PID仿真实验报告
自动控制系统结构特性及PID参数整定实验
一、实验目的
1、了解FESTO过程控制系统的组成、结构和功能;
2、掌握PID控制器的基本原理;
3、掌握试凑法对系统PID参数进行整定。
二、实验设备
实验设备采用由德国FESTO生产组装的流体控制系统。该系统由液位站、流量站、压力站、温度站和旁通站五个站点构成,其中前四个站可以独立进行水的液位、流量、压力、温度四个物理量测试和控制实验。四个站的水路通过旁通站相连,并通过旁通站与计算机主机进行控制数据的通信。
同时在计算机端使用FESTO检控软件对控制过程进行监控。通过该软件还可以对各个数字控制系统的比例积分微分系数以及设定值、输出值进行设定。并可以曲线形式显示传感器的返回信号。
三、实验内容
1、通过计算机监控软件,按照指导书上设定的参数对压力站进行设定,并观察系统阶跃响应曲线的变化,并记录。
2、对压力站进行PID参数的整定使得其系统的阶跃响应最优。(自立调节目标)
四、实验结果
1、总结实验中液位、流量、压力、温度控制系统的共同特点。
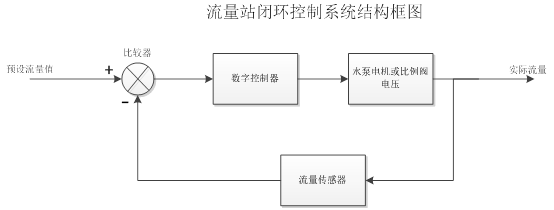
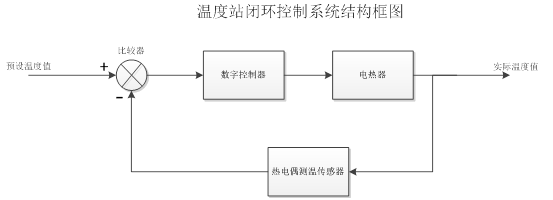
答:(1)四个站点均为对流体的一项物理状态进行检测,并通过检测量与对应物理量预设值的比较结果控制相应的执行环节使得被控制量达到预设值。
(2)四个站点均采用闭环负反馈的控制方法实现了自动控制。
(3)四个站点均具有传感器,数字控制器、电动机、泵等主要元件。
2、分别写出液位、流量、压力、温度站的闭环控制系统结构框图。
根据实验指导书上所述原理,画出四个站点的闭环控制系统结构框图如下:


3、实验数据表格记录
Ⅰ、FESTO监控软件操作练习,对压力站完成以下实验:
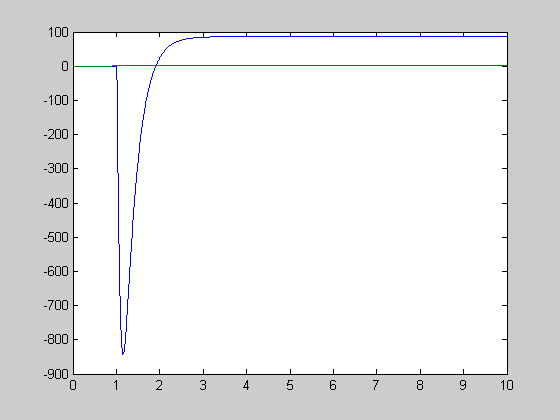
1)设定(Kp=1,Tr=0.5,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

由图线可以看出系统的响应为衰减震荡。调节时间较长。
2)设定(Kp=5,Tr=0.5,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

由图线可以看出系统发生等幅振荡。
3)设定(Kp=1,Tr=1,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。
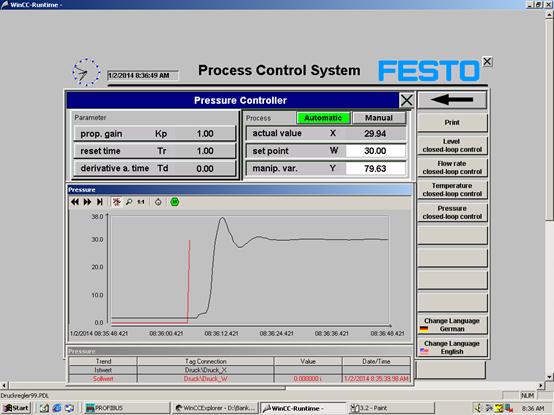
可以看到增大Tr之后,系统的震荡次数大大减少。
4)设定(Kp=0.5,Tr=1,Td=0)设定值W=30,观察系统阶跃响应曲线的变化。

通过图线可以直观的看到系统的超调量进一步减小,但是系统的调节时间变的更长了。
总体来看,增大Kp的值可以使的系统快速逼近设定值,提高了系统的快速性,但是会带来超调以及稳态误差等问题。减小积分环节系数Tr可以看到,系统能够较快的达到预设值,并减小震荡次数。
Ⅱ、选择压力站,调整PID控制的参数,使得系统的阶跃响应最好。
(1)、设定(Kp=0.5,Tr=1,Td=0)设定值W=30,用配凑法对PID进行整定如下:
(由于在前面的压力站测试中,第四组的结果最为理想,我们直接在第四组数据的基础上进行调试,寻找最佳的系数组合。)

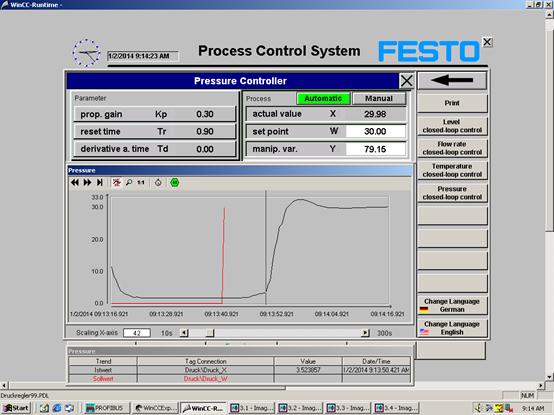
 由于参考值的超调量较大,故将Kp减至0.3,具体阶跃响应如上图所示。经过测量发现,系统的超调量依旧不理想。故打算继续减小Kp值。
由于参考值的超调量较大,故将Kp减至0.3,具体阶跃响应如上图所示。经过测量发现,系统的超调量依旧不理想。故打算继续减小Kp值。

在不断减小Kp和Tr以期望得到较小超调量的过程中,发现响应速度也随之减小,不符合实验预期。因此,为达到超调量较小、响应速度快、稳态误差小的目的,依据Kp,Tr,Td的调节规则进行不断调试。

最终调至Kp=0.35,Tr=1.10,Td=0.10后,得到的曲线基本符合要求,如上图。
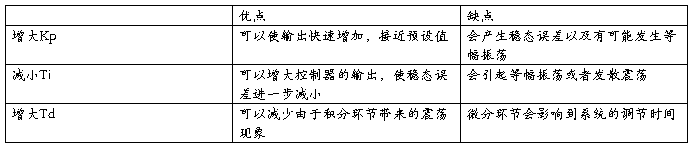
(2)、总结各个参数变化对于系统阶跃响应的影响,列入下表。
五、个人体悟
本次实验中通过试凑法对系统PID参数进行整定,直观地将课本中所学到的PID调节的理论知识运用到实践当中。由于对于理论的认识还不是足,导致调节过程较为缓慢,并且调节的方向不够明确。不过在助教的耐心讲解和本组同学不断摸索下,我们逐渐明确了每一步调节的目的,以及要完成此目的需要调节的参数。在这样的情况下,通过几次调节,我们得到了预期的结果。
总体而言,本次实验还是比较顺利的,个人收获也有不少。通过助教细致地讲解PID在实验中的运用后,我更深刻的认识了朱老师课堂上所讲授的内容。学习这样抽象的理论知识,我认为最为快捷和直观的方式就是通过做实验,而这次实验也确实达到了这样的目的,对我以后的学习有很大的帮助。
第二篇:单闭环仿真实验报告
单闭环控制系统仿真实验
作者(Author):田望同
(单位:江南大学-物联网工程学院, 地址:江苏无锡滨湖区蠡湖大道1800号,邮编:214122)
摘要:本实验针对单闭环控制系统,在空载和负载两种情况下,比例和积分性能。以软件仿真的形式,得到仿真曲线。
关键词:单闭环、空载、负载、仿真
Simulation experiment of single closed-loop control system
Abstractive:The experiment use single closed-loop control system,consider the system is no-loading and loading,when the system works in proportion case and integration case,to use software simulate and get simulation curve.
Key words:single closed-loop,no-load,load,simulate
引言(Introduction):在当今社会,科技飞速发展,生活和工作的各个部分,都向着自动化发展,电机拖动自动控制系统是实现自动化的基础成分之一。那么直流电机在空载和负载时,处于比例控制器和积分控制器的控制之下时,性能如何。本实验将从此展开。
意义(Significance):
模糊理论在直流电机调速中的应用--《烟草科技》1994年02期;
无刷直流电机调速系统中的电子换向器--《电机与控制应用》20##年03期;
双馈调速异步电机在风力发电中的应用--《上海大中型电机》20##年01期;
变频调速异步电动机的转差率--《西南交通大学学报》20##年01期;
无刷双馈调速电机的参数计算--《电工电能新技术》20##年03期;
变频调速电机的自动测控装置--《机床电器》20##年04期;
中板四辊轧机主电机调速系统动态性能分析--《江苏冶金》1999年06期;
基于MATLAB的电机调速系统的设计--《河海大学常州分校学报》20##年02期;
以上文献可以看出,有关电机的调速和控制,一直以来,都是一个重要的研究主题,在生活的各个方面,都有电机的存在,都需要控制。
实验内容:
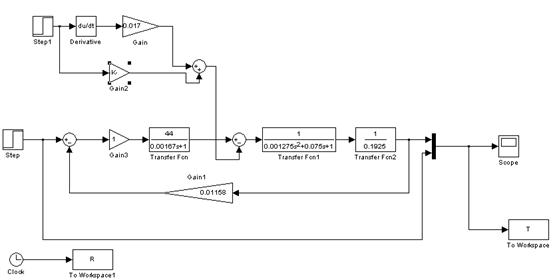
1. 实验原理:
通过simulink仿真,测试单闭环控制系统的性能。
参数选取为:α=0.01158V·min/r,R=1.0Ω,Ks=44,Ce=0.1925 V·min/r,GD2=10N·m2。
回路总电感:
现在:
则:
取:L=17mH=0.017H
则时间常数如下:
点此时间常数:
机电时间常数:
对于三相桥式整流电路,晶闸管装置的滞后时间常数为:
2.系统结构:
空载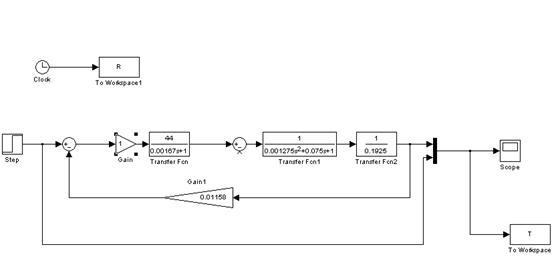
带负载
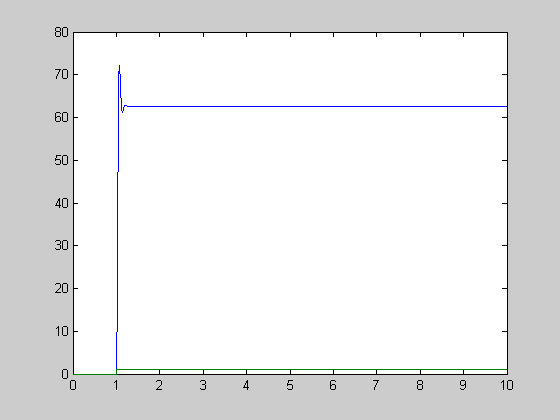
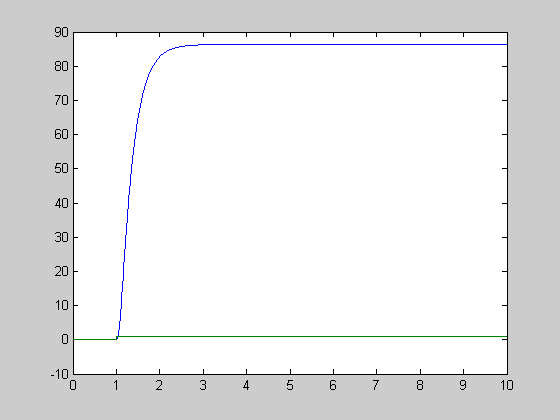
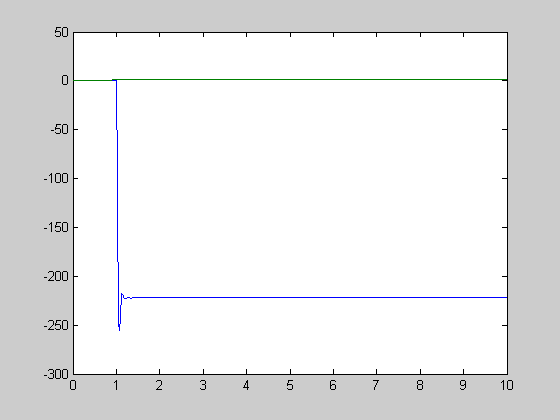
3.仿真结果:
空载比例
空载积分
负载比例
负载积分
4.结论:
通过仿真结果可以看到,加了负载之后转速会下降,但由于是闭环系统,负反馈可以使转速尽快恢复。显然,比例控制器会产生超调,而换成积分控制器之后,超调消失,仿真曲线平滑过渡。所以,积分控制器可以有效地消除偏差。
参考文献:
1. 陈伯时.电力拖动自动控制系统-运动控制系统(第三版).机械工业出版社.
2. 许建国.电机与拖动基础(第二版).高等教育出版社.
3. 潘丰,徐颖秦.自动控制原理. 机械工业出版社.
-
系统仿真实验报告
港口系统仿真课程实验报告实验报告题目系统仿真实验学院名称专业班级姓名学号日期系统仿真实验报告一实验目的本次实验主要是为了加深同学们…
-
系统仿真实验报告模版
控制系统仿真实验学习总结报告题目XXXXXXXXXXXX院系电子信息与控制工程系专业测控技术与仪器专业授课教师陈政强石玉秋本科生X…
-
仿真实验报告
系统工程仿真实验报告实验一基于VENSIM的系统动力学仿真一实验目的VENSIM是一个建模工具可以建立动态系统的概念化的文档化的仿…
-
大学物理仿真实验报告
大学物理仿真实验报告实验名称牛顿环法测曲率半径共6页系别理学院实验日期年月23日专业班级组别实验报告日期年月23日姓名学号报告退发…
-
仿真 实验报告
计算机仿真实验一姓名杨中欣学号11自动化1班一实验目的1学习SIMULINK的实验环境使用2掌握SIMULINK进行结构图仿真的方…
-
文明礼仪工作总结
古语云:为人子,方少时,亲师友,习礼仪。由此可见,从小学礼仪是非常重要的。可现在的一些孩子,因为长辈的宠爱而养成一些不良习气,如不…
-
后备干部工作总结
(广西有色金属集团汇元锰业有限公司机动能源部潘显俊)今年以来,在公司领导的正确领导下,在同事们的热情帮助与支持下,通过自身的不懈努…
-
20xx年学校禁毒教育工作总结
罗旧小学20xx年禁毒教育工作总结禁毒工作利在当代,功在千秋。我校深深认识到毒品预防教育工作一定要扎扎实实的开展工作,使全校学生真…
-
20xx年小学教师年度考核个人工作总结
班主任工作总结阿易蓉自从从事教师这一行,当一位好教师始终是我的奋斗目标。这学期,我始终以勤勤恳恳、踏踏实实的态度来对待我的工作,现…
-
学校法制校园工作总结
学校20xx年法制校园工作总结近年来,我校坚持依法治教,以德立校的办学思想,不断推进内部管理体制改革,学校民主管理和制度建设取得了…