刚性转子动平衡实验实验报告
实验二 刚性转子动平衡实验
2010010130 土木工程系结02 胡皓宇
同组成员:陆胜寒、韩旭
实验日期:2011.11.08
一、 实验目的:
1. 掌握刚性转子动平衡的基本原理和步骤;
2. 掌握虚拟基频检测仪和相关测试仪器的使用;
3. 了解动静法的工程应用。
二、 实验内容
采用两平面影响系数法对一多圆盘刚性转子进行动平衡
三、 实验原理
工作转速低于最低阶临界转速的转子称为刚性转子,反之称为柔性转子。本实验采取一种刚性转子动平衡常用的方法—两平面影响系数法。该方法可以不使用专用平衡机,只要求一般的振动测量,适合在转子工作现场进行平衡作业。
根据理论力学的动静法原理,一匀速旋转的长转子,其连续分布的离心惯性力系,可向质心C简化为过质心的一个力R(大小和方向同力系的主向量 )和一个力偶M(等于力系对质心C 的主矩
)和一个力偶M(等于力系对质心C 的主矩 )。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R和力偶矩M的值均为零。这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
)。如果转子的质心在转轴上且转轴恰好是转子的惯性主轴,即转轴是转子的中心惯性主轴,则力R和力偶矩M的值均为零。这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。不平衡转子的轴与轴承之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
刚性转子动平衡的目标是使离心惯性力系的主向量和主矩的值同时趋近于零。为此,先在转子上任意选定两个截面I、II(称校正平面),在离轴线一定距离r1、r2(称校正半径),与转子上某一参考标记成夹角θ1、θ2处,分别附加一块质量为m1、m2的重块(称校正质量)。如能使两质量m1和m2的离心惯性力(其大小分别为m1r1ω2和m2r2ω2,ω为转动角速度)正好与原不平衡转子的离心惯性力系相平衡,那么就实现了刚性转子的动平衡。
两平面影响系数法的过程如下:
(1)在额定的工作转速或任选的平衡转速下,检测原始不平衡引起的轴承或轴颈A、B在某方位的振动量 和
和 ,其中V10和V20是振动位移(也可以是速度或加速度)的幅值,ψ1和ψ2是振动信号对于转子上参考标记有关的参考脉冲的相位角。
,其中V10和V20是振动位移(也可以是速度或加速度)的幅值,ψ1和ψ2是振动信号对于转子上参考标记有关的参考脉冲的相位角。
(2)根据转子的结构,选定两个校正面I、II并确定校正半径r1、r2。先在平面I上加一“试重”(试质量)Q1=mt1∠β1,其中m t1为试重质量,β1为试重相对参考标记的方位角,以顺转向为正。在相同转速下测量轴承A、B 的振动量V11和V21。
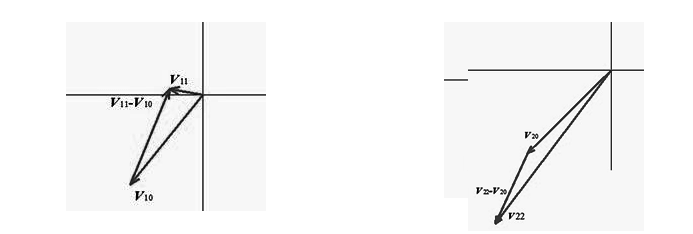
 矢量关系见图二a,b。显然,矢量V11?V10及V21?V20为平面I上加试重Q1所引起的轴承振动的变化,称为试重Q1的效果矢量。方位角为零度的单位试重的效果矢量称为影响系数。因而,我们可由下式求得影响系数。
矢量关系见图二a,b。显然,矢量V11?V10及V21?V20为平面I上加试重Q1所引起的轴承振动的变化,称为试重Q1的效果矢量。方位角为零度的单位试重的效果矢量称为影响系数。因而,我们可由下式求得影响系数。
(3)取走Q1,在平面II上加试重Q2=mt2∠β2,mt2为试重质量,β2为试重方位角。同样测得轴承A、B的振动量V12和V22,从而求得效果矢量V12?V10和V22?V20及影响系数
(4)校正平面I、II 上所需的校正质量p1=m1∠θ1和p2=m2∠θ2,可通过解下列矢量方程组求得:
m1,m2为校正质量,θ1,θ2为校正质量的方位角。
 及
及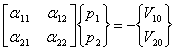
(5)根据计算结果,在转子上安装校正质量,重新起动转子,如振动已减小到满意程度,则平衡结束,否则可重复上面步骤,再进行一次修正平衡。
四、 实验装置:
1. 转子系统(转速0~4000r/min,临界转速≥5000r/min)
2. 调速器(调速500~4100r/min)
3. 光电变换器(位移0.1~2000μm)
4. 电涡流位移计(频率0~1000Hz,位移2mm峰峰值)
5. 电子天平(200±0.01g)
6. 微型计算机
五、 实验步骤:
(1)进入“刚性转子动平衡”程序。点击“设备虚拟连接”图标,进入试验设备的虚拟连接部分,根据实际实验设备的连接情况,参照图四进行连接。连接完毕后点击“连接完毕”按钮,如连接正确,即可进行下一步测试阶段。
(2)将转速控制器转速nb设定为1500r/min,起动转子1至2分钟使转速保持稳定。
(3)点击“基频检测”图标,进入基频检测部分。用鼠标左键按下工具栏左边第一个按钮“开”启动基频检测,用光标可以进行A、B两通道的显示切换,待读数基本稳定后,分别记录转子原始不平衡引起(A、B)两轴承座振动位移的幅值和相位角V10∠ψ1和V20∠ψ2。
(4)转速回零。在I平面(1号圆盘)上任选方位加一试重m t1,记录m t1的值(用天平测量,可取值在6~10 克之间)及固定的相位角β1(从黑带参考标记前缘算起。顺转向为正)。注意:在加试重时,不要触碰参考面(2号圆盘)上的探头,启动转子之前先用手慢慢转动圆盘,确认转子与探头没有碰触现象,间隙在1mm左右,否则报告教师重新调整探头位置。
(5)启动转子调到平衡转速nb,测出I平面加重后轴承座振动位移幅值和相位角(V11和V21)。
(6)转速回零。拆除mt1,在II平面上任选方位加一试重m t2。测量记录m t2及其方位角β2。
(7)转速重新调到nb。测出Ⅱ平面加试重后,轴承座振动位移幅值和相位角(V12和V22)。
(8)转速回零。取走mt2,单击“动平衡计算”图标进入动平衡计算部分,根据程序运行过程的提示,输入上述测量记录的数据。在CRT 显示计算校正质量。
(9)根据求出的校正质量(平衡质量)m1、m2及校正质量的相位角θ1、θ2,在校正平面I、II重新加重。然后将转速重新调到nb,再测量记录两个轴承座残余振动的幅值和相位角。
(10)转速回零。再返回“动平衡计算”部分,计算平衡率(即平衡前后振动幅值的差与未平衡振幅的百分比),如高于70%,实验可结束。否则应寻找平衡效果不良原因重做。
(11)停机、关仪器电源、拉电闸。拆除平衡质量,使转子系统复原。
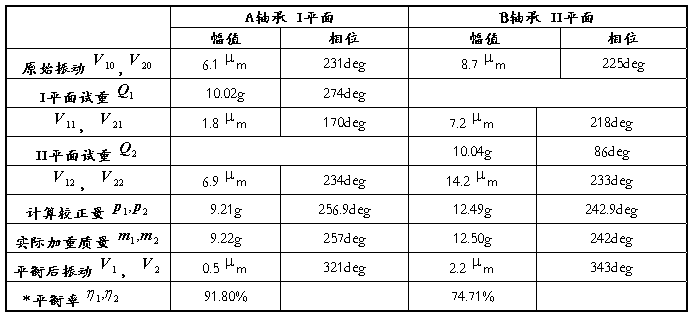
六、 数据记录及数据处理:
平衡转速nb= 1500 r/min 实验日期: 2011.11.08
七、 分析讨论:
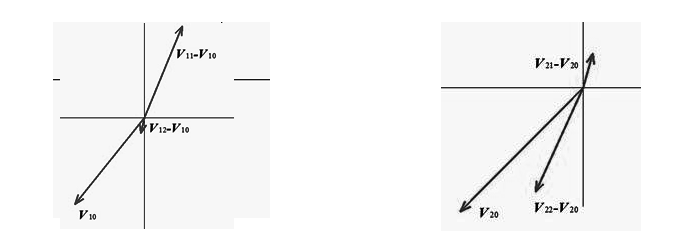
(1)
实测数据矢量关系图:
(2) 实验结果分析:实验中通过刚性转子动平衡校正,平衡率 分别达到91.80%和74.71%,满足实验要求。由实验结果可验证理论。另外,实验的主要误差来源之一是固定加载物的位置与计算值有一定偏差,其二是可能无法找到质量与计算结果完全相同的加载物。
分别达到91.80%和74.71%,满足实验要求。由实验结果可验证理论。另外,实验的主要误差来源之一是固定加载物的位置与计算值有一定偏差,其二是可能无法找到质量与计算结果完全相同的加载物。
(3) 实验方法讨论:实验过程中老师介绍的差量法适用于无法恰好找到与计算值相等的加载物的情况。主要操作步骤是称取两份加载物,使质量之差为所求理论质量值,将大质量加载物固定于所求角度值处,另一小质量加载物固定在对面相差180°处。这个方法可以一定程度上改善实验条件,但另一方面也增加了加载物固定位置带来的实验误差。另外,实验使用数字化测量的手段,将各种测量值(如位移)转化为电信号,增加测量精度,方便数据处理的同时也简化了测量过程。
第二篇:转子动平衡实验报告
山东明天机械有限公司

“转子动平衡”实验报告
一、 实验条件:
动平衡机型号:YYW-160 平衡方式 :去重 支撑方式:No:1 产品型号: 编号:
转子重量: kg 平衡速度:650 r/min
转子的半径:
左面平衡: cm 右面平衡: cm
二、 实验数据
实验员:牛其志 质检员:牛玉柱
-
刚性转子动平衡实验实验报告
实验二刚性转子动平衡实验20xx010130土木工程系结02胡皓宇同组成员陆胜寒韩旭实验日期20xx1108一实验目的1掌握刚性转…
-
转子动平衡实验报告
转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转子动平衡实验的原理及基本方法3了解动平衡试验机…
-
刚性转子动平衡实验报告
刚性转子动平衡实验浙江大学令狐烈一实验目的1掌握刚性转子动平衡的基本原理和步骤2掌握虚拟基频检测仪和相关测试仪器的使用二实验内容和…
-
实验五_刚性转子的动平衡实验
上海电力学院机械原理实验指导书实验五刚性转子的动平衡实验一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转子动平衡…
-
刚性转子动平衡实验实验报告
实验刚性转子动平衡实验任务书一实验目的1掌握刚性转子动平衡的基本原理和步骤2掌握虚拟基频检测仪和相关测试仪器的使用3了解动静法的工…
-
带传动-刚性转子动平衡实验报告
20xx年1带传动刚性转子动平衡实验报告带传动实验报告专业及班级姓名第次实验实验成绩同组人姓名日期一实验目的1了解带传动实验台的基…
-
转子动平衡实验报告
转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转子动平衡实验的原理及基本方法3了解动平衡试验机…
-
转子动平衡试验报告
转子动平衡实验报告姓名学号实验日期指导老师成绩转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转…
-
转子动平衡实验报告格式
转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转子动平衡实验的原理及基本方法3了解动平衡试验机…
-
刚性转子动平衡实验报告
刚性转子动平衡实验浙江大学令狐烈一实验目的1掌握刚性转子动平衡的基本原理和步骤2掌握虚拟基频检测仪和相关测试仪器的使用二实验内容和…
-
动平衡实验报告
硬支承动平衡实验报告实验目的1了解硬支承动平衡机的结构控制面板性能及操作方法2验证巩固和加深对基本理论的理解培养实验动手能力3掌握…