ЭМЯёИДдЪЕбщБЈИц 2

ЪЕ бщ БЈ Иц
ЪЕбщПЮГЬУћГЦ Ъ§зжЭМЯёДІРэ
ЪЕбщЯюФПУћГЦ ЭМЯёИДд
Фъ МЖ 2010
зЈ вЕ ЙтаХЯЂПЦбЇгыММЪѕ
бЇЩњаеУћ XXX
бЇ КХ XXXXX
Рэ бЇ дК
ЪЕбщЪБМфЃК 2013 Фъ 5 дТ 2 Ше
бЇдКЃКРэбЇдК зЈвЕЃКЙтаХЯЂПЦбЇгыММЪѕ АрМЖЃКЙтаХXXX

ЕкЖўЦЊЃКЭМЯёЛжИД(Ъ§зжЭМЯёДІРэЪЕбщБЈИц)
Ъ§зжЭМЯёДІРэзївЕ
ЁЊЁЊЭМЯёЛжИД
еЊвЊ
Ъ§зжЭМЯёЛжИДЪЧЪ§зжЭМЯёДІРэЕФвЛИіЛљБОЕФКЭживЊЕФПЮЬтЃЌЫќЪЧКѓЦкЭМЯёДІРэЃЈЗжЮіКЭРэНтЃЉЕФЧАЬсЁЃЭМЯёдкЩуШЁЁЂДЋЪфЁЂДЂДцЕФЙ§ГЬжаВЛПЩБмУтЕив§Ц№ЭМЯёжЪСПЕФЯТНЕЃЈЭМЯёЭЫЛЏЃЉЃЌЭМЯёЛжИДОЭЪЧЪдЭМРћгУЭЫЛЏЙ§ГЬЕФЯШбщжЊЪЖЪЙвбЭЫЛЏЕФЭМЯёЛжИДБОРДУцУВЃЌМДИљОнЭЫЛЏЕФдвђЃЌЗжЮів§Ц№ЭЫЛЏЕФЛЗОГвђЫиЃЌНЈСЂЯргІЕФЪ§бЇФЃаЭЃЌВЂбизХЪЙЭМЯёНЕжЪЕФФцЙ§ГЬЛжИДЭМЯёЁЃБОЮФЪзЯШЖдВтЪдЭМЯёНјааФЃК§МАМгдыДІРэЃЌШЛКѓгУВЛЭЌЕФЭМЯёЛжИДЗНЗЈЃЌШчЮЌФЩТЫВЈЛжИДЁЂдМЪјзюаЁЖўГЫТЫВЈНјааЭМЯёЛжИДЃЌВЂБШНЯЫќУЧЕФДІРэаЇЙћЁЃЗЂЯжЮЌФЩТЫВЈНЯдМЪјзюаЁЖўГЫЗЈТЫВЈаЇЙћвЊКУЃЌетЪЧвђЮЊЧАепРћгУСЫдЭМЯёЕФЭГМЦаХЯЂЃЌВЩгУСЫецЪЕЕФPSFКЏЪ§РДЛжИДЁЃЮоТлКЮжжЫуЗЈЃЌЫќУЧЖМвЊвРОнЛёШЁЕФЯрЙиаХЯЂВХФмгааЇЕиЪЕЪЉЃЌЫуЗЈРћгУЕФаХЯЂдНЖрЃЌаХЯЂЕФзМШЗаддНИпЃЌИДдЭМЯёЕФжЪСПвВОЭдНИпЁЃ
ЪЕбщдРэЃК
ЭМЯёИДдДІРэЪЧНЈСЂдкЭМЯёЭЫЛЏЕФЪ§бЇФЃаЭЛљДЁЩЯЕФЃЌетИіЭЫЛЏЪ§бЇФЃаЭФмЙЛЗДгГЭМЯёЭЫЛЏЕФдвђЁЃЭМЯёЕФЭЫЛЏЙ§ГЬПЩвдРэНтЮЊЪЉМггкдЭМЯёЩЯЕФдЫЫуКЭдыЩљСНепСЊКЯзїгУЕФНсЙћЃЌЭМЯёЭЫЛЏФЃаЭШчЭМ1ЫљЪОЃЌПЩвдБэЪОЮЊЃК
g ( x, y) = H [ f ( x, y)] + n( x, y) = f ( x, y) *h( x, y) + n( x, y) ЃЈ1ЃЉ
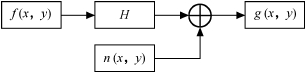
ЭМ1 ЭМЯёЭЫЛЏФЃаЭ
(1)дкВтЪдЭМЯёЩЯВњЩњИпЫЙдыЩљlenaЭМ-ашФмжИЖЈОљжЕКЭЗНВюЃЛВЂгУТЫВЈЦїЃЈздбЁЃЉЛжИДЭМЯёЃЛ
ЪЕбщдРэЃК
дыЩљЪЧзюГЃМћЕФЭЫЛЏвђЫижЎвЛЃЌвВЪЧЭМЯёЛжИДжажиЕубаОПЕФФкШнЃЌЭМЯёжаЕФдыЩљПЩЖЈвхЮЊЭМЯёжаВЛЯЃЭћгаЕФВПЗжЁЃдыЩљЪЧвЛжжЫцЛњЙ§ГЬЃЌЫќЕФВЈаЮКЭЫВЪБеёЗљвдМАЯрЮЛЖМЫцЪБМфЮоЙцдђБфЛЏЃЌвђДЫЮоЗЈОЋШЗВтСПЃЌЫљвдВЛФмЕБзіОпЬхЕФДІРэЖдЯѓЃЌЖјжЛФмгУИХТЪЭГМЦЕФРэТлКЭЗНЗЈНјааЗжЮіКЭДІРэЁЃБОЮФжабаОПИпЫЙдыЩљЖдЭМЯёЕФгАЯьМАЦфШЅдыЙ§ГЬЁЃ
ЂйИпЫЙдыЩљЕФВњЩњЃК
ЫљЮНИпЫЙдыЩљЪЧжИЫќЕФИХТЪУмЖШКЏЪ§ЗўДгИпЫЙЗжВМЃЈМДе§ЬЌЗжВМЃЉЕФвЛРрдыЩљЁЃвЛИіИпЫЙЫцЛњБфСПzЕФPDFПЩБэЪОЮЊЃК
PЃЈzЃЉ= ЃЈ2ЃЉ
ЃЈ2ЃЉ
ЦфжаzДњБэЛвЖШЃЌuЪЧzЕФОљжЕЃЌ ЪЧzЕФБъзМВюЁЃИпЫЙдыЩљЕФЛвЖШжЕЖрМЏжадкОљжЕИННќЁЃ
ЪЧzЕФБъзМВюЁЃИпЫЙдыЩљЕФЛвЖШжЕЖрМЏжадкОљжЕИННќЁЃ
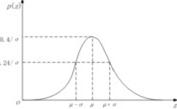
ЭМ2 ИпЫЙКЏЪ§
ПЩвдЭЈЙ§ВЛЭЌЕФЫуЗЈгУmatlabРДВњЩњИпЫЙдыЩљЁЃ
ЂкИпЫЙдыЩљЖдаХКХЕФгАЯь
дыЩљгАЯьЭМЯёДІРэЕФЪфШыЁЂВЩМЏЁЂДІРэЕФИїИіЛЗНквдМАЪфГіНсЙћЕФШЋЙ§ГЬЃЌдкЭМЯёжаМгИпЫЙдыЩљЭЈГЃЛсЪЙЭМЯёБфЕУФЃК§ВЂЧвЛсГіЯжЯИаЁЕФАпЕуЃЌЪЙЭМЯёБфЕУВЛЧхЮњЁЃ
ЂлШЅГ§ИпЫЙдыЩљЕФвЛаЉЗНЗЈ
ШЅГ§ИпЫЙдыЩљЕФЗНЗЈгажБЗНЭМБфЛЛЃЌЕЭЭЈТЫВЈЃЌИпЭЈТЫВЈЃЌФцТЫВЈЃЌЮЌФЩТЫВЈЃЌжажЕТЫВЈЕШЁЃБОЮФгІгУИпЫЙЦНЛЌТЫВЈНјааШЅдыДІРэЁЃ
ДІРэНсЙћШчЯТЭМЃК


ЮЌФЩТЫВЈЖдИпЫЙАздыЩљЕФЭМЯёТЫВЈаЇЙћНЯКУЃЌОпгаБШНЯКУЕФбЁдёадЃЌПЩвдИќКУЕиБЃДцЭМЯёЕФБпдЕКЭИпЦЕЯИНкаХЯЂЁЃЫљвдЃЌЮЌФЩТЫВЈдкДѓЖрЪ§ЧщПіЯТЖМПЩвдЛёЕУТњвтЕФНсЙћЃЌгШЦфЖдКЌгаИпЫЙдыЩљЕФЭМЯёЁЃ
(2)ЭЦЕМЮЌФЩТЫВЈЦїВЂЪЕЯжЯТБпвЊЧѓЃЛ
ЪЕбщдРэЃК


 ЮЌФЩТЫВЈзлКЯСЫЭЫЛЏКЏЪ§КЭдыЩљЭГМЦЬиадСНИіЗНУцНјааИДдДІРэЃЌЦфФПБъЪЧбАеввЛИіТЫВЈЦїЃЌЪЙЕУИДдКѓЭМЯё гыдЪМЭМЯё ЕФОљЗНЮѓВюзюаЁЃК
ЮЌФЩТЫВЈзлКЯСЫЭЫЛЏКЏЪ§КЭдыЩљЭГМЦЬиадСНИіЗНУцНјааИДдДІРэЃЌЦфФПБъЪЧбАеввЛИіТЫВЈЦїЃЌЪЙЕУИДдКѓЭМЯё гыдЪМЭМЯё ЕФОљЗНЮѓВюзюаЁЃК
вђДЫЮЌФЩТЫВЈЦїгжГЦЮЊзюаЁОљЗНЮѓВюТЫВЈЦїЁЃ
дкЦЕТЪжагУЯТЪНБэДяЃК

ЦфжаЃЌ ЪЧЭЫЛЏЭМЯёЕФИЕСЂвЖБфЛЛЃЌ
ЪЧЭЫЛЏЭМЯёЕФИЕСЂвЖБфЛЛЃЌ ЪЧЭЫЛЏКЏЪ§ЁЃ
ЪЧЭЫЛЏКЏЪ§ЁЃ ЃЌ
ЃЌ ЪЧЕФИДЙВщюЁЃ
ЪЧЕФИДЙВщюЁЃ ЃЌЮЊдыЩљЕФЙІТЪЦзЁЃ
ЃЌЮЊдыЩљЕФЙІТЪЦзЁЃ ЃЌЮЊЮДЭЫЛЏЭМЯёЕФЙІТЪЦзЁЃ
ЃЌЮЊЮДЭЫЛЏЭМЯёЕФЙІТЪЦзЁЃ
ЮЌФЩТЫВЈЦїЕФЭЦЕМЃК
КЯРэМйЩшвЊЙРМЦЕФаХКХf(x,y)ЮЊ0ОљжЕЦНЮШЫцЛњЙ§ГЬЃЌдыЩљЮЊ0ОљжЕЦНЮШЫцЛњЙ§ГЬЁЃ
g ( x, y) = h( x, y) * f ( x, y) +  ( x, y)
( x, y)

ИљОнвбЭЫЛЏЭМЯёg(x,y),РћгУЯпадЙРМЦЦї РДЙРМЦдЪМЭМЯёЁЃ
РДЙРМЦдЪМЭМЯёЁЃ
ЯШжЄЃК g ( x, y) = f ( x, y) + ( x, y)ЃЌ
зюаЁЛЏОљЗНЮѓВюЃК
 =
= ,
,
e(x,y)=f(x,y)? f?(x,y), f?(x,y)=w(x,y)*g(x,y)
зюаЁЛЏОљЗНЮѓВюПЩвдгЩе§НЛддђЧѓНтЃЌМДзюгХЧѓНтЕФЮѓВюгыЙлВтЕФаХКХжЕВЛЯрЙиЁЃ
ЕУЃК E[e(m, n ) g * (x, y)]= E[f(m,n)? f?(m,n)] g*(x, y)]=0
НјвЛВНЗжНтЕУЃК
E [f(m,n)g * (x, y)]=E[f?(m,n)g * (x, y)]
? = E { w(k1, k2 )[g (m?k1, n?k2)g*(x,y)]}
w(k1, k2 )[g (m?k1, n?k2)g*(x,y)]}
= E {w(k1, k2 )(Rg (m?k1-x, n?k2-y)}
=w(m-x,n-y)* Rg (m-x, n-y)
МЧЃК Rfg ( m-x, n-y)= E[f(m,n)g * (x, y)]
вђДЫЃЌ Rfg ( m, n)= w(m,n)* Rg (m, n)
ЩЯЪНзїFlouierБфЛЛЕУЃК
Pfg ( w1, w2)= W(w1, w2)* Pg (w1, w2)
МДЃК W(w1, w2)= Pfg ( w1, w2)/ Pg (w1, w2). ЃЈ3ЃЉ
гжгаЃК Rfg ( m-x, n-y)= E[f(m,n)g * (x, y)]
= E [f(m,n).[h (k1, k2)f(x-k1,y-k2)+(x, y)]*
= h *(k1, k2) Rf (m-x+ k1, n-y +k2)
= h *(-(m-x),-(n-y))* Rf (m-x, n-y)
вђДЫЃЌ Rfg ( m, n)= h *(-m,-n)* Rf (m, n)
ЖдЩЯЪНзїFlouierБфЛЛЕУЃК
Pfg ( w1, w2)= H*( w1, w2)Pf (w1, w2) ЃЈ4ЃЉ
ЭЌЪБЃЌ Rg (m-x, n-y)= E[g(m,n)g * (x, y)]
= E [h (k1, k2) f(m-k1,n-k2)+ (m,n)]
*[  h *(
h *(  1,2) f*(x-1,y-2)+ *(x, y)]
1,2) f*(x-1,y-2)+ *(x, y)]
=h (k1, k2) h *( 1,2) E[f(m-k1,n-k2)
f*(x-1,y-2)]+ E{(m,n) *(x, y)}
ЕУЃК Rg (m-x, n-y)
= h(k1,k2)h*(1,2) Rf (m-k1-x+1,n-k2-y+2) + R (m-x,n-y)
(m-x,n-y)
= Rf (m-x,n-y)* h(m-x,n-y)* h* (-(m-x),-(n-y))+ R (m-x,n-y)
ЫљвдЃЌ
Rg (m, n)= Rf (m,n)* h(m,n)* h*(-m,-n)+ R (m-x,n-y)
ЩЯЪНзїFlouierБфЛЛЕУЃК
Pg (w1,w2)= Pf (w1, w2)*H(w1, w2)*H*(-w1,-w2)+P(w1, w2)
=  Pf (w1, w2)+ P(w1, w2) ЃЈ5ЃЉ
Pf (w1, w2)+ P(w1, w2) ЃЈ5ЃЉ
злКЯвдЩЯЪНЃЈ3ЃЉЃЈ4ЃЉЃЈ5ЃЉПЩЕУЃК

ЭЦЕМЭъБЯЁЃ
(a) ЪЕЯжФЃК§ТЫВЈЦїШчЗНГЬEq.(5.6-11).
дкЭМЯёИДджаЃЌга3жжжївЊЕФЙРМЦЭЫЛЏКЏЪ§ЕФЗНЗЈЃК(1)ЭМЯёЙлВьЙРМЦЗЈ,(2) ЪдбщЙРМЦЗЈ,(3)ФЃаЭЙРМЦЗЈЁЃБОЮФЪЕЯжДгЛљБОдРэПЊЪМЭЦЕМЪ§бЇФЃаЭЕФФЃаЭЙРМЦЗЈЁЃЦфSFRЮЊЃК

ИљОнЩЯЪНЩшМЦТЫВЈЦїЃЌЪЕЯжЕФГЬађДњТыМћИНТМЁЃ
(b) ФЃК§lenaЭМЯёЃК45ЖШЗНЯђЃЌT=1ЃЛ
ИљОнЃЈaЃЉЫљЩшМЦЕФТЫВЈЦїДІРэЭМЯёЃЌаЇЙћШчЯТЭМЪОЃК

(c) дкФЃК§ЕФlenaЭМЯёжадіМгИпЫЙдыЩљЃЌОљжЕ=0ЃЌЗНВю=10 pixels вдВњЩњФЃК§ЭМЯёЃЛ
ДІРэНсЙћШчЯТЭМЪОЃЈГЬађДњТыМћИНТМЃЉЃК
(d) ЗжБ№РћгУЗНГЬEq. (5.8-2)КЭ(5.9-4)ЃЌЛжИДЭМЯёЃЛ
ПМТЧЕНЩшМЦЕФИДдгадвдМАЪБМфЕФгаЯоадЃЌБОДЮЪЕбщЕФЭМЯёИДдРћгУMATLABЪ§зжЭМЯёДІРэЙЄОпЯфРДЭъГЩЁЃ
ЂйЮЌФЩТЫВЈИДд
ГЬађжаЗТецСЫвЛИідЫЖЏФЃК§PSFЃЌЖддЭМЯёНјааФЃК§ВйзїЃЌВЂжИЖЈдЫЖЏЮЛвЦЮЊ50ИіЯёЫиЃЌдЫЖЏНЧЖШЮЊ45ЖШЁЃРћгУКЏЪ§deconvwnrНјааЮЌФЩТЫВЈИДдЭМЯёЃЌЕїгУИёЪНЮЊЃК
Wnr=deconvwnr(blurredNoisy,PSF);
MATLABДњТыМћИНТМЃЌЦфДІРэНсЙћШчЯТЭМЪОЃК
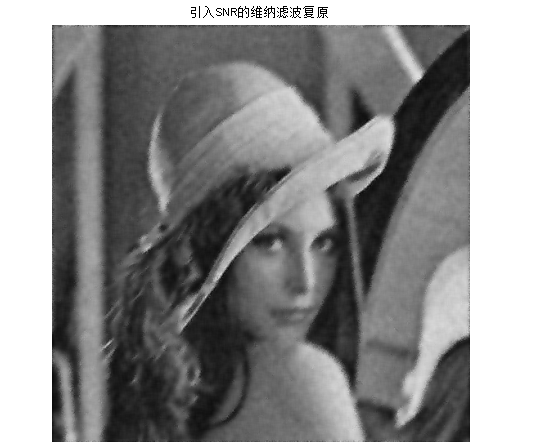
ПЩМћЃЌжБНггУЮоаХдыБШNSRВЮЪ§ЕФКЏЪ§deconvwnrНјааИДдЕФТЫВЈаЇЙћКмВюЃЌвђДЫв§ШЫаХдыБШNSRзїЮЊдыЩљВЮЪ§НјааЭМЯёИДдЃЌМДЃК
noise=imnoise(zeros(size(I)),ЁЏgaussianЁЏ,0,0.01);
NSR=sum(noise(:).^2)/sum(im2double(I(:)).^2);
Wnr=deconvwnr(blurredNoisy,PSF,NSR);
ДІРэНсЙћШчЭМЫљЪОЃК
ЂкзюаЁЖўГЫТЫВЈИДд
ЮЌФЩТЫВЈНЈСЂдкзюаЁЛЏЭГМЦзМдђЕФЛљДЁЩЯЃЌдкЦНОљвтвхЩЯЫќЪЧзюгХЕФЁЃБОНкЫљЬсЙЉЕФЫуЗЈОпгаЯджјЕФЬиЕуЖдгкДІРэЕФУПвЛЗљЭМЯёЫќЖМФмВњЩњзюгХНсЙћЁЃИљОнОэЛ§ЖЈвхЃЌга
HЖддыЩљУєИаЃЌЮЊСЫМѕЩйдыЩљУєИаадЮЪЬтЃЌвдЦНЛЌДыЪЉЕФзюМбИДдЮЊЛљДЁЃЌШчвЛЗљЭМЯёЕФЖўНзЕМЪ§(ЁАРЦеРЫЙБфЛЛЁБЫузг)ЁЃЕЋЪЧЃЌИДдБиаыБЛЫљгУЕНЕФВЮСПдМЪјЁЃвђДЫЃЌЖЈвхвЛИізюаЁЕФзМдђКЏЪ§CШчЯТЃК
 (6)
(6)
дМЪјЮЊЃК
 ЃЈ7ЃЉ
ЃЈ7ЃЉ
етРяЃЌ ЪЧХЗМИРяЕУЪИСПЗЖЪ§ЃЌ
ЪЧХЗМИРяЕУЪИСПЗЖЪ§ЃЌ ЪЧЮДЭЫЛЏЭМЯёЕФЙРМЦжЕЁЃЈ2 ЮЊРЦеРЫЙЫузгЁЃ
ЪЧЮДЭЫЛЏЭМЯёЕФЙРМЦжЕЁЃЈ2 ЮЊРЦеРЫЙЫузгЁЃ
етИізюМбЛЏЮЪЬтЕФЦЕгђНтОіЗНЗЈгЩЯТУцЕФБэДяЪНИјГіЃК
 (8)
(8)
етРяЃЌІУЪЧвЛИіВЮЪ§ЃЌЫќБиаыБЛЕїећвдЪЙЪН(7)ТњзуЬѕМўЃЌP(u,v)ЪЧКЏЪ§p(x,y)ЕФИЕРявЖБфЛЛЁЃ
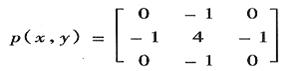 (9)
(9)
p(x,y)КЭЫљгаЦфЫћЯрЙиЕФПеМфгђКЏЪ§ЃЌдкгУЪН(8)МЦЫуЫќУЧЕФИЕРявЖБфЛЛжЎЧАвЊгУСуНјааЪЪЕБЕФбгЭиЃЌзЂвтЃЌЕБІУЮЊ0ЪБЃЌЪН(8)БфЮЊФцТЫВЈЁЃ
ИљОнЪНЃЈ8ЃЉЩшМЦдМЪјзюаЁЖўГЫТЫВЈЦїЃЌДІРэНсЙћШчЯТЭМЃК

НсЙћЗжЮіЃК
ЪЕбщжаЗЂЯжЃЌВЩгУЮЌФЩТЫВЈЛжИДПЩвдШЁЕУБШНЯКУЕФаЇЙћЃЌетИіЫуЗЈПЩвдЪЙЙРМЦЕФЕуРЉЩЂКЏЪ§жЕPSFИќМгНгНќЫќЕФецЪЕжЕЁЃдкЮвУЧжЊЕРФЃК§ЭМЯёЕФЕуРЉеЙКЏЪ§ЕФЧщПіЯТЃЌПЩвдЕїгУГЃЙцЕФЭМЯёИДдЫуЗЈЃЛЖјЯжЪЕРяЛЙЛсгіМћВЛжЊЕРЕуРЉеЙКЏЪ§ЕФЧщПіЃЌетИіЪБКђЮвУЧОЭПЩвдРћгУУЄОэЛ§ИДдЫуЗЈЁЃЫќЪЧРћгУдЪМЭМЯёФЃК§ЃЌЭЌЪБНјааЧхЮњЭМЯёЕФЛжИДКЭЕуРЉеЙКЏЪ§МЦЫуЕФвЛжжЗНЗЈЃЌвђДЫЃЌУЄОэЛ§ИДдЫуЗЈЕФгХЕуОЭЪЧЃЌЖдЪЇецЧщПіЛЙЮДжЊЕФЧщаЮЯТЃЌШдШЛФмЙЛВйзїЛжИДФЃК§ЭМЯёЁЃ
РћгУдМЪјзюаЁЖўГЫЗНЗЈЪЕЯжЖдЪмЕНдыЩљЕШвђЫиЫљИЩШХЕФЪ§зжЭМЯёЦфЛжИДЕФаЇЙћКЭдЪМЭМЯёЯрБШЛЙгавЛЖЈЕФВюОрЁЃНЈСЂдкИУЗНЗЈЕФЛљДЁЩЯЃЌвбОгаВЛЩйаТЕФЛжИДЫуЗЈВЛЖЯЕиБЛЬсГіЃЌЖјЧвЪЙЕУЖдЪ§зжЭМЯёЕФЛжИДгаСЫдНРДдНКУЕФаЇЙћЁЃЛжИДЕФЭМЯёДцдквЛЖЈЕФЁАЛЗЁБЃЌетаЉЛЗЪЧгЩЭМЯёЛвЖШБфЛЛНЯДѓЕФВПЗжЛђЭМЯёБпНчВњЩњЕФЁЃдкЭМЯёЛжИДДІРэжаЪЙгУЕФЗНЗЈКмЖрЃЌЕЋОпЬхЪЙгУФФвЛжжЃЌвЊАДееЭМЯёЕФЧщПізіОпЬхЗжЮіЃЌШЛКѓдйОіЖЈВЩгУФФжжЗНЗЈНјааЭМЯёЛжИДЁЃ
ИНТМ
вЛЁЂВЮПМЮФЯз
[1] ИдШјРзЫЙжј.Ъ§зжЭМЯёДІРэ(ЕкШ§Ац).ББОЉЃКЕчзгЙЄвЕГіАцЩчЃЌ2010
[2] жьЙкФЯжј.ЛљгкMATLABЕФЭМЯёИДдЩшМЦ. ММЪѕНЛСїЃЌ2009
[3] УЯгРЖЈ ТэМбжј.ЛљгкMATLABЪЕЯжЪ§зжЭМЯёЛжИД. ББОЉЃКЕчзгЙЄвЕГіАцЩчЃЌ2009
[4] СѕКьбв аьжОХєжј.ЛљгкMATLABЕФЪ§зжЭМЯёЛжИД.ИпаЃРэПЦбаОПЃЌ2008
[5] РюЙњСЂ ЖЮЩЧжј.ЛљгкдМЪјзюаЁЖўГЫЪ§зжЭМЯёЛжИД.ШЫЙЄжЧФмМАЪЖБ№ММЪѕЃЌ2008
[6] АйЖШЮФПт. http://wenku.baidu.com/view/c6f69cdb6f1aff00bed51ee0.htmlЃЌ20##-6
ЖўЁЂдДДњТыЃК
1ЁЂИпЫЙдыЩљЕФЬэМгвдМАТЫВЈДІРэ
I= imread('E:\ДѓШ§ЯТ\ЭМЯёДІРэгЂЮФПЮМў\зївЕ\ЕкСљДЮзївЕ\lena.bmp','bmp');
J=imnoise(I,'gaussian',0,0.01);
figure;
subplot(1,2,1);
imshow(I);
title('дДЭМЯёlena.bmp');
subplot(1,2,2);
imshow(J);
title('МгШыgaussianдыЩљКѓЕФlena.bmp');
n1=7;sigma1=1.5;n2=3;sigma2=1.5;theta=0;
r=[cos(theta) -sin(theta); sin(theta) cos(theta)];
for i = 1 : n2
for j = 1 : n1
u = r*[j-(n1+1)/2 i-(n2+1)/2]';
h(i,j)=exp(-u(1)^2/(2*sigma1^2))/(sigma1*sqrt(2*pi))*exp(-u(2)^2/
(2*sigma2^2))/(sigma2*sqrt(2*pi));
end
end
h = h / sqrt(sum(sum(h.*h)));
f1=conv2(J,h,'same');
subplot(1,2,2);
figure;
imagesc(f1);
title('ИпЫЙЦНЛЌКѓЕФlena.bmp(7x7)');
colormap(gray);
2ЁЂЭМЯёФЃК§МАЬэМгдыЩљ
ЂйЭМЯёЕФдЫЖЏФЃК§
I= imread('E:\ДѓШ§ЯТ\ЭМЯёДІРэгЂЮФПЮМў\зївЕ\ЕкСљДЮзївЕ\lena.bmp','bmp');
figure;
subplot(1,2,1);
imshow(I);
title('дДЭМЯёlena.bmp');
f=double(I); % Ъ§ОнРраЭзЊЛЛЃЌMATLABВЛжЇГжЭМЯёЕФЮоЗћКХећаЭЕФМЦЫу
g=fft2(f); % ИЕСЂвЖБфЛЛ
g=fftshift(g); % зЊЛЛЪ§ОнОиеѓ
[M,N]=size(g);
a=0.5;b=0.5;T=0.1;
m=fix(M/2);
n=fix(N/2);
j=sqrt(-1);
for i=1:M
for k=1:N
h=(T/(pi*(i*a+k*b)))*sin(pi*(i*a+k*b))*exp(-j*pi*(i*a+k*b));
end
result(i,k)=h*g(i,k);
end
result=ifftshift(result);
J1=ifft(result);
J2=uint8(real(J1));
subplot(1,2,2);
imshow(J2);
title('ФЃК§ЛЏlena.bmp');
ЂкЭМЯёМгды
figure;subplot(1,2,1);
imshow(J2);
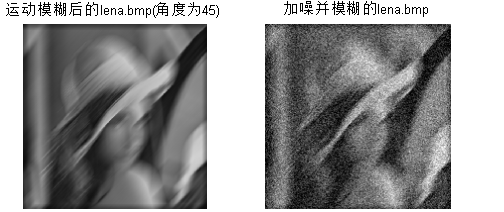
title('дЫЖЏФЃК§КѓЕФlena.bmp(НЧЖШЮЊ45)');
J3=imnoise(J2,'gaussian',0,0.01);
subplot(1,2,2);
imshow(J3);
title('МгдыВЂФЃК§ЕФlena.bmp');
3ЁЂЭМЯёЛжИД
ЂйЮЌФЩТЫВЈЛжИДЭМЯё
I= imread('E:\ДѓШ§ЯТ\ЭМЯёДІРэгЂЮФПЮМў\зївЕ\ЕкСљДЮзївЕ\lena.bmp','bmp');
H=fspecial('motion',50,45);
J=imfilter(I,H,'circular','conv');
figure;
subplot(1,2,1);
imshow(J);
title('дЫЖЏФЃК§КѓЕФlena.bmp(НЧЖШЮЊ45)');
J1=imnoise(J,'gaussian',0,0.01);
subplot(1,2,2);
imshow(J1);
title('МгдыВЂФЃК§ЕФlena.bmp');
%figure;
J2=deconvwnr(J1,H),[]);
imshow(J2);
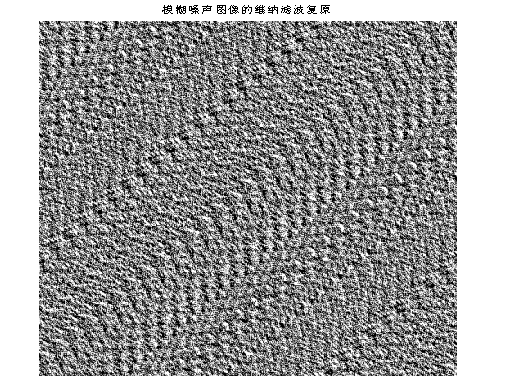
title('ФЃК§дыЩљЭМЯёЕФЮЌФЩТЫВЈИДд');
figure;
noise=imnoise(zeros(size(I)),'gaussian',0,0.01);
NSR=sum(noise(:).^2)/sum(im2double(I(:)).^2);
J3=deconvwnr(J1,H,NSR);
imshow(J3);
title('в§ШыSNRЕФЮЌФЩТЫВЈИДд');
ЂкдМЪјзюаЁЖўГЫЗНЗЈЛжИДЭМЯё
I= imread('E:\ДѓШ§ЯТ\ЭМЯёДІРэгЂЮФПЮМў\зївЕ\ЕкСљДЮзївЕ\lena.bmp','bmp');
I1=checkerboard(8);
PSF=fspecial('motion',50,45);
V=0.0001;
J=imfilter(I,PSF,'circular','conv');
J1=imnoise(J,'gaussian',0,0.01);
figure;subplot(1,2,1);
imshow(J1);
title('ФЃК§МгдыЭМЯё');
NoisePower=V*prod(size(I));
[G,LAGRA]=deconvreg(J,PSF,NoisePower);
subplot(1,2,2);
imshow(G);
title('дМЪјзюаЁЖўГЫТЫВЈИДд');