哈工大水力学实验指导书
水力学
实 验 指 导 书

哈尔滨工业大学市政环境学院实验中心
二零##年三月
前 言
水力学实验是水力学课程中一个不可缺少的重要教学环节。水力学实验的教育目的是:
1. 在实验中观察水流现象,增强感性认识,巩固理论知识的学习。
2. 通过量测实验验证所学水力学原理,提高理论分析的能力。
3. 学会量测水力要素和使用基本仪器的方法,掌握一定的实验技能,了解现代量测技术。
4. 培养分析实验数据、整理实验成果和编写实验报告的能力。
5. 培养严谨踏实的科学作风和融洽合作的共事态度以及爱护国家财产的良好风尚。
本指道书供交通学院学生使用。
实验一 文丘里流量计校正实验
一、实验目的:
1、掌握文丘里流量计的测量原理;
2、 验证能量方程、连续方程;
3、 率定文丘里流量计的流量系数μ。
二、实验装置:
本实验的装置如图1所示。
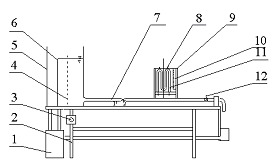
图1.文丘里实验装置图
1、 自循环供水器;2、实验台;3、调速器;4、整流板;5、恒压水箱;6、溢流板;7文丘里流量计;8、气阀;9、测压计;10、滑动标尺;11、多管压差计;12、实验调节阀。
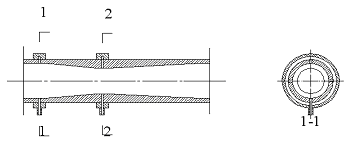
图2.文丘里流量计结构图
其中,文丘里流量计的结构如图2所示。1-1断面d1=1.4cm;2-2断面d2=0.75cm。
三、实验原理:
在文丘里流量计上取断面1-1,2-2列能量方程,令α1=α2=1,不计水头损失,可得:
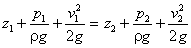 (1)
(1)
由连续性方程:
 (2)
(2)
得: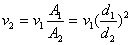
代入(1)式,可得流量计算公式如下:
式中 为两断面测压管水头差Δh。
为两断面测压管水头差Δh。
令 : 并定义为仪器常数。
并定义为仪器常数。
于是
可以看出,在已知文丘里流量计两断面的内径时,只要测得测压管水头差,即可得到计算流量Q。
但在实际液体中,由于水头损失的存在,实际通过的流量Q0略小于计算流量Q。
令 为流量系数。μ是一小于1的数,用它来对计算流量进行修正,则实际流量的计算公式为:
为流量系数。μ是一小于1的数,用它来对计算流量进行修正,则实际流量的计算公式为:
 (3)
(3)
本实验即通过测量实际流量Q0和计算流量Q确定μ系数的具体数值。其中实际流量Q0用体积法来测定:
V为t时间内通过文丘里流量计水的体积。
四、实验方法与步骤:
1. 准备工作:记录仪器常数并算出值。
2. 打开电源开关,全关实验调节阀,检查测压管读数是否相等,不相等时,分析原因,并予以排除。打开实验调节阀,使测压管高度在可读数范围内。
3. 待水流稳定后读取各测压管的液面读数,同时用秒表、量筒测定流量。
4. 逐次改变实验调节阀,改变流量6次,重复步骤3。
5. 把测量值记录在实验表格内,计算出平均流量系数μ。
6. 实验结束,检查测压管读数是否相等,不相等时,分析原因,排除后重新实验。
7. 进行成果分析,回答思考题。
五、注意事项:
- 测压管读数在实验开始和结束时应相等。
- 调节阀门应缓慢,使测压管的液面在滑尺的读数范围内,每次调节后应待水流稳定后再进行测量。
- 电源一打开时为最大流量,实验时保持最大流量。
- 流量系数μ应为一小于1并接近于1的数,若误差较大,将其去掉,分析原因。
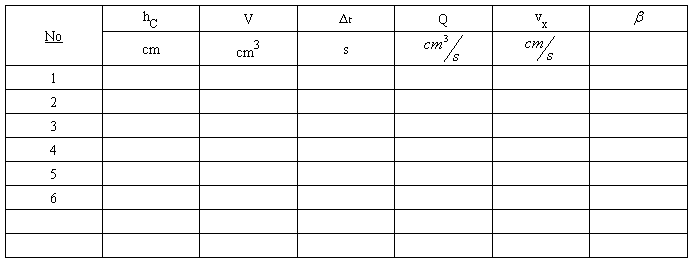
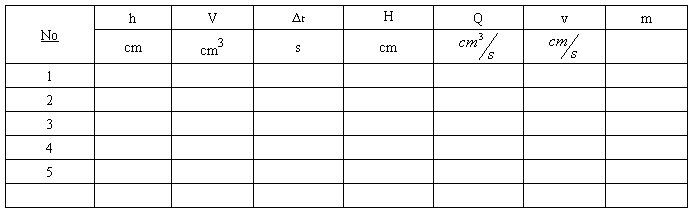
六、实验数据及成果
见表1。
七、思考题
- 文丘里流量计在安装时是否必须保持水平,如不水平,上述计算公式是否仍可应用?
- 能量方程和连续性方程的应用条件是什么?本实验是否满足这些条件。
实验二 动量定律实验
一、 实验目的
1、验证不可压缩流体恒定流的动量方程
2、通过对动量与流速、流量、出射角度、动量矩等因素相关性的分析研讨、进一步掌握动量守恒原则
二、 实验装置
本实验装置如图1所示。
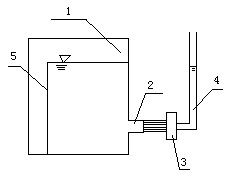
图1
1、恒压水箱;2、喷嘴;3、承压板;4、测压管;5、溢流板;
三、 实验原理
恒定总流的动量方程为:

取管嘴和承压板之间的水为隔离体,忽略摩擦阻力,以水平方向为x方向,动量方程转化为:

即:
式中:
 为测压管高度;
为测压管高度;
 为承压板面积;
为承压板面积;
 为管嘴流量;
为管嘴流量;
 为管嘴流速;
为管嘴流速;
 为动量修正系数。
为动量修正系数。
实验中,在恒定流动状态下,只要测定流量和测压管高度,根据仪器常数管嘴直径d和承压板直径D即可计算出动量修正系数。应在1.02~1.05范围内。
四、 实验方法和步骤
1.熟悉实验装置,记录实验仪器常数。
2.调整测压管,使其处于垂直状态。打开电源。
3.待流动稳定后,测定流量和测压管高度。每个溢流高度测两组。
4.改变溢流高度,重复3步骤。
5.进行成果分析,回答思考题。
五、 注意事项:
1、 实验必须在流动稳定后进行。
2、 对流量的测量应注意准确。
六、 实验数据及成果
1.仪器常数:
 ,
,
2.记录计算表格:
七、 思考题
1、 实测值是否在1.02~1.05范围内,若不在此范围分析原因。
2、 忽略摩擦阻力对实验的结果会有多大影响,试分析之。
实验三 局部阻力实验
一、 实验目的
1.掌握三点法、四点法量测局部阻力系数的技能;
2.通过对圆管突扩、突缩局部阻力的测定,验证突扩局部阻力和突缩局部阻力系数的经验公式;
3.加深对局部阻力的认识。
二、 实验装置
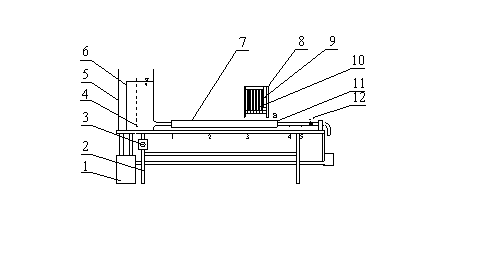
本实验装置如图1示。
 图1 局部阻力实验装置
图1 局部阻力实验装置
1、自循环供水器;2、实验台;3、调速器;4、整流板;5、溢流板;6、恒压水箱;7突扩实验管段;
8、测压计;9、滑动标尺;10、测压管;11、突缩实验管段;12、实验流量调节阀
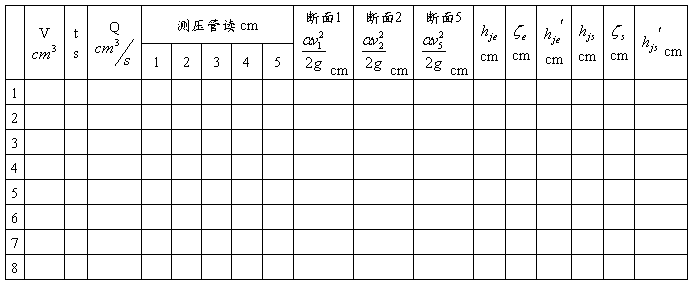
实验管段由小、大、小三段已知管径的管道组成,共设有五个测压点,测点1-3用以测量突扩的局部阻力系数,2-5用以测量突缩的局部阻力系数。
三、 实验原理
1.经验公式:
突扩局部阻力系数:
 (1)
(1)
突扩局部阻力:
 (2)
(2)
突缩局部阻力系数:
 (3)
(3)
突缩局部阻力:
 (4)
(4)
2.实测原理:
突扩局部阻力:
列1-2断面能量方程:

变换为:
 (5)
(5)

 (6)
(6)
突缩局部阻力:
同理:
 (7)
(7)
 (8)
(8)
四、 实验方法与步骤
1.记录实验仪器常数。
2.全关调节阀,打开电子调速器开关,使恒压水箱充水,排除实验管段中的滞留气体。待水箱溢流后,检查各测压管液面是否齐平,若不平,则需排气调平。
3.打开调节阀11,待水流稳定后,读取各测压管的液面读数,同时用秒表、量筒测定流量。
4.逐次改变调节阀,改变流量8次重复步骤3。把测量值记录在实验表格内。实验结束,全关调节阀,检查各测压管液面是否齐平,若不平,则需排气调平。分析原因,排除后重新实验。
5.进行成果分析,回答思考题。
五、 注意事项:
1. 在实验开始和结束时,必须检查各测压管液面是否齐平,若不平,则需排除测压管内气体,调平后再实验。
2. 实验前,必须将实验管段中的气体排出。
3. 调节阀门应缓慢,每次调节后应待水流稳定后再进行测量。
4. 实验中应使测点均匀分布,即使每次实验Δh的数值差尽量接近。
5. 电源一打开时为最大流量,实验时保持最大流量。
六、 实验数据及成果
1.仪器常数:









2.记录计算表格:见表1。
记录计算表格
表1.
七、 思考题
1.结合旋涡仪演示的水力现象,分析局部阻力损失的产生机理。
2.结合实验结论,考察在相同条件下(A1/A2相同),突扩与突缩的局部损失的大小。
3.结合旋涡仪演示的水力现象,分析如何减小局部阻力损失。
实验四 管道沿程阻力系数测定实验
一、实验目的
1、 掌握沿程阻力系数的测定技能;
2、 了解紊流时沿程阻力的规律。
二、 实验装置
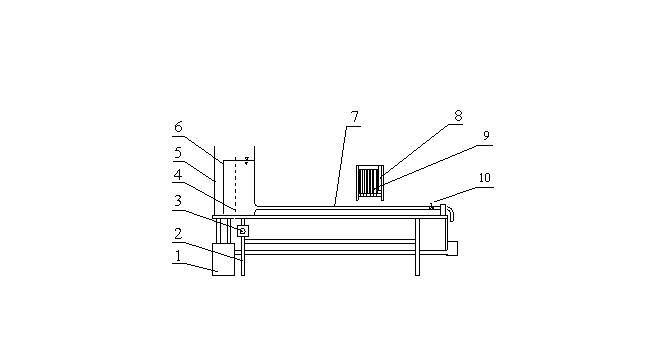
本实验装置如图1所示。
图1
1、 自循环供水器;2、实验台;3、调速器;4、整流板;5、溢流板;6、恒压水箱;
7、实验管路;8、测压计;9、滑动标尺;10实验流量调节阀
三、实验原理
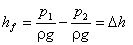
在实验管段测压管连接的两个断面列1-2断面能量方程:

因为实验管段水平设置,管径沿程不变,所以 z1=z2 v1=v2 hw=hf
于是


四、实验方法与步骤
1、 记录实验仪器常数。
2、全关调节阀,打开电子调速器开关,使恒压水箱充水,排除实验管段中的滞留气体。待水箱溢流后,检查各测压管液面是否齐平,若不平,则需排气调平。
3、打开调节阀11,待水流稳定后,读取各测压管的液面读数,同时用秒表、量筒测定流量。
4、逐次改变调节阀,改变流量6次重复步骤3。把测量值记录在实验表格内。实验结束,全关调节阀,检查各测压管液面是否齐平,若不平,则需排气调平。分析原因,排除后重新实验。
5、进行成果分析,回答思考题。
五、注意事项:
1、 在实验开始和结束时,必须检查各测压管液面是否齐平,若不平,则需排除测压管内气体,调平后再实验。
2、 实验前,必须将实验管段中的气体排出。
3、 调节阀门应缓慢,每次调节后应待水流稳定后再进行测量。
4、 实验中应使测点均匀分布,即使每次实验Δh的数值差尽量接近。
5、 电源一打开时为最大流量,实验时保持最大流量。
6、
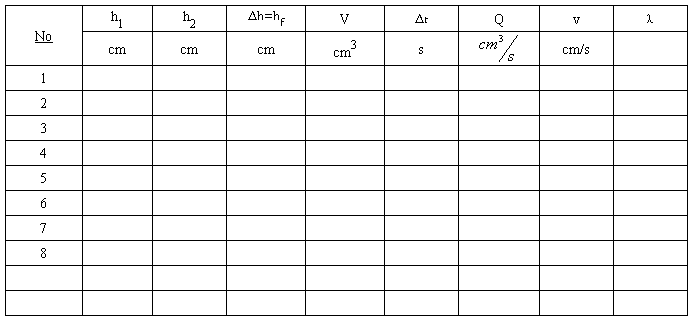
六、 实验数据及成果
仪器常数:
d= 9.22 mm l1-2= 500 mm
七、 思考题
1、分析影响λ值的因素有那些。
2、分析各次实验λ值不同的原因。
实验五宽顶堰实验
一、 实验目的
1. 测定宽顶堰的流量系数m
2. 观察宽顶堰的流动状态和水跌的流动现象
二、 实验装置
本实验装置如图1所示。
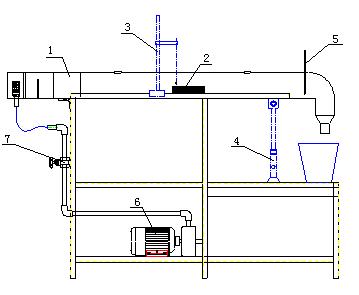
图1
1、变坡水槽;2、宽顶堰;3、液位计;4、变坡千斤顶;
5、尾门;6、循环水泵;7、流量调节阀
三、 实验原理
自由式无侧收缩宽顶堰流量为:
式中:Q为宽顶堰上流量;
 为流量系数;
为流量系数;
 为堰宽;
为堰宽;
 为包括流速水头的堰上水头。
为包括流速水头的堰上水头。
其中:
所以:
别列津斯基根据实验提出经验公式:
 时
时 
 >3.0时
>3.0时 
上式中:p为堰的坎高。
四、 实验方法和步骤
1. 测定堰的坎高p,堰宽b,底坡高度 等仪器常数。熟悉仪器结构。
等仪器常数。熟悉仪器结构。
2. 开动水泵电机,打开进水阀门,调节尾门,使其为自由式宽顶堰,调节、观察水面曲线形状。
3. 用高度尺测量堰上游水深,用量杯、秒表测水体积、时间,记入记录表内。
4. 改变流量,重复步3骤四次。
五、 注意事项:
1. 实验必须在流动稳定后进行。
2. 对流量的测量应注意准确。
3. 液位计应位于堰口5H以上上游处。
4. 测针应与液面刚刚接触为测量点。
六、 实验数据及成果
1.仪器常数:
 mm,
mm,  mm, p= mm
mm, p= mm
2.记录计算表格:
七、 分析思考题
1. 实际测量所得的m与别列津斯基根据实验提出经验公式的计算结果是否相符。若误差较大,试分析之。
实验六水跃实验
一、实验目的
1. 测定水跃的水头损失和消能率。
2. 观察水跃的流动现象,了解水跃类型及其结构的基本特征。
二、实验装置
本实验装置如图1所示。
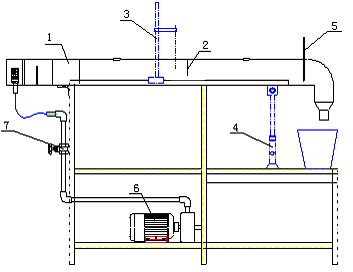
图1
1、变坡水槽;2、闸门;3、液位计;4、变坡千斤顶;
5、尾门;6、循环水泵;7、流量调节阀
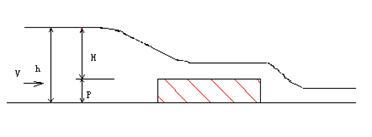
三、实验原理
水跃是明渠流动中水流从急流状态过渡到缓流状态的现象。如图2所示。其中h’和h”为跃前、跃后水深。
水跃前、后两段面单位重量流体的机械能之差为水跃的消能量,其公式为:

水跃的消能率为:

式中:E1为水跃前段面单位重量流体的总机械能:

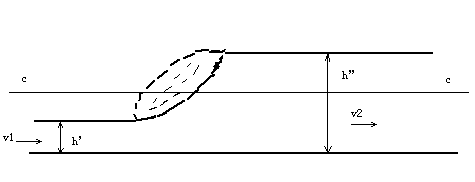
图2
四、实验方法和步骤
1. 测定渠宽b,底坡高度等仪器常数。熟悉仪器结构。
2. 开动水泵电机,打开进水阀门,调节闸门和尾门,使其形成远驱式,调节、观察水面曲线形状。
3. 待稳定后,用高度尺测量堰上、下游水深,用量杯、秒表测水体积、时间,记入记录表内。
4. 改变流量,重复步3骤四次。
五、注意事项:
1. 实验必须在流动稳定后进行。
2. 对流量的测量应注意准确。
3. 测针应与液面刚刚接触为测量点。
一、 实验数据及成果
1.仪器常数:
mm, mm
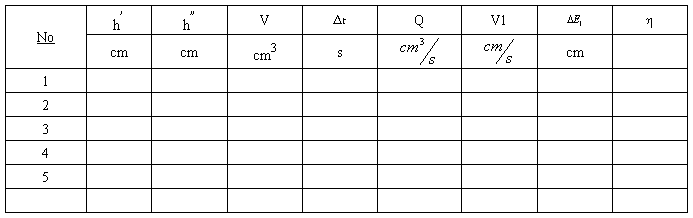
2.记录计算表格:
二、 思考题
1. 简单说明水跃的消能原理。
2. 自行演示水跃的三种形式,分析各种水跃的消能率,
第二篇:哈工大4系飞行器控制实验指导书
飞行器控制实验指导书

控制科学与工程教学实验中心
20##年3月
目 录
一、实验目的和意义
二、实验的基本要求
三、Matlab语言基础
四、实验项目
(一) 实验一 飞行器纵向稳定系统综合设计
(二) 实验二 飞行器侧向稳定器观测器的设计
(三) 实验三 飞行器爬升率与空速的保持与指令控制
(四) 实验四 飞行器3维飞行动画仿真实验
一、实验目的和意义
作为航天学院的学生,掌握飞行器控制方面的知识是必要的。仅仅通过课堂教学,学生很难切实地掌握飞行器控制的知识,很难熟练地应用飞行器控制的方法。为了使学生更深刻地理解飞行器控制方面的知识,开设本实验是必要的。
通过飞行器控制实验,可以使学生更直观地理解课堂上学到的理论,使学生能真正做到理论与实际相结合,会应用课堂上所学到的理论来进行飞行器控制系统的设计,同时,使学生掌握用Matlab来进行飞行器控制系统分析与设计的方法。
二、实验的基本要求
1. 要求学生能较熟练地使用控制系统分析设计软件(Matlab)来进行系统分析与设计。
2. 要求学生能熟练地使用Matlab软件进行编程,并在该软件环境下进行调试。
3. 要求学生掌握模态控制理论(模态可控、模态可观结构分析;模态控制器设计,模态观测器设计),并编制相应的matlab函数。
4. 要求学生能使用所编制的程序进行飞行器控制系统的分析与综合。
三、Matlab语言基础
(一) matlab软件的编程环境
1. 找到Matlab
Matlab软件应用程序的图标为 ,matlab软件被正确安装后,可以将该图标拖曳到桌面上或快捷工具栏中以方便使用。
,matlab软件被正确安装后,可以将该图标拖曳到桌面上或快捷工具栏中以方便使用。
2. 启动Matlab
点击Matlab图标会弹出如下窗口
(二) 飞行器控制实验中要用到的matlab语句
1. 赋值语句:
A=[0 1 0;0 0 1;-6 -11 -6]
2. 矩阵的维数:
[行,列]=size(A)
3. 矩阵的秩:
n=rank(A)
4. 矩阵的逆:
B=inv(A)
5. 求特征值和特征向量:
[V,eva]=eig(A') V为AT的广义模态矩阵,eva=diag(l1,…,ln)
6. 矩阵的转置:
A因为是实数阵所以转置可以用A’,A’是A的共扼转置
而U,V等复数阵的转置要用conj(V’);
7. 子阵的抽取:
A(i:j,m:n); A(:,1);A(i,j)
8. 矩阵四则运算:
(维数要一致)表达式与标量数值运算同
9. 循环语句:
for i=1:1:n+1
程序行
end
10.条件判断:
if(a~=b)
程序行
end
11.结果显示控制:
语句后面加“;”则不显示结果。
12.将某个变量从工作区中清除
clear ParaEva;
13.m函数:
function [AC,KVT]=SImodectrl(A,B,eva0,eva1)
函数体
end function
要求m文件的文件名与函数名一致。
14.绘制某个量的关于时间的曲线:
plot(t,x(1,:)) 逗号分割两个向量(行或列均可),左边为横坐标,右边为纵坐标
grid 加栅格
axis([x0 x1 y0 y1]) 确定坐标系大小
figure(i) 定义新图,设定当前图
以上语句及其它感兴趣的函数、语法的详细使用说明可以参阅MATLAB的帮助。
四、实验报告
飞行器控制实验报告
(实验报告模版在ftp://219.217.250.117/incoming中下载)
班级:
学号:
姓名:
时间:20##年 12月 12日
控制科学与工程教学实验中心
20##年12月
(一) 实验一 飞行器纵向稳定系统综合设计
1.实验要求:
(1) 掌握单输入多模态控制的设计步骤,及各参数的确定;
(2) 会用单输入多模态控制方法设计飞行器的稳态控制器;
(3) 会用Matlab工具
2. 实验过程:(从Matlab的工作区中将输入和计算过程复制粘贴过来,可以改变一下字体大小和格式)
l 表2-1纵向短周期模态的模态控制
(1)飞机原始数学模型
状态变量:
输入变量:
A:
>> A=[-0.602,1;-15.988,-0.5]
A =
-0.6020 1.0000
-15.9880 -0.5000
B:
>> B=[-0.0848;-9.439]
B =
-0.0848
-9.4390
(2)A的特征值和特征向量特征向量矩阵(在Matlab直接计算出来的U的结果上乘以自己的学号(两位))
L:
U:
V:
>> [U,L]=eig(A)
U =
0.0031 - 0.2426i 0.0031 + 0.2426i
0.9701 0.9701
L =
-0.5510 + 3.9982i 0
0 -0.5510 - 3.9982i
>> U=U*28
U =
0.0866 - 6.7928i 0.0866 + 6.7928i
27.1634 27.1634
>> V=conj(inv(U))'
V =
0 + 0.0736i 0 - 0.0736i
0.0184 - 0.0002i 0.0184 + 0.0002i
(3)配置要求(AC的特征值)
LC:
>> LC=[-2.1+2.142i;-2.1-2.142i]
LC =
-2.1000 + 2.1420i
-2.1000 - 2.1420i
(4)模态可控阵
P:
>> P=inv(U)*B
P =
-0.1737 - 0.0040i
-0.1737 + 0.0040i
(5)比例控制器增益
K:
>> K1=(LC(1)-L(1,1))*(LC(2)-L(1,1))/P(1)/(L(2,2)-L(1,1))
K1 =
9.0606 + 6.2665i
>> K2=(LC(1)-L(2,2))*(LC(2)-L(2,2))/P(2)/(L(1,1)-L(2,2))
K2 =
9.0606 - 6.2665i
>> K=[K1 K2]
K =
9.0606 + 6.2665i 9.0606 - 6.2665i
(6)状态反馈增益阵
G:
>> G=K1*conj(V(:,1)')+K2*conj(V(:,2)')
G =
-0.9225 0.3365
(7)闭环系统矩阵及其特征值
AC:
>> AC=A+B*G
AC =
-0.5238 0.9715
-7.2804 -3.6762
LC:
>> LC=eig(AC)
LC =
-2.1000 + 2.1420i
-2.1000 - 2.1420i
(8)开环系统响应曲线(攻角初值为2.5°):
(9)闭环系统响应曲线(攻角初值为2.5°):
(10)闭环时的输入曲线:

l 表2-2纵向短周期和俯仰角模态的模态控制
(1)飞机原始数学模型
状态变量:
输入变量:
A:
>> A=[0,0,1;0,-0.602,1;0,-15.988,-0.5]
A =
0 0 1.0000
0 -0.6020 1.0000
0 -15.9880 -0.5000
B:
>> B=[0;-0.0848;-9.439]
B =
0
-0.0848
-9.4390
(2)A的特征值和特征向量特征向量矩阵(在Matlab直接计算出来的U的结果上乘以自己的学号(两位))
L:
U:
V:
>> [U,L]=eig(A)
U =
1.0000 -0.0319 - 0.2315i -0.0319 + 0.2315i
0 0.0030 - 0.2359i 0.0030 + 0.2359i
0 0.9433 0.9433
L =
0 0 0
0 -0.5510 + 3.9982i 0
0 0 -0.5510 - 3.9982i
>> U=U*28
U =
28.0000 -0.8934 - 6.4827i -0.8934 + 6.4827i
0 0.0842 - 6.6047i 0.0842 + 6.6047i
0 26.4111 26.4111
>> V=conj(inv(U))'
V =
0.0357 0 0
-0.0351 0 + 0.0757i 0 - 0.0757i
0.0013 + 0.0000i 0.0189 - 0.0002i 0.0189 + 0.0002i
(3)配置要求(AC的特征值)
LC:
>> LC=[-0.2;-2.1+2.142i;-2.1-2.142i]
LC =
-0.2000
-2.1000 + 2.1420i
-2.1000 - 2.1420i
(4)模态可控阵
P:
>> P=inv(U)*B
P =
-0.0095 - 0.0000i
-0.1787 - 0.0041i
-0.1787 + 0.0041i
(5)比例控制器增益
K:
>> K1=(LC(1)-L(1,1))*(LC(2)-L(1,1))*(LC(3)-L(1,1))/P(1)/(L(2,2)-L(1,1))/(L(3,3)-L(1,1))
K1 =
11.6468 - 0.0000i
>> K2=(LC(1)-L(2,2))*(LC(2)-L(2,2))*(LC(3)-L(2,2))/P(2)/(L(1,1)-L(2,2))/(L(3,3)-L(2,2))
K2 =
9.0491 + 5.6192i
>> K3=(LC(1)-L(3,3))*(LC(2)-L(3,3))*(LC(3)-L(3,3))/P(3)/(L(1,1)-L(3,3))/(L(2,2)-L(3,3))
K3 =
9.0491 - 5.6192i
K=[K1 K2 K3]
K =
11.6468 - 0.0000i 9.0491 + 5.6192i 9.0491 - 5.6192i
(6)状态反馈增益阵
G:
>> G=K1*conj(V(:,1)')+K2*conj(V(:,2)')+K3*conj(V(:,3)')
G =
0.4160 - 0.0000i -1.2591 + 0.0000i 0.3607 - 0.0000i
>> G=real(G)
G =
0.4160 -1.2591 0.3607
(7)闭环系统矩阵及其特征值
AC:
>> AC=A+B*G
AC =
0 0 1.0000
-0.0353 -0.4952 0.9694
-3.9262 -4.1037 -3.9048
LC:
>> LC=eig(AC)
LC =
-0.2000
-2.1000 + 2.1420i
-2.1000 - 2.1420i
(8)开环系统响应曲线(俯仰角速度初值为5°/s):
(9)闭环系统响应曲线(俯仰角速度初值为5°/s):
(10)闭环时的输入曲线:
(二) 实验二 飞行器侧向稳定器观测器的设计
1.实验要求:
(1) 掌握多输入单模态控制的设计步骤,及各参数的确定;
(2) 会用多输入单模态控制方法设计飞行器的稳态控制器;
(3) 熟悉降维状态观测器的设计方法;
(4) 掌握利用状态观测器实现状态反馈的方法;
(5) 会用Matlab工具进行多输入单模态控制设计和状态观测器设计
2. 实验过程:(从Matlab的工作区中将输入和计算过程复制粘贴过来,可以改变一下字体大小和格式)
l 教材第40页
(1)飞机原始数学模型
状态变量:
输入变量:
A:
>> A=[-0.0981,0.2957,-0.9950,0.1338;-14.296,-1.0541,1.1395,0;0.7717,-0.0238,-0.2981,0;0,1.0,0.3096,0]
A =
-0.0981 0.2957 -0.9950 0.1338
-14.2960 -1.0541 1.1395 0
0.7717 -0.0238 -0.2981 0
0 1.0000 0.3096 0
B:
>> B=[0,0.0169;-7.8013,-1.1160;0.1454,-0.6548;0,0]
B =
0 0.0169
-7.8013 -1.1160
0.1454 -0.6548
0 0
C:
>> C=[0,0;1,0;0,1;0,0]
C =
0 0
1 0
0 1
0 0
>> C'
ans =
0 1 0 0
0 0 1 0
(2)A的特征值和特征向量特征向量矩阵(在Matlab直接计算出来的U的结果上乘以自己的学号(两位))
L:
U:
V:
>> [U,L]=eig(A)
U =
-0.0506 - 0.1356i -0.0506 + 0.1356i -0.0097 0.0166
0.9023 0.9023 0.5651 -0.1439
-0.0477 + 0.0280i -0.0477 - 0.0280i 0.0513 0.0901
-0.0532 - 0.3987i -0.0532 + 0.3987i -0.8233 0.9853
L =
-0.3134 + 2.1844i 0 0 0
0 -0.3134 - 2.1844i 0 0
0 0 -0.7057 0
0 0 0 -0.1178
>> U=U*28
U =
-1.4155 - 3.7980i -1.4155 + 3.7980i -0.2711 0.4649
25.2653 25.2653 15.8242 -4.0300
-1.3362 + 0.7847i -1.3362 - 0.7847i 1.4371 2.5216
-1.4904 -11.1630i -1.4904 +11.1630i -23.0533 27.5896
>> V=conj(inv(U))'
V =
-0.0337 + 0.1238i -0.0337 - 0.1238i 0.1033 - 0.0000i -0.0176 - 0.0000i
0.0155 + 0.0057i 0.0155 - 0.0057i 0.0163 + 0.0000i 0.0107 + 0.0000i
-0.0535 - 0.0242i -0.0535 + 0.0242i 0.2213 - 0.0000i 0.1987 - 0.0000i
0.0077 + 0.0010i 0.0077 - 0.0010i -0.0196 + 0.0000i 0.0199 + 0.0000i
(3)配置要求(AC的特征值):将A的特征值中模最小的特征值配置为-1
LC:
>> LC=[-0.3134 + 2.1844i;-0.3134 - 2.1844i;-0.7057;-1]
LC =
-0.3134 + 2.1844i
-0.3134 - 2.1844i
-0.7057
-1.0000
(4)模态可控阵,模态可观阵
P:
R:
>> P=inv(U)*B
P =
-0.1289 - 0.0481i 0.0171 + 0.0116i
-0.1289 + 0.0481i 0.0171 - 0.0116i
-0.0953 - 0.0000i -0.1614 + 0.0000i
-0.0546 - 0.0000i -0.1424 - 0.0000i
>> R=conj(U')*C
R =
25.2653 -1.3362 + 0.7847i
25.2653 -1.3362 - 0.7847i
15.8242 1.4371
-4.0300 2.5216
(5)比例控制器增益
K:
>> K1=P(4,1)*(LC(4)-L(4,4))/(P(4,1)*P(4,1)+P(4,2)*P(4,2))
K1 =
2.0725 + 0.0000i
>> K2=P(4,2)*(LC(4)-L(4,4))/(P(4,1)*P(4,1)+P(4,2)*P(4,2))
K2 =
5.4016 - 0.0000i
>> K=[K1;K2]
K =
2.0725 + 0.0000i
5.4016 - 0.0000i
(6)状态反馈增益阵
G:
>> G=K*conj(V(:,4)')
G =
-0.0364 - 0.0000i 0.0222 + 0.0000i 0.4119 + 0.0000i 0.0413 + 0.0000i
-0.0948 - 0.0000i 0.0578 + 0.0000i 1.0735 - 0.0000i 0.1077 - 0.0000i
(7)闭环系统矩阵及其特征值
AC:
>> AC=A+B*G
AC =
-0.0997 - 0.0000i 0.2967 + 0.0000i -0.9769 - 0.0000i 0.1356 - 0.0000i
-13.9063 + 0.0000i -1.2917 - 0.0000i -3.2722 - 0.0000i -0.4427 - 0.0000i
0.8285 + 0.0000i -0.0584 - 0.0000i -0.9411 + 0.0000i -0.0645 + 0.0000i
0 1.0000 0.3096 0
LC:
>> LC=eig(AC)
LC =
-0.3134 + 2.1844i
-0.3134 - 2.1844i
-0.7057 + 0.0000i
-1.0000 - 0.0000i
(8)状态观测器的形式(使用公式编辑器编辑式2-170和2-171)


(9)状态观测器各参数的确定[状态观测器的系统矩阵特征值取:-(自己学号最后一位+1), - (自己学号最后一位+2)]
Q:
>> theta=[-9,0;0,-10]
theta =
-9 0
0 -10
M:
>> M=[1,0.5;0.5,1]
M =
1.0000 0.5000
0.5000 1.0000
T:
F:
function [T,F]=FObserveT(eva,P,R,M,theta)
n=size(eva);
[n,l]=size(R);
MRT=M*conj(R');
for i=1:1:n-l
for j=1:1:n
T(i,j)=MRT(i,j)/(eva(j,j)-theta(i,i));
end
end
F=T*P;
[T,F]=FobserveT(L,P,R,M,theta)
T =
2.6739 - 0.6272i 2.6739 + 0.6272i 1.9945 -0.3118
1.1271 - 0.1732i 1.1271 + 0.1732i 1.0059 0.0513
F =
-0.9229 - 0.0000i -0.1716 - 0.0000i
-0.4060 - 0.0000i -0.1271 - 0.0000i
(10)模态与输出之间的关系(用输出表示模态)
INVN=[L1, L2]:
>> N=[conj(R');T]
N =
25.2653 25.2653 15.8242 -4.0300
-1.3362 + 0.7847i -1.3362 - 0.7847i 1.4371 2.5216
2.6739 - 0.6272i 2.6739 + 0.6272i 1.9945 -0.3118
1.1271 - 0.1732i 1.1271 + 0.1732i 1.0059 0.0513
>> INVN=inv(N)
INVN =
1.0e+002 *
-0.0060 - 0.0032i -0.0562 - 0.0223i -0.2624 - 0.0944i 0.6957 + 0.2698i
-0.0060 + 0.0032i -0.0562 + 0.0223i -0.2624 + 0.0944i 0.6957 - 0.2698i
0.0155 - 0.0000i 0.1414 - 0.0000i 0.6569 - 0.0000i -1.7387 + 0.0000i
-0.0173 + 0.0000i -0.1501 + 0.0000i -0.7113 + 0.0000i 1.8963 - 0.0000i
>> L1=INVN(:,1:2)
L1 =
-0.6039 - 0.3222i -5.6245 - 2.2308i
-0.6039 + 0.3222i -5.6245 + 2.2308i
1.5523 - 0.0000i 14.1378 - 0.0000i
-1.7254 + 0.0000i -15.0107 + 0.0000i
>> L2=INVN(:,3:4)
L2 =
1.0e+002 *
-0.2624 - 0.0944i 0.6957 + 0.2698i
-0.2624 + 0.0944i 0.6957 - 0.2698i
0.6569 - 0.0000i -1.7387 + 0.0000i
-0.7113 + 0.0000i 1.8963 - 0.0000i
(11)状态反馈的实现(用输出表示输入)
GU[L1, L2]:
>> GUL=G*U*INVN
GUL =
1.0e+003 *
-0.0036 + 0.0000i -0.0311 + 0.0000i -0.1474 + 0.0000i 0.3930 - 0.0000i
-0.0093 + 0.0000i -0.0811 + 0.0000i -0.3842 + 0.0000i 1.0243 - 0.0000i
(12)带有状态观测器的原始系统方程(查看特征值)
系统矩阵AA:
>> AA(1:4,1:4)=A
AA =
-0.0981 0.2957 -0.9950 0.1338
-14.2960 -1.0541 1.1395 0
0.7717 -0.0238 -0.2981 0
0 1.0000 0.3096 0
AA(1:4,5:6)=0
AA(5:6,1:4)=M*C'
AA(5:6,5:6)=theta
AA =
-0.0981 0.2957 -0.9950 0.1338 0 0
-14.2960 -1.0541 1.1395 0 0 0
0.7717 -0.0238 -0.2981 0 0 0
0 1.0000 0.3096 0 0 0
AA =
-0.0981 0.2957 -0.9950 0.1338 0 0
-14.2960 -1.0541 1.1395 0 0 0
0.7717 -0.0238 -0.2981 0 0 0
0 1.0000 0.3096 0 0 0
0 1.0000 0.5000 0 0 0
0 0.5000 1.0000 0 0 0
AA =
-0.0981 0.2957 -0.9950 0.1338 0 0
-14.2960 -1.0541 1.1395 0 0 0
0.7717 -0.0238 -0.2981 0 0 0
0 1.0000 0.3096 0 0 0
0 1.0000 0.5000 0 -9.0000 0
0 0.5000 1.0000 0 0 -10.0000
系统方程:

AA特征值:
>> eig(AA)
ans =
-9.0000
-10.0000
-0.3134 + 2.1844i
-0.3134 - 2.1844i
-0.7057
-0.1178
(13)带有状态观测器的闭环系统方程(查看特征值)
系统矩阵AAC:
>> AAC(1:4,1:4)=A+B*G*U*L1*C';
AAC(1:4,5:6)=B*G*U*L2;
AAC(5:6,1:4)=M*C'+F*G*U*L1*C';
AAC(5:6,5:6)=theta+F*G*U*L2
AAC =
1.0e+003 *
Columns 1 through 5
-0.0001 0.0001 + 0.0000i -0.0024 + 0.0000i 0.0001 -0.0065 + 0.0000i
-0.0143 0.0372 - 0.0000i 0.3344 - 0.0000i 0 1.5791 - 0.0000i
0.0008 0.0056 - 0.0000i 0.0483 - 0.0000i 0 0.2302 - 0.0000i
0 0.0010 0.0003 0 0
0 0.0059 - 0.0000i 0.0431 - 0.0000i 0 0.1930 - 0.0000i
0 0.0031 - 0.0000i 0.0239 - 0.0000i 0 0.1087 - 0.0000i
Column 6
0.0173 - 0.0000i
-4.2097 + 0.0000i
-0.6136 + 0.0000i
0
-0.5384 + 0.0000i
-0.2997 + 0.0000i
>> real(AAC)
ans =
1.0e+003 *
-0.0001 0.0001 -0.0024 0.0001 -0.0065 0.0173
-0.0143 0.0372 0.3344 0 1.5791 -4.2097
0.0008 0.0056 0.0483 0 0.2302 -0.6136
0 0.0010 0.0003 0 0 0
0 0.0059 0.0431 0 0.1930 -0.5384
0 0.0031 0.0239 0 0.1087 -0.2997
闭环系统方程:

AAC特征值:
>> eig(AAC)
ans =
-10.0000 + 0.0000i
-9.0000 - 0.0000i
-0.3134 - 2.1844i
-0.3134 + 2.1844i
-0.7057 - 0.0000i
-1.0000 + 0.0000i
(三) 实验三 飞行器爬升率与空速的保持与指令控制
1.实验要求:
(1) 会写出输出方程;
(2) 会进行状态反馈的设计实现飞行器爬升率与空速的保持;
(3) 掌握非零平衡点的概念;
(4) 会在保持的基础上实现飞行器爬升率与空速的指令控制;
(5) 会用Matlab的simulink工具进行飞行器控制仿真。
2. 实验过程:(从Matlab的工作区中将输入和计算过程复制粘贴过来,可以改变一下字体大小和格式)
l 教材第98页例8 (完整数学模型参考81页例1)
(1) 飞机稳态时的数学模型(带有风干扰W)
Ax+Bz+GW=0
Cx+Dz+HW=y
状态变量x:

输入变量z:

输出变量y(有无风干扰时不同参考式5-8和式5-72):

扰动变量W:

矩阵A:
矩阵B:

矩阵C:
矩阵D:

矩阵G(有风干扰时):
矩阵H(有风干扰时):

(2) 非零平衡点(考虑风干扰验证式5-8)
a. 求出矩阵IMN和MN:
IMN =
= =
=
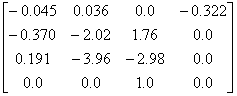
IMN=[A B G;C D H;zeros(2,4) zeros(2,2) eye(2)]
IMN =
-0.0450 0.0360 0 -0.3220 0 1.0000 0.0450 -0.0360
-0.3700 -2.0200 1.7600 0 -0.2820 0 0.3700 2.0200
0.1910 -3.9600 -2.9800 0 -11.0000 0 -0.1910 3.9600
0 0 1.0000 0 0 0 0 0
1.0000 0 0 0 0 0 -1.0000 0
0 -1.0000 0 1.7600 0 0 0 1.0000
0 0 0 0 0 0 1.0000 0
0 0 0 0 0 0 0 1.0000
=MN=
MN=inv(IMN)
MN =
0 0 0 0 1.0000 0 1.0000 0
0 -0.5212 0.0134 0.9572 -0.1954 0 0 1.0000
0 0.0000 -0.0000 1.0000 0.0000 0 0 0
0 -0.2962 0.0076 0.5439 -0.1110 0.5682 0 0
0 0.1876 -0.0957 -0.6155 0.0877 0 0 0
1.0000 -0.0766 0.0020 0.1407 0.0163 0.1830 0 0
0 0 0 0 0 0 1.0000 0
0 0 0 0 0 0 0 1.0000
b. 求出矩阵M,N。
M=MN(1:4,5:6)
M =
1.0000 0
-0.1954 0
0.0000 0
-0.1110 0.5682
N=MN(5:6,5:6)
N =
0.0877 0
0.0163 0.1830
(3) 非零平衡点(不考虑风干扰)
a. 求出矩阵IMN和MN:
IMN =
= =
=
IMN=[A B;C D]
IMN =
-0.0450 0.0360 0 -0.3220 0 1.0000
-0.3700 -2.0200 1.7600 0 -0.2820 0
0.1910 -3.9600 -2.9800 0 -11.0000 0
0 0 1.0000 0 0 0
1.0000 0 0 0 0 0
0 -1.0000 0 1.7600 0 0
=MN=
MN=inv(IMN)
MN =
0 0 0 0 1.0000 0
0 -0.5212 0.0134 0.9572 -0.1954 0
0 0.0000 -0.0000 1.0000 0.0000 0
0 -0.2962 0.0076 0.5439 -0.1110 0.5682
0 0.1876 -0.0957 -0.6155 0.0877 0
1.0000 -0.0766 0.0020 0.1407 0.0163 0.1830
b. 求出矩阵M,N。
M=MN(1:4,5:6)
M =
1.0000 0
-0.1954 0
0.0000 0
-0.1110 0.5682
N=MN(5:6,5:6)
N =
0.0877 0
0.0163 0.1830
(4) 保持和指令控制(不考虑风干扰)
a. 状态反馈增益阵F。( z=-Fx,de=0.309q, d t=0)
F=[0 0 0 0.309;0 0 0 0]
F =
0 0 0 0.3090
0 0 0 0
b. 求出NFM。u = -F(x -xs) +us = - Fx+ Fxs+ us =(N+FM)yc - Fx=NFMyc - Fx
NFM=N+F*M
NFM =
0.0534 0.1756
0.0163 0.1830
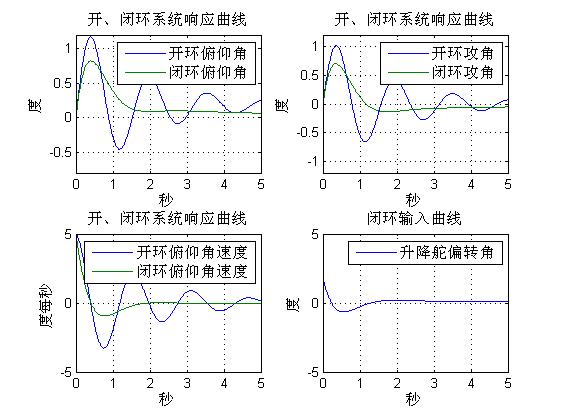
(5) 使用simulink搭建系统进行仿真,绘制出图5-16,5-17(要注明相关的参数设置)。
Simulink仿真框图如下:
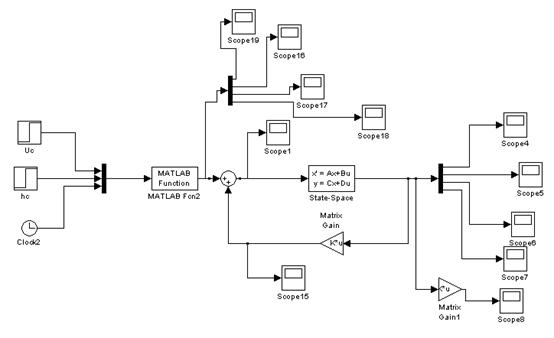
关于图5-16的相关参数设置如下:
Uc终值为0,hc终值为10
MATLAB function设置为[0.122*u(1)-0.1756*u(2) 0.0163*u(1)+0.183*u(2) 0 0]
状态空间参数设置为:
A:[-0.045 0.036 0 -0.322;-0.370 -2.02 1.76 0;0.191 -3.96 -2.98 0;0 0 1 0]
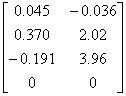
B:[0 1 0.045 -0.036;-0.282 0 0.370 2.02;-11 0 -0.191 3.96;0 0 0 0]
C:[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1]
D:[0 0 0 0;0 0 0 0;0 0 0 0;0 0 0 0]
反馈矩阵设置为[0 0 0 0.309;0 0 0 0;0 0 0 0;0 0 0 0]
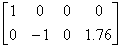
MatrixGain1的参数为[0 -1 0 1.76]
响应曲线如下图,从左至右从上到下依次为爬升率曲线, 曲线,
曲线, 曲线,
曲线, 和
和 曲线。
曲线。
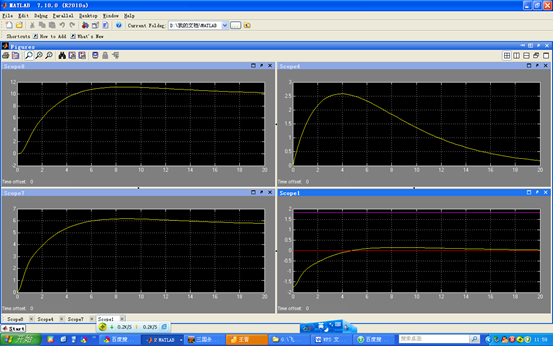
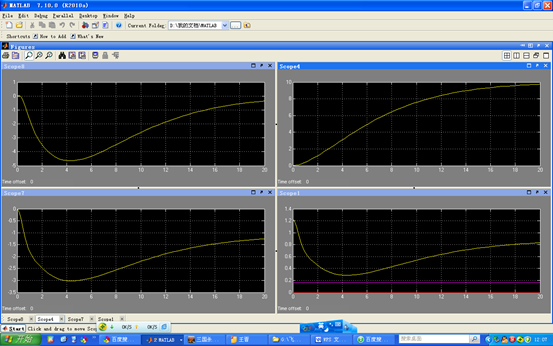
关于图5-17的相关参数设置如下:
Uc终值为10,hc终值为0
MATLAB function设置为[0.122*u(1)-0.1756*u(2) 0.0163*u(1)+0.183*u(2) 0 0]
状态空间参数设置为:
A:[-0.045 0.036 0 -0.322;-0.370 -2.02 1.76 0;0.191 -3.96 -2.98 0;0 0 1 0]
B:[0 1 0.045 -0.036;-0.282 0 0.370 2.02;-11 0 -0.191 3.96;0 0 0 0]
C:[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1]
D:[0 0 0 0;0 0 0 0;0 0 0 0;0 0 0 0]
反馈矩阵设置为[0 0 0 0.309;0 0 0 0;0 0 0 0;0 0 0 0]
MatrixGain1的参数为[0 -1 0 1.76]
响应曲线如下图,从左至右从上到下依次为爬升率曲线,曲线,曲线,和曲线。
-
工程力学 实验力学 实验报告
实验一金属试件打磨以及贴片和焊线实验目的1掌握金属试件打磨方法2初步掌握电阻应变片的粘贴技术3初步掌握焊接和检查实验设备和器材1电…
-
南理工实验力学实验报告
一实验一材料循环应力应变曲线的探究实验目的通过对材料进行循环加载并利用所获取数据绘出材料的循环应力应变曲线认识与分析材料的循环特性…
-
实验力学实验报告
纯弯曲梁正应力电测实验一实验目的1电测法测定纯弯曲梁正应力分布规律2验证纯弯曲梁正应力计算公式3计算弹性模量E二实验装置与仪器1纯…
-
材料力学实验报告答案
材料力学实验报告评分标准拉伸实验报告一、实验目的(1分)1.测定低碳钢的强度指标(s、b)和塑性指标(、)。2.测定铸铁的强度极限…
-
材料力学实验报告
实验一拉伸实验一实验目的1测定低碳钢Q235的屈服点s强度极限b延伸率断面收缩率2测定铸铁的强度极限b3观察低碳钢拉伸过程中的各种…
-
哈工大-数值分析上机实验报告
实验报告一题目非线性方程求解摘要非线性方程的解析解通常很难给出因此线性方程的数值解法就尤为重要本实验采用两种常见的求解方法二分法和…
-
哈工大数电实验报告
HarbinInstituteofTechnology数字逻辑电路与系统课程名称院系班级哈尔滨工业大学20xx年11月实验二时序逻…
-
哈工大 数字信号处理实验报告
实验一用FFT作谱分析实验目的1进一步加深DFT算法原理和基本性质的理解因为FFT只是DFT的一种快速算法所以FFT的运算结果必然…
-
哈工大近代光学实验报告
近代光学创新实验双曝光全息照相技术介绍院系专业光学工程学生许祯瑜学号班号20xx年6月双曝光全息照相技术介绍摘要双曝光全息照相技术…
-
哈工大数值分析上机实验报告 20xx年
实验报告一题目Gauss列主元消去法摘要求解线性方程组的方法很多主要分为直接法和间接法本实验运用直接法的Guass消去法并采用选主…
-
水力学实验总结报告
水力学实验总结报告—经过八个星期的学习与实验,我学到了很多相关的知识,也对水力学实验部分有了自认为较为清醒的体会与感悟。因为之前有…