新 动平衡实验
实验五 机械转子动平衡
一、实验目的
1. 掌握机械转子动平衡的基本原理。
2. 熟悉机械转子动平衡的操作方法。
3. 了解机械转子振动信号的数据采集与分析处理。
二、实验设备
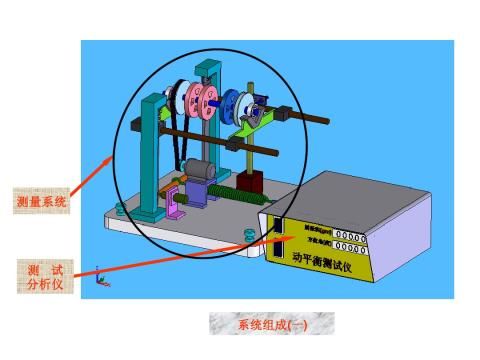
实验设备为DPH-I型智能动平衡机(见图1),由机械系统、计算机系统、机械与计算机接口三个部分组成。

图 1
1.机械系统
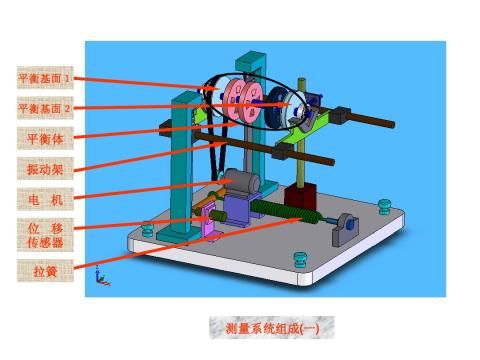
机械系统(见图2),主要由被试转子、硬支承摆架、传动带、电动机、减振底座等组成。
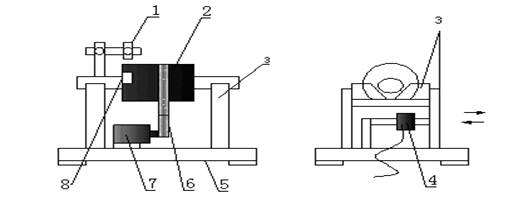
1.光电传感器 2. 被试转子 3.硬支承摆架组件 4.压力传感器
5.减振底座 6.传动带 7.电动机 8.零位标志
图2
2.计算机系统
计算机系统由标准配置计算机软硬件与动平衡实验应用程序组成。
动平衡实验应用程序由振动信号采集、选频滤波、动平衡分析计算等子程序组成。其主界面见图3。

图3
3.机械与计算机接口
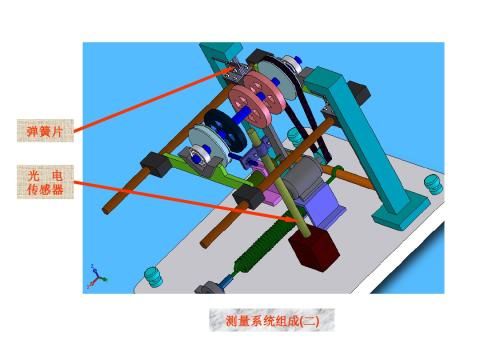
机械与计算机接口,由光电传感器、压力传感器,与数据采集卡组成。光电传感器安装在转子上方,用于测量转子转速。2只压力传感器分别安装在左右支承摆架,用于测量转子振动信号。数据采集卡嵌入在平衡机底座里面,通过信号数据线,从光电传感器、压力传感器接收信号,向计算机输出数据。
三、实验原理
在机械设备中,做旋转运动的零部件都可以称为机械转子。机械转子由于几何形状的不对称,材料的内部缺陷,不均匀的磨损与积尘,受力、受热变形等原因,都可能造成转子的中心惯性主轴与旋转轴线不重合,也即转子的不平衡。不平衡转子由于偏重的存在,做旋转运动时,将产生惯性力与惯性力偶,作用在支承上为交变载荷,使机械发生强迫振动。机械振动会导致机器运动不平稳,机械零件疲劳破坏,严重时会造成人员设备事故。
机械转子平衡,就是要重新调整不平衡转子的质量发布,使转子的中心惯性主轴与旋转轴线相重合。机械转子的平衡方法,根据转子的几何形状,可以分为静平衡和动平衡二种方法。对于轴向宽度b较小,直径d较大的盘状转子(b∕d<0.2),只需要进行静平衡就可以了。对于轴向宽度b较大,直径d较小的柱状转子(b∕d>0.2),必须进行动平衡。
1. 动平衡力学原理
对于柱状转子(b∕d>0.2)做动平衡,必须使转子的惯性力和惯性力偶都能得到平衡,即∑Pi=0,∑Mi=0。设一转子有偏重Q1及Q2分别位于平面1和平面2内,r1及r2为偏重的回转半径(见图4)。当转子以等角速度回转时,Q1及Q2将产生惯性力P1及P2,形成一空间力系。由理论力学可知,一个力可以分解为与它平行的两个分力。因此可以根据转子的结构,选定两个平衡基面I和II,作为安装配重的平面。将惯性力P1及P2分别分解到平衡基面I和II内,即将力P1及P2分解为P1I及P2I(在平面I内)及P1II及P2II(在平面II内)。这样就把空间力系平衡问题转化为两个平面汇交力系的平衡问题了。显然,只要在平面I和II内各加入一个合适的配重QI和QII,使两平面内的惯性力之和均等于零,构件也就平衡了。

图 4
2. 平衡机工作原理
当支承在摆架上的不平衡转子,被电机通过皮带拖动旋转后, 转子的偏重会产生惯性力, 迫使支架做强迫振动。安装在左右支架上的两个压力传感器,感受支承摆架的振动,产生两路包含有不平衡信息的压电信号,通过信号连接线,传输到数据采集卡。同时,安装在转子上方的光电传感器,接收转子上预贴光标的反射光,产生与转子旋转同频同相的脉冲信号,也传输到数据采集卡。(见图5)。

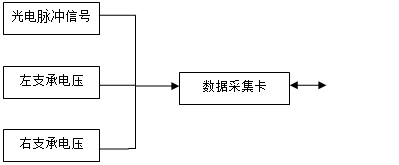
图 5
安装在计算机里面的动平衡实验应用程序,调用进入数据采集卡的三路信号,进行前置处理,跟踪滤波,幅度调整,相关处理,FFT变换,校正平面分离解算,最终算出左右两面的不平衡质量(g)、不平衡角度(°),显示在动平衡实验应用程序的主界面上。
3. 应用程序界面介绍
动平衡应用程序主界面(见图3),主要由参数输入区域、数据显示区域、操作命令按钮等组成。
(1).测试结果显示区。显示转子转速,左右不平衡质量、不平衡角度。
(2).转子结构显示区。显示 设置→模式设置(见图6)菜单下,选择的转子结构图。
(3).转子参数输入区。用于输入转子轴向尺寸与转子半径。
(4).振动原始数据显示区。显示当前采集到的原始振动信号曲线。
(5).数据分析曲线按钮。点击按钮可以对原始振动信号进行深入分析(见图7)。
(6).转子平衡程度显示图标。灰色为没有达到平衡,兰色为已经达到平衡。
(7).左右不平衡角度指示表盘。指针指示的角度为转子偏重的角度。
(8).自动采集按钮。
(9).单次采集按钮。
(10).复位按钮。
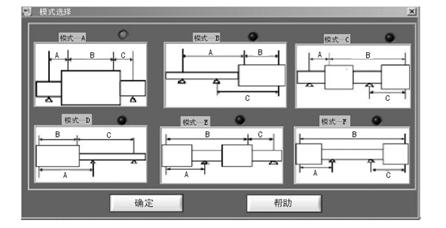
图6
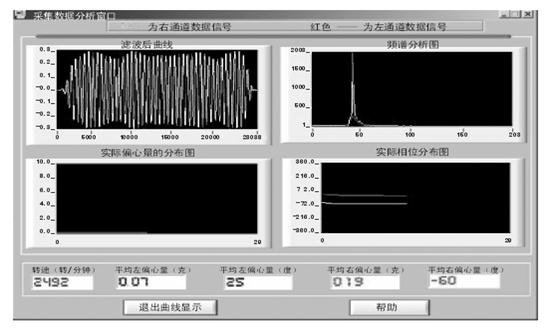
图7
 图8
图8
四、实验步骤
1 .进入动平衡实验系统。打开计算机,双击 动平衡实验系统 图标,进入动平衡实验系统主界面(图3)。
2.选择转子支承模式。点击主界面上的 设置→模式设置,在出现的图6中,选择一种合适的转子支承模式。本实验可以点击 模型A,确定 选择的两端支承模式。
3.确定转子几何参数。用测量工具量出转子的各轴向尺寸、转子半径,输入并且保存在转子参数输入区。
4.标定测试系统。选择两块任意质量的磁铁(如1.2g),分别安放在标准转子左右两侧的任意角度(如0°)上,作为标定测试系统的不平衡量。点击主界面上的 设置→系统标定,在图8的标定数据窗口,输入两个不平衡矢量的四个数据。打开实验台电源,打开电机开关。待机器运转平稳后(5分钟以上),点击 开始标定采集 按钮(见图8),测量数次(如10次)后,点击 保存标定结果 按钮。然后点击 退出标定 按钮,退出标定系统,回到主界面。
5.构造不平衡转子。关闭电机开关,停止机器运转。选择若干块任意质量的磁铁,任意安放在标准转子上,构造出实验用不平衡转子。也可以把做标定用的转子,直接作为实验用不平衡转子。
6 .预设允许不平衡质量。点击主界面右下方的 平衡质量 输入框,输入预设的允许不平衡质量(建议0.3g)。允许不平衡质量是由转子的使用条件,平衡精度,偏心距等估算出来的(此时可以不做深究)。
7 .动平衡测试。打开电机开关。待机器运转平稳后(5分钟以上),点击 自动采集 按钮,观察进入测试结果显示区的不平衡数据。待左右不平衡质量、不平衡角度,测试3~5次,稳定后,点击 停止测试 按钮。此时测试结果显示区的,左右不平衡质量为偏重质量﹔左右不平衡角度为偏重角度。
8 .动平衡校正。关闭电机开关,停止机器运转。选择两块略小于左右不平衡质量的磁铁,作为转子左右两个平衡基面的配重。在左右不平衡角度(偏重角度)的对面,分别把两块配重磁铁,添加到两个平衡基面上。
9 .检查动平衡校正结果。打开电机开关。待机器运转平稳后,点击 自动采集 按钮,继续观察测试结果显示区的不平衡数据。如果左右两面的不平衡质量,都小于预设的允许不平衡质量(如0.3g),就可以认为转子平衡好了。如果左右两面都没有小于预设的允许不平衡质量,就继续对两面进行动平衡校正。如果是一面没有小于允许的不平衡质量,就对该面继续校正。
五、实验数据分析
1 .转子偏心距估算
根据质径积不变公式: M .e = m .r
有 e = m .r / M
式中:M 为转子质量,e 为转子偏心距,m 为估算的偏心质量,r 为偏心质量半径
其中:M 可由称重或计算得出,
m = m左 + m右 ; m左 、m右 为左、右两面剩余不平衡质量
2 .平衡精度估算
根据国际标准组织制定的转子平衡等级,转子平衡精度A,可由下式计算
A = e .ω
式中:ω为转子转动的角速度(rad/s)
机 械 转 子 动 平 衡 实 验 报 告

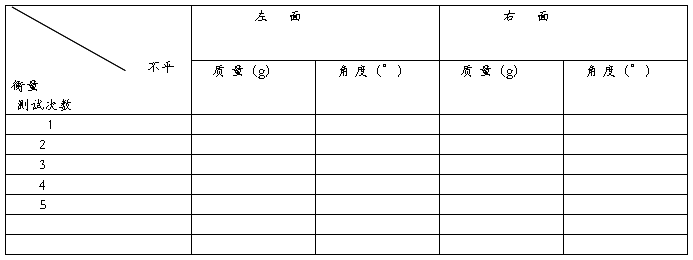
一、实验数据记录
二、实验数据分析
1 .转子偏心距估算
原始数据: 转子质量 M = , 偏心质量半径 r =
偏心质量 m左 = , m右 = , m = m左 + m右 =
偏心距估算: e = m .r / M =
2 .平衡精度估算
原始数据: 转子转速 n = , 转子角速度 ω =
平衡精度估算: A = e .ω =
3 .转子平衡精度等级:
G =
第二篇:第8章附 动平衡实验机简介

-
动平衡实验报告
硬支承动平衡实验报告实验目的1了解硬支承动平衡机的结构控制面板性能及操作方法2验证巩固和加深对基本理论的理解培养实验动手能力3掌握…
-
转子动平衡实验报告
转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转子动平衡实验的原理及基本方法3了解动平衡试验机…
-
转子动平衡试验报告
转子动平衡实验报告姓名学号实验日期指导老师成绩转子动平衡实验报告一实验目的1巩固转子动平衡知识加深转子动平衡概念的理解2掌握刚性转…
-
刚性转子动平衡实验实验报告
实验二刚性转子动平衡实验20xx010130土木工程系结02胡皓宇同组成员陆胜寒韩旭实验日期20xx1108一实验目的1掌握刚性转…
-
动平衡报告
动平衡报告1动平衡测试基础11关于动平衡的精度目前国内基本上都采用最小检测量这一指标来表征动平衡机的精度即e0按部颁标准定义最小检…
-
华师物化实验报告 双液系气-液平衡相图的绘制
华南师范大学实验报告学生姓名学号专业年级班级课程名称实验项目双液系气液平衡相图的绘制实验类型验证设计综合实验时间年月日实验指导老师…
-
双液系气—液平衡相图绘制实验报告
双液系气液平衡相图绘制实验目的用回流冷凝法测定沸点时气相与液相的组成绘制双液系相图找出恒沸点混合物的组成及恒沸点的温度掌握测定双组…
-
机械制造 实验报告 铁碳合金平衡组织观察与分析
实验项目名称铁碳合金平衡组织观察与分析一实验目的和要求必填1通过观察和分析熟悉铁碳合金在平衡状态下的显微组织熟悉金相显微镜的使用2…
-
不平衡数据实验报告
实验报告不平衡数据分类23020xx220xx66宿玥一不平衡数据的概况不平衡数据集在现实生活中广泛存在在不平衡数据集中数量少处于…
- 大学物理实验报告—非平衡电桥的应用