控制工程基础 实验报告


《控制工程基础》课程实验报告
班级: 9121102001
学号: 912110200325
姓名:
南京理工大学
20##年1月
《控制工程基础》课程仿真实验
一、 已知某单位负反馈系统的开环传递函数如下 (25分)
借助MATLAB和Simulink完成以下要求:
(1) 把G(s)转换成零极点形式的传递函数,判断开环系统稳定性。
MATLAB程序:
clear;
num=[10];
den=[1 5 25];
sys=tf(num,den);
[Z,P,K]=tf2zp(num,den)
零极点形式的传递函数: 
由于极点均在左半平面,所以开环系统稳定。
(2) 计算闭环特征根并判别系统的稳定性,并求出闭环系统在0~10秒内的脉冲响应和单位阶跃响应,分别绘出响应曲线。
闭环传递函数 
特征方程
特征根 
由于根在左半平面,所以系统稳定。
用simulink仿真:
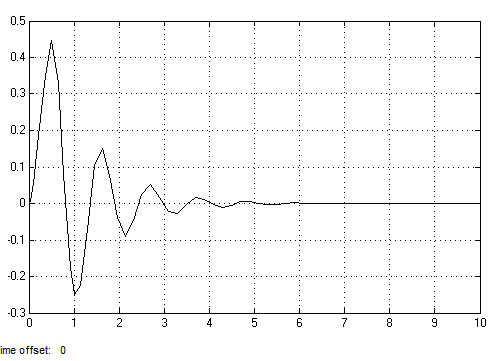
脉冲响应:
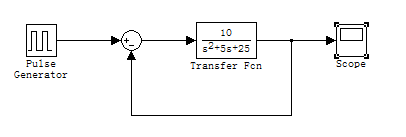
结果:
阶跃响应:
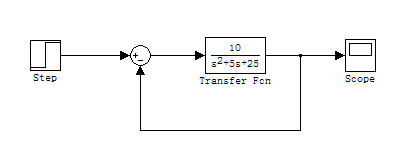
结果:
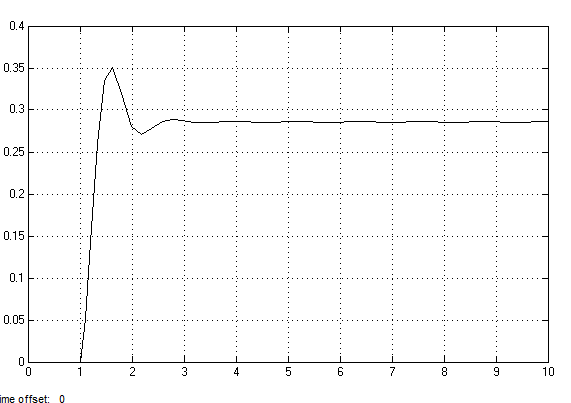
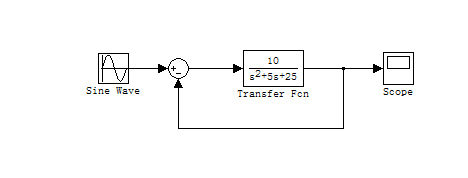
(3) 当系统输入 时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。
曲线:

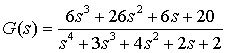
二、 (25分)某单位负反馈系统的开环传递函数为:
 频率范围
频率范围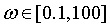
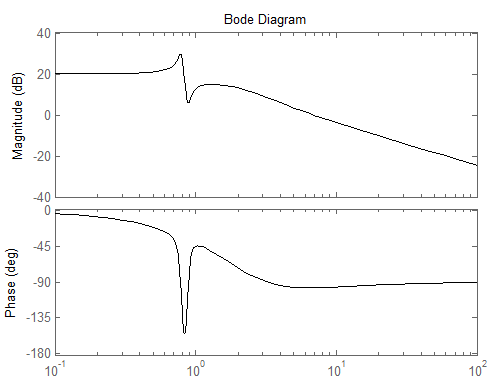
(1) 绘制频率响应曲线,包括Bode图和幅相曲线(Nyquist图)。
Matlab语句:
clear;
num=[6 26 6 20];
den=[1 3 4 2 2];
sys=tf(num,den);
bode(sys,{0.1,100})
Bode图:
Matlab语句:
clear;
num=[6 26 6 20];
den=[1 3 4 2 2];
sys=tf(num,den);
[z , p , k] = tf2zp(num, den)
nyquist(sys)
Nyquist图:
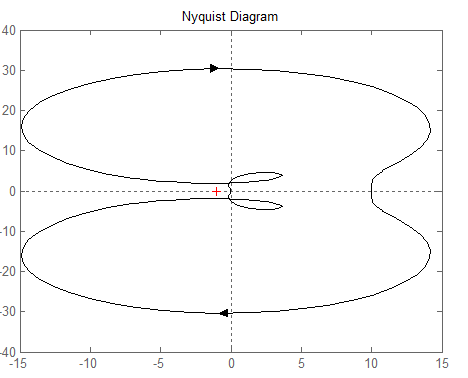
(2) 根据Nyquist判据判定系统的稳定性。
P=0 N=0 Z=P+N=0 所以系统稳定
(3) 根据Bode图求出系统的截止频率 以及幅值裕度与相位裕度。
以及幅值裕度与相位裕度。
Matlab语句:
clear;
num=[6 26 6 20];
den=[1 3 4 2 2];
sys=tf(num,den)
margin(sys)
图形:
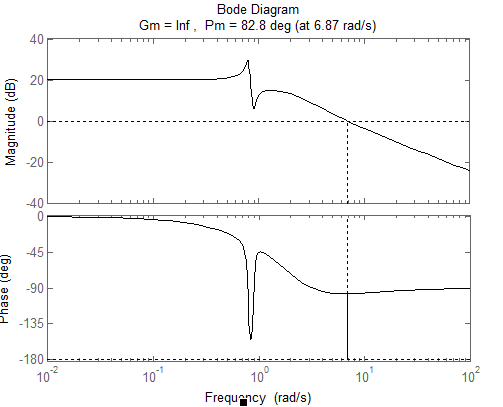
由图可得截止频率 =6.87rad/s,幅值裕度无穷大,相位裕度为82.8deg
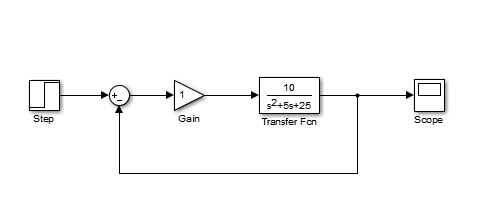
三、 (25分)某单位负反馈系统如下图所示,
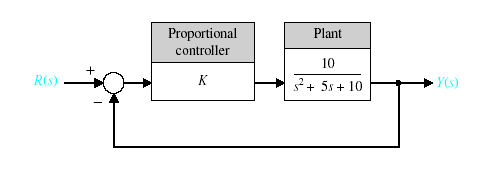
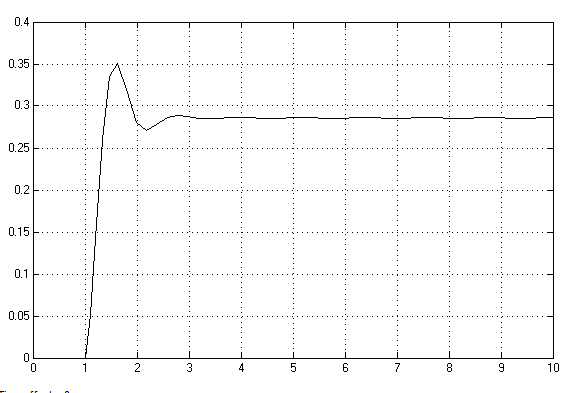
(1) 当比例控制器增益K=1时,在Simulink中搭建系统,当输入为阶跃函数时,用示波器观察系统的输出,绘出响应曲线,并求出系统在阶跃输入下的超调量( )和峰值时间(
)和峰值时间( )。
)。
Simulink仿真:
结果:
求超调量和峰值时间:
程序如下:
num=[10];
den=[1 5 10];
[num2,den2]=cloop(num,den,-1)
sys2=tf(num2,den2);
[y,t,x]=step(sys2)
mp=max(y);
tp=spline(y,t,mp)
cs=length(t);
yss=y(cs)
ct=(mp-yss)/yss
结果:
系统阶跃响应的超调量 为11.84%。
系统的峰值时间tp为0.8393s
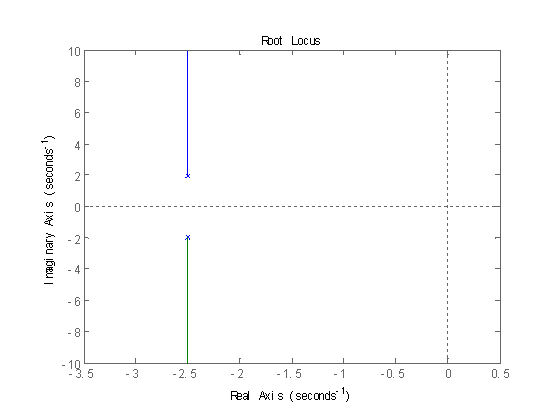
(2) 绘制当 变化时,闭环系统的根轨迹。
变化时,闭环系统的根轨迹。
Matlab语句:
clear;
num=[10];
den=[1 5 10];
sys=tf(num,den);
[r,K]=rlocus(sys)
rlocus(sys)
根轨迹图:
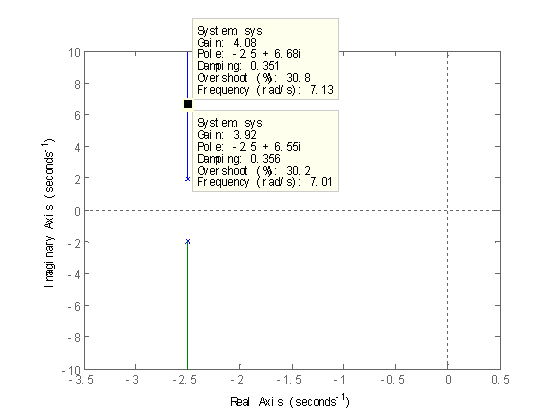
(3) 根据以上根轨迹,为使闭环系统在阶跃输入下超调量 且稳态误差
且稳态误差 ,确定控制器增益
,确定控制器增益 的范围。
的范围。
由稳态误差公式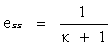 可知,要使ess<0.2,则K>4。
可知,要使ess<0.2,则K>4。
而由下图可知,当K=3.92时, =30.2% >30% 且 随K增大而增大,所以不存在符合的K值。
随K增大而增大,所以不存在符合的K值。
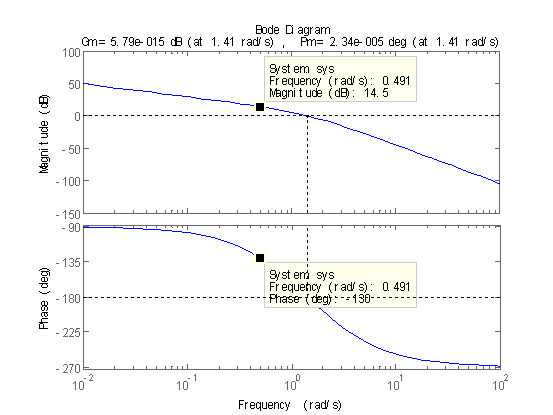
四、 (25分)若某单位反馈控制系统的开环传递函数为
(1) 借助MATLAB和控制工具箱设计串联滞后校正网络,使校正后系统的静态速度误差系数 ,且相角裕度不低于
,且相角裕度不低于 。
。
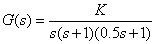
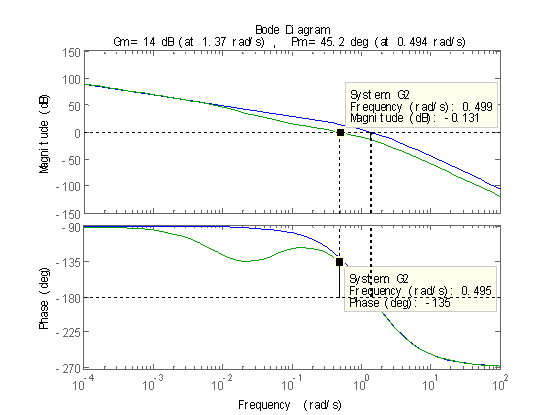
由题意得K=3,取相角裕度为50,利用matlab画出bode图
Matlab程序:
clear;
num=[3];
den=[0.5 1.5 1 0];
sys=tf(num,den);
margin(sys)
Bode图:
由上图得20log =14.5→=5.309 , z=0.1*0.491=0.0491 , p=z/=0.00924
=14.5→=5.309 , z=0.1*0.491=0.0491 , p=z/=0.00924
矫正后开环传递函数为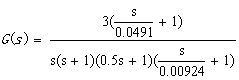
验证此时的相位裕度和幅值裕度。
Matlab程序如下:
num=[3];
den=[0.5 1.5 1 0];
[num2,den2]=series(num,den,[20.367 1],[108.225 1]);
G1=tf(num,den);
G2=tf(num2,den2);
figure(2);
margin(G1);
grid on
hold on
margin(G2);
grid on
hold on
[Gm1,Pm1,Wcg1,Wcp1]=margin(G1)
[Gm2,Pm2,Wcg2,Wcp2]=margin(G2)
结果如下:
此时相角裕度为45度,符合要求。
(2)绘制系统在校正前后的单位阶跃响应曲线,计算校正前后的时域性能指标( 等)并进行对比分析。
等)并进行对比分析。
校正前的单位阶跃响应:
Matlab程序如下:
num=[3];
den=[0.5 1.5 1 0];
G1=tf(num,den);
step(feedback(G1,1),10)
grid on
结果如下:
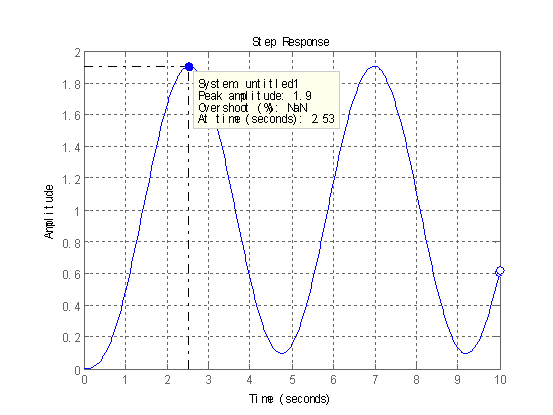
可见峰值时间tp为2.53s,由于响应不稳定所以无超调量和调节时间
校正后:
Matlab程序如下:
num=[3];
den=[0.5 1.5 1 0];
[num2,den2]=series(num,den,[20.367 1],[108.225 1]);
G2=tf(num2,den2);
step(feedback(G2,1))
grid on
结果如下:
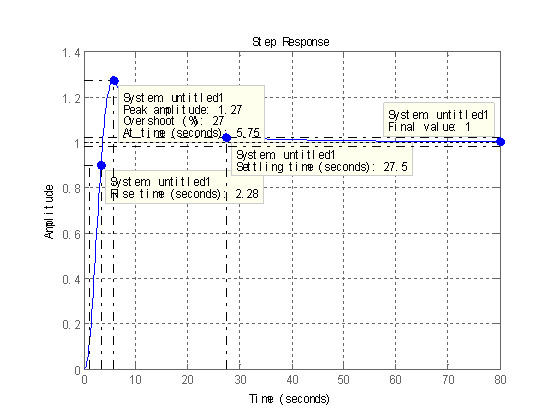
由图可看出,超调量 =27%,峰值时间tp为5.75s,上升时间tr为2.28s,调节时间ts为27.5s。
由此可看出,采用串联滞后网络校正系统后截止频率变小,单位阶跃响应的峰值时间增大 ,并且响应变为稳定。
实验总结:
通过这次仿真实验,我对于《控制工程基础》这门课有了更深刻的认识与体悟。MATLAB软件,已不是第一次用了,这次实验我又学会了一些技巧,学会了如何利用matlab工具设计开环与闭环系统,如何画出它们的Bode图和在各种输入量下的响应曲线,如何设计串联超前和滞后网络来满足系统传递函数需要达到的要求。
以前总感觉,作业中的一些图难画不好看,现在看到电子版的图,更清晰真实,对书上的知识有了更深的认识。让我看到了一些知识与实践结合的地方,根据图像,能看出它的很多特性和应用的合理性。
此次实验,提高了我分析和解决实际问题的能力,不懂的地方也找同学问明白了。最后,我还是喜欢这门课的,以前都是学纯理论的课程,现在学到的理论与实践结合的方式。
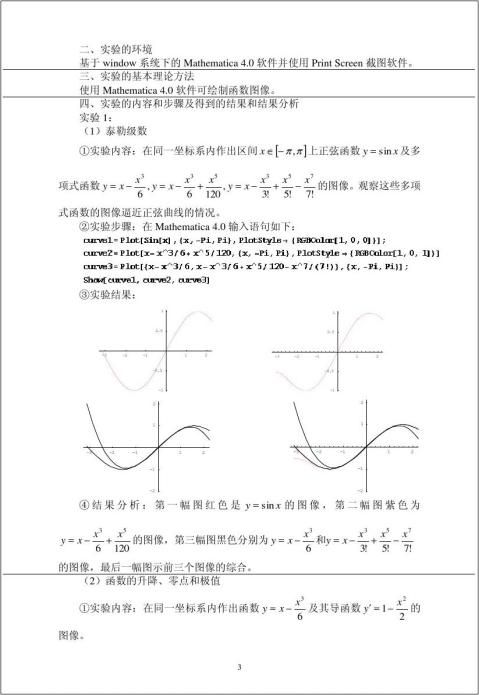
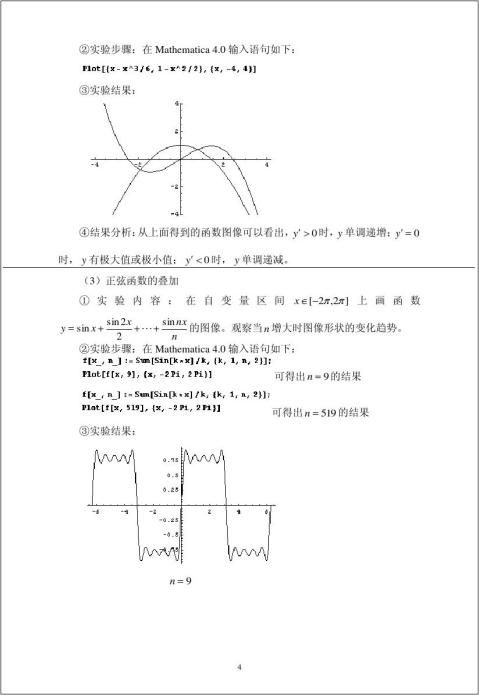
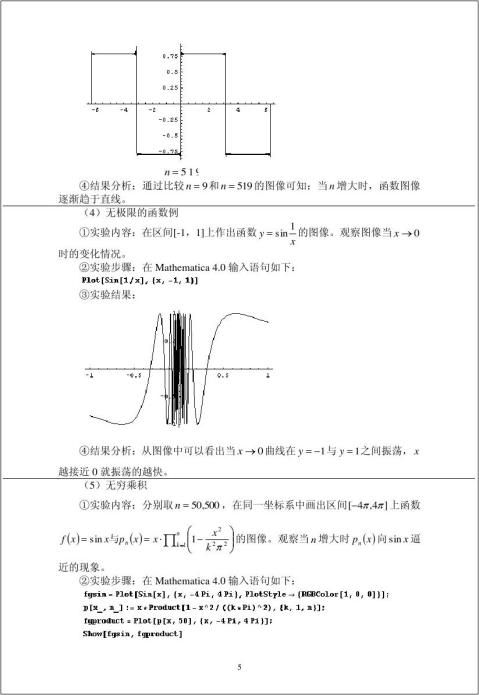
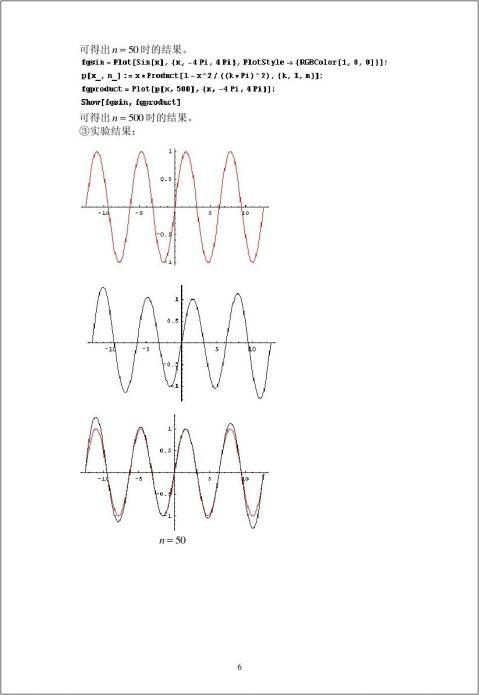
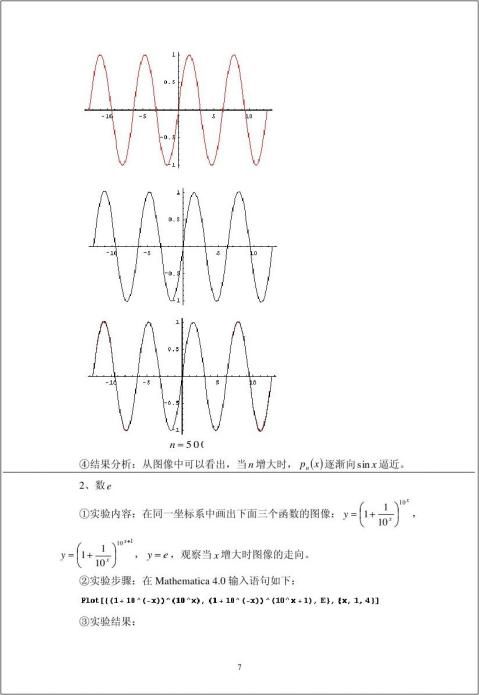
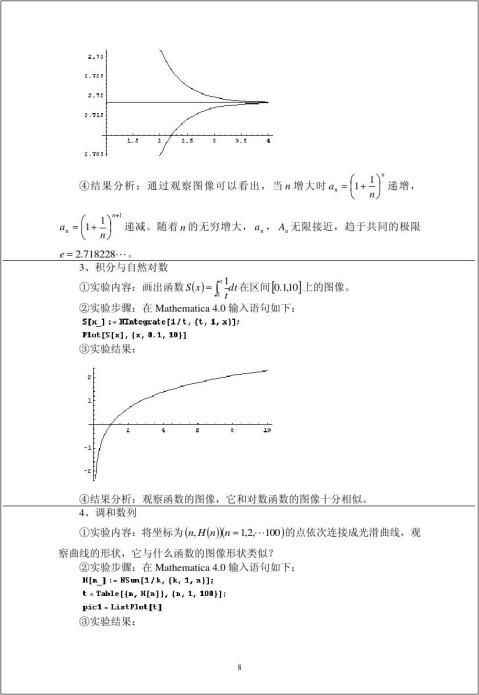
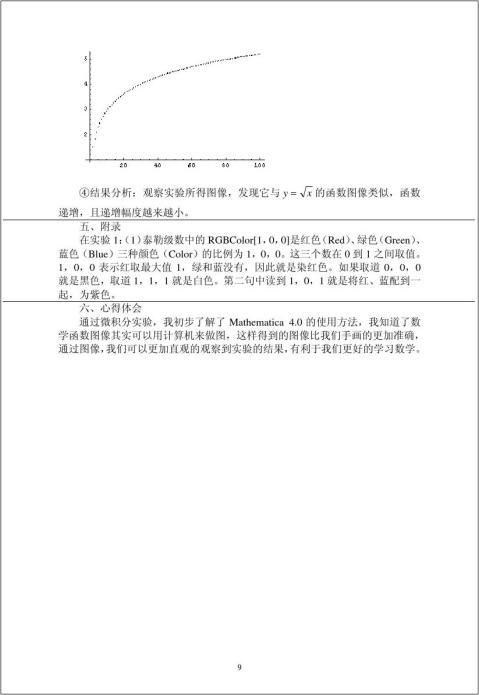
第二篇:实验一 微积分基础 mathmatic数学实验报告 王文翰实验1
数学与统计学院
班级:
姓名:王文翰
学号:数 学 实 验 实 验 报 告 2010级数学云亭班 201071010349
-
控制工程基础实验报告
控制工程基础实验报告姓名班级学号目录实验三131实验目的132实验内容133实验结果2实验四1541实验目的1542实验内容154…
-
机械控制工程基础实验报告
中北大学机械与动力工程学院实验报告专业名称实验课程名称实验项目数总学时班级学号姓名指导教师协助教师日期年月日实验二二阶系统阶跃响应…
- 机械控制工程基础实验报告
-
控制工程基础 实验报告
控制工程基础课程实验报告班级学号91211020xx25姓名南京理工大学20xx年1月1控制工程基础课程仿真实验一已知某单位负反馈…
-
清华大学精仪系--控制工程基础--实验内容与实验报告
实验内容一直流电机双环调速系统实验此时必须松开连轴节不带动工作台1测试电流环特性由于外接霍尔传感器只有一套有五套PWM放大器有电流…
-
《机械工程控制基础》Matlab仿真实验报告单(实验二) - 副本
红河学院工学院实验报告单机械工程控制基础Matlab仿真实验报告单课程名称机械工程控制基础实验姓名日期20xx126成绩年级专业2…
-
《机械工程控制基础》Matlab仿真实验报告单(实验三)
红河学院工学院实验报告单机械工程控制基础Matlab仿真实验报告单课程名称机械工程控制基础实验姓名锁鹏飞日期20xx1213成绩年…
- 机械控制工程基础实验报告
-
机械控制工程基础实验报告
中北大学机械与动力工程学院实验报告专业名称实验课程名称实验项目数总学时班级学号姓名指导教师协助教师日期年月日实验二二阶系统阶跃响应…
-
控制工程基础实验报告
控制工程基础实验报告姓名班级学号目录实验三131实验目的132实验内容133实验结果2实验四1541实验目的1542实验内容154…
-
控制工程师岗前实训总结报告(总)
控制工程师岗前实训总结报告班级:学号:22姓名:指导教师学期:20xx/20xx学年度第一学期承德石油高等专科学校计算机与信息工程…