毕业设计基于单片机的超声测距仪设计外文翻译(标准格式)
外文原文
Ultrasonic ranging system design
Publication title: Sensor Review. Bradford: 1993. Vol. 13
ABSTRACT:Ultrasonic ranging technology has wide using worth in many fields,such as the industrial locale,vehicle navigation and sonar engineering.Now it has been used in level measurement,self-guided autonomous vehicles, fieldwork robots automotive navigation,air and underwater target detection,identification,location and so on.So there is an important practicing meaning to learn the ranging theory and ways deeply. To improve the precision of the ultrasonic ranging system in hand,satisfy the request of the engineering personnel for the ranging precision,the bound and the usage,a portable ultrasonic ranging system based on the single chip processor was developed.
Keywords:Ultrasound r,Ranging System,Single Chip Processor
1.Introductive
With the development of science and technology, the improvement of people's standard of living, speeding up the development and construction of the city. urban drainage system have greatly developed their situation is constantly improving. However, due to historical reasons many unpredictable factors in the synthesis of her time, the city drainage system. In particular drainage system often lags behind urban construction. Therefore, there are often good building excavation has been building facilities to upgrade the drainage system phenomenon. It brought to the city sewage, and it is clear to the city sewage and drainage culvert in the sewage treatment system. comfort is very important to people's lives. Mobile robots designed to clear the drainage culvert and the automatic control system Free sewage culvert clear guarantee robot, the robot is designed to clear the culvert sewage to the core. Control System is the core component of the development of ultrasonic range finder. Therefore, it is very important to design a good ultrasonic range finder.
2. A principle of ultrasonic distance measurement
2.1 The principle of piezoelectric ultrasonic generator
Piezoelectric ultrasonic generator is the use of piezoelectric crystal resonators to work. Ultrasonic generator, the internal structure as shown, it has two piezoelectric chip and a resonance plate. When it's two plus pulse signal, the frequency equal to the intrinsic piezoelectric oscillation frequency chip, the chip will happen piezoelectric resonance, and promote the development of plate vibration resonance, ultrasound is generated. Conversely, if the two are not inter-electrode voltage, when the board received ultrasonic resonance, it will be for vibration suppression of piezoelectric chip, the mechanical energy is converted to electrical signals, then it becomes the ultrasonic receiver.
The traditional way to determine the moment of the echo's arrival is based on thresholding the received signal with a fixed reference. The threshold is chosen well above the noise level, whereas the moment of arrival of an echo is defined as the first moment the echo signal surpasses that threshold. The intensity of an echo reflecting from an object strongly depends on the object's nature, size and distance from the sensor. Further, the time interval from the echo's starting point to the moment when it surpasses the threshold changes with the intensity of the echo. As a consequence, a considerable error may occur Even two echoes with different intensities arriving exactly at the same time will surpass the threshold at different moments. The stronger one will surpass the threshold earlier than the weaker, so it will be considered as belonging to a nearer object.
2.2The principle of ultrasonic distance measurement
Ultrasonic transmitter in a direction to launch ultrasound, in the moment to launch the beginning of time at the same time, the spread of ultrasound in the air, obstacles on his way to return immediately, the ultrasonic reflected wave received by the receiver immediately stop the clock. Ultrasound in the air as the propagation velocity of 340m / s, according to the timer records the time t, we can calculate the distance between the launch distance barrier (s), that is: s = 340t / 2
3.Ultrasonic Ranging System for the Second Circuit Design
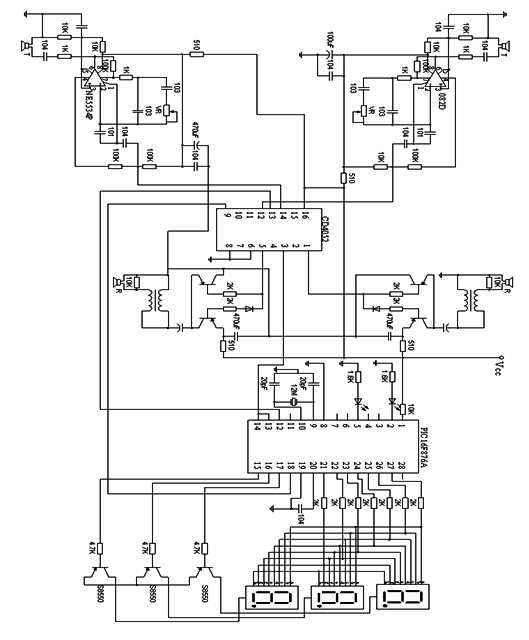
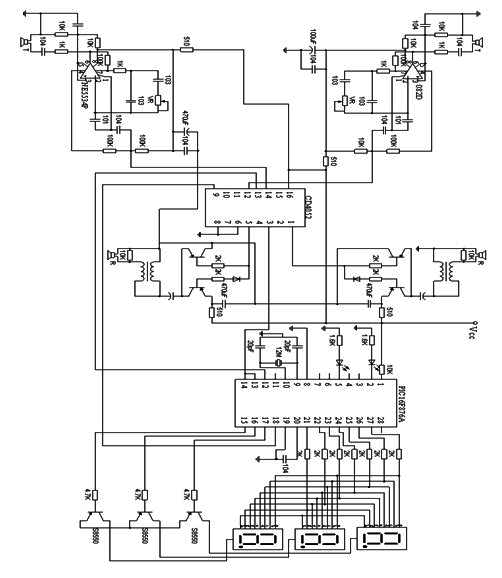
System is characterized by single-chip microcomputer to control the use of ultrasonic transmitter and ultrasonic receiver since the launch from time to time, single-chip selection of 8751, economic-to-use, and the chip has 4K of ROM, to facilitate programming. Circuit schematic diagram shown in Figure 2.
Figure 1 circuit principle diagram
3.1 40 kHz ultrasonic pulse generated with the launch
Ranging system using the ultrasonic sensor of piezoelectric ceramic sensors UCM40, its operating voltage of the pulse signal is 40kHz, which by the single-chip implementation of the following procedures to generate.
puzel: mov 14h, # 12h; ultrasonic firing continued 200ms
here: cpl p1.0; output 40kHz square wave
nop;
nop;
nop;
djnz 14h, here;
ret
Ranging in front of single-chip termination circuit P1.0 input port, single chip implementation of the above procedure, the P1.0 port in a 40kHz pulse output signal, after amplification transistor T, the drive to launch the first ultrasonic UCM40T, issued 40kHz ultrasonic pulse, and the continued launch of 200ms. Ranging the right and the left side of the circuit, respectively, then input port P1.1 and P1.2, the working principle and circuit in front of the same location.
3.2 Reception and processing of ultrasonic
Used to receive the first launch of the first pair UCM40R, the ultrasonic pulse modulation signal into an alternating voltage, the op-amp amplification IC1A and after polarization IC1B to IC2. IC2 is locked loop with audio decoder chip LM567, internal voltage-controlled oscillator center frequency of f0 = 1/1.1R8C3, capacitor C4 determine their target bandwidth. R8-conditioning in the launch of the carrier frequency on the LM567 input signal is greater than 25mV, the output from the high jump 8 feet into a low-level, as interrupt request signals to the single-chip processing.
Ranging in front of single-chip termination circuit output port INT0 interrupt the highest priority, right or left location of the output circuit with output gate IC3A access INT1 port single-chip, while single-chip P1.3 and P1. 4 received input IC3A, interrupted by the process to identify the source of inquiry to deal with, interrupt priority level for the first left right after. Part of the source code is as follows:
receive1: push psw
push acc
clr ex1; related external interrupt 1
jnb p1.1, right; P1.1 pin to 0, ranging from right to interrupt service routine circuit
jnb p1.2, left; P1.2 pin to 0, to the left ranging circuit interrupt service routine
return: SETB EX1; open external interrupt 1
pop acc
pop psw
reti
right: ...; right location entrance circuit interrupt service routine
Ajmp Return
left: ...; left Ranging entrance circuit interrupt service routine
Ajmp Return
3.3 The calculation of ultrasonic propagation time
When you start firing at the same time start the single-chip circuitry within the timer T0, the use of timer counting function records the time and the launch of ultrasonic reflected wave received time. When you receive the ultrasonic reflected wave, the receiver circuit outputs a negative jump in the end of INT0 or INT1 interrupt request generates a signal, single-chip microcomputer in response to external interrupt request, the implementation of the external interrupt service subroutine, read the time difference, calculating the distance . Some of its source code is as follows:
RECEIVE0: PUSH PSW
PUSH ACC
CLR EX0; related external interrupt 0
MOV R7, TH0; read the time value
MOV R6, TL0
CLR C
MOV A, R6
SUBB A, # 0BBH; calculate the time difference
MOV 31H, A; storage results
MOV A, R7
SUBB A, # 3CH
MOV 30H, A
SETB EX0; open external interrupt 0
POP ACC
POP PSW
RETI
For a flat target, a distance measurement consists of two phases: a coarse measurement and. a fine measurement:
Step 1: Transmission of one pulse train to produce a simple ultrasonic wave.
Step 2: Changing the gain of both echo amplifiers according to equation , until the echo is detected.
Step 3: Detection of the amplitudes and zero-crossing times of both echoes.
Step 4: Setting the gains of both echo amplifiers to normalize the output at, say 3 volts. Setting the period of the next pulses according to the : period of echoes. Setting the time window according to the data of step 2.
Step 5: Sending two pulse trains to produce an interfered wave. Testing the zero-crossing times and amplitudes of the echoes. If phase inversion occurs in the echo, determine to otherwise calculate to by interpolation using the amplitudes near the trough. Derive t sub m1 and t sub m2 .
Step 6: Calculation of the distance y using equation .
4. The ultrasonic ranging system software design
Software is divided into two parts, the main program and interrupt service routine. Completion of the work of the main program is initialized, each sequence of ultrasonic transmitting and receiving control.
Interrupt service routines from time to time to complete three of the rotation direction of ultrasonic launch, the main external interrupt service subroutine to read the value of completion time, distance calculation, the results of the output and so on.
5. Conclusions
Required measuring range of 30cm ~ 200cm objects inside the plane to do a number of measurements found that the maximum error is 0.5cm, and good reproducibility. Single-chip design can be seen on the ultrasonic ranging system has a hardware structure is simple, reliable, small features such as measurement error. Therefore, it can be used not only for mobile robot can be used in other detection systems.
Thoughts: As for why the receiver do not have the transistor amplifier circuit, because the magnification well, integrated amplifier, but also with automatic gain control level, magnification to 76dB, the center frequency is 38k to 40k, is exactly resonant ultrasonic sensors frequency
REFERENCES
1. Fox, J.D., Khuri-Yakub, B.T. and Kino, G.S., "High Frequency Acoustic Wave Measurement in Air", in Proceedings of IEEE 1983 Ultrasonic Symposium, October 31-2 November, 1983, Atlanta, GA, pp. 581-4.
2. Martin Abreu, J.M., Ceres, R. and Freire, T., "Ultrasonic Ranging: Envelope Analysis Gives Improved Accuracy", Sensor Review, Vol. 12 No. 1, 1992, pp. 17-21.
3. Parrilla, M., Anaya, J.J. and Fritsch, C., "Digital Signal Processing Techniques for High Accuracy Ultrasonic Range Measurements", IEEE Transactions: Instrumentation and Measurement, Vol. 40 No. 4, August 1991, pp. 759-63.
4. Canali, C., Cicco, G.D., Mortem, B., Prudenziati, M., and Taron, A., "A Temperature Compensated Ultrasonic Sensor Operating in Air for Distance and Proximity Measurement", IEEE Transaction on Industry Electronics, Vol. IE-29 No. 4, 1982, pp. 336-41.
5. Martin, J.M., Ceres, R., Calderon, L and Freire, T., "Ultrasonic Ranging Gets Thermal Correction", Sensor Review, Vol. 9 No. 3, 1989, pp. 153-5.
外文译文
超声波测距仪系统设计
原文出处:传感器文摘 布拉福德:1993年 第13页
摘要:超声测距技术在工业现场、车辆导航、水声工程等领域都具有广泛的应用价值,目前已应用于物位测量、机器人自动导航以及空气中与水下的目标探测、识别、定位等场合。因此,深入研究超声的测距理论和方法具有重要的实践意义。为了进一步提高测距的精确度,满足工程人员对测量精度、测距量程和测距仪使用的要求,本文研制了一套基于单片机的便携式超声测距系统。
关键词:超声波,测距仪,单片机
1、前言
随着科技的发展,人们生活水平的提高,城市发展建设加快,城市给排水系统也有较大发展,其状况不断改善。但是,由于历史原因合成时间住的许多不可预见因素,城市给排水系统,特别是排水系统往往落后于城市建设。因此,经常出现开挖已经建设好的建筑设施来改造排水系统的现象。城市污水给人们带来了困扰,因此箱涵的排污疏通对大城市给排水系统污水处理,人们生活舒适显得非常重要。而设计研制箱涵排水疏通移动机器人的自动控制系统,保证机器人在箱涵中自由排污疏通,是箱涵排污疏通机器人的设计研制的核心部分。控制系统核心部分就是超声波测距仪的研制。因此,设计好的超声波测距仪就显得非常重要了。
2、超声波测距原理
2.1压电式超声波发生器原理
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。超声波发生器内部结构,它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波 时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
测量脉冲到达时间的传统方法是以拥有固定参数的接收信号开端为基础的。这个界限恰恰选于噪音水平之上,然而脉冲到达时间被定义为脉冲信号刚好超过界限的第一时刻。一个物体的脉冲强度很大程度上取决于这个物体的自然属性尺寸还有它与传感器的距离。进一步说,从脉冲起始点到刚好超过界限之间的时间段随着脉冲的强度而改变。结果,一种错误便出现了——两个拥有不同强度的脉冲在不同时间超过界限却在同一时间到达。强度较强的脉冲会比强度较弱的脉冲超过界限的时间早点,因此我们会认为强度较强的脉冲属于较近的物体。
2.2超声波测距原理
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2
图1 电路原理图
3、超声波测距系统的电路设计
系统的特点是利用单片机控制超声波的发射和对超声波自发射至接收往返时间的计时,单片机选用C51,经济易用,且片内有4K的ROM,便于编程。电路原理图如图1所示。
3.1 40kHz 脉冲的产生与超声波发射
测距系统中的超声波传感器采用UCM40的压电陶瓷传感器,它的工作电压是40kHz的脉冲信号,这由单片机执行下面程序来产生。
puzel: mov 14h, #12h;超声波发射持续200ms
here: cpl p1.0 ; 输出40kHz方波
nop ;
nop ;
nop ;
djnz 14h,here;
ret
前方测距电路的输入端接单片机P1.0端口,单片机执行上面的程序后,在P1.0 端口输出一个40kHz的脉冲信号,经过三极管T放大,驱动超声波发射头UCM40T,发出40kHz的脉冲超声波,且持续发射200ms。右侧和左侧测 距电路的输入端分别接P1.1和P1.2端口,工作原理与前方测距电路相同。
3.2超声波的接收与处理
接收头采用与发射头配对的UCM40R,将超声波调制脉冲变为交变电压信号,经运算放大器IC1A和IC1B两极放大后加至IC2。IC2是带有锁 定环的音频译码集成块LM567,内部的压控振荡器的中心频率f0=1/1.1R8C3,电容C4决定其锁定带宽。调节R8在发射的载频上,则LM567 输入信号大于25mV,输出端8脚由高电平跃变为低电平,作为中断请求信号,送至单片机处理.
前方测距电路的输出端接单片机INT0端口,中断优先级最高,左、右测距电路的输出通过与门IC3A的输出接单片机INT1端口,同时单片机P1.3和P1.4接到IC3A的输入端,中断源的识别由程序查询来处理,中断优先级为先右后左。部分源程序如下:
receive1:push psw
push acc
clr ex1; 关外部中断1
jnb p1.1,right;P1.1引脚为0,转至右测距电路中断服务程序
jnb p1.2,left;P1.2引脚为0,转至左测距电路中断服务程序
return: SETB EX1; 开外部中断1
pop acc
pop psw
reti
right: ... ; 右测距电路中断服务程序入口
ajmp return
left: ... ; 左测距电路中断服务程序入口
ajmp return
3.3计算超声波传播时间
在启动发射电路的同时启动单片机内部的定时器T0,利用定时器的计数功能记录超声波发射的时间和收到反射波的时间。当收到超声波反射波时,接收电路 输出端产生一个负跳变,在INT0或INT1端产生一个中断请求信号,单片机响应外部中断请求,执行外部中断服务子程序,读取时间差,计算距离。其部分源程序如下:
RECEIVE0: PUSH PSW
PUSH ACC
CLR EX0 ; 关外部中断0
MOV R7, TH0 ; 读取时间值
MOV R6, TL0
CLR C
MOV A, R6
SUBB A, #0BBH; 计算时间差
MOV 31H, A ; 存储结果
MOV A, R7
SUBB A, #3CH
MOV 30H, A
SETB EX0 ; 开外部中断0
POP ACC
POP PSW
RETI
对于一个平坦的目标,距离测量包括两个阶段:粗糙的测量和精细测量。
第一步:脉冲的传送产生一种简单的超声波。
第二步:根据公式改变回波放大器的获得量直到回拨被检测到。
第三步:检测两种回波的振幅与过零时间。
第四步:设置回波放大器的所得来规格输出,假定是3伏。通过脉冲的周期设置下一个脉冲。根据第二部的数据设定时间窗。
第五步:发射两串脉冲产生干扰波。测量过零时间与回波的振幅。如果逆向发生在回波中,决定要不通过在低气压插入振幅。
第六步:通过公式计算距离y。
4、超声波测距系统的软件设计
软件分为两部分,主程序和中断服务程序。主程序完成初始化工作、各路超声波发射和接收顺序的控制。定时中断服务子程序完成三方向超声波的轮流发射,外部中断服务子程序主要完成时间值的读取、距离计算、结果的输出等工作。
5、结论
对所要求测量范围30cm~200cm内的平面物体做了多次测量发现,其最大误差为0.5cm,且重复性好。可见基于单片机设计的超声波测距系统具有硬件结构简单、工作可靠、测量误差小等特点。因此,它不仅可用于移动机器人,还可用在其它检测系统中。
思考:至于为什么接收不用晶体管做放大电路呢,因为放大倍数搞不好,集成放大电路,还带自动电平增益控制,放大倍数为76dB,中心频率是38k到40k,刚好是超声波传感器的谐振频率 。
参考文献
1. Fox, J.D., Khuri-Yakub, B.T. and Kino, G.S., "High Frequency Acoustic Wave Measurement in Air", in Proceedings of IEEE 1983 Ultrasonic Symposium, October 31-2 November, 1983, Atlanta, GA, pp. 581-4.
2. Martin Abreu, J.M., Ceres, R. and Freire, T., "Ultrasonic Ranging: Envelope Analysis Gives Improved Accuracy", Sensor Review, Vol. 12 No. 1, 1992, pp. 17-21.
3. Parrilla, M., Anaya, J.J. and Fritsch, C., "Digital Signal Processing Techniques for High Accuracy Ultrasonic Range Measurements", IEEE Transactions: Instrumentation and Measurement, Vol. 40 No. 4, August 1991, pp. 759-63.
4. Canali, C., Cicco, G.D., Mortem, B., Prudenziati, M., and Taron, A., "A Temperature Compensated Ultrasonic Sensor Operating in Air for Distance and Proximity Measurement", IEEE Transaction on Industry Electronics, Vol. IE-29 No. 4, 1982, pp. 336-41.
5. Martin, J.M., Ceres, R., Calderon, L and Freire, T., "Ultrasonic Ranging Gets Thermal Correction", Sensor Review, Vol. 9 No. 3, 1989, pp. 153-5.
-
毕业论文标准格式及范文
标准论文格式一1题目应能概括整个论文最重要的内容言简意赅引人注目一般不宜超过20个字论文摘要和关键词2论文摘要应阐述学位论文的主要…
-
论文标准格式范文
试论现代信息技术条件下高校两课教师角色的转变(辽宁大学外国语学院辽阳111000)内容提要:深化两课改革必须解决两课教学方法的科学…
-
标准论文格式+要求+范文(超全)
标准论文格式一1题目应能概括整个论文最重要的内容言简意赅引人注目一般不宜超过20个字论文摘要和关键词2论文摘要应阐述学位论文的主要…
-
标准论文格式范文
标准论文格式范文目录摘要21引言311问题提出312相关概念4121校际协作学习4122支持工具42文献综述43研究设计731研究…
-
本科毕业论文格式范文标准格式
XX大学本科生毕业论文题目学生姓名指导老师学院专业班级完成时间XXXXX方面探析XXXXXXXXX学院20xx年6月XX大学毕业论…
-
机电一体化专业毕业论文范文
机电一体化专业毕业论文范文一课题的来源及现实意义数控机床毕业设计是机电一体化专业的学生必须要经历的一个重要的实践环节通过本环节的锻…
-
单片机毕业设计开题报告范文
本科毕业论文(设计)开题报告与指导记录过程题目:基于89C51单片机红外传输的设计学生姓名:..专业:..入学时间:07年9月导师…
-
单片机类毕业设计,论文范文,毕业论文参考选题表
毕业论文参考选题表1基于单片机的无线数据收发器的设计字数10701页数361282基于AT89S52的无线测温报警器设计与实现字数…
-
单片机论文格式范文
学号:基于51单片机的电子时钟设计分院电子信息工程学院专业名称电子信息科学与技术班级0601姓名指导教师20##年5月12日摘要随…
-
单片机毕业设计论文
湖南纺织工大学湘潭技师学院毕业设计(论文)报告题目电动机单片机控制系统的研究系别:电气系.专业:机电一体化班级:09C3*****…