机械工程学报论文投稿模板
轮式移动机器人运动学建模方法 (二号黑体)
常 勇1, 2 马书根1, 3 王洪光1 谈大龙1 (四号仿宋)
(1. 中国科学院沈阳自动化研究所机器人学国家重点试验室 沈阳 110016;
(五号宋体,文中数字和字母为Times New Roman)
2. 中国科学院研究生院 北京 100039;
3. 日本立命馆大学机器人系 滋贺 525-8577 日本)
摘要(小五黑体):研究轮式移动机器人运动学建模方法问题。提出用于不规则地形下的轮式移动机器人运动学建模方法——轮心建模法 (Wheel-center modeling, WCM)在分析多刚体链式结构运动的速度特性以及不规则地形上轮式移动机构转动角速度特性的基础上,建立车轮轮心速度的矢量表达式,即确立WCM。以六轮摇臂转向架月球漫游车的运动学建模为例,分析各关节转动角速度矢量在车体坐标系下的投影,并根据转动矢量方向在车体坐标系中变化与否,将矢量叉乘的投影写成不同的形式,利用车轮轮心坐标系、轮地接触坐标系相对于车体中心坐标系的齐次变换矩阵中的相应元素,将车轮轮心的速度矢量表达式投影到车体中心坐标系下,建立车体运动学模型,从中阐述WCM的方法和过程,并分析WCM的特点。用试验和仿真验证该建模方法的正确性。(小五宋体,摘要长度300~500字)
关键词(小五黑体):双层辉光 人工神经网络 预测模型(小五宋体)
中图分类号(小五黑体):TG156(小五Times New Roman)
*
Research on ANN-based Prediction Model Used to Double Glow Plasma
Surface Alloying Processing(小三)
CHANG(姓大写) Yong1, 2 XXX Xxxxxx 1, 3 XXX Xxxxxx1 XXX Xxxxxx1(小四)
(1. State Key Laboratory of Robotics, Shenyang Institute of Automation,
Chinese Academy of Sciences, Shenyang 110016;
2. Graduate School, Chinese Academy of Sciences, Beijing 100039;
3. Department of Robotics, Ritsumeikan University, Shiga-ken 525-8577, Japan) (五号)
Abstract(小五黑体):The kinematic modeling method for a wheeled mobile robot is studied. A modeling method called wheel-center modeling (WCM) for kinematics of a wheeled mobile robot that moves on uneven terrain is presented. The vector expression of wheel center velocity is derived based on the analysis of the velocity characteristic of a multi rigid chain’s locomotion and the wheel-model moving mechanism’s moving on uneven terrain. The method of WCM is introduced as a result. The projection of the angular velocity of the rotary joints in the rover centre frame is analysed and the projection of vector cross product is expressed as different forms according to whether the direction of the angular velocity relatively to rover centre frame changes or not. The wheel centre velocity is projected to the rover body centre coordinate frame with the use of the elements of the homogeneous transformations from the wheel centre frame and the wheel-terrain contact frame to the rover center frame. Thus, the kinematics of the rover is modelled. The procedure of kinematic modelling using WCM is introduced and the characters of WCM is analysed. The method’s validity is verified by experiment and simulation. (小五)
Key words(小五黑体):Double glow Artificial neural network Prediction model
0 前言(四号宋体)
(五号宋体)离散频谱分析只能在截断的有限? 国家自然科学基金资助项目(7150080050)。xxxxxxxx收到初稿,
xxxxxxxx收到修改稿(六号宋体,此处为角注,和正文分开) 长度时域上进行,不可避免地存在能量泄漏,导致经过快速傅里叶变换(Fast Fourier transform,FFT)得到的频谱,其频率、幅值和相位均可能产生较大的误差,大大限制了该技术的工程应用,因此需要研究离散频谱的校正技术以消除或大幅度减小这个误差,提高分析精度。对于单频率成分或间隔较远
的多频率成分的离散频谱,目前主要有比值法、能量重心法、FFT+FT连续细化傅里叶变换分析法和相位差法四种校正方法[1],其中能量重心法是20xx年丁康等[2]
在三点卷积幅值校正法基础上提出来的一种通用的离散频谱校正方法,利用离散窗谱函数的能量重心是坐标原点的原理求出频率校正量,是
一种校正精度很高的近似方法。
在实际工程应用中所测得的信号通常伴随有噪声,噪声会影响频谱校正精度。因此从理论上系统的分析随机噪声背景下的各种离散频谱校正方法的
精度,可为实际工程应用中提供理论依据,具有重要的指导意义。19xx年SCHOUKENS等[3-4]研究了噪声对内插法的影响。20xx年齐国清等[5]对插值
FFT估计的频率精度进行了分析。20xx年朱利民 等[6]对一种特定时域平移相位差校正法(平移点数等于FFT变换点数)的校正精度的影响进行了理论
分析和仿真计算。20xx年杨志坚等[7-8]
对高斯白噪
声背景下时移相位差校正法和改变窗长相位差法校
正精度进行了理论分析和仿真计算。目前还没有学
者对噪声背景下能量重心法频率校正精度进行过系
统分析。能量重心法是一种通用的校正方法,能对多段平均功率谱直接进行校正,特别适用于频率有
微小波动的实际工况,在实际工程中得到很广泛的应用[9-10]
,因此分析噪声背景下能量重心法校正精
度有重要的意义。本文首先对高斯白噪声影背景下
加对称窗的离散频谱利用能量重心校正法进行校正 的频率校正精度进行了理论分析,推导其理论校 正误差公式,进行了仿真验证,并且对能量重心 法做了改进,使其具有更广的适用性和更高的抗噪能力。 1 试验方法和试验方案(四号宋体)
1.1 试验方法 渗金属试验在自制双层辉光离子渗金属炉中进行,源极材料为Hastelloy C—2000合金,尺寸为130 mm×50 mm×4 mm,工件材料为20钢,尺寸为80 mm×25 mm×3 mm。采用脉冲放电模式:源极采用直流电源,工件采用脉冲电源。源极材料Hastelloy C—2000的质量分数:wNi=59%,wMo=16%,wCr=23%,wCu=1.6%,wC<0.01%。 1.2 试验方案(五号黑体) 为了选定正交试验各个工艺参数的取值范围,先结合以往试验研究的经验,然后又进行了20余炉的摸索性试验,确定了正交工艺参数。正交试验按
照L16(45)正交表进行试验。指标项目为渗层表面合
67
金元素成分及总质量分数、渗层厚度和吸收率。因素水平表如表1所示。 表1 因素水平表(小五黑体)
水平
因素(六号宋体)
1 2 3 4
源极电压U/V 1 050 1 000 950 900 工件电压U/V
275 250 350 300 气压p/Pa
35 30 45 40 极间距d/mm 15 20 25 22.5 1.3 频率校正误差理论分析 没有噪声影响下的能量重心校正法的归一化频
率校正公式[2]
n
(k*?i)G
1?f??nk*?ik*?inn?? (1) Gi???n
k*?i式中 k* ——无噪声功率谱中最大值谱线 Gk*?i—
—第k*?i条功率谱线 在白噪声背景下的归一化频率校正公式 ?n(k f?r?i)Pk??nr?i
1kr?inn?? (2) Pkr?ii???n
式中 kr ——白噪声背景下功率谱中最大值谱线
Pkr?i ——第kr?i条功率谱线
2 数学模型 在网络学习部分,采用三层BP神经网络来完
成函数的映射。误差逆传播神经网络是一种具有三层或三层以上的阶层型神经网络。图1为一个三层前馈神经网络:它包括输入层、隐含层(中间层)、
输出层;输入层有i个节点,隐含层有j 个节点,
输出层有t个节点。上、下层之间各神经元实现全连接,即下层的每一单元与上层的每一单元都实现权连接,而每层各神经元之间无连接。网络按有教师示教的方式进行学习,当一对学习模式提供给网络后,神经元激活值从输入层经各中间层向输出层传播,在输出层的各神经元获得网络的输入响应。这以后,按减小希望输出与实际输出之间误差的方向,从输出层经各中间层逐层修正各连接权值,最
后回到输入层。 算法步骤如下所述。 (1) 设置初始权系w(0)为较小的随机非零值。
68
(2) 给定输入/输出样本对,计算网络的输出: 设第p组样本输入、输出分别为
up=(u1p,u2p,…,unp) dp=(d1p,d2p,…,dnp) p=1,2,…,L
节点i在第p组样本输入时,输出为
0.9。
?
yip?f[xip(t)]?f??wij(t) Ι
?
jp? (3)
??j??
式中,IjP为在第p组样本输入时,节点i的第j个输
入。
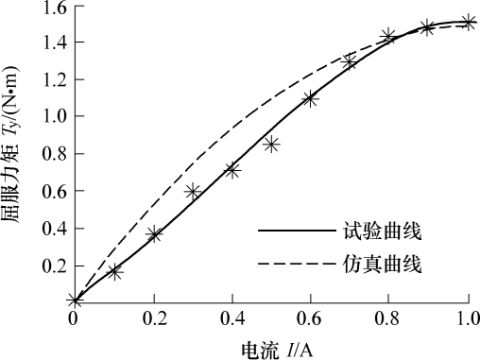
图1 阻尼器屈服力矩—电流特性(图中文字为六号)
f是激励函数,采用Sigmoid型,即
f(x)?
1
1?exp(x)
(4) 可由输入层经隐层至输出层,求得网络输出层节点的输入。
(3) 计算网络的目标函数J。设Ep为在第p组样本输入时网络的目标函数,取L2范数,则
E12y21??
212
p(t)?dp?p(t) 3?2? dkp?ykp(t) ?2?ekp (t)
kk
(5)
式中,ykp(t)为在第p组样本输入时,经t次权值调整网络的输出,k是输出层第k个节点。
网络的总目标函数为 J(t)??EP(t)
(6) p
作为对网络学习状况的评价。
判别: 若J <?,则算法结束,否则,至步骤(4)。 (4) 反向传播计算。由输出层,依据J按“梯度下降法”反向计算,逐层调整权值(图3~5)。 wij(t?1)?wij(t)?η
?J(t)
?w?wij(t)? ij(t)
η?
?Ep(t)?w?wij(t)
(8)
p
ij(t)
?wij(t)?式中,?为步长或称为学习率,n取1 000 000,?取
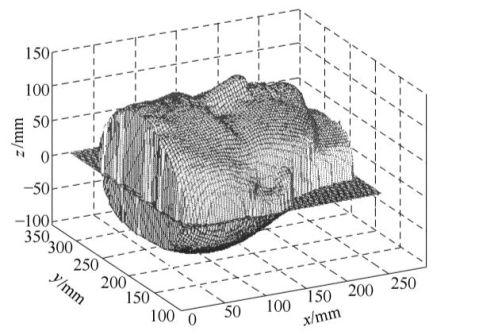
图2 路径规划三维图(小五宋体)
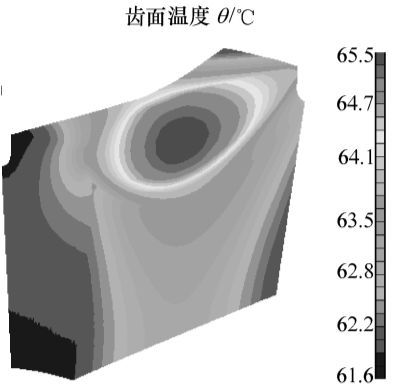
图3 轮齿本体温度分布
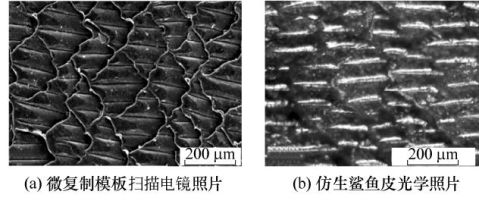
图4 微压印法制备的微复制模板及仿生鲨鱼皮
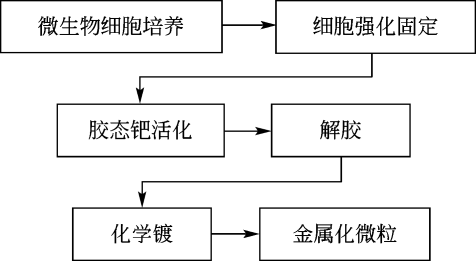
图5 微生物细胞金属化约束成形工艺流程
3 计算结果与比较
为检验程序的可靠性与实用性,同时又具有一定的推广能力,在正交试验16组数据中选择13组作为训练样本,余下的3组以及正交优化工艺作为
69
检测样本。经过1 000 000次训练的试验数据与计算结果的比较见表2、表3。
表2 预测渗层表面的成分
编号 5 预测值 12 预测值 16 预测值 17 预测值
质量分数w/%
Ni Cr Mo Cu 49.881 51.734 50.514 51.171 50.290 50.826 57.168 59.891
14.695 16.962 16.691 17.509 19.164 18.104 19.655 20.107
11.365 11.211 14.071 13.048 6.480 7.8130 14.732 12.163
1.605 1.661 0.912 0.415 1.308 1.333 1.353 1.403
对双层辉光离子多元共渗工艺参数:源极电压、工件电压、极间距、气压对渗层表面的合金元素总质量分数、渗层厚度、各合金元素质量分数、吸收率(工件增重/源网络训练准确可靠),正交试验按照L16(45)正交表进行试验。指标项目为渗层表面合金元素成分及总质量分数、渗层厚度和吸收率。从表2、表3可以看出训练样本和检测样本的网络实际输出值与期望值都很接近,说明应用神经网络描述双层辉光离子渗金属工艺参数与渗层的表面合金成分和合金总质量分数、渗层厚度、吸收率之间的映射模型是十分有效的。
表3 人工神经网络训练与预测值
试验编号 1 2 3 4 5* 17*
源极电压 工件电压 U∕V U∕V
1 1 1 1 2 1
1 2 3 4 1 2
极间距 d∕mm 1 2 3 4 2 1
气压 p∕Pa 1 2 3 4 3 1
吸收率s∕%
试验值 预测值 70.900 70.587 61.200 60.871 33.330 32.847 44.650 44.401 48.100 47.753 79.340 80.920
渗层厚度δ∕μm 试验值 预测值
34.5 34.579 36.5 36.380 19.0 19.245 21.0 20.871 25.5 24.950 38.0 38.459
元素总质量分数w∕% 试验值 预测值
87.496 87.437 89.796 89.237 84.895 84.508 77.579 77.321 77.546 76.796 92.908 92.210
注:*为检测样本值,试验编号17为正交优化工艺。(六号宋体)
[3] DOWIET P. Estimation of disassembly times[R].
4 结论
(1) 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
。。。。。
(2) 。。。。。。。 (3) 。。。。。。 (4) 。。。。。。。
参 考 文 献(五号黑体)
(以下参考文献为作者参考格式用,和文中引用的文
献不符)
[1] IMLACH J, BLAIR B J, ALLAIRE P. Measured and
predicted force and stiffness characteristic of industrial magnetic bearings[J]. Trans. ASME J. Tribol., 1991, 113:784-788. (参考文献为期刊的格式)
[2] 朱祖超. 超低比转速高速离心泵的理论研究及工程实现
[J].机械工程学报,2000,36(4):30-33. (括号里是期不是卷,有些期刊有期和卷,有些只有一种,就只写一种)
ZHU Zuchao. Theoretical study and engineering implementation of super-low-specific-speed highspeed centrifugal pumps[J]. Chinese Journal of Mechanical Engineering, 2000,36(4):30-33. 非英文的参考文献采用非英文、英文双语形式
Manchester:Manchester Metropolitan University,1994. (参考文献为报告的格式)
[4] TULLY E J, HEYWOOD J B. Lean-burn charracteristics of
a gasoline engine enriched with hydrogen fraction from a plasmatron fuel reformer[R]. SAE 2003-01-0630, 2003. [5] DAVID C, MEEKER E H, MYOUNGYU D N. Anaugment
anaugmented currents model for magnetic bearings force and linearized parameters of radial active magnetic including eddy currents, fringing, and leakage[J]. IEEE Trans. on Magn. , 1996, 32(4):3 219-3 227.
[6] CHAAN T H, CHEN S L. Exact linearization of a
voltage-controlled 3-pole active magnetic bearing system[J]. IEEE Trans. Contr. Syst. Technol., 2002, 10(4):618-625. [7] Online Computer Aid library Center, Inc. History of
OCLC[EB/OL]. [2000-01-08]. http://www.oclc.….htm. (参考文献为在线电子文献的格式)
[8] FOURNEYEYN M E. Advancing into tholographical
photoelasticity[C]// American Society of Mechanical Engineers. Applied Mechanics Division. Symposium on Applications of Holography in Mechanics,August 23-25,1971,University of Southern California,Los Angeles,California. New York:ASME,1971:17-38.(参考文献为会议文献的格式)
[9] BAUER M D,SIDDIQUE Z,ROSEN D W. Virtual
2
prototyping in simultaneous product/process design for Disassembly[M]. London:Chapman Hall,1997. (参考文献为图书的格式)
[10] 严长征. 盾构隧道近距离共同作用机理及施工技术研
究[D]. 上海:同济大学,2007. (参考文献为学位论文的格式)
YAN Changzheng. Research on the mechanism and
construction techniques of interaction for adjacent tunneling preformed by shield[D]. Shanghai:Tongji University,2007.
[11] 李华,姚进. 高效液力变矩传动系统:中国,
ZL200810044340.9[P]. 2008-10-01. (参考文献为专利的格式)
LI Hua,YAO Jin. High-efficiency hydraulic torque-
converting transmission system:China ZL200810044340. 9[P]. 2008-10-01.
作者简介(六号黑体):XXX (通信作者),男,19xx年出生,博士研究生,主要研究方向为表面改性方面的研究。(六号)
E-mail:cjaaa@mail.
XXX,男,19xx年出生,博士,教授,博士研究生导师。主要研究方向为表面改性方面的研究。
E-mail:bbbbb@mail.
-
机械工程师职称论文写作技巧
机械工程师职称论文写作技巧机械工程师是工程师的一种职业,是专业从事机械行业的人士,今天本文说的机械工程师值得是职称,是中级的职称。…
-
机械工程师论文范文:加强建筑工程机械行业管理初探
机械工程师论文范文加强建筑工程机械行业管理初探摘要针对建筑工程机械行业通过分析该行业目前的管理现状总结出加强机械行业管理应采取的措…
-
机械工程师简历范文
机械工程师简历范文日期20xx0309来源作者字体大中小姓名出生19xx713日期国籍政身高貌教育程本科毕业时20xx年7月治17…
-
机械工程师职称论文代发写作技巧
机械工程师职称论文代发写作技巧机械工程师是工程师的一种职业是专业从事机械行业的人士今天小编说的是机械工程师中级职称的论文写作技巧它…
-
机械工程师工作总结范文
时光荏苒岁月如梭20xx年已在不经意间悄然逝去回首20xx既有收获的踏实和欢欣也有因不足带来的遗憾和愧疚20xx年是公司大发展的一…
-
机械工程师职称论文写作技巧
机械工程师职称论文写作技巧机械工程师是工程师的一种职业,是专业从事机械行业的人士,今天本文说的机械工程师值得是职称,是中级的职称。…
-
机电工程系实习报告_范文
参考机电工程系实习报告范文了三年的大学然而大多数人对本专业的认识还是不够所以对本专业掌握并不是很理想今年暑假学院为了使我们更多了解…
-
电子信息工程毕业论文范文
电子系统设计课程设计报告设计课题:简易电阻电容和电感测试仪的设计专业班级:姓名:学号:设计时间:评阅意见物理与机电工程学院简易电阻…
-
机电工程系实习报告_范文
免费机电工程系实习报告范文了三年的大学然而大多数人对本专业的认识还是不够所以对本专业掌握并不是很理想今年暑假学院为了使我们更多了解…
-
工程机械毕业论文范例
吉林交通职业技术学院毕业论文工程机械设备的管理系别专业工程机械运用与维护班级工程机械系09304班姓名范洋洋学号GJ0930408…