经纬仪的认识、使用与测回法测水平角
实验四 经纬仪的认识、使用与测回法测水平角
一、目的与要求
1.理解水平角测量原理。了解DJ6型光学经纬仪各主要部件的名称和作用。
2.练习经纬仪对中、整平、瞄准和读数的方法,掌握基本操作要领。
3.要求对中误差小于1mm,整平误差小于一格。
4.掌握测回法观测水平角的观测顺序、记录和计算方法。上、下半测回角值互差不超过±40″;各测回差不超过±24″。
二、计划与学时
1.实验时数安排2 ~ 3学时,实验小组由3 ~ 5人组成。
2.实验设备为每组DJ6型光学经纬仪1台,记录板1块,记录表格,铅笔,测伞1把。
3.在实验场地每组打一木桩,桩顶钉一小钉或划十字作为测站点(如果是水泥地面,可用红色油漆或粉笔在地面上画十字作为测站点),各组的测站点最好布置在一条直线上,以便教师指导,周围布置A、B两个目标,供测角共用。
4.在熟悉经纬仪的使用后,每人用测回法测水平角二个测回,实验结束时,每人交一份实验报告四。
三、方法与步骤
1.经纬仪的安置
(1)松开三脚架,安置于测站点上。其高度大约在胸口附近,架头大致水平。
(2)打开仪器箱,双手握住仪器支架,将仪器从箱中取出置于架头上。一手紧握支架,一手拧紧连接螺旋。
2.熟悉仪器各部件的名称和作用
3.经纬仪的使用
对中: 调整对中器对光螺旋,看清测站点。一脚固定,移动三脚架的另外两个脚,使对中器中的十字丝对准测站点,踩紧三脚架,通过逐个调节三脚架高度使圆水准气泡居中。
整平: 转动照准部,使水准管平行于任意一对脚螺旋,同时相对旋转这对脚螺旋,使水准管气泡居中;将照准部绕竖轴转动90°,旋转第三只脚螺旋,使气泡居中。再转动90°,检查气泡误差,直到小于刻划线的一格为止。对中整平应反复多次同时进行,一般起码是粗略对中、粗略整平(伸缩脚架)、精准对中、精准整平(调节脚螺旋)两次完成。
瞄准: 用望远镜上瞄准器瞄准目标,从望远镜中看到目标,旋紧望远镜和照准部的制动螺旋,转动目镜螺旋,使十字丝清晰。再转动物镜对光螺旋,使目标影像清晰,转动望远镜和照准部的微动螺旋,使目标被单根竖丝平分,或将目标夹在双根竖丝中央,瞄准必须十分准确,否则等于目标方向没有照准。
读数: 打开反光镜,调节反光镜使读数窗亮度适当,旋转读数显微镜的目镜,看清读数窗分划,根据使用的仪器用分微尺或测微尺读数。
4.测回法测水平角
(1)度盘配置:如要测n个测回,则按公式180°/n递增配置水平度盘。若测两个测回,其配置为,根据公式计算第一测回盘左起始读数为0°00′00″或稍大于0°,第二测回盘左起始读数为90°00′00″或稍大于90°。
(2)一测回观测
盘左 瞄准左边目标A,进行读数记a1,顺时针方向转动照准部,瞄准右边目标B,进行读数记b1,计算上半测回角值β左=b1-a1 。
盘右 瞄准右目标B,进行读数记b2,逆时针方向转动照准部,瞄准目标A,进行读数记a2,计算下半测回角值β右=b2-a2 。
检查上、下半测回角值互差是否超限±40″,计算一测回角值 。
(3)测站观测完毕后,检查各测回角值互差不超过±24″,计算各测回的平均角值。
四、注意事项
1.按正确的方法寻找目标和进行瞄准,瞄准目标时,尽可能瞄准其底部。
2.同一测回观测时,盘左起始方向度盘配置好后,切勿误动度盘变换手轮或复测扳手。
3.同一测回观测时,除盘左起始方向度盘配置好外,其余方向均不得再动度盘变换手轮或复测扳手调零。
4.用水平角计算公式计算水平角时,当不够减时则将右目标读数加上360°以后再减左侧目标读数来计算水平角。
5.在操作中,千万不要将轴座连接螺旋当成水平制动螺旋而松开。
实验报告四 经纬仪的认识、使用与测回法测水平角
日期 班组 姓名 仪器编号
一、完成下列DJ6型经纬仪各部件名称的填写
图 DJ6型经纬仪的构造
1( )、2( )、3( )、4( )、5( )、6( )、7( )、
8( )、9( )、10( )、11( )、12( )、13( )、14( )、
15( )、16( )、17( )、18( )、19( )、20( )、21( )、
22( )
二、完成下列填空
1.移动三脚架的其中( ),使对中器中的十字丝对准( ),踩紧三脚架,通过调节三脚架( )使圆水准气泡居中。
2.转动照准部,使水准管平行于任意一对脚螺旋,同时( )旋转这对脚螺旋,使水准管气泡居中;将照准部绕竖轴转动( ),旋转第三只脚螺旋,使气泡居中。再转动90°,检查气泡误差,直到小于刻划线的( )为止。
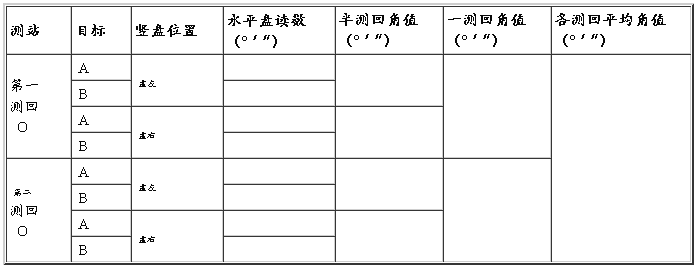
三、实验记录计算
测回法测水平角记录计算表
第二篇:单经纬仪测风
单经纬仪测风实验报告
姓名:刘浩
学号:111170052
2013/5/8
一、实验目的
掌握GYR1电子式光学经纬仪的操作使用方法,学会冲灌、捕捉气球方法和准确读数的技术,编程处理观测数据。
二、实验原理
按固定升速数值求取氢气的净举力值,冲罐并释放固定升速气球,用经纬仪观测气球,保证气球一直在观测中心,导出数据,用单经纬仪测风计算程序计算出高空中不同高度的风向风速。
三、 实验步骤
1. 测风经纬仪安装、调试和使用
a. 经纬仪应设置在开阔区域。
b. 拉开并牢固的架设三脚架,使其顶面尽量调整水平,使顶面与观测员的第二颗衣扣同高。
c. 从箱内取出经纬仪,用三脚架顶面中心螺钉把经纬仪固定。
d. 转动望远镜,使水准仪与三个水平调节螺钉中的任意两个平行。调节这两个螺钉,使气泡居中央,然后将水准仪转过90度再调节另一个螺钉使气泡居中,这时望远镜转动到任意位置上,水准仪气泡偏离中心不得大于1格,否则重复上述步骤以至符合要求为止。
e. 指北针定方位:打开磁针制动螺钉,松开磁针;转动镜筒,使指北针指向正北,并转动方位调整螺旋,使指北针的尖端对转磁针盒两条刻线,拨动刻度盘,使游尺“0”与方位盘上“0”对齐。使用指南针定方位,步骤同上,只是磁针的指向为正南。定好方位后,严禁转动调零手轮。
f. 瞄准远方的任意目标物,调焦距使目标物最清晰。
g. 操作变倍手轮,熟练掌握主、辅望远镜的转换方法。
2. 灌球和观测
a. 按天气条件确定气球型号、颜色。
b. 10号球采用100米/分升速。
c. 用当时的气温、气压查取标准密度升速值,用气球和附加物重量查取净举力。冲灌气球。
d. 施放气球,跟踪观测。每隔30秒读取仰角和方位角,在读数时应使气球正好聚中在十字线中间,并停止转动仰角和方位角手轮。读取10组。
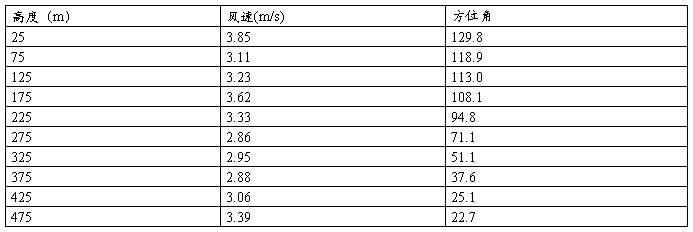
四、观测资料处理
1、列出两次观测的仰角和方位角,并用观测数据计算出不同高度的风向、风速。
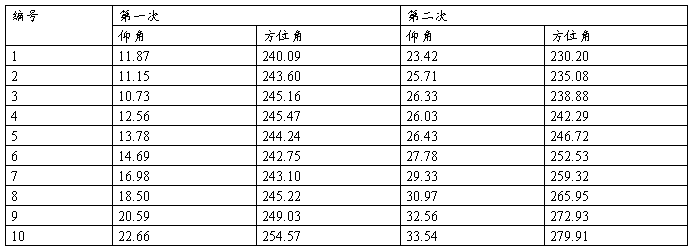
鉴于第一次观测为尝试,现使用第二次观测数据分析处理。
取南北方向为x轴(北为正),东西方向为y轴(东为正),气球水平面投影点的坐标分量为:
xn=Lncosαn.
yn=Lnsinαn.
其中
Ln=Hnctgβn。
αn为方位角,βn为仰角。
则相应层的风速:
Vn=[(xn-xn-1)2+(yn-yn-1)2]1/2/t.
其中t为相邻两次观测的时间间隔。
2、利用实测风速采用最小二乘法拟合出风速幂指数。
在近地层(250米以下),风速随高度的变化可用幂指数表示,其表达式为:
V2=V1(Z2/Z1)p ……①
其中,V1、V2分别为Z1、Z2高度处的风速(m/s),p为风廓线指数。
最小二乘法公式:
对于平面上的直线:y=a+bx 如有一组数据(xi,yi)
利用最小二乘法计算a,b时公式如下:
a=y0-bx0
b=∑(xi-x0)(yi-y0)/∑(xi-x0)2
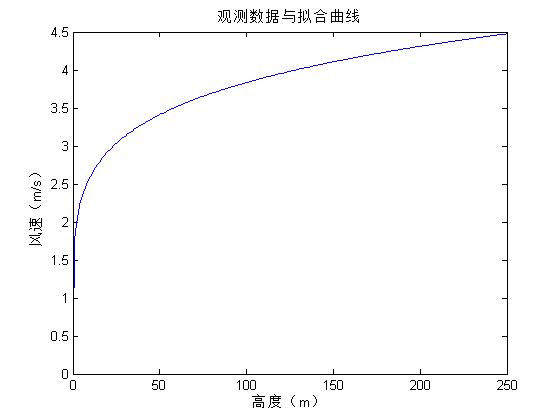
将①式取对数并编程(见附录)计算可得到:
风廓线指数P=0.16878
近地层风速表达式V=1.76272*Z^0.16878
画出拟合曲线与观测数据差异对比图:
3、误差分析。
实验误差来源可能有以下几个:
(1)实验观测存在误差,观测时气球不断运动,很难保证每次观测都在视野正中央。
(2)假设条件的理论误差,在计算气球升速时所用气压等条件可能与实际条件有出入,导致气球的升速并不是100m/s。
五、 实验总结
通过此次单经纬仪测风实验,了解了经纬仪测风的原理,初步掌握了电子式光学经纬仪的操作使用方法,学会了编程处理数据的方法。对近地层风速分布有了更深的认识。
附Fortran程序:
program main
implicit none
integer,parameter::n=10, f=4055, m=2
real(kind=1),parameter::pi=3.141592653
real(kind=1)::c(n,m)
real(kind=1)::a(n,m),vel(n,m)
real(kind=1):: h(n),y=0,x=0,sum1=0,sum2=0,b=0
integer::i=1,status=0
c=0
a=0
vel=0
h=0
open(unit=f,file="305-10.txt")
do while(.true.)
read(f,"(12x,f5.2,6x,f7.2)",iostat=status) a(i,1),a(i,2)
i=i+1
if(i>10) exit
end do
a=a*pi/180
do i=1,10
h(i)=i*50
end do
do i=1,10
c(i,1)=h(i)*cos(a(i,2))/tan(a(i,1))
c(i,2)=h(i)*sin(a(i,2))/tan(a(i,1))
end do
vel(1,1)=sqrt(c(1,1)*c(1,1)+c(1,2)*c(1,2))/30
vel(1,2)=90+atan(c(1,1)/c(1,2))*180/pi
do i=2,10
vel(i,1)=sqrt((c(i,1)-c(i-1,1))*(c(i,1)-c(i-1,1))+(c(i,2)-c(i-1,2))*(c(i,2)-c(i-1,2)))/30
vel(i,2)=90+atan((c(i,1)-c(i-1,1))/(c(i,2)-c(i-1,2)))*180/pi
end do
write(f,"(a2,8x,a1,17x,a1,12x,a1)")"n","x","y","h"
do i=1,10
write(f,"(I2,4x,f12.6,4x,f12.6,4x,f6.2)")i,coor(i,1),coor(i,2),h(i)
end do
write(f, "(2x,a1,10x,a1,14x,a5)") "h","v","angle"
do i=1,10
write(f, "(f6.2,f12.6,8x,f9.5)") h(i)-25,vel(i,1),vel(i,2)
end do
do i=1,5
y=log(vel(i,1))+y
x=log(h(i)-25)+x
end do
y=y/4
x=x/4
do i=1,5
sum1=(log(vel(i,1))-y)*(log(h(i)-25)-x)+sum1
sum2=(log(h(i)-25)-x)*(log(h(i)-25)-x)+sum2
end do
b=y-sum1/sum2*x
b=exp(b)
write(f,"( 'p=',f7.5)") sum1/sum2
write(f,"('V=',f7.5,'*Z^',f7.5)") b,sum1/sum2
close(f)
end
-
经纬仪的实验报告
班级建工1004学校九江职业技术学院实习时间20xx年10月9号实习课题经纬仪的测量实习目的增加学生的动手动脑测量能力实习内容测回…
-
经纬仪测角实验报告
中国矿业大学银川学院ChinaUniversityofMiningampTechnologyYinchuanCollege一实验目…
-
经纬仪水平角观测实验报告
经纬仪水平角观测实验报告一目的与要求1了解DJ6光学经纬仪的基本构造及主要部件的名称与作用23掌握测回法观测水平角的观测顺序记录和…
-
实验二 经纬仪的认识与使用
实验二经纬仪的认识与使用1目的1了解DJ6光学经纬仪的基本结构及主要部件的名称和作用2掌握经纬仪基本操作和读数方法2组织每组8一1…
-
精密经纬仪的认识和使用--试验内容
实验1精密经纬仪的认识和使用一试验目的和任务1认识J2经纬仪的组成部分和各部分的基本结构2掌握精密经纬仪的读数原理和读数方法3熟练…
-
银行员工个人年度工作总结报告
一、不断加强学习,进步本身素质。时代的发展已使银行业由一个最安稳的行业变成一个变化最为迅速,最富挑战性的行业,学习对银行业职员来讲…
-
二〇一二年度个人总结
姓名:牛以财单位:龙大项目职务:工程部副部长一年的时间很快过去了,在一年里,我在领导、部门领导、及同事们的关心与帮助下圆满的完成了…
-
焊工实训总结与体会
期盼的焊工实训终于来到,我很激动也很开心,很早的就来到实训工厂,一直都认为的慈祥的周老师也老早在那等着大家了,慢慢的人也多了,来到…
-
20xx年医务科工作总结
****职工医院20xx年,医务科在上级主管部门的指导下,在院领导的大力支持下,在各科室的积极配合下,坚持以病人为中心、以全面提高…
-
6中共习水县委组织部20xx年上半年工作总结
践行党员干部“五带头”促进经济社会大发展中共习水县委组织部(20xx年x月)今年以来,习水县委组织部紧紧围绕基层组织建设年活动这条…