大学物理实验==扭摆法测定物体的转动惯量实验数据处理
1.转动惯量的测定
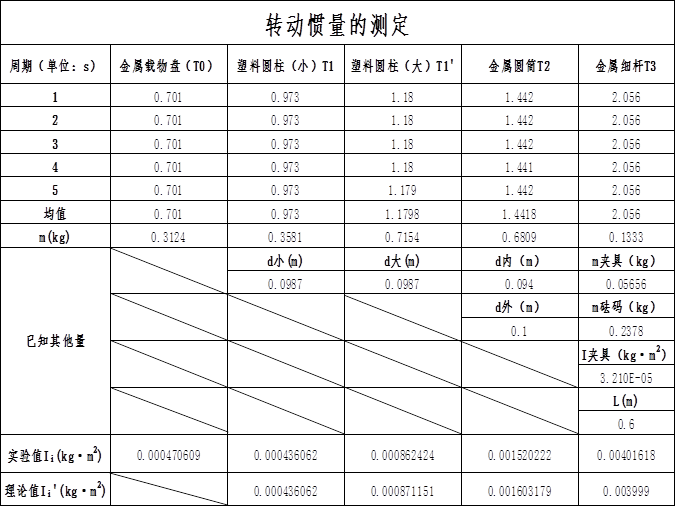 通过按照实验书中的相关方法,可以比较轻松的获得转动惯量的数据,记录如下。利用EXCEL进行数据的相关处理,如下表:
通过按照实验书中的相关方法,可以比较轻松的获得转动惯量的数据,记录如下。利用EXCEL进行数据的相关处理,如下表:
首先,求出周期的均值,I0对于金属载物盘需利用 公式进行计算,但是需要借助其他物体的转动惯量和周期才能够算出,因此,先计算塑料圆柱或者其他的物体的转动惯量。依据的公式如下:
公式进行计算,但是需要借助其他物体的转动惯量和周期才能够算出,因此,先计算塑料圆柱或者其他的物体的转动惯量。依据的公式如下:
塑料圆柱,(1) (2)
(2) ;
;
金属圆筒,(1) (2)
(2) ;
;
金属细杆,(1) (2)
(2) 。
。
计算的数值如上表。
计算相对百分比误差: B1=0, B1’=0.0100168897,
B2=0.051745605, B3=0.0042959794,
可以评价,上述数据的准确性还是比较好的。
二、验证平行移轴定理
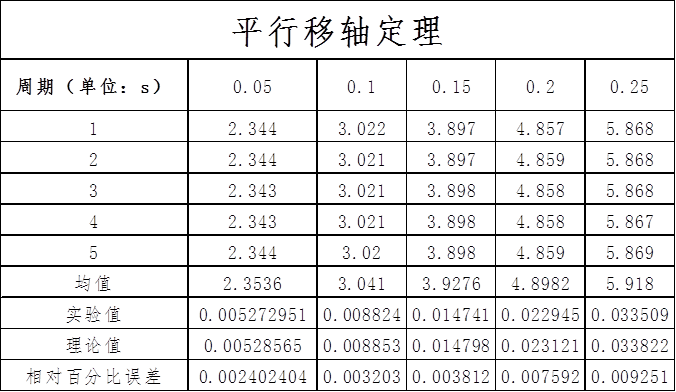 首先计算出,滑块的总转动惯量(x=0),I5=2[
首先计算出,滑块的总转动惯量(x=0),I5=2[ ],根据相关数据,可以计算出I5=8.071x10-5kg·m2,
],根据相关数据,可以计算出I5=8.071x10-5kg·m2,
利用公式 和公式I’=I4+2mx2+I5计算出上述理论值和实验值,并计算相对的百分比误差,实验的数据也是比较精确的美,并且理论和实验值很好的拟合,可以很好的验证平行移轴定理。
和公式I’=I4+2mx2+I5计算出上述理论值和实验值,并计算相对的百分比误差,实验的数据也是比较精确的美,并且理论和实验值很好的拟合,可以很好的验证平行移轴定理。
第二篇:《大学物理实验》2-05实验五 转动惯量的测定
实验五 转动惯量的测量
转动惯量是描述刚体转动中惯性大小的量度,它与刚体的质量分布及转轴位置有关。对于形状简单、质量分布均匀的物体,可以计算其定轴转动的转动惯量;但对于形状复杂、质量分布不均匀的刚体,其计算就非常困难,往往需要用实验的方法测定。例如:机械零部件、电机转子以及枪炮的弹丸等等。本实验采用三线扭摆法,通过扭转运动测量刚体的转动惯量,是常用的测量方法之一。其他的实验方法还有复摆法、扭摆法。
一、实验目的
1、学习用三线摆法测量物体的转动惯量;
2、理解转动惯量与质量分布的关系;
3、验证转动惯量的平行轴定理;
4、学习用激光光电传感器精确测量三线摆扭转运动的周期。
二、实验原理
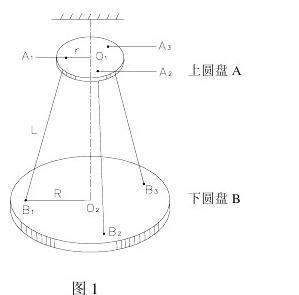
三线摆是将一个匀质圆盘,以等长的三条
细线对称地悬挂在一个水平的小圆盘下面构成
的。每个圆盘的三个悬点均构成一个等边三角
形。如图1所示,当底圆盘B调成水平,三线
等长时,B盘可以绕垂直于它并通过两盘中心
扭转的周期与下圆盘的轴线O1O2作扭转摆动,
(包括其上物体)的转动惯量有关,三线摆法正
是通过测量它的扭转周期来间接测量已知质量
物体的转动惯量。
由实验附1的推导可知,当摆角很小,三
悬线很长且等长,悬线张力相等,上下圆盘平
行,且只绕O1O2轴扭转的条件下,
下圆盘B对O1O2轴的转动惯量J0为: J0=m0gRr2T0 (1) 24πH
此为下圆盘B对O1O2轴的转动惯量。式中m0为下圆盘B的质量,r和R分别为上圆盘A和下圆盘B上线的悬点到各自圆心O1和O2的距离(注意r和R不是圆盘的半径),H为两盘之间的垂直距离,T0为下圆盘扭转的周期。
76
若测量质量为m的待测物体对于O1O2轴的转动惯量J,只须将待测物体置于圆盘上,设此时扭转周期为T,对于O1O2轴的转动惯量为:
J1=J+J0=(m+m0)gRr
4πH2T2 (2)
于是得到待测物体对于O1O2轴的转动惯量为:
J=(m+m0)gRr
4πH2T2?J0 (3)
上式表明,各物体对同一转轴的转动惯量具有相叠加的关系,这是三线摆方法的优点。为了将测量值和理论值比较,安置待测物体时,要使其质心恰好
和下圆盘B的轴心重合。
本实验还可验证平行轴定理。如把一个已知质量的圆柱体放
在下圆盘中心,质心在O1O2轴,测得其转动惯量为J3;然后把
用两个完全相同的圆柱其质心移动距离d,为了不使下圆盘倾翻,
体对称地放在圆盘上,如图2所示。设两圆柱体质心离开O1O2
轴距离均为d(即两圆柱体的质心间距为2d)时,其对于O1O2轴
的转动惯量为J4。设一个圆柱体质量为m,则由平行轴定理可得:
图2
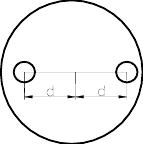
J4=md2+J3 (4) 2
将由上式计算得到的J4值与用实验实测所得的值进行比较,若在实验误差允许范围内两者相符的话,则转动惯量的平行轴定理就得到了验证。
三、仪器与用具
新型转动惯量测定仪平台(见图3)、米尺、游标卡尺、计数计时仪、水平仪,样品为圆盘、圆环及圆柱体3种。
计数计时仪使用说明
(一)原理
此仪器内设单片机,具有计时和计数功能。设置计数数值后,计数计时仪每接收到一个下降沿信号就计数一次,直至使用者设定的值。这时可从计时显示中读取发生触发信号所用的时间,例如:弹簧振动的周期、三线摆的摆动周期等。
(二)使用步骤
1、将主机后面板的航空插座与操作平台上的光电接收器上的航空插头相连接。仪器上的接线柱仅备用,+5V也可作电源(5V,0.5A),GND是接地,IN是触发信号输入端,可与传感器输出端相连。
2、打开电源,预置计数值,此时计数显示屏上将显示设定值,仪器处于等待状态, 77
仪器右上角的低电平指示灯为暗状态,(使用在激光光电传感器上时,等待状态为暗,每接收到一个触发信号,低平指示灯就亮一次;用在其它传感器上时,此灯等待状态为亮,接收到一个触发信号,低平指示灯就暗一次。)接收到触发信号后,计数计时仪开始计时。
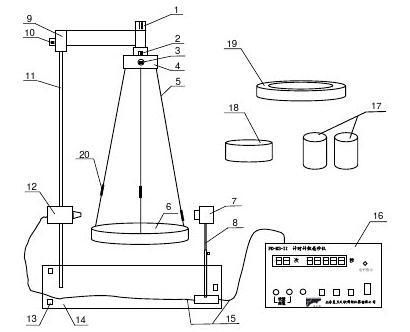
图3 转动惯量测定仪总图
1-启动盘锁紧螺母 2-摆线调节锁紧螺栓 3-摆线调节旋钮 4-启动盘 5-摆线(其中一根
线挡光计时) 6-悬盘 7-光电接收器 8-接收器支架 9-悬臂 10-悬臂锁紧螺栓
11-支杆 12-半导体激光器 13-调节脚 14-底板 15-连接线 16-计数计时仪 17-小圆柱样品
18-圆盘样品 19-圆环样品20-挡光标记
3、当计数至设定值后,可读出所用时间。这时再按“设定/阅览”键,转换为阅览功能,可阅览每次触发间隔的时间值。
(三)用途
本计时计数仪可用于单摆、气垫导轨、测量马达转速、产品计数等与计时有关的实验。
四、实验内容和步骤
1、调节三线摆
(1)调节上圆盘(启动盘)水平。将圆形水平仪放到旋臂上,调节底板调节脚,使其水平。
(2)调节下圆盘水平。将水平仪放至圆盘中心,调节摆线锁紧螺栓和摆线调节旋钮,使下圆盘水平。
2、调节激光器和计时仪
78
(1)先将光电接收器放到一个适当位置,后调节激光器位置,使其和光电接收器在一个水平线上。此时可打开电源,将激光束调整到最佳位置,即激光打到光电接收器的小孔上,计数计时仪右上角的低电平指示灯状态为暗。(注意此时
切勿直视激光光源)
(2)再调整启动盘,使一根摆线靠近激光束。(此时也可轻轻
旋转启动盘,使其在5度角内转动起来)
(3)设置计时仪的预置次数。(具体操作步骤见仪器介绍说明)
3、测量下圆盘的转动惯量J0
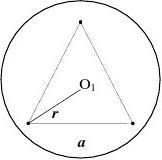
(1)用游标卡尺测量上圆盘悬点间间距a(见图4)和下圆盘
悬点间间距b,由此可根据三角形关系计算出上下盘悬点到盘心
的距离r和R,用游标卡尺测量圆盘的直径D1。
(2)用米尺测量上下圆盘之间的距离H。
(3)记录下圆盘的质量M0 。
(4)测量下圆盘摆动周期T0,轻轻旋转启动上圆盘,使下圆盘作扭转摆动(摆角<
5o),记录20个周期的时间。
4、测量下圆盘加圆环的转动惯量J1
(1)在下圆盘上放上圆环并使它的中心对准圆盘中心。
(2)测量下圆盘加圆环的扭转摆动周期T1。
(3)测量并记录圆环质量M1,圆环的内、外直径D内和D外。
5、测量下圆盘加圆盘的转动惯量J2
(1)在下圆盘上放上待测圆盘并使它的中心对准圆盘中心。
(2)测量下圆盘和待测圆盘的扭转摆动周期T2。
(3)测量并记录待测圆盘质量M2,直径D盘。
5、测量下圆盘加圆柱的转动惯量J3
(1)在下圆盘上放上待测圆柱并使它的中心对准圆盘中心。
(2)测量下圆盘和待测圆柱的扭转摆动周期T3。
(3)测量并记录待测圆柱质量M3,直径D柱。
6、验证平行轴定理
(1)将两个相同的圆柱体按照下圆盘上的刻线,对称的放在下圆盘上,相距一定的距离2d=D槽-D小柱 。
(2)测量扭转摆动周期T4。
(3)测量圆柱体的直径D小柱,下圆盘上刻线直径D槽 。 图4
79
五、数据记录与处理
1.数据记录
表一 各周期的测定
测 量 项 目
悬 盘 质 量 M0=
圆 环 质 量M1=
圆盘质量 M2=
圆柱体质量 M3=
2圆柱体
摆动周期数n1
20 周期时间
2 3 4 5
平均值 t/s 平均周期Ti=t/n
?
t/s
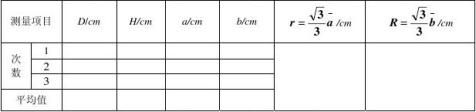
表二 上、下圆盘几何参数及其间距
表三 圆环、圆盘、圆柱体几何参数(单位cm)
测量项目
D内 D外
D盘
D小柱
D槽 2d=D槽-D小柱
次 数
平 均 值
80
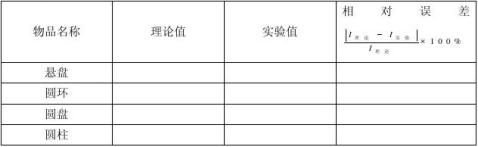
2.计算各转动惯量值与理论计算转动惯量值,并进行误差分析。
悬盘转动惯量计算式:J0=
m0gRr2
T0 4π2H(m+m0)gRr4π2H
T2?J0
待测物转动惯量计算式:J=
圆盘(或圆柱体) 转动惯量 理论计算式: J=圆环理论转动惯量计算式:J=
1
mD2 8
122mD内+D外 8
()
3.验证平行轴定理。
将两个直径为D的圆柱体放置在悬盘上,使它们的间距为2d,如图2所示,d为圆柱体中心轴线与转轴间距离,两圆柱体中心连线通过转轴。测得J4和J3 ,看在误差允许范围内是否满足(4)式。
六、注意事项
1、切勿直视激光光源或将激光束直射人眼。
2、做完实验后,要把样品放好,不要划伤表面,以免影响以后的实验。 3、移动接收器时,请不要直接搬上面的支杆,要拿住下面的小盒子移动。 4、启动盘及悬盘上各有平均分布的三只小孔,实验时用于测量两悬点间距离。 七、思考与问答
1、试分析式J0=轴重合?
m0gRr4πH
2
实验中应如何保证待测物转轴始终和O1O2T02成立的条件。
2、将待测物体放到下圆盘(中心一致)测量转动惯量,其周期T一定比只有下圆盘时大吗?为什么?
3、如何利用三线摆测定任意形状物体绕特定轴的转动惯量?
81
附1公式(1)的推导
设下圆盘的质量为m0 ,以小角度作扭转振动时,它沿O1O2轴线上升的高度为h,如图5所示,则势能为
Ep=m0gh (1)
当圆盘回转到平衡位置时,它具有的动能为:
Ek=12J0ω0 (5) 2
式中J0为下圆盘对于通过其质心且垂直于盘面的O1O2轴
略去摩的转动惯量,ω0为圆盘回到平衡位置时的角速度,
擦力,根据机械能守恒定律得 12J0ω0=m0gh (6) 2
把下圆盘小角度扭转振动作为简谐振动,则圆盘的角位移图5 2 图θ与时间t的关系为
θ=θ0sin2πt (7) T0
式中θ是圆盘在时间t的角位移,θ0是角振幅,T0是一个完全振动的周期,振动的初相位认为是0。则角速度为 ω=
在通过平衡位置时,ω0=2πdθ2π=θ0cost (8) dtT0T02πθ0 ,于是 T0
21?2π?J0?θ0?=m0gh (9) ??2?T0?
设悬线长度A1B1=L,上下圆盘悬点到中心的距离分别为r和R。当角振幅为θ0时,下圆盘轴向上移高度
AC2?AC'2
h=O2O=AC?AC= (10) 'AC+AC'
2'
由于
2AC2=AB2?BC2=L2?(R?r),
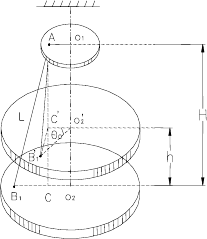
82
AC′2=AB′2?B′C′2=L2?R2+r2?2Rrcosθ0
所以
2Rr(1?cosθ0)4Rrsin2(θ0/2) (11) h==H+H?h2H?h()
由于θ0很小,sin2θ012≈θ0,h<<2H ,则得 24
2Rrθ0h= (11) 2H
代入(7)式并经整理,得到表达式为 Jm0gRr
0=4π2HT2
此即(1)式。
83(11)
-
扭摆法测转动惯量研究性实验报告
吞吞吐吐吞吞吐吐吞吞吐吐1121吞吞吐吐吞吞吐吐吞吞吐吐吞吞吐吐吞吞20xx吐吐物理研究性实验报告研究性报告扭摆法测转动惯量第一作…
-
扭摆法测定物体转动惯量
扭摆法测定物体转动惯量实验报告一实验目的1熟悉扭摆的构造使用方法和转动惯量测试仪的使用2利用塑料圆柱体和扭摆测定不同形状物体的转动…
-
扭摆法测定物体的转动惯量实验报告
扭摆法测定物体的转动惯量一实验目的1测定扭摆的仪器常数弹簧的扭转常数K2测定熟料圆柱体金属圆筒木球与金属细长杆的转动惯量3验证转动…
-
扭摆法测定物体转动惯量
扭摆法测定物体转动惯量实验报告一实验目的1熟悉扭摆的构造使用方法和转动惯量测试仪的使用2利用塑料圆柱体和扭摆测定不同形状物体的转动…
-
实验扭摆法测定刚体的转动惯量实验报告
扭摆法测物体的转动惯量实验报告一实验目的1测定弹簧的扭转常数2用扭摆测定几种不同形状物体的转动惯量并与理论值进行比较3验证转动惯量…
-
物理实验报告 - 扭摆法测定物体转动惯量
王皓平6100411063电III112班S0771600十一16T004实验名称扭摆法测定物体转动惯量一引言转动惯量是刚体转动时…
-
实验二扭摆法测物体的转动惯量(BIPT 标准实验报告)
实验二用扭摆法测定物体的转动惯量标准实验报告制作BIPT20xx38实验目的1测定几种不同形状物体的转动惯量和弹簧的扭转常数并与理…
-
实验扭摆法测定刚体的转动惯量实验报告
扭摆法测物体的转动惯量实验报告一实验目的1测定弹簧的扭转常数2用扭摆测定几种不同形状物体的转动惯量并与理论值进行比较3验证转动惯量…
-
扭摆法测定物体转动惯量
扭摆法测定物体转动惯量实验报告一实验目的1熟悉扭摆的构造使用方法和转动惯量测试仪的使用2利用塑料圆柱体和扭摆测定不同形状物体的转动…
-
3-2扭摆法测定物体的转动惯量
华南农业大学实验报告专业班次姓名日期一实验名称扭摆法测定物体的转动惯量二实验目的熟练掌握直尺游标卡尺数字式电子天平的使用熟悉扭摆的…
-
实验3.1 三线摆法测量物体的转动惯量数据处理
三线摆法测量物体的转动惯量实验数据处理数据处理ra75500b1602043590cmR92492cm317320xx173205…