Redued Instruction Set CPUЃЉНсЙЙЕФаТаЭ8ЮЛЕЅЦЌЛњЁЃгЩгкAVRЕЅЦЌЛњВЩгУЕЅжИСюВйзїЃЌЫљвдЃЌдкЯрЭЌЪБжгЕФЧщПіЯТЃЌAVRЕФжИСюжмЦкжЛга8051аЭЛњЕФ1/2ЃЌЖјЧвAVRВЩгУСНМЋжИСюСїЫЎЯпЃЌПЩвддкжДааЕБЧАжИСюЕФЭЌЪБЛёШЁЯТвЛЬѕжИСюЃЌЫљвдОпБИ1MI/s/MHzЕФЕїећДІРэФмСІЁЃВЛЭЌгк8051аЭЛњЕФЪЧAVRВЩгУ32ИіЭЈгУЙЄзїМФДцЦїЃЌПЫгаСЫЕЅвЛРлМгЦїЪ§ОнДІРэДјРДЕФЦПОЂЯжЯѓЃЌДгЖјЪЙЕУжИСюДњТыИќМгСщЛюЃЌБрТыИќШнвзЁЃДЫЭтЃЌAVRжаЛЙМЏГЩСЫA/DЁЂPWMЁЂEEPROMЁЂFLASHЁЂSPIЁЂWTDЁЂIICЁЂT/CЕШЙІФмЃЌЪЙЭтЮЇЕчТЗБфЕУКмМђЕЅЁЃ
3 ЛљгкAVRЕЅЦЌЛњЕФгВМўЪЕЯж
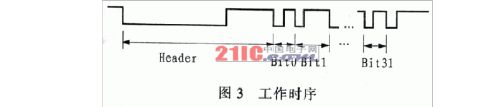
БОЮФвдAVRЯЕСажаИпадМлБШЕФAtmage8ЮЊР§ЃЌРћгУ16ЮЛЪБжгЕЅдЊT/C1ЕФВЖЛёжаЖЯРДЪЕЯжКьЭтЯпНтТыЁЃT/C1ФкВПЕФЪфШыВЖЛёЕЅдЊПЩвдгІгУгкОЋШЗВЖЛёЭтВПЗЂЩњЕФЪТЧщЃЌврМДЪТМўЗЂЩњЕФЪБМфгЁМЧ(time-stamp)ЁЃЕБвЛИіЪфШыВЖЛёЪТМўЗЂЩњдкЭтВПв§НХICPIЩЯЕФТпМЕчЦНвВЫцжЎЗЂЩњБфЛЏЪБЃЌT/C1ЕФМЦЪ§жЕНЋБЛПНБДЕНВЖЛёМФДцЦїICR1ВЂЩшжУВЖЛёжаЖЯБъжОЃЌШчЙћВЖЛёжаЖЯдЪаэВЂЧвзмжаЖЯIEДђПЊЃЌЯЕЭГдђНјШыжаЖЯЗўЮёГЬађЁЃетжжВЖЛёжаЖЯЭЈГЃгУгкЦЕТЪКЭжмЦкЕФОЋШЗВтСПЃЌШчЕчЛњзЊЫйКЭзЊЯђЕФВтСПЁЃБОЮФНщЩмдѕбљРћгУетвЛЙІФмВтСПКьЭтЯпТіГхЕФТіПэвдЪЕЯжКьЭтДЋЪфЕФНтТыЁЃВЖЛёжаЖЯЕФДЅЗЂПЩвдЪЧICP1в§НХЩЯЕчЦНБфЛЏЕФЩЯЩ§биЃЌвВПЩвдЪЧЯТНЕбиЁЃИљОнЧАЪіТіГхЕїжЦЙцдђЃЌЯжвдЯТНЕбиЮЊДЅЗЂЪТМўРДНјааЬжТлЁЃ
ЭМ3ЪЧИУЯЕЭГЕФЙЄзїЪБађЭМЃЌЭМжаЃЌвЛИіЯТНЕбиЕНЯТвЛИіЯТНЕбижЎМфИеКУЪЧвЛИіТіГхМгвЛИіМфЯЖЕФЪБМфЃЌетбљЃЌИљОнБрТыЙцдђЃЌетИіЪБМфГЄЖШЫљЖдгІЕФаХКХЙиЯЕШчЯТЃК
Ъ§ОнЭЗЕФЪБМфЃКTh=9+4.5=13.5ms
Ъ§ОнЁА0ЁБЕФЪБМфЃКT0=0.565+0.56=1.125ms
Ъ§ОнЁА1ЁБЕФЪБМфЃКT1=1.685+0.56=2.245ms
4 ШэМўБрГЬ
ЛљгкAVRЕЅЦЌЛњЕФВЖЛёжаЖЯРДЪЕЯжКьЭтБрТыЕФШэМўГЬађСїГЬШчЭМ4ЫљЪОЁЃЯТУцЪЧЦф
CгябдГЬађДњТыЃК
CГЬађДњТыЃК
*pragma interrupt_handler IceInt:6 //жаЖЯГЬађЫЕУї
void ICEInit(void) //T/C1ГѕЪМЛЏ
{
TIMSK=0X20; //ЪЙФмВЖЛёжаЖЯ
TCCR1A=0X00ЃЛ //T/C1ЪБжггыЯЕЭГЯрЭЌЃЌБОЮФЪЙгУЯЕЭГAVRФкВПздДј1MHzеёЕДдД.T/C1ЪБжгжмЦкЮЊ1ІЬs
TCCR1B=0X81ЃЛ //ЪЙФмдывєвжжЦЃЌЯТНЕбиДЅЗЂжаЖЯ
}
void IceInt(void)
{
static nint oldFall;
uint temp,newFall;
newFall=ICR1;
temp=newFall-oldFall; //МЦЫуТіГхМгМфИєЕФЪБМф
oldFall=newFall;
if(temp>1024 && temp<1225) // "0"аХКХ
{
temp=0;
}
else if(temp>2145 && temp<2345) //ЁА1ЁБаХКХ
{
temp=1;
}
else if(temp>13400 && temp<13600) //headerаХКХ {

bitcnt=0;
data0=0;
data1=0'
return; //ЗЕЛиЃЌЕШД§ЯТДЮПЊЪМНгЪе
}
else ///ИЩШХаХКХ
{
return;
}
bitcnt++;
if(bitcnt<16) //ПЊЪМНгЪеЧА16ЮЛ
{
data0=data0|(uint)temp;
data0=data0<<1;
}
else if(bitcnt==16)
{
data0=data0|(uint)temp;
}
else if(bitcnt<32) //ПЊЪМНгЪеКѓ16ЮЛ
{
data1=data1|(uint)temp;
data1=data1<<1;
}
else if(bitcnt==32) //НгЪеЭъзюКѓвЛЮЛ
}
data1=data1|(uint)temp;
}
}
ИУЕЅЦЌЛњЕФжїбЛЗГЬађжаКЌгавЛаЉДњТыМьВтbitcntЃЌЕБbitcnt=32ЪБЃЌБэУївЛжЁЪ§ОнвбНгЪеЭъГЩЃЌВЂНЋbitcntЩшжУЮЊ0xffЃЌШЛКѓЖдНгЪеЕФЪ§ОнНјааЯргІЕФДІРэЁЃГЬађЕїЪдзюКУХфКЯДЎааЭЈбЖРДНјааЃЌетбљПЩвддкPCЩЯЯдЪОЪ§ОнЛђепЛГіВЈаЮвдЗНБубщжЄЁЃIf(temp>1025 && temp<1225)етЬѕгяОфЪЧБцЪЖЁА0ЁБЕФДњТыЃЌЫќЪЧвд
T0-100<T0<T0+100ЮЊЗЖЮЇШЗКІЕФЁА0ЁБЃЌИУЗЖЮЇЕФДѓаЁОіЖЈзХНгЪеЕФзМШЗЖШгыСщУєЖШЃЌЕЅЮЛЮЊІЬsЃЌКѓУцСНИіСНЬѕгяОфКЌвхЯрЭЌЁЃ
ашвЊВЙГфЕФЪЧЕБМќХЬАДЯТГЄДя108msЪБЃЌЗЂЩфЖЫПЊЪМЗЂЫЭСЌајаХКХЃЌгыЕЅДЮЗЂЫЭвЛбљЃЌжЛЪЧheaderаХКХЪЧгЩ9msЕФМфИєМг2.5msЕФТіГхзщГЩЕФЁЃ
AVRЕЅЦЌЛњЩшМЦDS1302ЪЕЪБЪБжгГЬађ ЁОНјШыВЉПЭЁПЁОНјШыТлЬГЁП ИќаТЪБМфЃК20xxФъ07дТ13Ше фЏРРДЮЪ§ЃК 518 зїепЃК РД
дДЃК
жїГЬађЮФМўrtc.c
/********************************
AVRЕЅЦЌЛњI/OПкВйзїDS1302НгПкГЬађ
ЮФМўУћ:rtc.c
БрвыЃКWinAVR-20070525
гВМў:ATMEGA169PV ЪБжг:7372800 Hz
SCLK <---- PE5
CE <---- PE3
IO <---> PE4
ДЫГЬађдкгВМўЩЯЕїЪдЭЈЙ§!
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include<avr/io.h>
#include<util/delay.h>
//#define BURST_MODE
#define DS1302_DDR DDRE
#define DS1302_PORT PORTE
#define DS1302_PIN PINE
#define DS1302_CK PE5
#define DS1302_IO PE4
#define DS1302_CE PE3
#define delay_bus(x) _delay_loop_1(x*2)
static inline void ds1302_select(void) {
DS1302_PORT|=_BV(DS1302_CE);
delay_bus(2);
}
static inline void ds1302_unselect(void) {
DS1302_PORT&=~_BV(DS1302_CE);
delay_bus(2);
}
//ЪЕЯжЖСвЛзжНкЪБађ
static uint8_t ds1302_read_byte(void) {
uint8_t i,ret=0;
for(i=0;i<8;i++)
{
ret>>=1;
if(DS1302_PIN & _BV(DS1302_IO)) ret|=0x80;
//ИјвЛТіГх
DS1302_PORT|=_BV(DS1302_CK); delay_bus(1);
DS1302_PORT&=~_BV(DS1302_CK);
delay_bus(1);
}
return ret;
}
//ЪЕЯжаДвЛзжНкЪБађ
static void ds1302_write_byte(uint8_t dat) {
uint8_t i;
//IOПкЩшжУЮЊЪфГі
DS1302_DDR|=_BV(DS1302_IO); DS1302_PORT&=~_BV(DS1302_IO);
for(i=0;i<8;i++)
{
//ЩшжУКУЪ§ОнПк
if(dat& 0x01)
DS1302_PORT|=_BV(DS1302_IO); else
DS1302_PORT&=~_BV(DS1302_IO);
delay_bus(1);
//ИјвЛТіГх
DS1302_PORT|=_BV(DS1302_CK); delay_bus(1);
DS1302_PORT&=~_BV(DS1302_CK);
dat>>=1;
}
//IOПкЛжИДЕНЪфШызДЬЌ
DS1302_PORT&=~_BV(DS1302_IO); DS1302_DDR&=~_BV(DS1302_IO);
delay_bus(1);
}
//ЖСМФДцЦї addr: 0~8
uint8_t rtc_read_reg(uint8_t addr) {
uint8_t ret;
addr<<=1;
addr|=0x81;
ds1302_select();
ds1302_write_byte(addr);
ret=ds1302_read_byte();
ds1302_unselect();
return ret;
}
//аДМФДцЦї
void rtc_write_reg(uint8_t addr,uint8_t dat)
{
addr<<=1;
addr|=0x80;
ds1302_select();
ds1302_write_byte(addr);
ds1302_write_byte(dat);
ds1302_unselect();
}
//ЖСRAM
//дкЖрзжНк(BURST)ФЃЪНЯТЖСШЁ x ГЄЖШЕФЪ§ОнЕНbufжИЯђЕФДцДЂЧј //дкЕЅзжНкФЃЪНЯТДгЕижЗЮЊx(0~31)ЕФRAMжаЖСвЛзжНкДцДЂЕНbufДІ void rtc_read_ram(uint8_t x,uint8_t *buf)
{
#ifdef BURST_MODE
uint8_t i;
ds1302_select();
ds1302_write_byte(0xff); //read burts ram
for(i=0;i<x;i++)
buf[i]=ds1302_read_byte();
ds1302_unselect();
#else
x<<=1;
x|=0xc1;
ds1302_select();
ds1302_write_byte(x);
*buf=ds1302_read_byte();
ds1302_unselect();
#endif
}
//аДRAM
//дкЖрзжНк(BURST)ФЃЪНЯТаД x ГЄЖШЕФЪ§ОнЕНDS1302ФкВПRAM,Дг0ЕижЗПЊЪМаД //дкЕЅзжНкФЃЪНЯТдкЕижЗЮЊx(0~31)ЕФRAMЦЌаДШывЛзжНкЪ§Он
void rtc_write_ram(uint8_t x,uint8_t *buf)
{
#ifdef BURST_MODE
uint8_t i;
#endif
rtc_write_reg(7,0);//аДЪЙФм
#ifdef BURST_MODE
ds1302_select();
ds1302_write_byte(0xfe); //write burts ram
for(i=0;i<x;i++)
ds1302_write_byte(buf[i]);
ds1302_unselect();
#else
x<<=1;
x|=0xc0;
ds1302_select();
ds1302_write_byte(x);
ds1302_write_byte(*buf);
ds1302_unselect();
#endif
rtc_write_reg(7,0x80);//аДНћжЙ
}
//ЖСШЁЪБжг НЋЖСШЁЕФЪБжгвдаЁЪБ,Зжжг,УыЕФЫГађДцШыtimeжИЯђЕФЛКГхЧј //ЖСГіЕФЪ§ОнЮЊЖўНјжЦИёЪН,ЖјЗЧBCDТы
void rtc_get_time(uint8_t *time)
{
uint8_t s,m=0,h;
h=rtc_read_reg(2);
if(h & 0x80)//12аЁЪБжЦ
{
if(h& _BV(4))
m=10;
else
m=0;
if(h&_BV(5))
m+=12;
h=m+(h&0x0f);
}
else //24аЁЪБжЦ
{
h&=0x3f;
h= (h>>4)*10 + (h & 0x0f);
}
s=rtc_read_reg(0) & 0x7f;
m=rtc_read_reg(1) & 0x7f;
time[2]= (s>>4)*10 + (s & 0x0f);
time[1]= (m>>4)*10 + (m & 0x0f);
time[0]= h;
}
//ЩшжУЪБжг,timeжаЕФЪБжгИёЪНЮЊ:ЪБ,Зж,УыЖўНјжЦЪН void rtc_set_time(uint8_t *time)
{
uint8_t h,m,s;
h=time[0]%24;
m=time[1]%60;
s=time[2]%60;
//ЖўНјжЦзЊBCD
h=((h/10)<<4) + (h%10);
m=((m/10)<<4) + (m%10);
s=((s/10)<<4) + (s%10);
rtc_write_reg(7,0);//write enable
rtc_write_reg(0,s);
rtc_write_reg(1,m);
rtc_write_reg(2,h);
rtc_write_reg(7,0x80);//write disable
}
//ЖСШеРњ НЋЖСШЁЕФШеРњвдФъ,дТ,ШеЕФЫГађДцШыdateжИЯђЕФЛКГхЧј //ЖСГіЕФЪ§ОнЮЊЖўНјжЦИёЪН,ЖјЗЧBCDТы
void rtc_get_date(uint8_t *date)
{
uint8_t y,m,d;
y=rtc_read_reg(6);
m=rtc_read_reg(4)& 0x1f;
d=rtc_read_reg(3)& 0x3f;
//BCDзЊЖўНјжЦ
date[0]=(y>>4)*10 + (y&0x0f);
date[1]=(m>>4)*10 + (m&0x0f);
date[2]=(d>>4)*10 + (d&0x0f);
}
//ЩшжУШеРњ
void rtc_set_date(uint8_t *date)
{
uint8_t y,m,d;
//ЖўНјжЦзЊBCDТы
y=((date[0]/10)<<4) + (date[0]%10);
m=((date[1]/10)<<4) + (date[1]%10);
d=((date[2]/10)<<4) + (date[2]%10);
//аДШыDS1302
rtc_write_reg(7,0);
rtc_write_reg(6,y);
rtc_write_reg(4,m);
rtc_write_reg(3,d);
rtc_write_reg(7,0x80);
}
//ЖСжм
void rtc_get_day(uint8_t *day)
{
*day=rtc_read_reg(5) & 0x07;
}
//ЩшжУжм
void rtc_set_day(uint8_t *day)
{
rtc_write_reg(7,0);
rtc_write_reg(5,(*day)&0x07);
rtc_write_reg(7,0x80);
}
//ГѕЪМЛЏНгПкКЭИїМФДцЦї
void rtc_init(void)
{
//CE,CKПкЩшжУЮЊЪфГі,IOПкЩшжУЮЊЪфШы
DS1302_DDR|=_BV(DS1302_CE)|_BV(DS1302_CK);
DS1302_PORT&=~(_BV(DS1302_CE)|_BV(DS1302_CK)|_BV(DS1302_IO)); DS1302_DDR&=~_BV(DS1302_IO);
if(rtc_read_reg(0) & 0x80)//ШчЙћДІгкднЭЃзДЬЌ
{
rtc_write_reg(7,0);//аДдЪаэ
rtc_write_reg(0,0);//дЫаа
rtc_write_reg(7,0x80);//аДБЃЛЄ
}
//... ... етРяФуПЩвдМьВщфИСїГфЕчХфжУВЂЩшжУМФДцЦї
}
АќКЌЭЗЮФМў rtc.h
//rtc.h
#ifndef RTC_H
#define RTC_H
uint8_t rtc_read_reg(uint8_t addr);
void rtc_write_reg(uint8_t addr,uint8_t dat);
void rtc_read_ram(uint8_t x,uint8_t *buf);
void rtc_write_ram(uint8_t x,uint8_t *buf);
void rtc_get_time(uint8_t *time);
void rtc_set_time(uint8_t *time);
void rtc_get_date(uint8_t *date);
void rtc_set_date(uint8_t *date);
void rtc_get_day(uint8_t *day);
void rtc_set_day(uint8_t *day);
void rtc_init(void);
//зЂ:ДЫЬзНгПкКЏЪ§жаБэЪОМФДцЦїЛђRAMЕФЕижЗЮЊЦЋвЦЕижЗЖјВЛЪЧЪ§ОнЪжВсжаЕФУќСюзж
//ШчУыМФДцЦїЕФЕижЗЮЊ0 ЖјВЛЪЧ0x80Лђ0x81
#endif
DS18B20ВтЮТГЬађ
ЮФМўУћ:main.c
БрвыЃКWinAVR-20070122
гВМўЛЗОГ:CA-M8X ДђПЊЕФПЊЙиШчЯТ
S6(1,2,5,6,7) - ЭтВП4MHzОЇеёКЭ595НгПк
J8(EN-SEG) - Ъ§ТыЙмЯдЪОдЪаэ
S7(4) - СЌНгPC1 гыDS18B20Ъ§ОнПк
(дкCA-M8X ЩЯDS18B20ЮЊЗЧзмЯпЙЉЕч)
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <avr/io.h>
#include <util/delay.h>
#include <stdint.h>
#include "seg.h" //ЩљУїЪ§ТыЙмЯдЪОНгПкКЏЪ§
#define CLR_1WIRE_BUS DDRC|=_BV(PC1) //ЩшжУЮЊЪфГіЃЌДЫЪБгЩгкPORTC1ЪЧЕЭЫљвдЪфГіЕЭ
#define SET_1WIRE_BUS DDRC&=~_BV(PC1)//ЩшжУЮЊЪфШыЃЌДЫЪБгЩгкPORTC1ЪЧЕЭЫљвдГЬИпзшЃЌгжвђЮЊЭтВПгаЩЯРЕчзшЫљвдЯрЕБгкЩшжУзмЯпЮЊИп
#define GET_1WIRE_BUS PINC&_BV(PC1)
#define DS18B20_READ_ROM 0x33
#define DS18B20_MATCH_ROM 0X55
#define DS18B20_SKIP_ROM 0XCC
#define DS18B20_SEARCH_ROM 0XF0
#define DS18B20_ALARM_SEARCH_ROM 0XEC
#define DS18B20_WRITE_RAM 0X40
#define DS18B20_READ_RAM 0XBE
#define DS18B20_COPY_RAM 0X48
#define DS18B20_CONVERT_TEM 0X44
#define DS18B20_EECALL_EEPROM 0XB8
#define DS18B20_READ_POWER_SUPPLY 0XB4
//змЯпЖЫПкГѕЪМЛЏ
void BusInit(void)
{
PORTC&=~_BV(PC1);//ДЫПкзмБЃГжЕЭ
DDRC&=~_BV(PC1); //ГѕЪМЛЏЮЊЪфШы,гУЭтВПЩЯРЕчзшБЃГжзмЯпЕФИпЕчЦН
}
//гЩгкЯЕЭГЪБжгЮЊ4MHz,вЛИі_delay_loop_2е§КУбгЪБвЛus #define DelayUs(x) _delay_loop_2(x)
void DelayMs(uint16_t t)
{
uint16_t i;
for(i=0;i<t;i++)
_delay_loop_2(250 * 4);
}
//ЕЅзмЯпИДЮЛ
uint8_t ds18b20_reset(void)
{
uint8_t ret=0;
CLR_1WIRE_BUS;
DelayUs(500); //РЕЭзмЯпжСЩй480us
SET_1WIRE_BUS;
DelayUs(100);//ЪЭЗХзмЯпКѓЕШД§15-60us
if((GET_1WIRE_BUS)==0)//МьВтЕНDS18B20АбзмЯпРЕЭ ret=1; //ИДЮЛГЩЙІ
DelayUs(1000);//ЕШД§ЦїМўЪЭЗХзмЯп
return ret;
}
//ЕЅзмЯпЖСвЛзжНк
uint8_t ds18b20_read(void)
{
uint8_t data=0;
uint8_t i=0;
for(i=0;i<8;i++)
{
data>>=1;
CLR_1WIRE_BUS;
DelayUs(2);//ДЫЪБ>1us
SET_1WIRE_BUS;
DelayUs(4);//ДЫЪБ<15us
if(GET_1WIRE_BUS)
data|=0x80;
DelayUs(60);//ДЫЪБ>60us
}
return(data);
}
//ЕЅзмЯпаДвЛзжНк
void ds18b20_write(uint8_t data)
{
uint8_t i=0;
for(i=0;i<8;i++)
{
if(data&0x01)
{
CLR_1WIRE_BUS;
DelayUs(8);//8us
SET_1WIRE_BUS;
DelayUs(55);//55us
}
else
{
CLR_1WIRE_BUS;
DelayUs(55);//55us
SET_1WIRE_BUS;
DelayUs(20);//8us
}
data>>=1;
}
}
//жДаазЊЛЛ
uint8_t Ds18b20Convert(uint8_t *t)
{
//ЗЂЫЭзЊЛЛУќСю
if(ds18b20_reset()==0)
return 0;
ds18b20_write(DS18B20_SKIP_ROM); //КіТдЕижЗЦЅХф,змЯпЩЯжЛгавЛИіЦїМўЪБ,ЛђЖдзмЯпЫљгаЦїМўВйзї
ds18b20_write(DS18B20_CONVERT_TEM);//ПЊЪМзЊЛЛУќСю
//ЕШД§зЊЛЛЭъГЩ,ds18b20ФЌШЯзЊЛЛОЋЖШЮЊ12ЮЛ,ДЫЪБзюДѓзЊЛЛЪБМфЮЊ750ms DelayMs(1000);
//ЖСЮТЖШзжНк
if(ds18b20_reset()==0)
return 0;
ds18b20_write(DS18B20_SKIP_ROM); //КіТдЕижЗЦЅХф
ds18b20_write(DS18B20_READ_RAM); //ЖСRAMУќСю
t[0]=ds18b20_read();
t[1]=ds18b20_read();
return 1;
}
//ИљОнDS18B20жаЖСЕФЮТЖШзжНк,МЦЫуЪЕМЪЮТЖШжЕ
int8_t GetTemperature(uint8_t *t)
{
int8_t ret;
uint32_t val;
uint16_t tmp=(t[1]*256)+t[0];
uint8_t sflag=0;
if((t[1]&0xf8)==0xf8) //ШєИКЮТЖШ,ДгВЙТызЊЛЛ(ШЁЗДМгвЛ)
{
sflag=1;
tmp=~tmp;
tmp++;
}
tmp&=0x07ff; //ШЗБЃЧА5ЮЛЮЊ0
//ГЫ0.0625Вйзї,ЮЊДЫБОКЏЪ§жЛЪЪгУгкDS18B20 12ЮЛзЊЛЛ(ФЌШЯ)ЪБ val=((uint32_t)tmp)*625;
val/=10000;
ret=(int8_t)val;
if(sflag)
ret|=0x80;//БфИКЪ§
return ret;
}
//ВтЪджїКЏЪ§
int main(void)
{
uint8_t tmp[2];//БЃДцЮТЖШзжНк
int8_t tval; //БЃДцЮТЖШжЕ
SegInit();//Ъ§ТыЙмГѕЪМЛЏ
SegNumberOut(0,0);//ЯдЪО 0
BusInit(); //ЕЅзмЯпI/OПкГѕЪМЛЏ
while(1)
{
if(Ds18b20Convert(tmp))//ШчЙћзЊЛЛГЩЙІ
{
tval=GetTemperature(tmp);//МЦЫуЪЕМЪЮТЖШжЕ if(tval>=0)
SegNumberOut(tval,0);//ЪЎНјжЦЯдЪОЮТЖШжЕ else
SegNumberOut(0,0);//Ъ§ТыЙмЮоЗЈЯдЪОИКЪ§,жЛФмЯдЪО0 }
}
return 0;
}
seg.cЮФМў:
/********************************
74HC95Ч§ЖЏЕФЪ§ТыЙмЯдЪОФЃПщ
ЮФМўУћ:seg.c
БрвыЃКWinAVR-20070122
гВМўЛЗОГ:CA-M8X ДђПЊЕФПЊЙиШчЯТ
S6(1,2,5,6,7) - ЭтВП4MHzОЇеёКЭ595НгПк
J8(EN-SEG) - Ъ§ТыЙмЯдЪОдЪаэ
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <avr/io.h>
#include <util/delay.h>
#include <stdint.h>
#include "seg.h"
#define SER_PORT PORTD
#define SER_DAT PD4
#define SER_RCK PD5
#define SER_SCK PD6
//ЯдЪОТы(ПЩДгchipart.cnЯТдиЩњГЩЙЄОп)
static uint8_t g_aDisplayBuf[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
//Яђ595 аДвЛзжНк
static void ser_out(uint8_t dat)
{
uint8_t i;
for(i=0;i<8;i++)
{
if(dat&0x80)
SER_PORT|=_BV(SER_DAT);
else
SER_PORT&=~_BV(SER_DAT);
//ВњЩњвЦЮЛТіГх
SER_PORT|=_BV(SER_SCK);
SER_PORT&=~_BV(SER_SCK);
dat<<=1;
}
}
//Ъ§ТыЙмЯдЪОЪ§(0~255)
//num :ЯдЪОЕФЪ§ hexЃКЪЧЗёгУЪЎСљНјжЦЯдЪО void SegNumberOut(uint8_t num,uint8_t hex) {
uint8_t buf[2];//ЗЂЫЭЯдЪОТыЛКГхЧј
uint8_t temp;
if(hex) //ЪЎСљНјжЦ
{
buf[0]=g_aDisplayBuf[num>>4];//ИпЮЛ
buf[1]=g_aDisplayBuf[num&0x0f];//ЕЭЮЛ }
else//ЪЎНјжЦ
{
buf[1]=g_aDisplayBuf[num%10];
temp=num%100;
buf[0]=g_aDisplayBuf[temp/10];
temp=num/100;
if(temp>0)
buf[1]|=0x80; //ЕквЛИіЪ§ТыЙмаЁЪ§ЕуБэЪОАйЮЛ1 if(temp>1)
buf[0]|=0x80;//СНИіЪ§ТыЙмаЁЪ§ЕуБэЪОАйЮЛ2 }
//ДЎааЗЂЫЭЪ§Он
ser_out(buf[0]);
ser_out(buf[1]);
//ВњЩњЫјДцТіГх
SER_PORT|=_BV(SER_RCK);
SER_PORT&=~_BV(SER_RCK);
}
void SegInit(void)
{
//595ПижЦI/OГѕЪМЛЏ
DDRD=_BV(SER_DAT)|_BV(SER_SCK)|_BV(SER_RCK);
SER_PORT&=~_BV(SER_SCK);
SER_PORT&=~_BV(SER_RCK);
}
РћгУAVRЕЅЦЌЛњTWIФЃПщВйзїAT24CXXЕФЭЈгУГЬађ ЁОНјШыВЉПЭЁПЁОНјШыТлЬГЁП ИќаТЪБМфЃК20xxФъ07дТ13Ше фЏРРДЮЪ§ЃК 406 зїепЃК РД
дДЃК
вдЯТЮЊTWIФЃПщЕФНгПкКЏЪ§ЪЕЯж:
twi.h:
//twi.h
#ifndef TWI_H
#define TWI_H
void TwiInit(void);
uint8_t TwiStart(void);
void TwiStop(void);
uint8_t TwiWriteByte(uint8_t c);
//ЖСвЛзжНк ack: 1ЪБЗЂTW_ACKЃЌ0ЪБЗЂTW_NOACK
uint8_t TwiReadByte(uint8_t *c, uint8_t ack);
//ЕБI/OПкФЃФтЪБДЫжЕЮЊ1
//ЕБгВМў TWIНгПкЪБДЫжЕЮЊ0x18,МДЗЂЫЭSLA+WКѓНгЪеЕНACKзДЬЌ
#define NO_BUSY 0x18
#endif
twi.c:
/********************************
AVRЕЅЦЌЛњгВМўTWIФЃПщВйзїНгПкГЬађ ЮФМўУћ:twi.c
БрвыЃКWinAVR-20070122
гВМў:CA-M8X
ХфжУЃКЭтВП4MHz
ДђПЊЃКS7(1,2,3) - EEPROMСЌНг
S6(1,2) - 4MHzОЇеёСЌНг S5(5,6) - UARTСЌНг
зЂ:PC3СЌНгаДБЃЛЄв§НХ
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <avr/io.h>
#include <util/twi.h>
#include <stdint.h>
#define TWI_BAUD 10000 //ВЈЬиТЪ(10k)
void TwiInit(void)
{
TWSR=0XF8;//ВЛЗжЦЕ
//ЩшжУВЈЬиТЪ,ЧыШЗБЃTWBRВЛаЁгк10
TWBR=((F_CPU/TWI_BAUD)-16)/8;
PORTC|=_BV(PC4)|_BV(PC5);
}
uint8_t TwiStart(void)
{
TWCR = _BV(TWINT) | _BV(TWSTA) | _BV(TWEN); while ((TWCR & _BV(TWINT)) == 0) ;
return TW_STATUS;
}
//ВњЩњвЛЭЃжЙаХКХ
void TwiStop(void)
{
TWCR = _BV(TWINT) | _BV(TWSTO) | _BV(TWEN); while(TWCR&_BV(TWSTO));/*ЕШЕШЭЃжЙаХКХЭъГЩ*/ }
//аДвЛзжНк
uint8_t TwiWriteByte(uint8_t c)
{
TWDR = c;
TWCR = _BV(TWINT) | _BV(TWEN);
while ((TWCR & _BV(TWINT)) == 0);
return TW_STATUS;
}
//ЖСвЛзжНк ack: 1ЪБгІД№ЃЌ0ЪБВЛгІД№
uint8_t TwiReadByte(uint8_t *c, uint8_t ack) {
uint8_t tmp=_BV(TWINT)|_BV(TWEN);
if(ack)
tmp|=_BV(TWEA);
TWCR=tmp;
while ((TWCR & _BV(TWINT)) == 0) ;
*c=TWDR;
return TW_STATUS;
}
вдЯТЮЊAT24CXXЕФВйзїКЏЪ§ЪЕЯж:
at24cxx.h:
//AT24CXX.H
#ifndef AT24CXX_H
#define AT24CXX-H
void At24cxxWaitBusy(void);
void At24cxxConfig(uint8_t device_addr,uint8_t page_size); void At24cxxWriteByte(uint16_t addr,uint8_t dat); uint8_t At24cxxReadByte(uint16_t addr);
void At24cxxWritePage(uint16_t page_index,uint8_t *buf); void At24cxxReadPage(uint16_t page_index,uint8_t *buf);
#endif
at24cxx.c:
/********************************
ЭЈгУAT24CXXВйзїНгПкГЬађ
БОГЬађЪЪКЯгкAT24C32/64,AT24C128/256ЕШЦїМў
ЮФМўУћ:at.c
БрвыЃКWinAVR-20070122
гВМў:CA-M8X
зЂ:БОГЬађашвЊI/OФЃФтЛђгВМўЪЕЯжЕФI2CзмЯпНгПкКЏЪ§
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <avr/io.h>
#include <stdint.h>
#include "twi.h" //i2cНгПкКЏЪ§ЩљУїДІ
#define TW_WRITE 0
#define TW_READ 1
#define TW_ACK 1
#define TW_NOACK 0
/*вдЯТСНИіКъПижЦAT24CXXЕФWPв§НХ,ШчЮДСЌНгПЩЖЈвхЮЊПе:
#define EEPROM_WRITE_ENABLE
#define EEPROM_WRITE_DISABLE
AT24CXXжаWPв§НХНгЕиЪБаДдЪаэ,НгЕчдД(Ип)ЪБаДБЃЛЄ,
ШчВЛНг,ЦїМўФкВПгаНгЕиЕчзш,МДаДдЪаэ. */
//дкCA-M8XАхЩЯИУв§НХЭЈЙ§S7(3)СЌНгMEGA8ЕФPC3
#define EEPROM_WRITE_ENABLE PORTC&=~_BV(PC3),DDRC|=_BV(PC3) #define EEPROM_WRITE_DISABLE PORTC|=_BV(PC3),DDRC|=_BV(PC3)
static uint8_t g_PageSize=0;//вГДѓаЁ(АДзжНк)
static uint8_t g_DeviceAddr=0;//ЦїМўЕижЗ
static uint8_t g_PageBitCount;//вЛвГЫљеМгУЕФЮЛЪ§(ШчвЛвГЮЊ64зжНк,дђ6)
/*ЦїМўУІМьВт,дРэ:ЦїМўУІЪБВЛЛсЖджїЛњЕФаДВйзїгІД№*/
//УІМьВтНгПкКЏЪ§,жЛгавЛжжЧщПіВХашвЊЕїгУетИіКЏЪ§
//МД:ЕБИеаДЭъГЩ,вЊЖСЪ§ОнЪБ
//ЖјСЌајЕФЖСЛђепаДВйзїжЎМфВЛашвЊЕїгУетИіКЏЪ§
void At24cxxWaitBusy(void)
{
uint8_t i;
//МьВтEEPROMЪЧЗёУІ
while(1)
{
TwiStart();
i=TwiWriteByte(g_DeviceAddr);
TwiStop();
if(i==NO_BUSY)
break;
}
return ;
}
/* ЩшжУЕБЧАВйзїЦїМўЕФЕижЗКЭвГДѓаЁ
device_addrзюЕЭЮЛБиаыЮЊ0
жЛгадкЪЙгУвГЗУЮЪЦїМўЪБpage_sizeгагУ
ВЛЪЙгУвГЗУЮЪЪБПЩжИЖЈpage_sizeЮЊ0 */
void At24cxxConfig(uint8_t device_addr,uint8_t page_size)
{
uint8_t i;
g_DeviceAddr=device_addr;
g_PageSize=page_size;
g_PageBitCount=0;
if(page_size==0)
return ;
//МЦЫувЛвГЫљеМгУЮЛЪ§
for(i=1;i<10;i++)//ВЛФмДѓгк9ДЮ
{
if(page_size==(1<<i))
{
g_PageBitCount=i;
break;
}//if
}//for
}
//AT24CXXЭЈгУЫцЛњаДвЛзжНкКЏЪ§
void At24cxxWriteByte(uint16_t addr,uint8_t dat) {
At24cxxWaitBusy();
EEPROM_WRITE_ENABLE;
TwiStart();
TwiWriteByte(g_DeviceAddr );//= |TW_WRITE TwiWriteByte(addr>>8);//аДЕижЗИпзжНк
TwiWriteByte(addr);//аДЕижЗЕЭзжНк
TwiWriteByte(dat);//аДЪ§ОнзжНк
TwiStop();
EEPROM_WRITE_DISABLE;
}
//AT24CXXЭЈгУЫцЛњЖСвЛзжНкКЏЪ§
uint8_t At24cxxReadByte(uint16_t addr)
{
uint8_t ret;
TwiStart();
TwiWriteByte(g_DeviceAddr);//аДЕижЗ
TwiWriteByte(addr>>8);
TwiWriteByte(addr);
TwiStart();
TwiWriteByte(g_DeviceAddr | TW_READ);
TwiReadByte(&ret,TW_NOACK);//NO ACK
TwiStop();
return ret;
}
//AT24CXXЭЈгУаДвГКЏЪ§,page_indexЮЊвГЕижЗ,МДБэЪОЕкМИвГ void At24cxxWritePage(uint16_t page_index,uint8_t *buf) {
uint8_t i;
//вГЫїв§ЕїећЕНОјЖдЕижЗ
page_index<<=g_PageBitCount;
//МьВтEEPROMЪЧЗёУІ
At24cxxWaitBusy();
//аДвЛвГ
EEPROM_WRITE_ENABLE;
TwiStart();
TwiWriteByte(g_DeviceAddr );//= |TW_WRITE
TwiWriteByte(page_index>>8);//аДЕижЗИпзжНк
TwiWriteByte(page_index);//аДЕижЗЕЭзжНк
for(i=0;i<g_PageSize;i++)
TwiWriteByte(buf[i]);
TwiStop();
EEPROM_WRITE_DISABLE;
}
//AT24CXXЭЈгУЖСвГКЏЪ§,page_indexЮЊвГЕижЗ,МДБэЪОЕкМИвГ
void At24cxxReadPage(uint16_t page_index,uint8_t *buf)
{
uint8_t i;
//вГЫїв§ЕїећЕНОјЖдЕижЗ
page_index<<=g_PageBitCount;
TwiStart();
TwiWriteByte(g_DeviceAddr);//аДЕижЗ
TwiWriteByte(page_index>>8);
TwiWriteByte(page_index);
TwiStart();
TwiWriteByte(g_DeviceAddr | TW_READ);
for(i=0;i<g_PageSize-1;i++)
TwiReadByte(&buf[i],TW_ACK);
TwiReadByte(&buf[i],TW_NOACK);//зюКѓвЛзжНкВЛгІД№
TwiStop();
}
ВтЪдВПЗж:
uart.c:
/****************************************
ЮФМўУћЃКuart.c
****************************************/
#include <avr/io.h>
#include <stdio.h>
static int uart_putchar(char c, FILE *stream);
static FILE mystdout = FDEV_SETUP_STREAM(uart_putchar, NULL, _FDEV_SETUP_WRITE);
static int uart_putchar(char c, FILE *stream)
{
if (c == '\n')
uart_putchar('\r', stream);
loop_until_bit_is_set(UCSRA, UDRE); UDR = c;
return 0;
}
void StdIoInit(void)
{
UCSRB=0;
UBRRH=0;
UBRRL=25; //9600
UCSRB=_BV(TXEN);
stdout = &mystdout;
stderr = &mystdout;
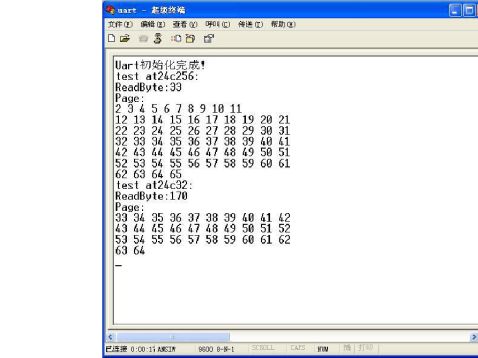
printf("UartГѕЪМЛЏЭъГЩ!\n");
}
test.c:
/********************************
AVRЕЅЦЌЛњTWIФЃПщВйзїAT24CXXЕФЭЈгУГЬађ ЮФМўУћ:main.c
БрвыЃКWinAVR-20070122
гВМў:CA-M8X
ХфжУЃКЭтВП4MHz
ДђПЊЃКS7(1,2,3) - EEPROMСЌНг S6(1,2) - 4MHzОЇеёСЌНг S5(5,6) - UARTСЌНг зЂ:PC3СЌНгаДБЃЛЄв§НХ
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн WEB:
Email: changfutong@sina.com
*******************************/
#include<avr/io.h>
#include<stdint.h>
#include<stdio.h>
#include "twi.h"
#include "at24cxx.h"
#define AT24C256_PAGE_SIZE 64 //AT24C256вГДѓаЁ
#define AT24C32_PAGE_SIZE 32 //AT24C32вГДѓаЁ
#define MAX_PAGE_SIZE 64 //зюДѓПЩФмгУЕНЕФЛКГх,дкЖЈвхЛКГхЪБЪЙгУ
#define AT24C256A_ADDR 0xA0 //CAM8XЕквЛЦЌAT24C256аОЦЌЕижЗ
#define AT24C256B_ADDR 0xA2 //CAM8XЕкЖўЦЌAT24C256аОЦЌЕижЗ(CAM8XБъзМХфжУУЛгаКИНгетПщДцДЂЦїаОЦЌ)
#define AT24C32_ADDR 0xA4 //AT24C32аОЦЌЕижЗ
static uint8_t g_PageBuffer[MAX_PAGE_SIZE];//вГЪ§ОнЕФЛКГх
void StdIoInit(void);//uart.cжаЪЕЯж,ЕїЪдгУ
//ВтЪдAT24C256
void test256(void)
{
uint8_t i;
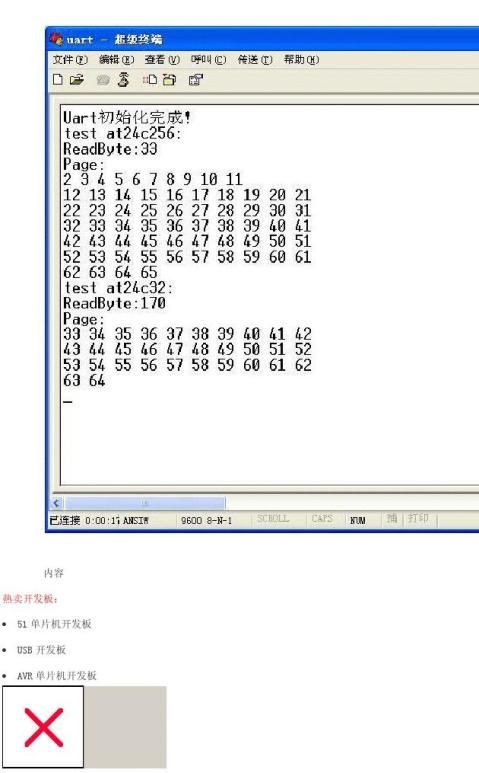
printf("test at24c256:\n");
At24cxxConfig(AT24C256A_ADDR,AT24C256_PAGE_SIZE);
//ВтЪдЫцЛњЖС/аДзжНк
At24cxxWriteByte(333,33);
At24cxxWaitBusy();
i=At24cxxReadByte(333);
printf("ReadByte:%d\n",i);
//ВтЪдЫцЛњЖС/аДвГ
for(i=0;i<AT24C256_PAGE_SIZE;i++)
g_PageBuffer[i]=i+2;
At24cxxWritePage(3,g_PageBuffer);
At24cxxWaitBusy();
At24cxxReadPage(3,g_PageBuffer);
printf("Page:\n");
for(i=0;i<AT24C256_PAGE_SIZE;i++)
{
if((i+1)%10==0)
printf("%d\n",g_PageBuffer[i]);
else
printf("%d ",g_PageBuffer[i]);
}
printf("\n");
}
//ВтЪдat24c32
void test32(void)
{
uint8_t i;
printf("test at24c32:\n");
At24cxxConfig(AT24C32_ADDR,AT24C32_PAGE_SIZE);
//ВтЪдЫцЛњЖС/аДзжНк
At24cxxWriteByte(200,170);
At24cxxWaitBusy();
i=At24cxxReadByte(200);
printf("ReadByte:%d\n",i);
//ВтЪдЫцЛњЖС/аДвГ
for(i=0;i<AT24C32_PAGE_SIZE;i++)
g_PageBuffer[i]=i+33;
At24cxxWritePage(6,g_PageBuffer);
At24cxxWaitBusy();
At24cxxReadPage(6,g_PageBuffer);
printf("Page:\n");
for(i=0;i<AT24C32_PAGE_SIZE;i++) {
if((i+1)%10==0)
printf("%d\n",g_PageBuffer[i]); else
printf("%d ",g_PageBuffer[i]); }
printf("\n");
}
int main(void)
{
StdIoInit();//uartДђгЁЪфГіГѕЪМЛЏ TwiInit(); //TWIПкГѕЪМЛЏ
test256();
test32();
while(1);
}
ВтЪдНсЙћ:
ЛљгкAVRЕЅЦЌЛњЖгСаЕФUARTЭЈаХФЃПщ ЁОНјШыВЉПЭЁПЁОНјШыТлЬГЁП ИќаТЪБМфЃК20xxФъ07дТ13Ше фЏРРДЮЪ§ЃК 339 зїепЃК РД
дДЃК
uart.c:
/********************************
ЛљгкЖгСаЕФMega8 UARTЭЈаХЧ§ЖЏГЬађ
ЮФМўУћ:uart.c
БрвыЃКWinAVR-20070122
гВМўЃКCA-M8X
ЪБжгЃКЭтВП4MHz
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <avr/io.h>
#include <avr/interrupt.h>
#include "queue.h"
#define UART_BUF_SIZE 16 //ЗЂЫЭКЭНгЪеЛКГхГЄЖШ
HQUEUE g_SendQueue; //ЗЂЫЭЖгСаОфБњ
HQUEUE g_RecvQueue;//НгЪеЖгСаОфБњ
uint8_t g_SendBuffer[UART_BUF_SIZE];//ЗЂЫЭЛКГх
uint8_t g_RecvBuffer[UART_BUF_SIZE];//НгЪеЛКГх
//НгЪежаЖЯSIG_UART_RECV
ISR(USART_RXC_vect )
{
uint8_t c=UDR;
QueueInput(&g_RecvQueue,c);
}
//ЗЂЫЭМФДцЦїПежаЖЯ
ISR (USART_UDRE_vect)
{
if(QueueGetDataCount(&g_SendQueue)>0)//ШчЙћЗЂЫЭЛКГхЖгСаВЛПе {
UDR=QueueOutput(&g_SendQueue); //ЗЂЫЭвЛзжНк
}
else //ЗёдђЙиБеЗЂЫЭжаЖЯ
{
UCSRB&=~_BV(UDRIE);//ЙиБеЪ§ОнПежаЖЯ
}
}
////////////вдЯТЮЊБОФЃПщШ§ИіНгПкКЏЪ§///////////////////////////
//ГѕЪМЛЏ
void UartInit(void)
{
//UARTгВМўГѕЪМЛЏ
UCSRB=0;
UBRRH=0;
UBRRL=25; //9600 4MHz
UCSRB=(1<<RXCIE)|(1<<RXEN)|(1<<TXEN);
//ДДНЈЗЂЫЭЃЏНгЪеЖгСа
QueueCreate(&g_SendQueue,g_SendBuffer,UART_BUF_SIZE);
QueueCreate(&g_RecvQueue,g_RecvBuffer,UART_BUF_SIZE);
}
//ЖСНгЪеЛКГхФкЕФЪ§ОнЃЌbufЮЊЖСШЁЛКГхЃЌsizeЮЊbufФмНгЪеЕФзюДѓГЄЖШЃЌЗЕЛиЪЕМЪНгЪеЕФГЄЖШ
uint8_t UartRecv(uint8_t *buf,uint8_t size)
{
uint8_t i;
for(i=0;i<size;i++)
{
if(QueueGetDataCount(&g_RecvQueue)>0)
{
cli();//вдЯТЕФЖгСаВйзїВЛПЩБЛжаЖЯ
buf[i]=QueueOutput(&g_RecvQueue);
sei();//жаЖЯжиаТдЪаэ
}
else
{
break;
}//if else
}//for
return i;//ЗЕЛиЖСЕНЕФЪ§ОнзжНкЪ§
}
//ЗЂЫЭЪ§Он ЃЌbufЮЊЗЂЫЭЪ§ОнЛКГхЦїЃЌsizeЮЊвЊЗЂЫЭЕФГЄЖШ void UartSend(uint8_t *buf,uint8_t size)
{
uint8_t i;
cli(); //вдЯТЕФЖгСаВйзїВЛПЩБЛжаЖЯ
for(i=0;i<size;i++)
QueueInput(&g_SendQueue,buf[i]);
sei(); //жаЖЯжиаТдЪаэ
UCSRB|=_BV(UDRIE);//Ъ§ОнПежаЖЯдЪаэ
}
//////////////////////////////////////////////////////////
uart.h:
//uart.h
#ifndef UART_H
#define UART_H
void UartInit(void);
uint8_t UartRecv(uint8_t *buf,uint8_t size);
void UartSend(uint8_t *buf,uint8_t size);
#endif
queue.c:
/********************************
ЖгСаЙмРэФЃПщ
ЮФМўУћ:queue.c
БрвыЃКWinAVR-20070122
аОвеЩшМЦЪв 2004-2007 АцШЈЫљга
зЊдиЧыБЃСєБОзЂЪЭдкФкЕФШЋВПФкШн
WEB:
Email: changfutong@sina.com
*******************************/
#include <stdint.h>
#include "queue.h"
//ЯђЖгСаВхШывЛзжНк
void QueueInput(PHQUEUE Q,uint8_t dat)
{
if(Q->data_count < Q->buf_size)
{
Q->pBuffer[Q->in_index]=dat; //аДШыЪ§Он
Q->in_index=(Q->in_index+1) % (Q->buf_size);//ЕїећШыПкЕижЗ Q->data_count++; //ЕїећЪ§ОнИіЪ§(ДЫВйзїВЛПЩБЛжаЖЯ) }
else
{
if(Q->error<255)
Q->error++;
}
}
//ДгЖгСаЖСГівЛзжНк
uint8_t QueueOutput(PHQUEUE Q)
{
uint8_t Ret=0;
if(Q->data_count > 0)
{
Ret=Q->pBuffer[Q->out_index]; //ЖСЪ§Он
Q->out_index=(Q->out_index+1) % (Q->buf_size); //ЕїећГіПкЕижЗ Q->data_count--;
}
return Ret;
}
//ЛёЕУЖгСажаЪ§ОнИіЪ§
uint8_t QueueGetDataCount(PHQUEUE Q)
{
return Q->data_count;
}
//ЧхПеЖгСа,жДааЪБВЛПЩБЛжаЖЯ
void QueueClear(PHQUEUE Q)
{
Q->in_index=0;
Q->out_index=0;
Q->data_count=0;
Q->error=0;
}
//ГѕЪМЛЏвЛЖгСа
void QueueCreate(PHQUEUE Q,uint8_t *buffer,uint8_t buf_size) {
Q->pBuffer=buffer;
Q->buf_size=buf_size;
QueueClear(Q);
}
queue.h:
//queue.h
#ifndef QUEUE_H_
#define QUEUE_H_
//ЖгСаЪ§ОнНсЙЙ
typedef struct QUEUE_S
{
uint8_t in_index;//ШыЖгЕижЗ
uint8_t out_index;//ГіЖгЕижЗ
uint8_t buf_size; //ЛКГхЧјГЄЖШ
uint8_t *pBuffer;//ЛКГх
volatile uint8_t data_count; //ЖгСаФкЪ§ОнИіЪ§
uint8_t error;
}HQUEUE,*PHQUEUE;
void QueueInput(PHQUEUE Q,uint8_t dat);
uint8_t QueueOutput(PHQUEUE Q);
uint8_t QueueGetDataCount(PHQUEUE Q);
void QueueClear(PHQUEUE Q);
void QueueCreate(PHQUEUE Q,uint8_t *buffer,uint8_t buf_size);
#endif