控制系统仿真实验二报告
实验二 面向结构图的仿真
四 思考题
(1)在未考虑调节阀饱和特性时,讨论一下两个水箱液位的变化情况,工业上是否允许?讨论阀位的变化情况,工业上是否能实现?
答:在一开始阀位大开,H1,H2液位上升迅速,很快就达到预期值。但显然不能在工业上实现。阀位有其本身的最大最小的限制,在仿真中出现的超过100%的情况在现实生活中不可能出现,因此这一部分对应的控制效果也是无效的。
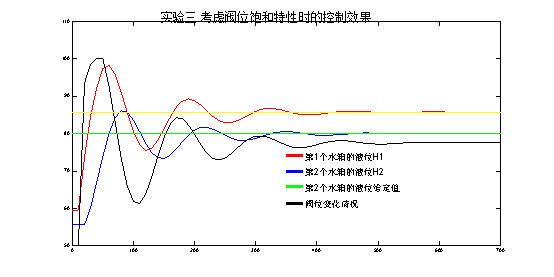
(2)与实验三相比,考虑调节阀饱和特性前后,响应有何不同?
答:H1 H2的液位在考虑饱和特性之后,响应曲线比不考虑的时候略微平缓一些。
第一部分 线性系统仿真
一 实验目的
1. 掌握理解控制系统闭环仿真技术。
2. 掌握理解面向结构图的离散相似法的原理和程序结构。
3. 掌握 MATLAB 中C2D 函数的用法,掌握双线性变换的原理。
二 实验内容
根据上面的各式,编写仿真程序,实现无扰动时给定值阶跃仿真实验
1. 取K P = 1.78 ,T i = 85 sT = 10s,ΔH2 S =H2set_ percent = 80, ΔQ d = 0,
tend = 700,进行仿真实验,绘制响应曲线。
clc
clear all
A=2;
ku=0.1/0.5;
H10=1.5;
H20=1.4;
alpha12 = 0.25/sqrt(H10);
alpha2 = 0.25/sqrt(H20);
R12=2*sqrt(H10)/alpha12;
R2=2*sqrt(H20)/alpha2;
H1SpanLo=0;
H2SpanLo=0;
H1SpanHi=2.52;
H2SpanHi=2.52;
Kp=1.78;
Ti=85;
R12*A
R12
ad = 1/(A*R12);
a1 = 1/(A*R12);
a2 = 1/(A*R2);
Kc=Kp/Ti;
bc=Ti;
Kd = 1/A;
K1 = ku/A;
K2 = 1/(A*R12);
uc(1)=0;ud(1)=0;u1(1)=0;u2(1)=0;
xc(1)=0;xd(1)=0;x1(1)=0;x2(1)=0;
yd(1)=0;yc(1)=0;y1(1)=0;y2(1)=0;
nCounter = 70;
T=10;
k=1;
deltaQd=0;
H20_percent=(H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100;
H2=80;
tend = nCounter*T;
for t=T:T:tend
k=k+1;
uc(k)= (H2 - (y2(k-1)+H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100)/100;
ud(k)=deltaQd;
u1(k)=yc(k-1);
u2(k)=y1(k-1);
xc(k) = xc(k-1) + Kc*T*uc(k-1); yc(k)=xc(k)+bc*Kc*uc(k);
xd(k) = exp(-ad*T)*xd(k-1) + Kd/ad*(1-exp(-ad*T))*ud(k);yd(k)=xd(k);
x1(k) = exp(-a1*T)*x1(k-1) + K1/a1*(1-exp(-a1*T))*u1(k);y1(k)=x1(k);
x2(k) = exp(-a2*T)*x2(k-1) + K2/a2*(1-exp(-a2*T))*u2(k);y2(k)=x2(k);
end
Hlevel(:,1)=(y1+H10-H1SpanLo)/(H1SpanHi-H1SpanLo)*100;
Hlevel(:,2)=(y2+H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100;
yc=(yc+0.5)*100;
y2sp=H2*ones(size(y1'));
yv=yc;
textPositionH1=max(Hlevel(:,1));
textPositionH2=max(Hlevel(:,2));
H2Steady=Hlevel(size(Hlevel(:,1),1),1)*ones(size(y1'));
xmax=max(0:T:tend);
xmin=0;
ymax=110;
ymin=50;
scrsz = get(0,'ScreenSize');
gca=figure('Position',[5 10 scrsz(3)-10 scrsz(4)-90]);
%gca=figure('Position',[5 10 scrsz(3)/2 scrsz(4)/1.5])
set(gca,'Color','w');
plot(0:T:tend,Hlevel(:,1),'r','LineWidth',2)
hold on
plot(0:T:tend,Hlevel(:,2),'b','LineWidth',2)
hold on
plot(0:T:tend,yv,'k','LineWidth',2)
hold on
plot(0:T:tend,y2sp,'g','LineWidth',2)
hold on
plot(0:T:tend,H2Steady,'y','LineWidth',2)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/10 (ymax-ymin)/2+ymin-(ymax-ymin)/10],'Color','r','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/10,' 第一个水箱的液位H1','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/6 (ymax-ymin)/2+ymin-(ymax-ymin)/6],'Color','b','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/6,' 第二个水箱的液位H2','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/4.2 (ymax-ymin)/2+ymin-(ymax-ymin)/4.2],'Color','g','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/4.2,' 第二个水箱的液位给定值','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/3.2 (ymax-ymin)/2+ymin-(ymax-ymin)/3.2],'Color','k','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/3.2,'阀位变化情况','FontSize',16)
axis([xmin xmax ymin ymax]);
text(tend/5,ymax+1.5,' 实验二 不考虑阀位饱和特性时的控制效果','FontSize',22)
grid

2. 用 MATLAB 求出从输入到输出的传递函数,并将其用c2d 函数,利用双线性变换法转
换为离散模型,再用dstep()函数求离散模型的阶跃响应,阶跃幅值为3。
clc
clear all
A=2;
ku=0.1/0.5;
H10=1.5;
H20=1.4;
alpha12 = 0.25/sqrt(H10);
alpha2 = 0.25/sqrt(H20);
R12=2*sqrt(H10)/alpha12;
R2=2*sqrt(H20)/alpha2;
H1SpanLo=0;
H2SpanLo=0;
H1SpanHi=2.52;
H2SpanHi=2.52;
Kp=1.78;
Ti=85;
R12*A
R12
ad = 1/(A*R12);
a1 = 1/(A*R12);
a2 = 1/(A*R2);
Kc=Kp/Ti;
bc=Ti;
Kd = 1/A;
K1 = ku/A;
K2 = 1/(A*R12);
numc=[Kc*bc,Kc];% 用 MATLAB 求出从输入到输出的传递函数,
denc=[1];
num1=[K1];
den1=[1,a1];
num2=[K2];
den2=[1,a2];
gc=tf(numc,denc);
g1=tf(num1,den1);
g2=tf(num2,den2);
Sysq=gc*g1*g2;
SysG=feedback(Sysq,1);
gg=c2d(SysG,10,’tustin’);% 用c2d 函数,利用双线性变换法转
换为离散模型
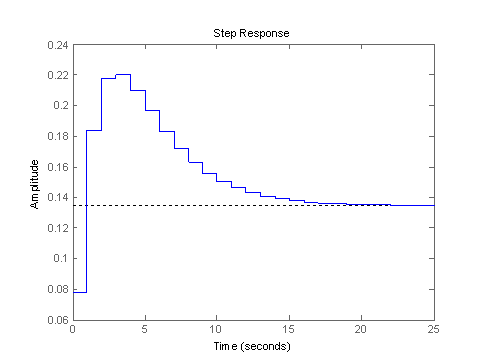
dstep(3*gg.num{1},gg.den{1});%用dstep()函数求离散模型的阶跃响应,阶跃幅值为3
结果
三 实验报告
实验完成后,要写出实验报告,内容包括:
1.实验步骤及说明;
2.实验所用的仿真程序清单,以及程序结构的简单说明;
第二部分 含有非线性环节的控制系统仿真
一 实验目的
4. 掌握理解控制系统闭环仿真技术。
5. 掌握理解面向结构图的离散相似法的原理和程序结构。
6. 掌握理含有非线性环节的控制系统的仿真方法。
二 实验内容
根据上面的各式,编写仿真程序,实现无扰动时给定值阶跃仿真实验
1. 取K P = 1.78 ,T i = 85 sT = 10s,ΔH2 S =H2set_ percent = 80, ΔQ d = 0,
tend = 700,进行仿真实验,绘制响应曲线。
clc
clear all
A=2;
ku=0.1/0.5;
H10=1.5;
H20=1.4;
alpha12 = 0.25/sqrt(H10);
alpha2 = 0.25/sqrt(H20);
R12=2*sqrt(H10)/alpha12;
R2=2*sqrt(H20)/alpha2;
H1SpanLo=0;
H2SpanLo=0;
H1SpanHi=2.52;
H2SpanHi=2.52;
Kp=3.91/2.2;;
Ti=0.85*100;
%Kp=3.21;
%Ti=99999999999999;
ad = 1/(A*R12);
a1 = 1/(A*R12);
a2 = 1/(A*R2);
Kc=Kp/Ti;
bc=Ti;
Kd = 1/A;
K1 = ku/A;
K2 = 1/(A*R12);
uc(1)=0;uv(1)=0;ud(1)=0;u1(1)=0;u2(1)=0;
xc(1)=0;xv(1)=0;xd(1)=0;x1(1)=0;x2(1)=0;
yc(1)=0;yv(1)=0;yd(1)=0;y1(1)=0;y2(1)=0;
nCounter = 70;
T=10;
k=1;
deltaQd=0;
c=0.5;
H20_percent=(H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100;
H2set_percent=80;
tend = nCounter*T;
for t=T:T:tend
k=k+1;
uc(k)= (H2set_percent - (y2(k-1)+H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100)/100;
uv(k)=yc(k-1);
ud(k)=deltaQd;
if uv(k)>c
yv(k)=c;
end
if uv(k)<-c
yv(k)=0;
end
if uv(k)<=c & uv(k)>=-c
yv(k)=uv(k);
end
u1(k)=yv(k);
u2(k)=y1(k-1);
xc(k) = xc(k-1) + Kc*T*uc(k-1); yc(k)=xc(k)+bc*Kc*uc(k);
xd(k) = exp(-ad*T)*xd(k-1) + Kd/ad*(1-exp(-ad*T))*ud(k);yd(k)=xd(k);
x1(k) = exp(-a1*T)*x1(k-1) + K1/a1*(1-exp(-a1*T))*u1(k);y1(k)=x1(k);
x2(k) = exp(-a2*T)*x2(k-1) + K2/a2*(1-exp(-a2*T))*u2(k);y2(k)=x2(k);
end
Hlevel(:,1)=(y1+H10-H1SpanLo)/(H1SpanHi-H1SpanLo)*100;
Hlevel(:,2)=(y2+H20-H2SpanLo)/(H2SpanHi-H2SpanLo)*100;
yv=(yv+0.5)*100;
y2sp=H2set_percent*ones(size(y1'));
textPositionH1=max(Hlevel(:,1));
textPositionH2=max(Hlevel(:,2));
H2Steady=Hlevel(size(Hlevel(:,1),1),1)*ones(size(y1'));
xmax=max(0:T:tend);
xmin=0;
ymax=110;
ymin=50;
scrsz = get(0,'ScreenSize');
gca=figure('Position',[5 10 scrsz(3)-10 scrsz(4)-90])
%gca=figure('Position',[5 10 scrsz(3)/2 scrsz(4)/1.5])
set(gca,'Color','w');
plot(0:T:tend,Hlevel(:,1),'r','LineWidth',2)
hold on
plot(0:T:tend,Hlevel(:,2),'b','LineWidth',2)
hold on
plot(0:T:tend,yv,'k','LineWidth',2)
hold on
plot(0:T:tend,y2sp,'g','LineWidth',2)
hold on
plot(0:T:tend,H2Steady,'y','LineWidth',2)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/10 (ymax-ymin)/2+ymin-(ymax-ymin)/10],'Color','r','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/10,' 第一个水箱的液位H1','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/6 (ymax-ymin)/2+ymin-(ymax-ymin)/6],'Color','b','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/6,' 第二个水箱的液位H2','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/4.2 (ymax-ymin)/2+ymin-(ymax-ymin)/4.2],'Color','g','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/4.2,' 第二个水箱的液位给定值','FontSize',16)
line([tend/2 tend/2+27],[(ymax-ymin)/2+ymin-(ymax-ymin)/3.2 (ymax-ymin)/2+ymin-(ymax-ymin)/3.2],'Color','k','LineWidth',6)
text(tend/2+27,(ymax-ymin)/2+ymin-(ymax-ymin)/3.2,'阀位变化情况',16)
axis([xmin xmax ymin ymax]);
text(tend/5,ymax+1.5,'实验三 考虑阀位饱和特性时的控制效果','FontSize',22)
grid
四 实验报告
实验完成后,要写出实验报告,内容包括:
1.实验步骤及说明;
3.实验所用的仿真程序清单,以及程序结构的简单说明;
-
控制系统仿真实验二报告
实验二面向结构图的仿真四思考题1在未考虑调节阀饱和特性时讨论一下两个水箱液位的变化情况工业上是否允许讨论阀位的变化情况工业上是否能…
-
控制系统仿真实验报告
控制系统仿真实验报告一实验目的进一步掌握数值积分法进一步掌握MATLAB软件的使用方法二实验设备数字计算机MATLAB软件三实验预…
-
控制系统仿真实验报告 (2)
昆明理工大学电力工程学院学生实验报告实验课程名称控制系统仿真实验开课实验室年月日实验一电路的建模与仿真一实验目的1了解KCLKVL…
-
控制系统仿真实验报告
附件四学生实验报告表头格式昆明理工大学电力工程学院学生实验报告实验课程名称开课实验室年月日实验一电路的建模与仿真一实验目的1了解K…
-
MATLAB与控制系统仿真实验报告
MATLAB与控制系统仿真实验报告20xx20xx学年第1学期专业班级学号姓名实验三MATLAB图形系统一实验目的1掌握绘制二维图…
- 过程控制系统实验报告
-
控制系统仿真实验报告
控制系统仿真实验报告一实验目的进一步掌握数值积分法进一步掌握MATLAB软件的使用方法二实验设备数字计算机MATLAB软件三实验预…
-
控制系统仿真实验报告 (2)
昆明理工大学电力工程学院学生实验报告实验课程名称控制系统仿真实验开课实验室年月日实验一电路的建模与仿真一实验目的1了解KCLKVL…
-
机器人控制-数码管动态显示-仿真实验报告
机器人控制课程总结报告机器人控制仿真实验二数码管动态显示姓名李铃年级20xx级系别信息工程学院计科师学号1111000048同组人…
-
控制系统计算机仿真-实验五
实验五采样控制系统的数字仿真实验一实验目的1掌握采样控制系统数字仿真的特点2了解数字控制器对系统动态性能的影响3学会编制双重循环法…
-
成都理工大学数控机床仿真实验报告()
实验一数控车床操作加工仿真实验一实验目的1掌握手工编程的步骤2掌握数控加工仿真系统的操作流程二实验内容1了解数控仿真软件的应用背景…