机械手毕业设计开题报告

 理工学院
理工学院
毕业设计(论文)开题报告
题 目:铣床自动上下料点位控制机械手的设计
学生姓名: 韩抟彬 学 号: 10L0551370
专 业: 机械设计制造及其自动化
指导教师: 陈继荣
20##年3月31日
毕业设计开题报告
摘要;
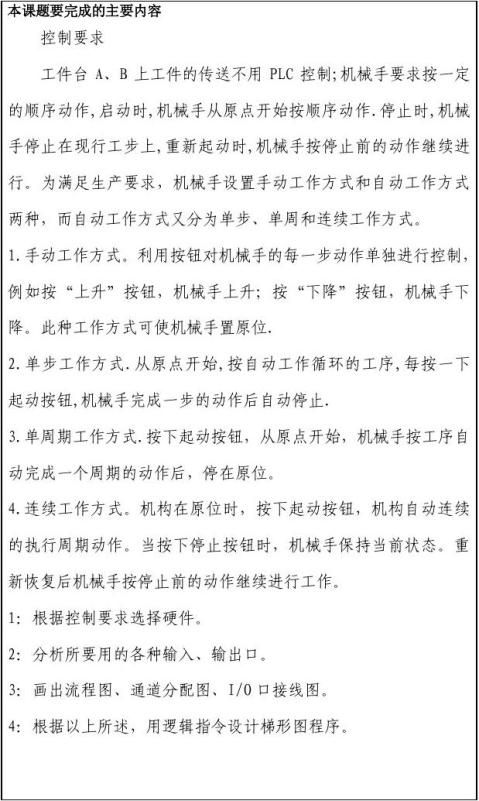
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其可靠性高、抗干扰能力强;PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息;PLC采用光电隔离和滤波技术有效抑制外部干扰源对PLC的影响,此外PLC还可在强、通用性好;开发周期短,功耗小。本课题对现代工业的的发展具有很重要的意义。
1.课题研究的目的和意义
1.1本课题的意义
机械手又名工业机器人,是近代自动控制领域中出现的一项新技术,并已成为现代科技的一个重要组成部分。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。因此,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
可编程控制器(PLC)是一种专门为工业应用而设计的进行数字运算操作的电子控制装置。由于其具有可靠性高,功能强,编程简单,人机交互界面友好等特性而广泛用于工业控制系统。
再者机械手是机电一体化的一个较为典型的设计,能较大程度的调用之前学过的基础及专业基础课程的知识,对于我个人来说也是检验自己四年来对所学的理论知识的掌握程度,对我个人来说也是意义重大的一次实践。
1.2机械手的发展情形与动态
从国内外所有机械手的发展现状来看,在现阶段,对机械手的研究和开发已趋于高潮,机械手的发展现状与动态,可以总结为:第一,模块化与可重构化是现阶段机械架构发展的主要动向;其二,PC 机的开放型控制器是机械手体系发展的一个主要方向,其目的就是为了完善机械手,使其逐渐走向网络化和标准化;器件集成度得以强化,架构设计玲珑,同时运用过了模块化架构;在很大程度上强化了机械手体系的安全性和可靠性,同时也满足机械手在维修和防护方面的一些便捷性;第三,传感器在机械手中发挥了十分重要的作用,不仅运用了传统的速度传感器、位置传感器等,同时也引进了先进的视觉传感器、触觉传感器和听觉传感器,促使机械手逐渐向智能化方向发展和推进;第四,装配、焊接等机械产品逐渐向模块化、标准化及系列化方向推进和发展,及系统动态的仿真等。
1.3 PLC的特点
(1)可靠性高、抗干扰能力强
高可靠性是电气控制设备非常关键的性能。PLC由于采用大规模集成电路技术、严格的生产工艺,内部电路采取了输入输出信号的光电隔离、滤波、电源的屏蔽、稳压和保护、故障诊断等先进的抗干扰技术,具有很高的可靠性,它能在高粉尘、高噪音、强电磁干扰和温暖变化剧烈的环境下正常工作。PLC的平均无故障时间可高达5﹣10万小时以上。从PLC的机外电路来说,PLC构成控制系统,和同等规模的继电接触器系统相比,电气接线及开关接点已减少到数百甚至数千分之一,故障率也就大大降低。
(2)功能完善、应用领域广
到现在为止PLC已经形成各种规模、系列化的产品。可以用于各种规模的工业控制场合,并能完成决大多数的工业控制任务。PLC所具有的完善的数据运算能力,可用于各种数字控制领域。近年来PLC的功能单元大量涌现,PLC通讯能力的增强及人机界面技术的发展,使用PLC组成各种控制系统变的非常容易。
(3)编程简单、易学易用
PLC采用和继电器电路图接近的梯形图语言,只用少量的开关量逻辑控制指令就可以方便地实现继电器电路的功能。在工业现场,可以使用手持编程器或笔记本对PLC进行编程。当PLC联网后,可以在网络的任一位置对PLC编程。为不熟悉电子电路、不懂计算机原理和汇编语言的人使用计算机从事工业控制提供了方便。
(4)系统安装简单、体积小、价格低
PLC在存储逻辑代替接线逻辑、采用模块化的结构,大大地减少了控制设备外部的接线,使控制系统设计及建设的周期大大缩短了。现代集成电路技术的广泛应用,功耗仅数瓦。由于PLC体积小很容易装入机械内部,是实现机电一体化的理想控制设备。使得PLC的重量越来越轻、功耗也越来越少。在集成电路技术和生产厂家越来越多的情况下,PLC的价格也越来越低。
1.4课题要求
本课题是为我校机电实验中心的柔性制造系统设计一个铣床自动上下料点位控制机械手。设备由机械手及其控制系统组成。用于实现生产线上铣床工位的自动上下料点位控制。学生也科根据自己的个人想法,在指导老师的指导下融入一些新的想法,大胆创新,充分调动自己的学习兴趣。
2.课题研究方案和主要内容
2.1总体方案的选定
方案1:XY导轨式机械手
机械手的两节手臂均采用伸缩工作方式,其大臂可以绕底座旋转,两节手臂可以采用气缸或者液压缸驱动。
方案2:关节回转式机械手
机械手的两节手臂军可以绕节点旋转,大臂还可以绕节点旋转,其底座也可以周向旋转, 其手指的工作角度不在拘泥于水平方向,灵活性相对较高。
综合比较:XY导轨式机械手的设计过程简单,操作简单,维护方便,加工成本要低很多,但其通用性差,设备笨重,导轨占用空间大,移动困难,功能简单,很多时候并不能满足加工现场的要求。第二种方案关节回转式机械手虽然设计过程复杂,操作需要一定的控制学基础,加工成本要高出很多,但其通用性强,只要更换不同的机械手指就可以满足不同的要求,另外其工作范围大,能更大程度的满足生产车间复杂的空间状况,可以独立于机床,方便移动,甚至可以加装导轨在机床与仓库间移动。
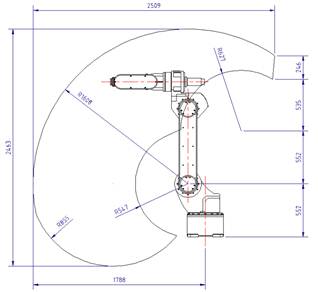
综合考虑,决定选用第二种方案。采用回转式底座,两节机械臂,分别可以在同一平面内绕关节旋转,两个关节均采用步进电机驱动。
2.2躯干的选型
躯干由底盘和手臂两大部分组成。底盘是支撑机械手全部重量并能带动手臂旋转的机构。底盘采用一个直流电动机驱动,底盘旋转时带动一个旋转码盘旋转,机械手每旋转3度发出一个脉冲,由传感器检测并送入可编程控制器,从而计算底盘旋转的角度。同时,在底盘上装有限位磁头,最大旋转角度可达270度。手臂是机械手的主要部分,它是支撑手爪、工件并使它们运动的机构。本设计中手臂两节机械手臂组成。两节手臂采用步进电动机作驱动源,直接驱动手臂旋转。由可编程控制器发出脉冲信号,经步进电动机驱动器驱动步进电动机旋转,完成手臂的运动。改变发出脉冲的个数,可控制手臂的两个手臂旋转的角度。同时在两轴的两端分别加限位开关限位。其大臂可绕底座旋转120度,小臂可绕大臂旋转160度。
2.3夹紧机构的选择
机械手手爪是用来抓取工件的部件,手爪抓取工件是要满足迅速、灵活、准确和可靠的要求。设计制造夹紧机构——手爪时,首先要从机械手的坐标形式、运行速度和加速度的情况来考虑。其加紧力的大小则根据夹持物体的重量、惯性和冲击力的大小来计算。同时考虑有足够的开口尺寸,以适应被抓物体的尺寸变化,为扩大机械手的应用范围,还需备有多种抓取机构,以根据需要来更换手爪。为防止损坏被夹的物体,夹紧力应限制一定的范围内,并镶有软质垫片、弹性衬垫或自动定心结构。为防止突然停电被抓物体落下,还可以有自锁结构。夹紧机构本身则应结构简单、体积小、重量轻、动作灵活和动作可靠。夹紧机构形式多样,有机械式、吸盘式和电磁式等。有的夹紧机构还带有传感装置和携带工具进行操作的装置。
机械式夹紧机构是最基本的一种,应用广泛,种类繁多,本设计采用机械式的夹紧机构,采用三指式气动手爪。由可编程控制器控制电磁阀动作,从而控制手爪的张闭,达到夹取工件的目的。
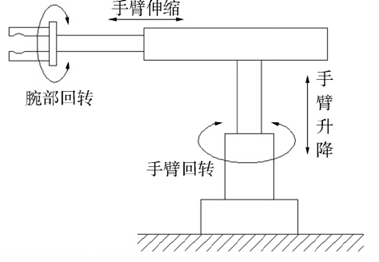
2.4机械手腕部结构的选择
如图所示
采用吊顶电扇回转式的机械结构,底部跟机械小臂相连,由步进电机驱动手腕摆动,采用这种特殊的结构不仅可以扩大机械手的工作范围,还增加了其灵活性,以满足生产车间复杂的工作要求,对其摆动的控制也较为简单,在应用中对其机构适当的调整,丰富其功能,提高机构的可靠性。
2.5 PLC的选用
西门子PLC, 具有多种不同的通信接口,并通过多种通信处理器来连接AS-I总线接口和工业以太网总线系统,可通过编程软件Step 7的用户界面提供通信组态功能,这使得组态非常容易、简单。综合考虑,本课题选用西门子的S7-200作为控制PLC。使用STEP 7 MicroWIN作为其编程软件。
3.实施计划
充分查阅相关资料,对方案中的大体结构细化拆分,构思选择合理的局部机械结构,练习CAXA实体设计制图软件,达到能够熟练运用CAXA制作三维图的目的。做出机械手的三维草图,边设计边修改,有不合理的地方及时纠正。完成之后就要进行零件的设计、电机的选型,以及其他附带部件的选用,机械结构校核的计算也在这一步进行。绘制部件的装配图及装配总图,之后就要进行PLC的编程了,并不断修改完善程序,做出其电气控制图。整理出设计说明书。整个设计过程要定期与指导老师沟通交流,接受老师的批评和建议。力求通过这次毕业设计使自己大学四年的理论学习能够熟练的运用到实际中,掌握一种学习方法,熟悉工业设计过程,实现由校园到企业的平缓过渡。
参考文献
[1]贺东坤,田明 气动通用上下料机械手结构设计A 长春大学学报1009-3907(2012)10-1171-03
[2]徐丽春 自动上下料通用机械手系统设计与研究B 液压与气动1000-4858( 2013) 08-0083-04
[3]孔祥志,刘春时 一种数控车床的摆臂式机械手设计A机械设计与制造1001-3997(2011)06-0169-02
[4]白平,薛佟 数控机床上下料机械手设计的流程 A 科技传播1674-6708(2012)68-0071-02 2012.6
[5]宋娟 上下料机械手PLC 控制系统设计 A装备制造技术1672-545X(2008)10-0054-02
[6]范世亮 三自由度上下料机械手的PLC 控制分析 A 机械工程师1002-2333(2012)02-0060-02
[7]周虹 气动与PLC 技术相结合在机械手设计中的应用 B 液压与气动10004858( 2004)
[8]张海英,刘胜明 基于PLC 的自动上下料机械手设计 B 装备制造技术1672-545X(2010)09-0070-02
[9]罗湛 基于PLC 的卸料机械手设计 B 液压与气动1000-4858( 2011) 05-0001-03
[10]张海英,陈子珍,翟志永 基于PLC 的物料搬运机械手设计 A 机械工程师1002-2333(2010)09-0083-02
[11]齐景荣 通用机械手设计及其控制 B 《装备制造技术》1672-545X(2013)07-0024-02
[12]黄贤新 工业机器人机械手设计 A 《装备制造技术》:1672- 545X(2012)03- 0220- 02
[13]王学良,张秋菊 基于PLC 的机械手自动上下料控制系统设计 B 中国制造业信息化1672 -1616(2012)15 -0059 -04
[14]杨永清,张嘉易,尚文利 汽车零件精段自动生产线机械手设计 B 制造业自动化1009-0134(2009)06-0096-03
[15]胡旭兰 生产线组合机床自动上下料机械手 B 机械制造1000—4998(2005)07—0032—03
[16]尹自荣 熊晓红 骆际焕 王建坤 数控上下料机械手的研究及应用 华中理工大学《锻压机械》
[17]邢金鹏 自动上下料机械手直臂部分的总体设计 学术展台《金田》总第295期
[18]郭洪红,贺继林等 工业机器人技术[M].西安电子科技大学
出版社,2006.
[19]王孙 关节式机械手本体及控制系统设计[M].西安交大机械 电子工程研究所,2009.
[20]蔡自兴 机器人学的发展趋势和发展战略[J].机器人技术与应用,2001(4):11-16.
[21]郭艳萍 基于PLC 的工业机械手控制系统[J].仪表技术与传感器,2007(9):31-32.
第二篇:机械手PLC控制毕业设计开题报告
乌海职业技术学院毕业设计开题报告
题 目 机械手PLC控制
学 院 乌海职业技术学院 专 业 机电一体化 班 级 12机电4班 学 号 2012850096 姓 名 邸强 指导教师 李志刚
-
机械类毕业设计开题报告
青岛大学机电工程学院开题报告青岛大学毕业设计论文开题报告题目汽车板簧下料工序的优化及设备改进学院机电工程学院专业机械工程及自动化姓…
- 机械专业毕业设计开题报告 范例
-
机械制造及自动化毕业设计开题报告[1]
攀枝花学院本科毕业设计论文开题报告题目CA6140车床后托架加工工艺及夹具设计院系攀枝花学院机电工程学院专业20xx级机械设计制造…
-
毕业设计开题报告 .机械类
湘潭大学机械工程学院本科毕业设计论文开题报告题目姓名专业指导教师填写时间20xx年3月隧道施工支护作业平台的设计学号教授机械设计制…
-
机械设计毕业设计开题报告
毕业设计论文开题报告题目专业机械设计制造及其自动化学号学生穆雄指导教师杨彬久答辩日期1课题来源及研究的目的和意义电极是熔焊时用以传…
- 机械专业毕业设计开题报告 范例
-
机械设计制造及自动化专业毕业设计开题报告
机械设计制造及自动化专业毕业设计开题报告毕业设计论文开题报告设计论文题目轻型车变速器设计机电工程系系别机械设计制造及其自动化专业姓…
-
毕业设计开题报告 .机械类
湘潭大学机械工程学院本科毕业设计论文开题报告题目姓名专业指导教师填写时间20xx年3月隧道施工支护作业平台的设计学号教授机械设计制…
-
机械类毕业设计开题报告
青岛大学机电工程学院开题报告青岛大学毕业设计论文开题报告题目汽车板簧下料工序的优化及设备改进学院机电工程学院专业机械工程及自动化姓…
-
机械专业毕业设计任务书及开题报告
齐齐哈尔大学毕业设计论文任务书及开题报告题目数控机床自动排屑装置的设计学院机电工程学院专业班级机械102学生姓名吉洪涛指导教师王雪…
-
机械手PLC自动控制系统的设计毕业设计开题报告
浙江工业职业技术学院毕业设计开题报告题目机械手PLC自动控制系统的设计分院电气工程分院专业电气自动化技术班级学号姓名指导教师