交通灯控制设计实验报告
安徽科技学院
《数字电子技术课程设计》
设计
报
告
设计题目: 交通灯控制设计
班级:网络工程121姓名:丁俊杰学号:1887120107
成 绩: 评阅人:吕跃凤
安徽科技学院理学院
目录
一、设计要求
(一)设计指标
(二)设计要求
(三)制作要求
(四)编写设计报告
二、原理框图
三、单元电路设计
四、设计步骤及方法
五、总结
六、参考文献
交通灯控制的设计
交通灯控制电路是通过采用数字电路设计的,提出使交通灯控制电路用数字信号自动控制十字路口两组红、黄、绿交通灯的状态转换的新方法,指挥各种车辆和行人的安全通行,实现十字路口交通管理的自动化。
设计要求
(一)设计指标
1.为十字交叉路口设计两组信号灯控制,每组有红,绿,黄三色信号灯显示。各干信号灯顺序为:红à绿à黄à红à绿……,东西方向红灯亮的时间等于南北方向黄绿灯亮之和。
2.设置一组数码管,以倒计时的方式显示可以通过的或者禁止通行的时间。
3附加功能:当各条路上任意一条路上出现故障或有救护车,消防车等通过时,各方向都是红灯亮,倒计时停止,且显示数字在闪烁。当特殊情况结束后,控制其恢复正常。
(二)设计要求
1、画出电路原理图(或仿真电路图);
2、元器件及参数选择;
3、电路仿真与调试;
(三)制作要求
自行装配和调试,并能发现问题和解决问题。
(四)便携设计报告
写出设计与制作的全过程,附上有关资料和图纸,有心得体会
二、原理框图
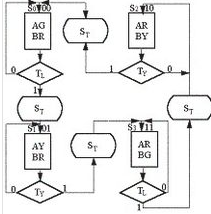
交通灯控制系统的原理框图如下图所示。它主要由控制器、定时器、译码器和秒脉冲信号发生器等部分组成。秒脉冲发生器是该系统中定时器和控制器的标准时钟信号源,译码器输出两组信号灯的控制信号,经驱动电路后驱动信号灯工作,控制器是系统的主要部分,由它控制定时器和译码器的工作。
交通灯控制系统的原理框图
图中:
TL: 表示甲车道或乙车道绿灯亮的时间间隔为25秒,即车辆正常通行的时间间隔。定时时间到,TL=1,否则,TL=0。
TY:表示黄灯亮的时间间隔为5秒。定时时间到,TY=1,否则,TY=0。
ST:表示定时器到了规定的时间后,由控制器发出状态转换信号。由它控制定时器开始下个工作状态的定时。
三、单元电路设计
(一)定时器
定时器由与系统秒脉冲(由时钟脉冲产生器提供)同步的计数器构成,要求计数器在状态信号ST作用下,首先清零,然后在时钟脉冲上升沿作用下,计数器从零开始进行增1计数,向控制器提供模5的定时信号TY和模25的定时信号TL。
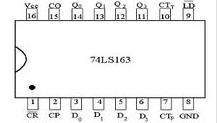
计数器选用集成电路74LS163进行设计较简便。74LS163是4位二进制同步计数器,它具有同步清零、同步置数的功能。74LS163的外引线排列图和时序波形图如图12、3所示,其功能表如表12、2所示。图中, 是低电平有效的同步清零输入端, 是低电平有效才同步并行置数控制端,CTp、CTT是计 图12.2 交通灯的ASM图数控制端,CO是进位输出端,D0~D3是并行数据输入端,Q0~Q 3是数据输出端。由两片74LS163级联组成的定时器电路如图12、4所示。电路的工作原理请自行分析。
图12、3 74LS163的外引线排列图和时序波形图

(二)控制器
控制器是交通管理的核心,它应该能够按照交通管理规则控制信号灯工作状态的转换。从ASM图可以列出控制器的状态转换表,如表12、3所示。选用两个D触发器FF1、FFO做为时序寄存器产生 4种状态,控制器状态转换的条件为TL和TY,当控制器处于Q1n+1Q0n+1= 00状态时,如果TL= 0,则控制器保持在00状态;如果,则控制器转换到Q1n+1Q0n+1= 01状态。这两种情况与条件TY无关,所以用无关项"X"表示。其余情况依次类推,同时表中还列出了状态转换信号ST。
图12、4 定时器电路图

表12.2 74LS163功能表
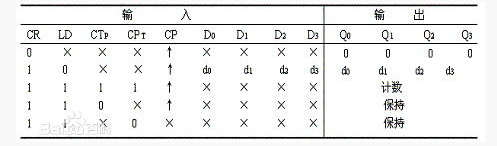
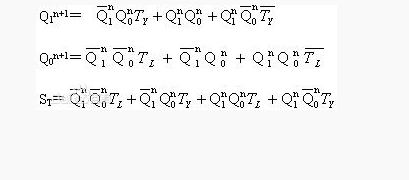
表12.3 控制器状态转换表

状态转换表根据表12.3、可以推出状态方程和转换信号方程,其方法是:将Q1n+1、Q0n+1和 ST为1的项所对应的输入或状态转换条件变量相与,其中"1"用原变量表示,"0"用反变量表示,然后将各与项相或,即可得到下面的方程:
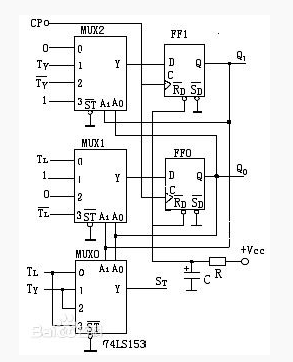
根据以上方程,选用数据选择器 74LS153来实现每个D触发器的输入函数,将触发器的现态值( )加到74LS153的数据选择输入端作为控制信号.即可实现控制器的功能。控制器的逻辑图如图12.5所示。图中R、C构成上电复位电路 。
图 12、5控制器逻辑图
(三)译码器
译码器的主要任务是将控制器的输出 Q1、 Q0的4种工作状态,翻译成甲、乙车道上6个信号灯的工作状态。控制器的状态编码与信号灯控制信号之间的关系如表 12、4所示。实现上述关系的译码电路请读者自行设计。
三、单元电路设计
1.1交通灯运行状态分析
交通灯控制电路,要求每个方向有三盏灯,分别为红、黄、绿,配以红、黄、绿三组
时间到计时显示。一个方向绿灯、黄灯亮时,另一个方向红灯亮。每盏灯顺序点亮,循
环往复,每个方向顺序为绿灯、黄灯、红灯。交通灯的运行状态共有四种,分别为:
状态
0
:东西方向车道的绿灯亮,车道,人行道通行;南北方向车道的红灯亮,车道,
人行道禁止通行。
状态1:东西方向车道的黄灯亮,车道,人行道缓行;南北方向车道的红灯亮,车道,
人行道禁止通行;
状态2:东西方向车道的红灯亮,车道,人行道禁止通行;南北方向车道的绿灯亮,车
道,人行道通行;
状态3:东西方向车道的红灯亮,车道,人行道禁止通行;南北方向车道的黄灯亮,车
道,人行道缓行;
4 种状态循环往复,并且红灯的倒计初始值为绿灯的倒计初始值和黄灯的倒计初始值
之和。交通灯电路的具体运行状态框图如图
1.1(人行道交通灯未标明)所示:
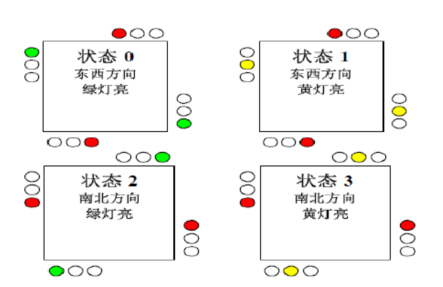
图1.1 交通灯运行状态分析图
1.2电路工作总体框图
交通灯控制电路主要由以下几部分构成,如图2.2 所示,有电源电路,脉冲电路,分
频电路,倒计时电路,(交通灯)状态控制电路,灯显示电路。
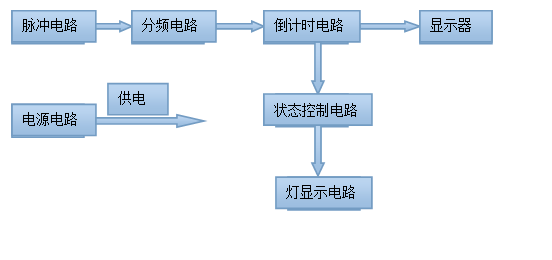
图1.2交通灯控制电路功能模块框图
2.1电源电路:
电源电路主要由整流、滤波、稳压三部分组成,用于供给数字电路的工作电源。整流部分由变压器与整流桥KBP210G 组成。220V、50Hz 的交流输入经过变压器之后,输出9V、50Hz
的交流电压。该电压输入整流桥,整流桥由四只整流二极管接成电桥的形式组成。整流桥输出8.1V 的直流电压。滤波电路用于滤去整流输出电压中的纹波,由1mF 的电容组成电容滤波电路。电容滤波电路简单,负载直流电压较高,纹波也较小,适合负载电压较高,负载变动不大的场合。稳压电路用于稳定电压的输出,由三端集成稳压器L7805 和电容组成。C2、
C3 用来实现频率补偿,防止稳压器产生高频自激振荡和抑制电路引入的高频干扰,C4 用于减少稳压电源输出端由输入电源引入的低频干扰。
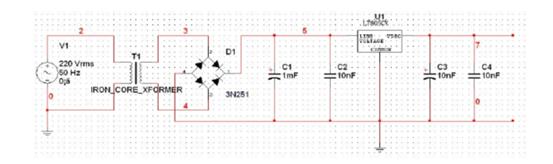 图2.1稳压电源
图2.1稳压电源
2.2脉冲电路:
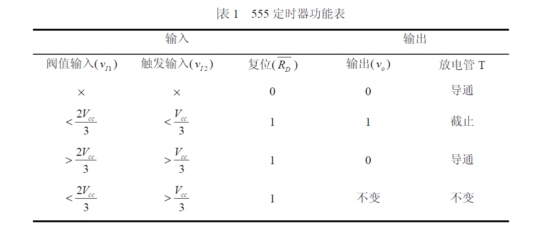
利用555 定时器为主组成多谐振荡器,输出4Hz 的矩型方波,实现脉冲电路功能。555 定时器的原理图如图3.2 所示,功能表如表1 所示:
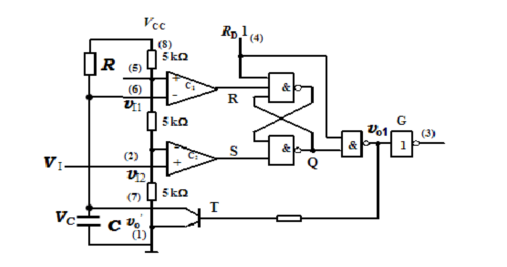
图2.2 555 定时器原理图
组成的脉冲电路如图2.3 所示:
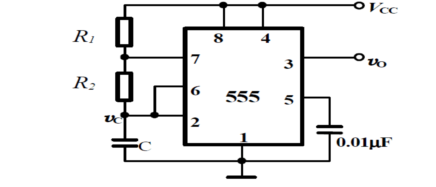
根据功能表和电路图计算如下式:
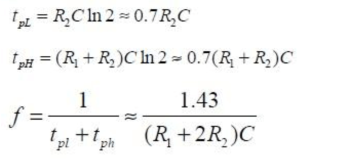
取R1=10kW,R2=10 kW,C=1.6uF。即可实现输出4Hz 的矩型方波。值得注意的是,在输出端接上了一个开关,可以控制系统工作的开始和暂停。
2.3 分频电路
分频电路利用计数器74LS193来实现,根据上面计算取4分频,即输出为2Q端,电路如图2.4 所示:
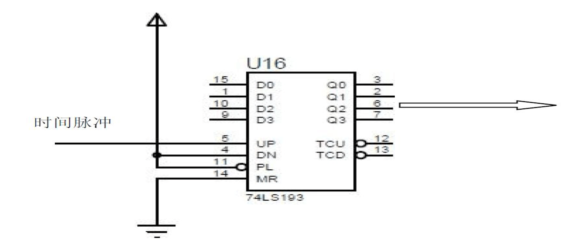
图2.4分频电路
2.4倒计时电路:十字路口要有数字显示,作为倒计时提示,以便人们更直观地把握时间。具体为:当某方向绿灯亮时,置显示器为某值,然后以每s 减1 的计数方式工作,直至减到数为5和0,十字路口绿、黄、红灯变换,一次工作循环结束,而进入下一步某方向的工作循环。根据题目的要求南北方向(主干道)车道和东西方向(支干道)车道两条交叉道路上的车辆交替运行,主干道每次通行时间都设为30s、支干道每次通行时间为20s。也就是一个循环是50s,如此先显示30s 后显示20s 倒计时,然后再显示30s 倒计时,以此类推。
设计时采用两块74LS193,一块是显示十位,一块是显示个位。个位接成十进制,从9 开始倒计时,当到达0 时,向高位发出一个借位信号,再继续从9 倒计时。一开始使十位数置数为3,二进制为0011,个位数为0,二进制为0000,此时个位产生一个借位信号给十位的脉冲输入端,十位的74LS193 芯片倒计时一次,结合个位的设置,电路从30 开始倒计时。当主车道绿灯亮了25s,倒计时也已经数到了5 了,此时,个位显示5,十位显示0,主车道的绿灯熄灭,主车道的黄灯开始倒计时闪亮5s,当倒计时到0 后,个位芯片74LS193 发出一个借位信号,向高位借数,但是高位已经是0 了,按照要求此时十位应该是从0 翻2,即二进制0010,为了实现这功能,通过研究十位的二进制数发现,十位的二进制是从0011、0010、0001 到0000 计数完,翻转为二进制0010,然后从0010、0001 到0000 倒计时,当到0000 后就结束一个循环,又从0011 开始新的一个循环。从二进制0011 和0010 两个不同的预置数,发现可以用1 个D 触发器74LS74 接成T 触发器并把Q 端接至十位倒计时的最低位来完成这个功能。高位产生借位信号时将Q 端的信号置入,当这个借位信号(低电平)消失后,产生一个上升沿的脉冲信号,使T触发器翻转然后保持,下一个借位信号来时就把此时的Q 值置入(此时Q 值为原来的非,即由0 变1 或由1 变0),然后翻转。通过以上置数方式可实现0011 和0010 的交替置入。另外,通过在特定时刻(倒计时高位由0000 变为0010 后)对T 触发器进行清零,可实现主次干道通行时间的调整。最后将电路的倒计时接到译码器74HC4511,再接到共阴极数码显示管上显示十进制数字。据此画出 倒计时电路如下图——图3.5 所示:
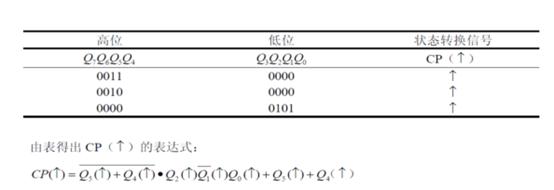
2.5状态控制电路 如图2.1,用倒计时控制灯的变化,先将图示状态0、1、2、3 编码为00、01、10、11,当倒计时为30、20、5 的时候产生一个信号给状态转换的电路,而这个信号是电平信号的话就很难实现,所以又用了边沿触发,此时用计数器表示状态,取其低两位的计数态00、01、10、11 为灯的状态,这样的话,来一个边沿信号就能使计数器加一,实现上述四状态转换。画出状态控制电路信号转换表如下表——表2 所示:
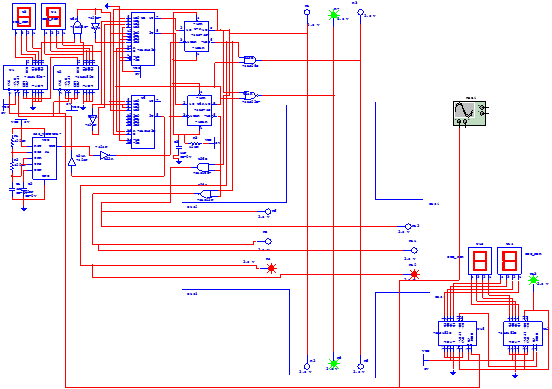
2.6 总体电路图:根据上面各功能电路的设计整合,用proteus 仿真软件画出总体电路图如2.7 所示:
四、元器件

五、总结
交通灯的设计心得体会总结
通过此次课程设计,使我更加扎实的掌握了有关电子线路方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。实践出真知,通过自己亲手实践,是我们掌握的知识不再是纸上谈兵。 过而能改,善莫大焉。在课程设计过程中,我们不断发现错误,不断改正,不断领悟,不断获取。最终的检测调试环节,本身就是在践行“过而能改,善莫大焉”的知行观。这次课程设计终于顺利完成了,在设计中遇到了很多问题,最后在老师的指导下,终于游逆而解。在今后社会的发展和学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功的做成想做的事,才能在今后的道路上劈荆斩棘,而不是知难而退,那样永远不可能收获成功,收获喜悦,也永远不可能得到社会极大人的认可。 课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时又是一门讲道课,一门辩思课,给了我许多道,给了我很多思,给了我莫大的空间。同时,设计让我感触很深。使我对抽象的理论有了具体的认识。通过这次课程设计,我掌握了NI Multisim软件的使用方法,了解了红绿灯的实际控制过程,以及如何提高电路的性能等等。 我认为,在这学期的实验中,不仅培养了独立思考、动手操作的能力,在各种其它能力上也都有了提高。更重要的是,我们学会了很多学习的方法。而这是日后最实用的,真的是受益匪浅。要面对社会的挑战,只有不断的学习、实践,再学习、再实践。这对于我们的将来也有很大的帮助。以后,不管有多苦,我想我们都能变苦为乐,找寻有趣的事情,发现其中珍贵的事情。就像中国提倡的艰苦奋斗一样,我们都可以在实验结束之后变的更加成熟,会面对需要面对的事情。 回顾起此课程设计,至今我仍感慨颇多,从理论到实践,在这段日子里,可以说得是苦多于甜,但是可以学到很多很多的东西,同时不仅可以巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计的过程中遇到问题,可以说得是困难重重,但可喜的是最终都得到了解决。
六、参考文献
1《数字电子技术基础》(伍时和 主编吴友宇凌玲副主编)
2、《数字电路逻辑设计》(脉冲与数字电路第三版)
王疏银 主编 高等教育出版社
3、《数字电路实验指导书》(西安邮电学院电子与信息工程系)
张亚婷 王利 杨乐 周丽娟 郭华编
第二篇:课程设计实验报告-交通灯控制功能设计
《微机原理与接口技术》
课程设计实验报告
题目:交通灯控制功能设计
指导老师:
专业:信息科学与工程学院
班级:自动化0807班
日期:20##-1-5
目录
一、设计思想和实施方案论述,硬件原理图及分析
1.1、课程设计名称
1.2、课程设计要求
1.3、课程设计目的
二、设计思想和实施方案论述,硬件原理图及分析
2.1、设计思想和实施方案
2.2、硬件原理图
三、典型模块以及典型编程技巧分析
3.1、8086典型模块分析
3.2、编程技巧分析
四、设计中遇到的问题及解决方法
五、程序清单和程序注释,相关流程图
5.1程序清单和注释
5.2、实验室及流程图
六、收获与体会
七、参考文献
一、 设计课程名称及要求
1.1、课程设计名称:交通灯控制功能设计。
1.2、课程设计要求:
(1)、分别用C语言和汇编语言编程完成硬件接口功能设计;
(2)、硬件电路基于80x86微机接口;
(3)、程序功能要求:小键盘给定、数码管(屏幕)显示;
(4)、同时具备急救车应急响应功能和时间倒计时显示功能。
1.3、课程设计目的:
《微机应用系统设计与综合实验(实践)》课程设计是自动化专业本科生必修的一门技术基础课。通过本课程设计,让学生对微机系统有一个较全面的理解,对典型数字接口电路的应用技术有一个较深入的掌握,并对应用系统进行硬件原理和软件编程进行分析、设计和调试,达到基本掌握简单微型计算机应用系统软硬件的设计方法,提高项目开发能力的目的。要求同学独立完成课题,写出课程设计说明书,画出电路原理图,说明工作原理,画出电路印制板图, 编写设计程序及程序流程图。
二、设计思想和实施方案论述,硬件原理图及分析
2.1、设计思想和实施方案:
本设计使用了两种方案,一种是采用8086和8255A可编程并行接口实现了交通灯的设计,分别对主干道和支干道显示红灯和绿灯并且计时,采用8254定时器/计数器产生1HZ的脉冲,来控制8259产生中断,从而实现整个电路的设计。交通灯采用红绿两种发光二极管,主干道亮45s,支干道亮30s,计数的最后5s中绿灯闪烁,用数码管倒计时显示时间,在发生紧急情况时,可以认为用开关控制主干道和支干道红灯均亮,禁止任何车通行。另一种方案是采用单片机来实现的,达到的效果和上述方案相同。单片机采用定时器T0和T1来触发中断,根据中断优先级的不同,从而可以处理不同的情况,交通灯也是采用红绿两种发光二极管,主干道亮45s,支干道亮30s,计数的最后5s中绿灯闪烁,用数码管倒计时显示时间,在发生紧急情况时,可以认为用开关控制主干道和支干道红灯均亮,禁止任何车通行,在故障清除后,断开开关可以使红绿灯和数码管回到原来的状态继续正常工作。
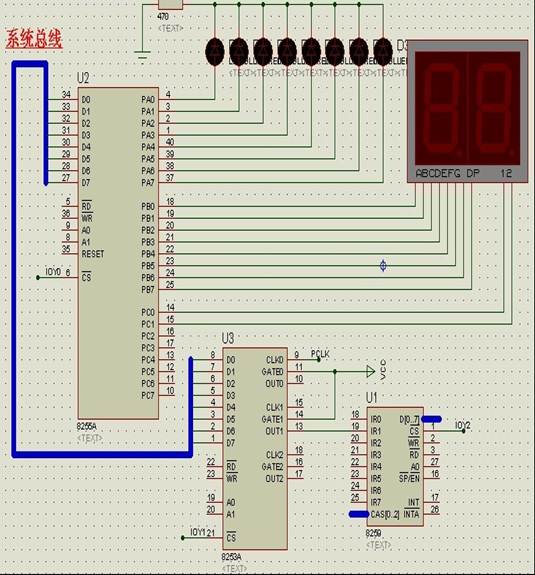
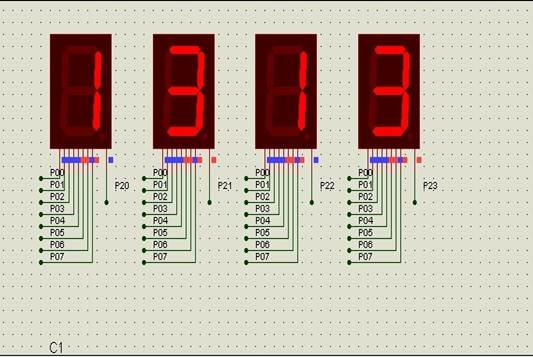
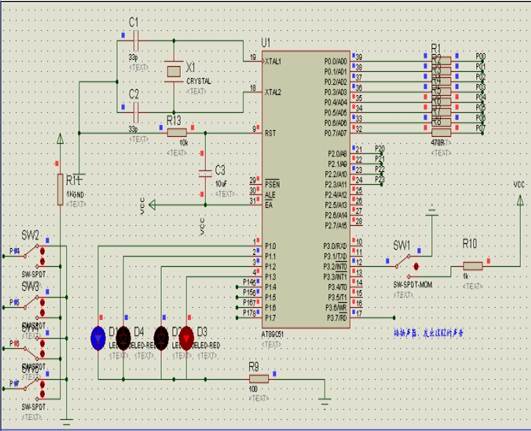
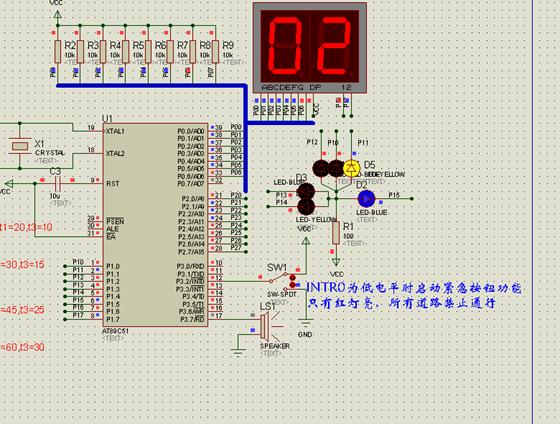
2.2、硬件原理图:
(a)图是基于8086的设计,(b)图是基于单片机的设计。在(a)图中,可编程并行接口芯片8255A用作输出口,控制红绿灯的亮暗和数码管的计时,定时器/计数器8254采用级联的方式产生1HZ的脉冲,并将此方波接到中断器8259的IR1上,即每秒钟让中断控制器产生依次中断,从而可以执行中断子程序。在(b)图中,P0口用于接数码管,P1口用于控制红绿灯的亮暗,P2口用于选通数码管,P32为定时器T0的控制端,当P32口为高电平时,定时器T0才会工作,并且T0的中断优先级高于T1,所以可以用于控制紧急情况。P37口接扬声器,在计数器T0工作时扬声器就会响。
三、典型模块以及典型编程技巧分析
3.1、8086典型模块分析:基于8086的设计主要由3个模块构成,其中8255是作为与外部显示电路的接口单元,8254和8259协同工作产生中断作为控制电路。可编程并行接口芯片8255A通过方式控制字设置成方式0工作模式,A、B、C口均为输出,可编程计数器/定时器8254通过控制字寄存器设置OU0和OU1均为方式3工作模式,通过级联产生1HZ的方波,中断控制器通过初始化命令字设置成边缘触发,8254的OU1口接到8259的IR1端,每秒钟就可以产生一次中断,每次执行中断子程序时使计数减1,从而可以实现倒计时功能,当计数到0时,重新给计数初值赋给,改变灯的状态。外部开关接8259的IR0端,它的中断优先级别高,设置成边缘触发,当按下开关,产生一个高电平的脉冲,就可以停止原来的状态来执行更高级别的中断子程序,这就可以处理紧急情况,让主干道和支干道都变成红灯。
单片机典型模块分析:基于单片机的设计主要是以51单片机为核心,通过变成开放T0和T1的中断,但T0要在INT0为高电平时计数器T0才会工作。计数器T1每50ms产生一次中断,每产生20次中断就令数码管的计数减1,当计数减到0时,重新设置数码管的计数初值,这样就可以依次循环工作了。当P32接高电平时,计数器T0开始工作,此时红灯都亮,扬声器发音,中断结束后还原原来的状态。
3.2、编程技巧分析:基于8086的设计编程语言是汇编语言,这里的几个编程模块就是方波产生模块,数码管显示模块和中断子程序模块。方波是通过8254级联产生的,设置8254的计时器0和计数器1工作在方式3,设置适当计数初值n即可,这个模块的程序如下所示:
LOOP2: MOV DX,MY8254_MODE
MOV AL,0
OUT DX,AL ;计数器0,读写16位低高字节,工作方式3,BCD计数
MOV AL,00H
MOV DX,MY8254_0
OUT DX,AL
MOV AL,50
OUT DX,AL
MOV DX,MY8254_MODE
MOV AL,77H
OUT DX,AL ;计数器1,读写16位低高字节,工作方式3,BCD计数
MOV AL,8
MOV DX,MY8254_1
OUT DX,AL
MOV AL,2
OUT DX,AL ;1.041667MHZ/2000/1000=1HZ,即计数器输出1HZ的方波
数码管的显示是通过调用显示函数实现的,通过设置8255的工作模式,选择数码管的高位工作,然后将计数的高位送到数码管,再选择数码管的低位工作,然后将计数的低位送到数码管,在1s钟内多次扫描就可以消除闪烁,从而达到理想的计数效果,它的程序如下所示:
disp PROC NEAR
C1:MOV DX,MY8255_C
MOV AL,0FEH;选通高位数码管
OUT DX,AL
SUB AH,AH
MOV AL,COUNT
MOV BL,0AH
DIV BL;商寄存在AL中,余数在AH中
MOV BX,OFFSET TAB
XLAT;通过查表找到对应的7段显示字符
MOV DX,MY8255_B
OUT DX,AL
CALL DELAY1ms
MOV AL,0
OUT DX,AL
MOV AL,0FDH;选通低位数码管
MOV DX,MY8255_C
OUT DX,AL
MOV AL,AH
MOV BX,OFFSET TAB
XLAT;通过查表找到对应的7段显示字符
MOV DX,MY8255_B
OUT DX,AL
CALL DELAY1ms
MOV AL,0
OUT DX,AL
MOV AH,1
INT 16H;有键按下则跳出
JNZ QUIT
disp ENDP
中断子程序模块是通过扩充中断源实现的,主要是通过设置8259的工作模式,开放TR1和TR0的中断,按上开关K后,TR0就发生中断,在TR0中断没有触发的情况下,从OU1口输出一个上升沿脉冲,TR1就中断一次,程序如下所示:
QUERY: MOV DX,MY8259_OCW3 ;向8259的OCW3发送查询命令
MOV AL,0CH
OUT DX,AL
IN AL,DX ;读出查询字
TEST AL,80H ;判断中断是否已响应
JZ QUERY ;没有响应则继续查询
AND AL,03H
CMP AL,00H
JE IR0ISR ;若为IR0请求,跳到IR0处理程序
JNE IR1ISR ;若为IR1请求,跳到IR1处理程序
JMP EOI
基于单片机的编程语言是C语言,它主要有数码管显示程序和中断服务子程序。数码管的显示和上面汇编语言的原理一样,它的程序如下:
void display(unsigned char t)//显示数码管函数
{
P2=0xf5;选通两个高位数码管
P0=tab[t/10];取t的十位送到P0口显示
delay();
P2=0xF0;开通所有的数码管,避免闪烁
P2=0xfa;选通低位两个数码管
P0=tab[t%10];取t的个位送到P0口显示
delay();
P2=0xF0;
}
中断服务子程序有计数器T0和计数器T1的子程序。T1的优先级低,它主要用于控制正常工作状态的红绿灯和数码管计数,而T0的优先级高,可以处理紧急情况,并且在处理紧急情况以后能返回原正常运行状态,这在汇编里面用的是栈保护,而在C语言中可以设置一个变量也存储原来的数据,可以达到同样保护数据的效果,这一点的实现代码如下:
void Time0(void) interrupt 1 using 0
{
t=0;
count1=count;//寄存中断前count的值,以便中断结束后恢复
while(t!=125)
{
t++;
sound=~sound;
P10=0;//紧急情况绿灯全熄
P12=0;
P11=1;//紧急情况红灯全亮
P13=1;
P2=0xF0;//点亮两个数码管
count=88;
display(count);
TH0=(65535-921)/256;
TL0=(65535-921)%256;
}
count=count1;//恢复原来count的值
if(a%2==0)
{P10=1;
P11=0;
P12=0;
P13=1;//返回主干道通行
}
else
{P10=0;
P11=1;
P12=1;
P13=0;//返回主干道通行
}
}
四、设计中遇到的问题及解决方法
1.数码管的计数每秒钟减1,当时不熟练8254的应用,就想用软件延时来实现这个功能,最后查资料的时候知道了计时器的级联应用,很容易的就解决了这个问题。
2.对于数码管的显示,最开始感觉很模糊,查阅资料的时候找到了XLAT表转换指令的应用,首先定义十进制的七段显示码,将表格首地址送入BX,数字的七段码在表格中的偏移量送入AL,然后执行XLAT就可以实现这个功能了。
3.对于要求中的紧急响应功能,开始时只想利用8254来实现,结果失败了,所以我就想到了用两级中断,产生高级中断时就开启紧急响应功能,触发蜂鸣器,点亮红灯。
4.在执行中断程序的过程中,寄存器中的变量好多都改变了,开始时束手无策,最后查资料时想到了栈的运用,利用入栈和出栈来保护寄存器中的初值。
5.在用C语言编程时,用PROTUES软件进行仿真时,数码管显示错误,一会显示一会停止,闪烁感太明显了。想想后,我就把显示函数从中断子程序中改放到主函数中,放在while(1)无限循环语句中,最后很好的解决了这个问题。查阅资料后才明白,执行中断子程序是很快的事,执行完了后就会返回到主函数中继续执行,所以显示函数放在中断子程序中只有在产生中断的时候才会工作,所以数码管很多时候就处于熄灭的状态,而显示函数放在主函数中就放好解决了这个问题。
6.要做到可以人为设置通行时间,在单片机中,我不熟练键盘扫描,所以就想到了另外一个办法,给P1的高四位赋不同的初值,这样可以得到16种组合,故可以设置16中初值,为了简化程序,我只设置了4种初值,不过同样可以达到设置初值的效果。
7.用单片机产生两级中断的时候,我不知道该选定时器中断还是外部中断,查资料后知道定时器0和定时器1的中断优先级不一样,定时器T0的优先级高,所以可以让定时器T1控制正常工作状态的灯显示和数码管计数,而定时器T0则控制突发情况。
五、程序清单和程序注释,相关流程图
5.1程序清单和注释:
基于8086汇编语言的程序清单及注释如下所示:
MY8255_A EQU IOY0+00H*4 ; 8255A口的地址
MY8255_B EQU IOY0+01H*4 ; 8255B口的地址
MY8255_C EQU IOY0+02H*4 ; 8255C口的地址
MY8255_MODE EQU IOY0+03H*4 ; 8255控制寄存器的地址
MY8254_0 EQU IOY1+00H*4 ; 8254计数器0端口的地址
MY8254_1 EQU IOY1+01H*4 ; 8254计数器0端口的地址
MY8254_MODE EQU IOY1+02H*4 ; 8254计数器0端口的地址
;***************根据CHECK配置信息修改下列符号值*******************
INTR_IVADD EQU 01CCH ;INTR对应的中断矢量地址
INTR_OCW1 EQU 0A1H ;INTR对应PC机内部8259的OCW1地址
INTR_OCW2 EQU 0A0H ;INTR对应PC机内部8259的OCW2地址
INTR_IM EQU 0F7H ;INTR对应的中断屏蔽字
PCI_INTCSR EQU 9438H ;PCI卡中断控制寄存器地址
IOY0 EQU 0C400H ;片选IOY0对应的端口始地址
IOY1 EQU 0C440H ;片选IOY0对应的端口始地址
IOY2 EQU 0C480H ;片选IOY0对应的端口始地址
;*****************************************************************
MY8259_ICW1 EQU IOY2+00H ;实验系统中8259的ICW1端口地址
MY8259_ICW2 EQU IOY2+04H ;实验系统中8259的ICW2端口地址
MY8259_ICW3 EQU IOY2+04H ;实验系统中8259的ICW3端口地址
MY8259_ICW4 EQU IOY2+04H ;实验系统中8259的ICW4端口地址
MY8259_OCW1 EQU IOY2+04H ;实验系统中8259的OCW1端口地址
MY8259_OCW2 EQU IOY2+00H ;实验系统中8259的OCW2端口地址
MY8259_OCW3 EQU IOY2+00H ;实验系统中8259的OCW3端口地址
RED EQU 0FAH ;紧急时刻,主支干道全部亮红灯
ZHU EQU 0F5H ;主干道灯的状态
ZHI EQU 0F9H ;支干道灯的状态
FLICKER EQU 0F0H ;控制灯闪烁
CLOSE EQU 00H ;关闭所有的灯
TIME1 EQU 20 ;主干道通行时间
TIME2 EQU 10 ;支干道通行时间
DATA SEGMENT
CS_BAK DW ?
IP_BAK DW ?
IM_BAK DW ?
TAB DB 40H,79H,24H,30H,19H,12H,02H,78H,00H,18H ;十进制数的七段显示码
COUNT DW ? ;存储计数的变量
FLAG DW ? ;flag为偶数时表明主干道通行
DATA ENDS
STACK1 SEGMENT STACK
DW 256 DUP(?)
STACK1 ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA,SS:STACK1
START: MOV AX,DATA
MOV DS,AX
CLI
MOV DX,MY8255_MODE
MOV AL,80H
OUT DX,AL ;初始化8255的工作模式A、B、C工作在方式0,均为输出
LOOP1: MOV DX,MY8255_A
MOV CX,3
A1: MOV AL,RED
OUT DX,AL
CALL DELAY1 ;延时0.5s
MOV AL,CLOSE
OUT DX,AL
CALL DELAY1
LOOP A1 ;初始状态主支干道红灯均闪烁,3s后进入正常工作状态
LOOP2: MOV DX,MY8254_MODE
MOV AL,0
OUT DX,AL ;计数器0,读写16位低高字节,工作方式3,BCD计数
MOV AL,00H
MOV DX,MY8254_0
OUT DX,AL
MOV AL,50
OUT DX,AL
MOV DX,MY8254_MODE
MOV AL,77H
OUT DX,AL ;计数器1,读写16位低高字节,工作方式3,BCD计数
MOV AL,8
MOV DX,MY8254_1
OUT DX,AL
MOV AL,2
OUT DX,AL ;1.041667MHZ/2000/1000=1HZ,即计数器输出1HZ的方波
MOV COUNT,TIME1
MOV FLAG,0 ;初始化主干道通行
MOV CL,ZHU
MOV AL,CL
MOV DX,MY8255_A
OUT DX,AL
MOV DX,PCI_INTCSR
SUB DX,19H
IN AL,DX
MOV DX,PCI_INTCSR ;初始化PCI卡中断控制寄存器
MOV AX,1F00H ;向PCI_INTCSR中写入003F1F00H
OUT DX,AX
ADD DX,2
MOV AX,003FH
OUT DX,AX
MOV AX,0000H ;替换INTR的中断矢量
MOV ES,AX
MOV DI,INTR_IVADD
MOV AX,ES:[DI]
MOV IP_BAK,AX ;保存INTR原中断处理程序入口偏移地址
MOV AX,OFFSET MYISR
MOV ES:[DI],AX ;设置当前中断处理程序入口偏移地址
ADD DI,2
MOV AX,ES:[DI]
MOV CS_BAK,AX ;保存INTR原中断处理程序入口段地址
MOV AX,SEG MYISR
MOV ES:[DI],AX ;设置当前中断处理程序入口段地址
MOV DX,INTR_OCW1 ;设置中断屏蔽寄存器,打开INTR的屏蔽位
IN AL,DX
XOR AX,AX
MOV IM_BAK, AX ;保存INTR原中断屏蔽字
AND AL,INTR_IM
OUT DX,AL
MOV DX,MY8259_ICW1 ;初始化实验系统中8259的ICW1
MOV AL,13H ;边沿触发、单片8259、需要ICW4
OUT DX,AL
MOV DX,MY8259_ICW2 ;初始化实验系统中8259的ICW2
MOV AL,08H
OUT DX,AL
MOV DX,MY8259_ICW4 ;初始化实验系统中8259的ICW4
MOV AL,01H ;非自动结束EOI
OUT DX,AL
MOV DX,MY8259_OCW1 ;初始化实验系统中8259的OCW1
MOV AL,0FCH ;打开IR0和IR1的屏蔽位
OUT DX,AL
STI
WAIT1: CALL DISP ;数码管显示
MOV AH,1 ;判断是否有按键按下
INT 16H
JZ WAIT1 ;无按键则跳回继续等待,有则退出
QUIT: CLI
MOV DX,PCI_INTCSR ;恢复PCI卡中断控制寄存器
MOV AX,0000H
OUT DX,AX
MOV AX,0000H ;恢复INTR原中断矢量
MOV ES,AX
MOV DI,INTR_IVADD
MOV AX,IP_BAK ;恢复INTR原中断处理程序入口偏移地址
MOV ES:[DI],AX
ADD DI,2
MOV AX,CS_BAK ;恢复INTR原中断处理程序入口段地址
MOV ES:[DI],AX
MOV DX,INTR_OCW1
XOR AX,AX
;恢复INTR原中断屏蔽寄存器的屏蔽字
MOV AX,IM_BAK
OUT DX,AL
STI
MOV AX,4C00H ;返回到DOS
INT 21H
MYISR PROC NEAR ;中断处理程序MYISR
QUERY: MOV DX,MY8259_OCW3 ;向8259的OCW3发送查询命令
MOV AL,0CH
OUT DX,AL
IN AL,DX ;读出查询字
TEST AL,80H ;判断中断是否已响应
JZ QUERY ;没有响应则继续查询
AND AL,03H
CMP AL,00H
JE IRO0 ;若为IR0请求,跳到IR0处理程序
JNE IRO1 ;若为IR1请求,跳到IR1处理程序
JMP EOI
IRO0: MOV AL,FLAG ;IRO为高级中断,处理紧急情况
CBW
MOV BX,AX ;把count变成双字节存入AX,这样就可以存入栈中
MOV AL,COUNT ;把count变成双字节存入AX,这样就可以存入栈中
CBW
PUSH AX
PUSH BX
MOV CX,0FFFFH ;中断程序执行时间为65536*256/f=3s
LOOP0: MOV BL,0FFH
LOOP1: MOV DX,MY8255_A
MOV AX,0FAH ;主干道支干道红灯均亮
MOV DX,MY8255_C
MOV AL,80H ;PC7为高电平,接扬声器
OUT DX,AL
DEC BL
CMP BL,0
JNE LOOP1
LOOP LOOP0
POP BX
POP AX
MOV COUNT,AL ;还原中断前的变量值
MOV FLAG,BL
MOV AH,0
MOV AL,FLAG
MOV BL,2
DIV BL ;AH=1,FLAG为奇数 ,支干道通行
CMP AH,1
JE P3
MOV DX,MY8255_A
MOV AL,ZHU ;主干道通行灯的状态
OUT DX,AL
P3: MOV DX,MY8255_A
MOV AL,ZHI ;支干道通行灯的状态
OUT DX,AL
IRET
IRO1: MOV AL,COUNT
SUB AL,01H
DAS
MOV COUNT,AL ;计数初值自减1
CMP AL,0
JE L2
MOV AL,FLAG
MOV BL,2
DIV BL ;AH=1,FLAG为奇数 ,支干道通行
CMP AH,1
JE P1
MOV DX,MY8255_A
MOV AL,ZHU ;主干道通行灯的状态
OUT DX,AL
P1: MOV DX,MY8255_A
MOV AL,ZHI ;支干道通行灯的状态
OUT DX,AL
L2: MOV AL,FLAG
ADD AL,01H ;状态显示数加1
DAA
MOV AH,0
MOV BL,2
DIV BL ;AH=1,FLAG为奇数 ,支干道通行
CMP AH,1
JE P2
MOV COUNT,TIME1 ;支干道工作完后设置主干道的通行时间TIME1
P2: MOV COUNT,TIME2 ;主干道工作完后设置支干道的通行时间TIME2
IRET
EOI: MOV DX,MY8259_OCW2 ;向实验系统中8259发送中断结束命令
MOV AL,20H
OUT DX,AL
OVER: MOV DX,PCI_INTCSR
SUB DX,19H
IN AL,DX
MOV DX,PCI_INTCSR ;清PCI卡中断控制寄存器标志位
ADD DX,2
MOV AX,003FH
OUT DX,AX
MOV DX,INTR_OCW2 ;向PC机内部8259发送中断结束命令
MOV AL,20H
OUT DX,AL
MOV AL,20H
OUT 20H,AL
IRET
MYISR ENDP
DISP PROC
MOV DX,MY8255_C
MOV AL,0AH ;选通高位数码管
OUT DX,AL
MOV AL,COUNT
MOV BL,0AH
DIV BL ;十位存在AL中,个位存在AH中
MOV BX,OFFSET TAB
XLAT ;找到十位对应的七段显示码
MOV DX,MY8255_B
OUT DX,AL
CALL DELAY1MS
MOV DX,MY8255_C
MOV AL,05H
OUT DX,AL
MOV AL,AH
MOV BX,OFFSET TAB
XLAT ;找到个位对应的七段显示码
MOV DX,MY8255_B
OUT DX,AL
RET ;过程返回指令
DISP ENDP
DELAY1 PROC NEAR ;延时0.5s
PUSH AX
PUSH CX
MOV AX,05FFFH
D1: MOV CX,64FFH
D2: LOOP D2
DEC AX
JNZ D1
POP CX
POP AX
RET
DELAY1 ENDP
DELAY1MS PROC NEAR ;延时1ms
PUSH CX
MOV CX,50H
NEXT: NOP
NOP
LOOP NEXT
POP CX
RET
DELAY1MS ENDP
CODE ENDS
END START
基于单片机的C语言程序清单及注释如下所示:
#include <reg52.h>
unsigned char tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
unsigned char time;
unsigned char t;
unsigned char count;//储存通行时间
unsigned char main1;//主干道通行时间
unsigned char cross;//支干道通行时间
unsigned char count1;
unsigned char a;//测试主干道工作还是支干道工作
sbit P10=P1^0;//控制主干道绿灯
sbit P11=P1^1;//主干道红灯
sbit P12=P1^2;//控制支干道绿灯
sbit P13=P1^3;//支干道红灯
sbit P14=P1^4;//以下端口辅助拨码开关设置时间
sbit P15=P1^5;
sbit P16=P1^6;
sbit P17=P1^7;
sbit sound=P3^7;//发声音
void delay()//延时20ms
{ unsigned char i;
for(i=0;i<200;i++)
;
}
void display(unsigned char t)//显示数码管函数
{
P2=0xf5;
P0=tab[t/10];
delay();
P2=0xF0;
P2=0xfa;
P0=tab[t%10];
delay();
P2=0xF0;
}
void main()
{
EA=1; //开总中断
ET0=1; //开定时器0的中断
ET1=1; //开定时器1的中断
TMOD=0X19;//计数器1工作于方式1,计数器0工作于方式1,TR0为1且INT0为高电平启动工作
TH0=(65535-921)/256;
TL0=(65535-921)%256; //定时器0赋初值
TH1=(65535-46083)/256; //定时50ms
TL1=(65535-46083)/256;
TR0=1;
TR1=1;
P10=1;
P11=0;
P12=0;
P13=1;//初始化主干道通行
a=0;//初始化主干道工作
time=0;
count=30;//初始化主干道时间
while(1)
{
display(count);
if(P14==1&&P15==0&&P16==0&&P17==0)
{main1=20;cross=10;}
else if(P14==0&&P15==1&&P16==0&&P17==0)
{main1=30;cross=15;}
else if(P14==0&&P15==0&&P16==1&&P17==0)
{main1=40;cross=25;}
else if(P14==0&&P15==0&&P16==0&&P17==1)
{main1=50;cross=35;}
else
{main1=60;cross=45;}
/*通过拨码开关设置主支干道的通行时间,相当于键盘扫描的效果*/
}
}
void Time1(void) interrupt 3 using 0//定时器T1,较低级中断
{
time++;
if(time==20) //50*20=1000ms=1s,计数1s后count减1
{ count--;
if(count<5&&count>0) //最后5s设置绿灯闪烁
{ if(a%2==0)
P10=~P10;//主干道绿灯闪烁
else P12=~P12;//支干道绿灯闪烁
}
else if(count==0)
{ a++;
P10=~P10;//主干道工作完后灯取反
P11=~P11;
P12=~P12;
P13=~P13;
if(a%2==0)
count=main1; //主干道时间
else
count=cross; //支干道时间
}
time=0;
}
TH1=(65535-46083)/256; //重新给定时器1赋初值
TL1=(65535-46083)/256;
}
/*INT0为高电平时出发定时器0计数,高级中断 */
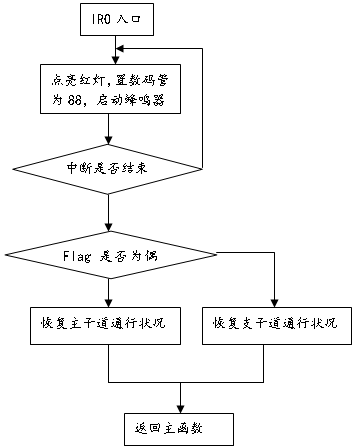
void Time0(void) interrupt 1 using 0
{
t=0;
count1=count;//寄存中断前count的值,以便中断结束后恢复
while(t!=125)
{
t++;
sound=~sound; //产生方波,触发蜂鸣器响
P10=0;//紧急情况绿灯全熄
P12=0;
P11=1;//紧急情况红灯全亮
P13=1;
P2=0xF0;//点亮两个数码管
count=88;
display(count);
TH0=(65535-921)/256;
TL0=(65535-921)%256;
}
count=count1;//恢复原来count的值
if(a%2==0)
{P10=1;
P11=0;
P12=0;
P13=1;//返回主干道通行
}
else
{P10=0;
P11=1;
P12=1;
P13=0;//返回主干道通行
}
}
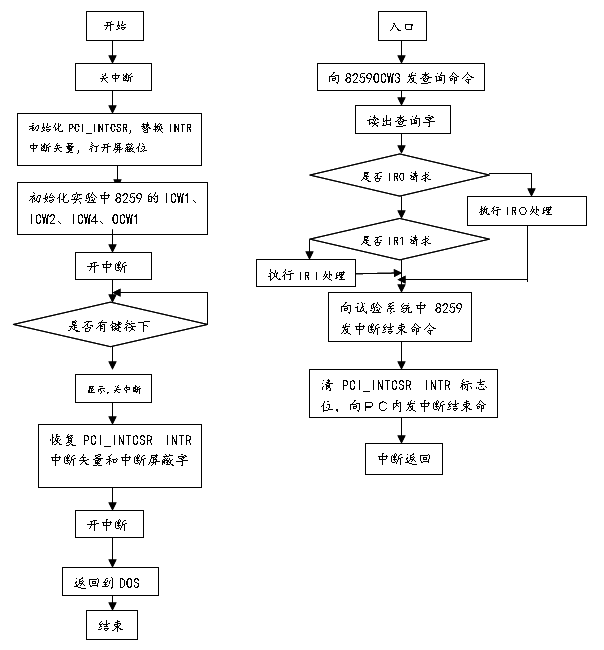
5.2、实验室及流程图:
两种设计方案的思想完全一致,故它们的流程图基本相同,可以用下面的图来表示:
是
 否
否
否
是
否 否
是
IR1的流程图: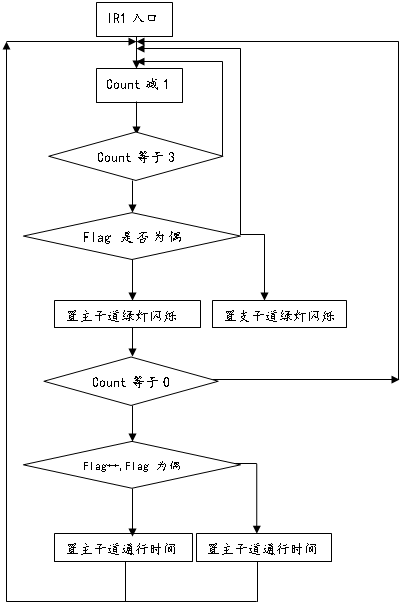
否
是
否
是
否
是 否
 IR0流程图:
IR0流程图:
否
是
是
是 否
按照流程图和相关的模块,就可以设计程序了。汇编语言和单片机C语言达到一样的效果,流程图代表了整个设计的核心思想,所以它们的流程图思想是一样的。主题思想就是定时器计数,计数满后就产生中断,中断子程序改变数码管的显示值,数码管显示0后就在下一次中断时改变灯的状态,另外重新给数码管一个新的计数初值,另外一个高级中断就处理异常事故,它的中断子程序要改变灯的状态,改变数码管的显示值,触发蜂鸣器响,中断执行完后就要恢复原来的状态,按照这样的工作方式不断的进行,就是一个完整的交通灯控制系统了。
六、收获与体会
这次课程设计,总体来说让我增加了很多知识,动手实践比上课有意思多了,但在设计的过程中我发现理论知识也同样重要,各种寻址方式以及8086的指令系统,还有各种寄存器的应用,掌握了这些基本知识,汇编就变得轻松多了。这次课程设计,我学会了8255和8254的应用,初步了解了8259中断的应用,把理论知识和实践相结合,从而提高了自己的同手能力和独立思考的能力。在听课的过程中,我对微机的工作原理不是很清楚,对计数器和外围接口芯片的用法也不熟悉,更不清楚中断的用法了,通过这次课程设计,我知道了状态控制字来工作这些芯片的工作模式,同时,我了解了中断的过程,产生中断时,系统会转去执行中断服务子程序,执行完子程序后又会返回到主函数中继续执行程序。
虽然我的收获很多,但在这次的课程设计中,我还有很多地方做的不好,我对中断子程序的调用还没有完全掌握,还不会使用键盘接口的编程,我也不会用C语言编程控制8086工作,所以我选择用单片机做这个设计以实现相同的功能。单片机与8086相比,它把中断器,输入输出设备,定时器/计数器都集成在一起,所以在设计小的系统上面显得容易很多。单片机的输入输出口很多,有P0,P1,P2,P3共32个端口,扩展系统也比较容易,它内部的定时器/计数器也简化了外部电路的设计。单片机的中断功能没有8086强大,但我设计的交通的控制系统只需要用到两个中断,并且是两个计数器中断,它们之间也有中断的优先级,所以正好用于控制不同的功能。我以前也学过一些单片机,但这次是我第一次完成靠自己思考完成的,确实感到很高兴。在这次设计中,我先设计一个最简单的交通灯系统,然后不断的扩展功能,先用软件仿真,然后在设计,这样的流程感觉很顺利。
在用单片机设计的过程中,我也有了很大的收获。对于定时器/计数器的应用,中断的应用以及中断优先级的运用,我慢慢尝试着运用,也就有点熟练了。多动手设计就会更快的掌握知识,实践就是最好的老师。
在以后的时间里,我一定会再接再厉,争取更大的进步!
七、参考文献
1、微型计算机原理与接口技术.周荷琴,吴秀清。中国科学技术大学出版社
2、单片机C语言应用100例.王东峰,王会良。电子工业出版社
3、32位微机原理与实验教程
/**********此交通灯实现的功能更多一些*********************/
/////**************************现代交通灯的设计***************************///////
#include<reg51.h>
/*位定义P1口,控制灯和数码管 */
sbit P10=P1^0;
sbit P11=P1^1;
sbit P12=P1^2;
sbit P13=P1^3;
sbit P14=P1^4;
sbit P15=P1^5;
sbit P16=P1^6;
sbit P17=P1^7;
sbit P20=P2^0;
sbit P21=P2^1;
sbit P22=P2^2;
sbit P23=P2^3;
sbit P37=P3^7;//控制扬声器发音
/**************************共阳数码管显示0~9的段码表*****************************/
unsigned char code number[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
/*********************************************************************************/
unsigned char t1;//直道绿灯亮的时间
unsigned char t2;//直道黄灯亮的时间
unsigned char t3;//左转道绿灯亮的时间
unsigned char t4;//左转道黄灯亮的时间
unsigned char t5;//红灯亮的时间
unsigned char t10,t20,t30,t40,t50;
unsigned char count;//存储中断次数的变量
unsigned char flag;//判断通行情况
unsigned char f;//调节高频波形和低频波形的依次出现 ,便于产生救护车声音
unsigned int h;//高频波形
unsigned int l;//低频波形
unsigned char t;//调节高频波形和低频波形出现的时间
/**************************
延时函数:延时30ms
**************************/
void delay(void)
{
unsigned char i,j;
for(i=0;i<100;i++)
for(j=0;j<100;j++)
;
}
/**************************
显示函数:显示数码管
**************************/
void display(unsigned char x)
{
P16=1;P17=0;
P0=number[x/10];//显示十位
delay();
P16=0;P17=1;
P0=number[x%10];//显示个位
delay();
P16=0;P17=0;
}
/**************************
主函数
**************************/
main()
{
EA=1;
ET1=1;//启动定时器T1的中断
EX0=1;//启动外部中断INTR0
TMOD=0x10;
TH1=(65535-46083)/256;
TL1=(65535-46083)%256;//50ms中断一次
t10=30;
t20=4;
t30=16;
t40=4;
t1=t10; //初始化通行时间
P1=0x1e;//初始化灯的状态
count=0;
flag=1;//初始化直道通行
f=0;
l=0;
h=0;
t=0;
TR1=1;//开定时器T1的中断
IT0=0;//INTR0为低电平触发外部中断INTR0
while(1)
{
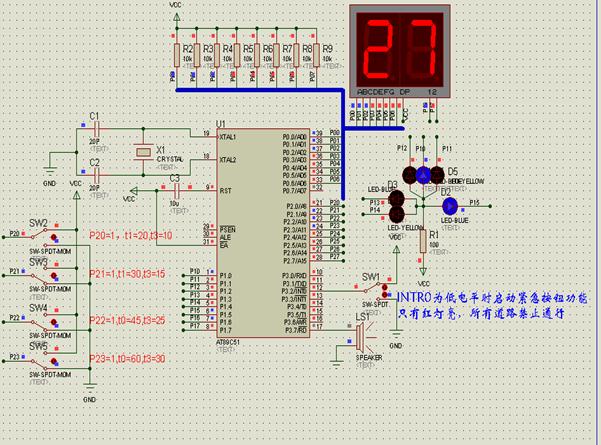
if(P23==0&&P22==0&&P21==0&&P20==1)
{ t10=20;t30=11;}
if(P23==0&&P22==0&&P21==1&&P20==0)
{ t10=30;t30=16;}
if(P23==0&&P22==1&&P21==0&&P20==0)
{ t10=45;t30=26;}
if(P23==1&&P22==0&&P21==0&&P20==0)
{ t10=60;t30=31;}
switch(flag)
{ case 1:display(t1);P1=0x1e;break;
case 2:display(t2);P1=0x1d;break;
case 3:display(t3);P1=0x17;break;
case 4:display(t4);P1=0x0f;break;
case 5:display(t5);P1=0x1b;break;
default:break;
}
}
}
/*************************************************
定时器T1的中断子程序 :改变数码管和灯的状态
*************************************************/
void Time1(void)interrupt 3 using 0
{
count++;
if(count==20)//1s中执行下列程序一次
{ count=0;
if(flag==1)
{ t1--;
if(t1==0)
{ flag=2;
t1=t10;
t2=t20;
t3=t30;
t4=t40;
t5=t10+t20+t30+t40-2;
}
}
if(flag==2)
{ t2--;
if(t2==0)
{ flag=3;
t1=t10;
t2=t20;
t3=t30;
t4=t40;
t5=t10+t20+t30+t40-2;
} //切换到左转道工作
}
if(flag==3)
{ t3--;
if(t3==0)
{ flag=4;
t1=t10;
t2=t20;
t3=t30;
t4=t40;
t5=t10+t20+t30+t40-2;
}
}
if(flag==4)
{ t4--;
if(t4==0)
{ flag=5;
t1=t10;
t2=t20;
t3=t30;
t4=t40;
t5=t10+t20+t30+t40-2;
}//切换到红灯状态
}
if(flag==5)
{ t5--;
if(t5==0)
{ flag=1;
t1=t10;
t2=t20;
t3=t30;
t4=t40;
t5=t10+t20+t30+t40-2;
}//切换到直道通行状态
}
}
TH1=(65535-46083)/256;
TL1=(65535-46083)%256;//重新设置定时器T1的初值
}
/**************************************************
外部中断INTR0的中断子程序 :只有红灯亮,禁止通行
**************************************************/
void int0(void)interrupt 0 using 0
{
P1=0x3b;//只有红灯亮
display(88);
if(f==0)
{ h++;
if(h%5==0)
P37=~P37;//fh=2KHZ
if(h==10000)
{ t++;
if(t==10)
{ f=1;
t=0;
}
}
}
else if(f==1)
{ l++;
if(l%500==0)
P37=~P37;//fl=2HZ
if(l==10000)
{ t++;
if(t==10)
{
f=0;
t=0;
}
}
}
}
-
单片机交通灯实验报告
交通灯控制系统设计院系:电子电气工程学院专业:电气自动化班级:P10电气四班成员:*************交通灯控制系统设计实验…
- PLC实验报告——交通灯控制
-
交通灯控制电路实验设计报告
单片机原理及应用课程设计报告书题目姓学号093621001093621018093621058专业电子信息科学与技术设计时间20x…
-
PCL实验报告——十字路口交通灯控制
哈尔滨德强商务学院实验报告课程名称可编程控制器原理与应用系别计算机与信息工程系专业工业工程班级092学号20xx51059129学…
-
交通灯控制设计实验报告
安徽科技学院数字电子技术课程设计设计报告设计题目交通灯控制设计班级网络工程121姓名丁俊杰学号成绩评阅人吕跃凤安徽科技学院理学院目…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气自动化姓名刘成指导教师刘德化华中科技大学评分华中科技大学毕业设…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气0903姓名熊小鹏指导教师刘晶华中科技大学武昌分校评分华中科技…
-
基于PLC的十字路口交通灯控制系统设计开题报告
毕业设计论文开题报告课题名称基于PLC的十字路口交通灯类别专业班电气0903姓名熊小鹏指导教师刘晶华中科技大学武昌分校评分华中科技…
-
基于单片机的交通灯控制系统设计开题报告
泰山学院毕业论文设计开题报告题目基于单片机的交通灯控制系统设计学院机械与工程学院年级二零一一32专业机械设计制造及其自动化姓名学号…
-
交通灯控制电路设计报告
华北科技学院数字电路设计报告交通灯控制电路设计报告目录一设计任务和要求2二设计方案的总体思路与选择31时钟信号发生器电路设计论证4…
-
单片机交通灯课程设计报告(含电路图,源程序)
摘要31引言42总体设计方案521设计思路5211设计目的5212设计任务和内容6213方案比较设计与论证6214芯片简介922设…