机械控制工程基础实验报告

中北大学机械与动力工程学院
实验报告
专业名称__________________________________
实验课程名称______________________________
实验项目数_______________总学时___________
班级______________________________________
学号______________________________________
姓名______________________________________
指导教师__________________________________
协助教师__________________________________
日期______________年________月______日____
实验二 二阶系统阶跃响应
一、实验目的
1.研究二阶系统的特征参数如阻尼比z和无阻尼自然频率wn对系统动态性能的影响;定量分析 z 和wn与最大超调量Mp、调节时间tS之间的关系。
2.进一步学习实验系统的使用方法。
3.学会根据系统阶跃响应曲线确定传递函数。
二、实验仪器
1.EL-AT-II型自动控制系统实验箱一台
2.PC计算机一台
三、实验原理
1.模拟实验的基本原理:
控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2. 时域性能指标的测量方法:超调量 :
:
1) 启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2) 测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通信正常后才可以继续进行实验。
3) 连接被测量典型环节的模拟电路。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。
4) 在实验课题下拉菜单中选择实验二[二阶系统阶跃响应] 。
5) 鼠标双击实验课题弹出实验课题参数窗口。在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6) 利用软件上的游标测量响应曲线上的最大值和稳态值,带入下式算出超调量:
YMAX - Y∞
=——————×100%
Y∞
tP与ts:利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态值所需的时间值,便可得到tP与ts。
四、实验内容
典型二阶系统的闭环传递函数为
w2n
 j(S)= (1)
j(S)= (1)
s2+2zwns+w2n
其中 z 和wn对系统的动态品质有决定的影响。
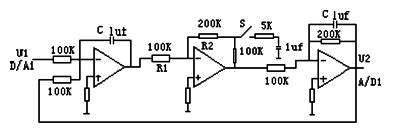
图2-1为典型二阶系统的模拟电路,要求测量其阶跃响应:
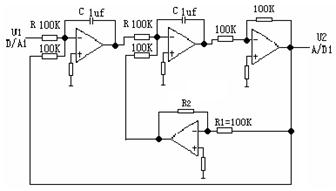
图2-1 二阶系统模拟电路图
电路的结构图如图2-2:
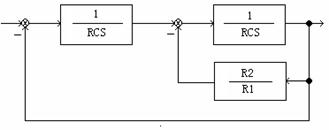
图2-2 二阶系统结构图
系统闭环传递函数为
 (2)
(2)
式中 T=RC,K=R2/R1。比较(1)、(2)二式,可得
wn=1/T=1/RC z=K/2=R2/2R1 (3)
由(3)式可知,改变比值R2/R1,可以改变二阶系统的阻尼比。改变RC值可以改变无阻尼自然频率wn。
今取R1=200K,R2=100KW和200KW,可得实验所需的阻尼比。电阻R取100KW,电容C分别取1mf和0.1mf,可得两个无阻尼自然频率wn。
五、实验步骤
1.连接被测量典型环节的模拟电路。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。
2.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
3.测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通信正常后才可以继续进行实验。
4.在实验课题下拉菜单中选择实验二[二阶系统阶跃响应], 鼠标双击该选项弹出实验课题参数窗口。
5.取wn=10rad/s, 即令R=100KW,C=1mf;分别取z=0.5、1、2,即取R1=100KW,R2分别等于100KW、200KW、400KW。输入阶跃信号,测量不同的z时系统的阶跃响应,并由显示的波形记录最大超调量s%和调节时间ts的数值和响应动态曲线,并与理论值比较。
6.取z=0.5,即取R1=R2=100KW;wn=100rad/s, 即取R=100KW,改变电路中的电容C=0.1mf(注意:二个电容值同时改变)。输入阶跃信号测量系统阶跃响应,并由显示的波形记录最大超调量s%和调节时间ts。
7.取R=100KW;改变电路中的电容C=1mf,R1=100KW,调节电阻R2=50KW。输入阶跃信号测量系统阶跃响应,记录响应曲线,特别要记录tp和s%的数值。
8.测量二阶系统的阶跃响应并记入表中:
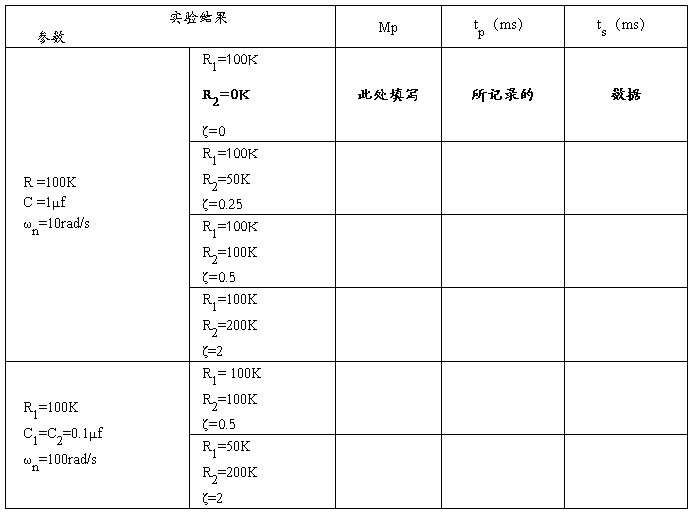
此处附截图
六、实验报告
1.画出二阶系统的模拟电路图,讨论典型二阶系统性能指标与ζ,ωn的关系.
2.把不同z和wn条件下测量的s%和ts值列表,根据测量结果得出相应结论. 3.画出系统响应曲线,再由ts和s%计算出传递函数,并与由模拟电路计算的传递函数相比较。
实验五 连续系统串联校正
一、实验目的
1. 加深理解串联校正装置对系统动态性能的校正作用。
2. 对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
二、实验仪器
1.EL-AT-III型自动控制系统实验箱一台
2.计算机一台
三、实验内容
1.串联超前校正
(1)系统模拟电路图如图5-1,图中开关S断开对应未校情况,接通对应超前校正。
图5-1 超前校正电路图
(2)系统结构图如图5-2
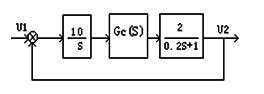
图5-2 超前校正系统结构图
图中 Gc1(s)=2
2(0.055s+1)
 Gc2(s)=
Gc2(s)=
0.005s+1
2.串联滞后校正
(1) 模拟电路图如图5-3,开关s断开对应未校状态,接通对应滞后校正。
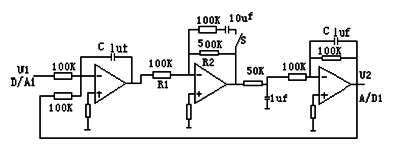
图5-3 滞后校正模拟电路图
(2)系统结构图示如图5-4
图5-4 滞后系统结构图
图中 Gc1(s)=10
10(s+1)
 Gc2(s)=
Gc2(s)=
11s+1
3.串联超前—滞后校正
(1)

模拟电路图如图5-5,双刀开关断开对应未校状态,接通对应超前—滞后校正。
图5-5 超前—滞后校正模拟电路图
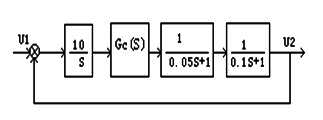
(2) 系统结构图示如图5-6。
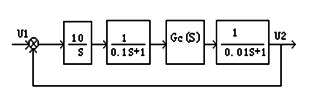
图5-6超前—滞后校正系统结构图
图中 Gc1(s)=6
6(1.2s+1)(0.15s+1)
 Gc2(s)=
Gc2(s)=
(6s+1)(0.05s+1)
四、实验步骤
超前校正:
1.连接被测量典型环节的模拟电路(图5-1)。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入,将将纯积分电容两端连在模拟开关上。检查无误后接通电源。
2.开关s放在断开位置。-
3.在实验项目的下拉列表中选择实验五[五、连续系统串联校正]。鼠标单击 按钮,弹出实验课题参数设置对话框。在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果,并记录超调量sp和调节时间ts。
按钮,弹出实验课题参数设置对话框。在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果,并记录超调量sp和调节时间ts。
6.开关s接通,重复步骤5,将两次所测的波形进行比较。并将测量结果记入下表中:

此处附图
滞后校正:
1.连接被测量典型环节的模拟电路(图5-3)。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入,将纯积分电容两端连在模拟开关上。检查无误后接通电源。
2.开关s放在断开位置。
3.在实验项目的下拉列表中选择实验五[五、连续系统串联校正]。鼠标单击按钮,弹出实验课题参数设置对话框,在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果,并记录超调量sp和调节时间ts。
4.开关s接通,重复步骤9,将两次所测的波形进行比较。并将测量结果记入下表中:

此处附图
第二篇:机械控制工程基础实验课实验报告
试验一数学模型的Matlab描述
一、实验目的
①掌握Malab中数学模型的三种表现形式
②掌握三种模型之间的转换方法
③掌握复杂传递函数的求取方法
④了解复杂系统表现形式及建模方法
二、实验要求
①在Matlab中实现三种数学模型的描述
②实现三种数学模型之间的转换
③写出试验报告
三、实验内容
Matlab中数学模型主要有三种形式:传递函数分子/分母多项式、传递函数零极点增益模型和状态空间模型。它们各有特点,有时需要在各种模型之间进行转换。
(1)已知系统传递函数
问题1:在Matlab中表示出该模型。
问题2:将其转换成零极点增益型。
(2)已知系统的传递函数
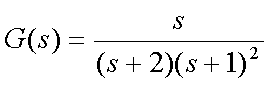
问题1:在Matlab中表示出该模型。
问题2:将其转换成状态空间型。
3、已知连续系统∑(A,B,C,D)的系数矩阵是:
 ,
,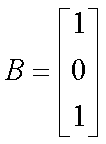 ,
,
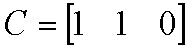 ,
,
问题1:在Matlab中表示出该模型。
问题2:将其转换成分子分母多项式型。
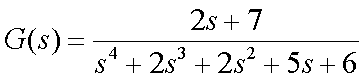
4、用Matlab表示传递函数为

的系统
试验二利用Matlab分析时间响应
一、 实验目的
①掌握impulse函数、step函数和lsim函数的用法
②掌握利用三种函数求解系统的时间响应
③掌握Matlab中系统时域性能指标的求解方法
④了解simulink中系统动态模型的建立方法
二、 实验要求
①用impulse、step和lsim函数对线形连续系统的时间响应进行仿真计算。
②在对系统进行单位阶跃响应的基础上,求取系统时域性能指标。
③写出试验报告。
三、 实验内容
(1)impulse函数、step函数和lsim函数的说明

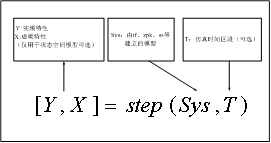
Impulse函数 step函数
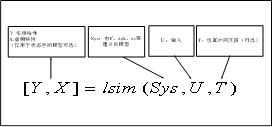
lsim函数
(2)求系统二阶系统 的单位脉冲响应、单位阶跃响应、正弦(
的单位脉冲响应、单位阶跃响应、正弦( )响应。
)响应。
(3)求系统的时间响应
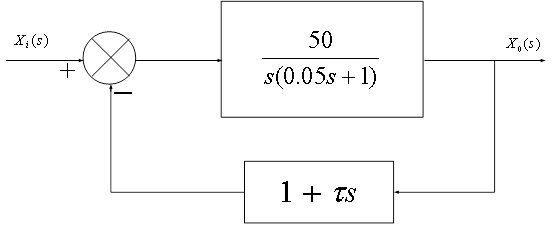
有一位置随动系统,其方框图如上图,该系统的传递函数
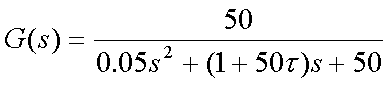
求系统在时间常数 时的单位阶跃响应;
时的单位阶跃响应;
(3)求系统的瞬态性能指标
在(2)中求出系统得单位阶跃响应后,求出系统的上升时间、峰值时间、最大超调量和调整时间等性能指标。
试验三利用Matlab分析频率特性
一、 实验目的
①掌握nyquist函数、bode函数的用法
②掌握nyquist图、bode图的绘制方法
③掌握Matlab中系统的频域特征量的求解方法
二、实验要求
①用nyquist函数绘制系统的nyquist图。
②用bode函数绘制系统的bode图。
③用Matlab求系统的频域特征量。
④写出试验报告
三、实验内容
1、用Matlab绘制Nyquist图
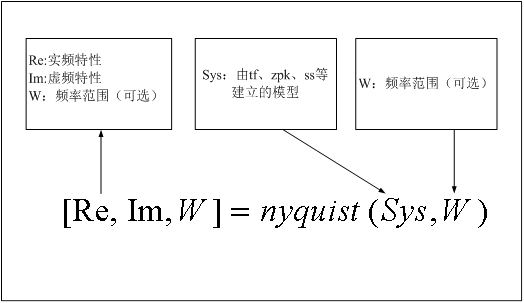
用Matlab绘制传递函数为
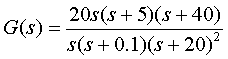
的系统的Nyqist图。
2、用Matlab绘制Bode图
用Matlab绘制传递函数为
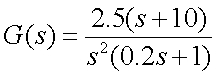
的系统的bode图。
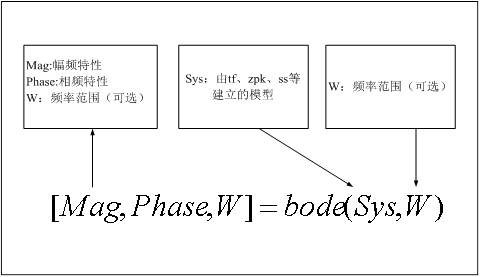
3、用Matlab求系统的频域特征量
对于传递函数为
的系统,用bode函数求得不同频率下,系统得幅频特性,从而根据定义计算出系统的频域特征量。
试验四利用Matlab分析系统稳定性
一、实验目的
①掌握roots函数、margin函数的用法
②掌握Matlab中系统特征根的求解方法
③掌握Matlab中系统稳定性的判定方法
二、实验要求
①用roots函数求解系统特征方程的特征根并判定系统的稳定性。
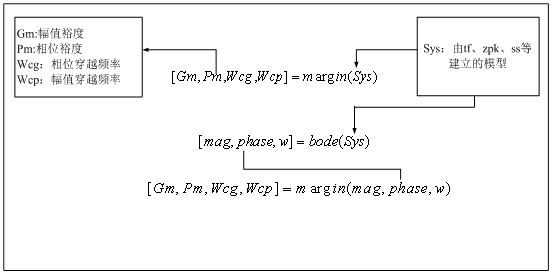
②用margin函数求出系统的幅值裕度、相位裕度、幅值穿越频率和相位穿越频率,并判定系统的相对稳定性。
③写出试验报告
三、实验内容
1、 利用Matlab求系统的特征根
(1)设系统的特征方程为

用Matlab的roots函数求出系统的所有的特征根,从而判定系统是否稳定。
(2) 设系统特征方程为 ,试计算特征根并判别该系统的稳定性。
,试计算特征根并判别该系统的稳定性。
2、 利用Matlab分析系统的相对稳定性
(1) 已知某系统开环传递函数为 ,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
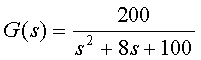
(2) 已知控制系统的开环传递函数为
应用margin函数求K=10及K=100其幅值裕度、相位裕度、幅值穿越频率和相位穿越频率,从而判断系统稳定性的变化。
(3)已知某系统开环传递函数为 ,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
,试用Bode图法判断闭环系统的稳定性,并用阶跃响应曲线验证。
-
控制工程基础实验报告
控制工程基础实验报告姓名班级学号目录实验三131实验目的132实验内容133实验结果2实验四1541实验目的1542实验内容154…
-
机械控制工程基础实验报告
中北大学机械与动力工程学院实验报告专业名称实验课程名称实验项目数总学时班级学号姓名指导教师协助教师日期年月日实验二二阶系统阶跃响应…
- 机械控制工程基础实验报告
-
控制工程基础 实验报告
控制工程基础课程实验报告班级学号91211020xx25姓名南京理工大学20xx年1月1控制工程基础课程仿真实验一已知某单位负反馈…
-
清华大学精仪系--控制工程基础--实验内容与实验报告
实验内容一直流电机双环调速系统实验此时必须松开连轴节不带动工作台1测试电流环特性由于外接霍尔传感器只有一套有五套PWM放大器有电流…
-
《机械工程控制基础》Matlab仿真实验报告单(实验二) - 副本
红河学院工学院实验报告单机械工程控制基础Matlab仿真实验报告单课程名称机械工程控制基础实验姓名日期20xx126成绩年级专业2…
-
《机械工程控制基础》Matlab仿真实验报告单(实验三)
红河学院工学院实验报告单机械工程控制基础Matlab仿真实验报告单课程名称机械工程控制基础实验姓名锁鹏飞日期20xx1213成绩年…
- 机械控制工程基础实验报告
-
控制工程基础 实验报告
控制工程基础课程实验报告班级学号91211020xx25姓名南京理工大学20xx年1月1控制工程基础课程仿真实验一已知某单位负反馈…
-
控制工程基础实验报告
控制工程基础实验报告姓名班级学号目录实验三131实验目的132实验内容133实验结果2实验四1541实验目的1542实验内容154…
-
机械制造及其自动化毕业实习报告
目录一、概述...........................................................…