控制系统仿真实验报告 (2)
实验一 电路的建模与仿真
一、实验目的
1、了解KCL、KVL原理;
2、掌握建立矩阵并编写M文件;
3、调试M文件,验证KCL、KVL;
4、掌握用simulink模块搭建电路并且进行仿真。
二、实验内容
电路如图1所示,该电路是一个分压电路,已知 ,
, ,
, 。试求恒压源的电流
。试求恒压源的电流 和电压
和电压 、
、 。
。
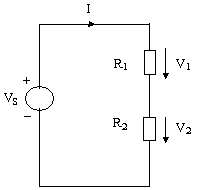
图1
三、列写电路方程
(1)用欧姆定律求出电流和电压
(2)通过KCL和KVL求解电流和电压
四、编写M文件进行电路求解
(1)M文件源程序
(2)M文件求解结果
五、用simulink进行仿真建模
(1)给出simulink下的电路建模图
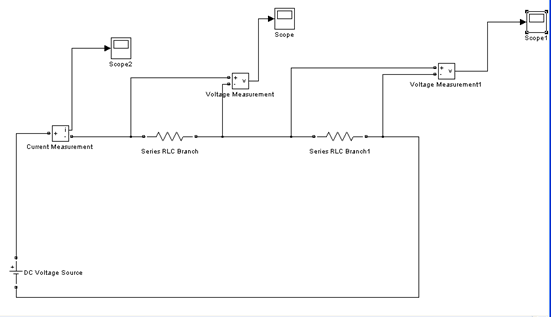
(2)给出simulink仿真的波形和数值
电流的波形
R2的电压波形
R1的波形
六、结果比较与分析
实验二 数值算法编程实现
一、实验目的
掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。
二、实验说明
1.给出拉格朗日插值法计算数据表;
2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据;
3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程;
4.调试和完善MATLAB程序;
5.由编写的程序根据实验要求得到实验计算的结果。
三、实验原始数据
上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算 ,写出程序源代码,输出计算结果:
,写出程序源代码,输出计算结果:

四、拉格朗日插值算法公式及流程框图
五、程序代码
六、计算结果
=
实验三 动态电路的建模及仿真
一、实验目的
1.了解动态电路的理论,掌握动态电路建模的基本原理;
2.熟悉MATLAB的Simulink模块,并掌握使用模块搭建过程。
二、实验说明
电力系统是一个大规模、时变的复杂系统,主要由发电、变电、输电、配电和用电等环节组成,在国民经济中占有非常重要的作用。动态过程是电力系统中的存在的常态结构形式,为了更好的理解动态过程的理论,掌握动态过程的物理本质,本实验利用MATLAB搭建一个包含RLC元件的简单动态系统,采用编程和数值模型仿真的方法分别进行分析计算,得出计算结果。
三、实验内容
电路如图2所示,该电路是一个RLC电路,已知 ,
, ,
, ,
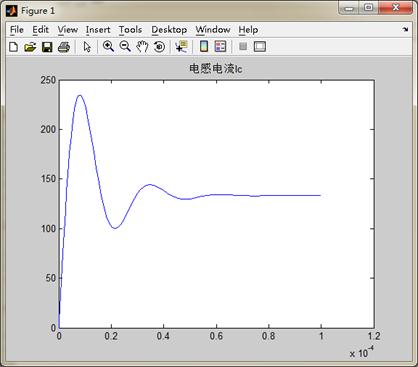
, 。试求电感的电流
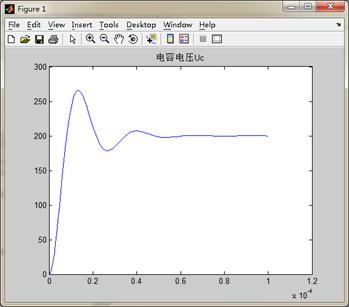
。试求电感的电流 和电容的电压
和电容的电压 。
。
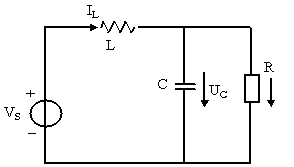
图2
四、编写M文件进行电路求解
(1)M文件源程序
(2)M文件求解结果
五、用simulink进行仿真建模
(1)给出simulink下的电路建模图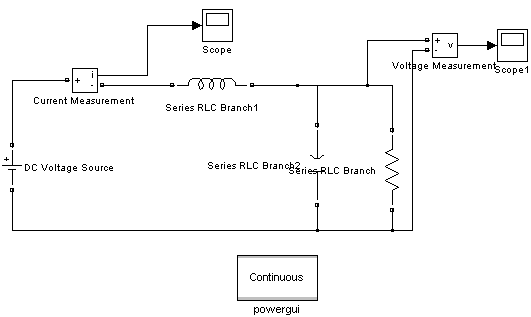
(2)给出simulink仿真的波形和数值
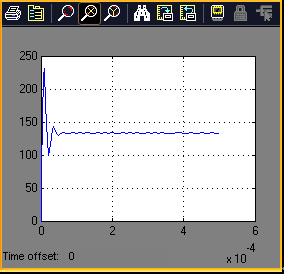
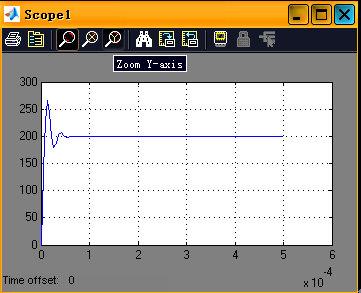
六、结果比较与分析
实验四 电力系统暂态稳定性的设计及仿真
一、实验目的
1、掌握简单电力系统暂态稳定性的方法;
2、并掌握使用模块搭建过程。
二、实验说明
电力系统遭受大干扰后,由于发电机转子上机械转矩与电磁转矩不平衡,使同步电机转子间相对位置发生变化,即发电机电势间相对角度发生变化,从而引起系统中电流、电压和电磁功率的变化。电力系统暂态稳定就是研究电力系统在某一运行方式,遭受大干扰后,并联运行的同步发电机之间是否能保持同步运行、负荷是否仍能正常运行的问题。
三、实验内容
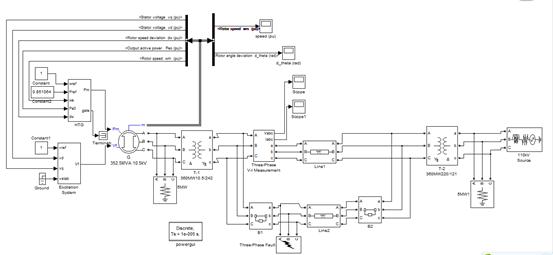
选取教材图6-6所示的单机无穷大系统,参数如例所示,分析在图示f点发生两相接地短路,通过线路两侧开关同时断开切除故障线路后,系统的暂态稳定性。
四、搭建电力系统仿真模型图
(1)给出仿真模型图
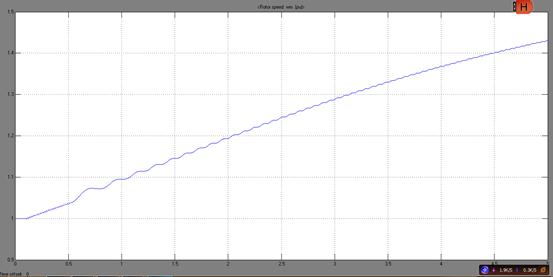
故障在0.2s后切除线路,发电机的转速变化曲线图:
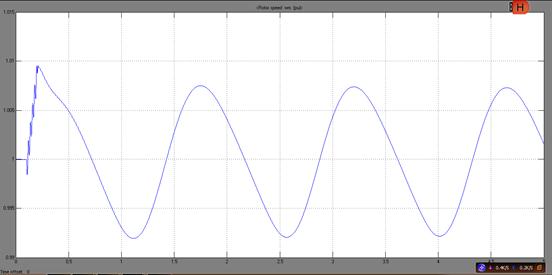
故障在0.55s后切除线路,发电机的转速变化曲线图:
(2)给出发电机功角与时间的特性曲线,分析极限切除故障的时间。
第二篇:控制系统CAD仿真实验报告
控制系统数字仿真与CAD实验报告

系 别 电子信息与电气工程系
专 业 自动化
班 级
姓名学号
指导老师 完成日期 2011-10-05
成绩评定
1.1实验内容
根据“二次模型”编写适当程序语句,使之能自动求解各环节变量的动态变
实验二 直流双闭环调速系统仿真
中文摘要
掌握SIMULINK工具分析设计电动机速度控制系统的方法,熟悉“晶闸管整流电动机调速”简称V-M调速系统,从而达到使得系统在电动机允许的过载能力下尽可能地快速启动,还可以使系统转速对于电网电压及负载转矩或突变等扰动予以迅速抑制,以恢复时间上达到最佳。
关键词:V-M调速;抗扰性能
Abstract
By acquiring SIMULINK tools analysis design motors speed control system methods , familiar with " crube motors machinery velocity modulation " short V-M machinery velocity modulation system , so as to achieve making system in electric motors overload permitted under capacity quickstart as much as possible . System will also make fast for power grid voltage and loading torque or mutations such disturbances be prompt check , to restore the time reached at best
KEY WORD:V-M machinery velocity modulation ;immunity performance
2.1实验内容
2.1.1建立双闭环调速系统的模型
系统中采用三相桥式晶闸管整流装置,基本参数如下:
直流电动机:220V,13.6A,1480r/min,Ce=0.131V/(r.min-1),允许过载倍数
1.5。
晶闸管装置:Ks=76
电枢回路总电阻:R=6.58Ω
时间常数:T1=0.018s,Tm=0.25s
反馈系数:α=0.00337V/(r.min-1)
β=0.4V/A
反馈滤波时间常数:τoi =0.005s,τon=0.005s
2.1.2利用Simulink建立仿真模型,并分析系统的动态性能
对于双闭环调速系统动态结构图分析可知:
ASR从起动到稳速运行的过程中经历了两个状态,即饱和限幅输出与线性调节状态;该过程只工作在一种状态,即线性调节状态;对于系统性能指标来说,启动过程中电流的超调量为5.3%,转速的超调量达26.8%。
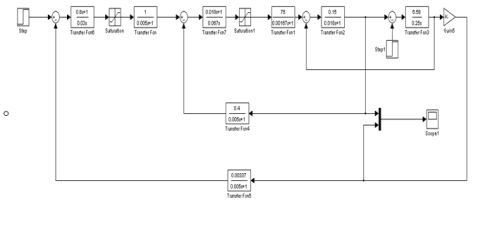
图2-1直流双闭环调速系统动态结构图
2.1.3抗扰性能分析
一般情况下,双闭环调速系统的干扰主要是突变负载与电网电压波动两种,通过实验仿真,可以得出以下结论:
1、系统对负载的大幅度突变具有良好的抵抗能力,在?I=12A的情况下系统速降为?n=70r/min,恢复时间tf=1.5s;
2、系统对电网电压的大幅度波动同样也具有良好的抵抗能力。在?U=100V的情况下,系统速降仅为28r/min,恢复时间tf=1.5s;
3、与理想的电动机的起动特性相比较,该系统的起动及恢复时间显得略长一些。
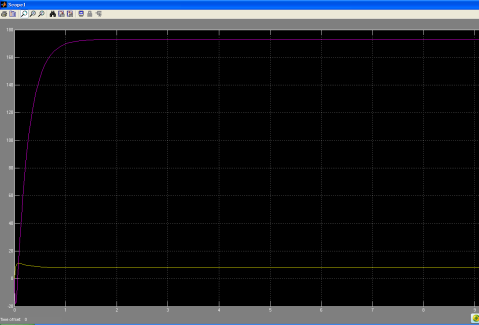
图2-2系统仿真图
3.1结论分析
由图2-2分析可知,该仿真结果与仿真前的理论设计具有一定的差距,电流动态响应的超调量为5.3%,转速动态响应超调量是26.8%,结合所学知识,我们主要将一些非线性化的问题状化为线性问题来处理,比如说将滞后环节近似为一阶惯性等;从仿真结果来看,系统还未调整到最佳状态,这一点可以从动态过渡过程时间及动态恢复时间来看,对于小功率电动机来说系统的响应慢了一点;如果在实际装置上再对系统进行实际调整,可以发现实际调试结果与仿真结果还将有一些差距,而与理论分析结果的差距可能会更大一点。
-
控制系统仿真实验二报告
实验二面向结构图的仿真四思考题1在未考虑调节阀饱和特性时讨论一下两个水箱液位的变化情况工业上是否允许讨论阀位的变化情况工业上是否能…
-
控制系统仿真实验报告
控制系统仿真实验报告一实验目的进一步掌握数值积分法进一步掌握MATLAB软件的使用方法二实验设备数字计算机MATLAB软件三实验预…
-
控制系统仿真实验报告 (2)
昆明理工大学电力工程学院学生实验报告实验课程名称控制系统仿真实验开课实验室年月日实验一电路的建模与仿真一实验目的1了解KCLKVL…
-
控制系统仿真实验报告
附件四学生实验报告表头格式昆明理工大学电力工程学院学生实验报告实验课程名称开课实验室年月日实验一电路的建模与仿真一实验目的1了解K…
-
MATLAB与控制系统仿真实验报告
MATLAB与控制系统仿真实验报告20xx20xx学年第1学期专业班级学号姓名实验三MATLAB图形系统一实验目的1掌握绘制二维图…
- 过程控制系统实验报告
-
控制系统仿真实验报告
控制系统仿真实验报告一实验目的进一步掌握数值积分法进一步掌握MATLAB软件的使用方法二实验设备数字计算机MATLAB软件三实验预…
-
控制系统仿真实验二报告
实验二面向结构图的仿真四思考题1在未考虑调节阀饱和特性时讨论一下两个水箱液位的变化情况工业上是否允许讨论阀位的变化情况工业上是否能…
-
机器人控制-数码管动态显示-仿真实验报告
机器人控制课程总结报告机器人控制仿真实验二数码管动态显示姓名李铃年级20xx级系别信息工程学院计科师学号1111000048同组人…
-
控制系统计算机仿真-实验五
实验五采样控制系统的数字仿真实验一实验目的1掌握采样控制系统数字仿真的特点2了解数字控制器对系统动态性能的影响3学会编制双重循环法…
-
成都理工大学数控机床仿真实验报告()
实验一数控车床操作加工仿真实验一实验目的1掌握手工编程的步骤2掌握数控加工仿真系统的操作流程二实验内容1了解数控仿真软件的应用背景…