扭摆法测物体的转动惯量物理实验研究性报告
扭摆法测定物体的转动惯量
实验原理:
转动惯量是刚体转动时惯性大小的量度,是表明刚体特性的一个物理量.刚体转动惯量除了与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度分布)有关。如果刚体形状简单,质量分布均匀,可以直接计算出它绕特定转轴的转动惯量。对于形状复杂,质量分布不均匀的刚体,计算将极为复杂,通常采用实验方法来测定,例如机械部件,电动机转子和枪炮的弹丸等。 转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征的物理量与转动惯量的之间的关系,进行转换测量.本实验使物体作扭转摆,由摆动周期及其它参数的测定计算出物体的转动惯量。
1.扭摆运动——角简谐振动

 (1)
(1)
此角谐振动的周期为  (2)
(2)
式中, 为弹簧的扭转常数式中,
为弹簧的扭转常数式中, 为物体绕转轴的转动惯量。
为物体绕转轴的转动惯量。
2.弹簧的扭转系数的测定:
实验中用一个几何形状规则的物体,它的转动惯量可以根据它的质量和几何尺寸用理论公式直接计算得到,
再由实验数据算出本仪器弹簧的值。方法如下:
(1)测载物盘摆动周期 ,由(2)式其转动惯量为
,由(2)式其转动惯量为
(2)塑料圆柱体放在载物盘上,测出摆动周期 ,由(2)式其总转动惯量为
,由(2)式其总转动惯量为
(3)塑料圆柱体的转动惯量理论值为
则由 ,得
,得 (周期我们采用多次测量求平均值来计算)
(周期我们采用多次测量求平均值来计算)
3.测任意物体的转动惯量:
若要测定其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,即可算出该物体绕转动轴的转动惯量。
根据2内容,载物盘的转动惯量为 
待测物体的转动惯量为
4.转动惯量的平行轴定理
实验内容与要求:
1.熟悉扭摆的构造及使用方法,以及转动惯量测试仪的使用方法。
2.测定扭摆的弹簧的扭转常数,写出 。
。
3.测定塑料圆柱(金属圆筒)的转动惯量 。并与理论值比较,求相对误差。
。并与理论值比较,求相对误差。
4.测定金属细杆+夹具的过质心轴的转动惯量 。
。
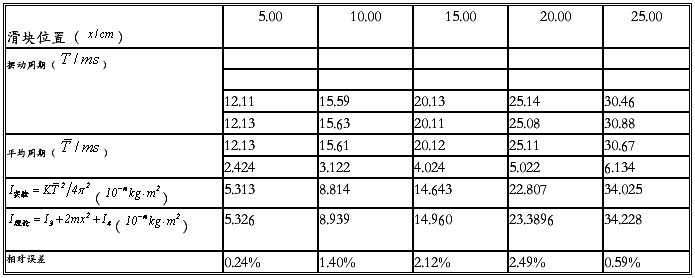
5.滑块对称放置在细杆两边的凹槽内,改变滑块在金属细杆上的位置,验证转动惯量平行轴定理。
仪器:
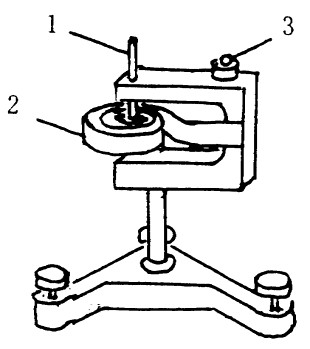
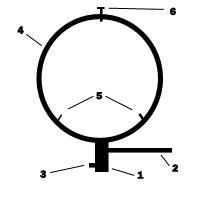
1.扭摆的构造如图1所示,在垂直轴1上装有一根薄片状的螺旋弹
簧2,用以产生恢复力矩。在轴的上方可以装上各种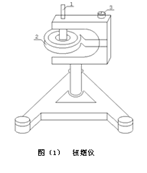 待测物体。垂直轴与支座间装有轴承,以降低磨擦力矩。3为水平仪,用来调整系统平衡。
待测物体。垂直轴与支座间装有轴承,以降低磨擦力矩。3为水平仪,用来调整系统平衡。
2.几种待测转动惯量的物体(实心塑料圆柱体、空心金属圆筒、
细金属杆和两个金属及支架等)。
3.天平。
4.游标卡尺。
5.转动惯量测试仪(计时精度0.001ms)
实验数据处理
一、扭摆法测转动惯量
原始数据列表
表1 实验器材参数表
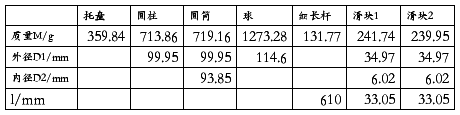
表2 实验数据列表

1.计算塑料圆柱的转动惯量 结果为8.914╳10-4㎏㎡
结果为8.914╳10-4㎏㎡
计算扭摆常数K 结果为0.0357㎏㎡/s2
结果为0.0357㎏㎡/s2
计算托盘的转动惯量 结果为5.318╳10-4㎏㎡
结果为5.318╳10-4㎏㎡
2.根据实验数据计算圆筒,球,和细长杆的转动惯量
圆筒 结果为1.64╳10-3㎏㎡
结果为1.64╳10-3㎏㎡
球 结果为 1.60╳10-3㎏㎡
结果为 1.60╳10-3㎏㎡
细长杆 结果为4.04╳10-3㎏㎡
结果为4.04╳10-3㎏㎡
3.计算圆筒,球,和细长杆的转动惯量的理论值
圆筒 结果为 1.69╳10-3㎏㎡
结果为 1.69╳10-3㎏㎡
球 结果为1.672╳10-3㎏㎡
结果为1.672╳10-3㎏㎡
细长杆 结果为4.27╳10-3㎏㎡
结果为4.27╳10-3㎏㎡
4.计算相对误差
圆筒:2.96% 球4.31% 细长杆5.4%
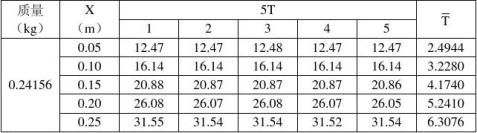
二、验证平行轴定理: 241.74g;
241.74g; 239.95g ;
239.95g ; 6.02mm ;
6.02mm ; 34.97mm 。
34.97mm 。
注:1.滑块的总转动惯量为
2.表中转动惯量的实验值和理论值的单位 均为10-3
均为10-3
对实验的反思以及进一步研究
一、 对实验中引起误差的因素的思考
1. 测量中扭摆转动时,器件各处的摩擦以及空气阻力使摆角很快减小,造成测量周期的误差。
2. 每次测量无法保证扭摆的角度均在40到90度之间。
3. 测量球和细长杆的转动换量是在一个金属支座上进行的,它会引起误差,属于系统误差,但由于支座质量多分布在转轴附近,转动惯量较小,其数量级一般不会超过其他因素带入的不确定度。但计算理论转动惯量的数值时不能将其支座的质量带入计算,因为本部分的质量分布形式不同。
4.
二、反思实验中的注意事项
1. 由于弹簧的扭转系数不是固定常数,与摆角有关,所以在实验中测周期时摆角应相同。弹簧扭摆常数K不是固定值,与扭摆角度略有关系,扭摆角在90度左右基本相同,因此在本试验过程中应该尽量保证操作过程中扭摆角度控制在90度左右。
2. 给扭摆初始摆角是应逆时针旋转磁柱,避免弹簧振动,且放手时尽量避免对磁柱施力。
3.被测物件避免磕碰。
4. 进行实验之前应该对仪器进行水平调节。只有扭摆调成水平后才能保证物体是在一个平面上转动,才能计算出物体对某个轴的转动惯量,其结果相对误差更小。
5. 在安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺钉旋紧,否则扭摆不能正常工作。
6. 进行实验之前应该保证扭摆上各个期间的螺丝拧紧,防止在实验过程中器件掉落损坏仪器。
三、一些试验中拓展问题的思考
1. 圆柱体的轴心与转轴重合放置时的转动惯量和圆柱体的轴心与转轴垂直,且质心通过转轴放置时的转动惯量相等吗?
答:不相等。
刚体对转轴的转动惯量的大小不仅与物体总质量有关,而且与物体的形状、大小、质量分布及转轴的位置有关,如果物体的质量是连续分布的,则对第一种情况:
J= ml2
ml2
对第二种情况:
J= ml2
ml2
其中l为圆柱的高。
2.在验证平行轴定理的时候为什么要将两滑块对称放置?
答:两块滑块不对称放置,则刚体系的惯量主轴不在转动轴上,对轴的附加压力很大,对仪器十分不利。如果对称放置,则两滑块对仪器主轴产生的是两个大小大约相等,方向相反的力矩,恰好可以相互抵消,对仪器的损害相对比较小。
四、对实验改进的一些建议
为了保证测定周期的过程中扭摆角度大约相同,可以在扭摆的托盘位置添加刻度读数,在转动扭摆的过程中可以有一个量化的估计,使测量结果相对更加准确。
第二篇:北航大学物理基础实验(A)研究性报告_转动惯量
学校代码10006
学 号12041163
分类号
密 级
物理实验(A)研究报告
扭摆法测量物体转动惯量
院
专
班系业名名称 称 级 能源与动力工程学院 飞行器动力工程 120415
冀疆峰(12041163)
左亢(12041158) 第一作者姓名 第二作者姓名
20xx年12月08日

声明
本实验和报告由第一作者和第二作者合作完成,所有试验数据真实有效。本实验报告完成过程中所有参考资料及文献均在报告中列出。未经作者授权,任何人不得以任何形式转载和无标注引用。
十分感谢指导本次实验的李进松老师!
Statement
Theseexperiment and reportare completed by the first author and second author in collaboration. All experimental data is true and effective. All references used in this report have been listed. Any person shall not be reprinted in any form without permission, or quoted withoutauthorization.
Great appreciation to Mr. Li for his help in the experiment!
摘要
转动惯量的测定实验是以实验验证物理推论的重要实验。本实验报告针对大学基础物理实验(A)中的“扭摆法测定转动惯量”(1010212),就实验原理、实验方法及实验结果进行了描述和总结,验证了转动惯量的平行轴定理,就实验各个过程中对实验结果造成误差的可能性因素做出了分析,并提出了一些对实验仪器和实验方法的改进及建议。
本实验数据均来自实验现场测量。其中,塑料圆柱、金属筒、塑料球、细杆和滑块的几何尺寸由实验室给出,其质量由电子天平测定。实验室给出的数据不考虑在误差内。
关键词:转动惯量扭摆法转动惯量平行轴定理
Abstract
Experimental determination of the moment of inertia is an important experiment to test and verify the physical inferences. This lab report are kind of description and summarization on principle, methods and results of “The moment of inertia of the pendulum method”(1010212), College FundamentalPhysics Experiment(A). The report also gives verification of the parallel axis theorem of moment of inertia, analysis of the possible factors causing deviation to the results during the experiment, recommendations of improvements on experimental equipment and test methods.
The experimental data are derived from the experimental field measurements. Among them, the geometries of plastic cylinder, metal barrel, plastic ball, thin rod and a pair of sliders are provided by the laboratory, with their masses are measured by an electronic balance. The given data is not considered within the error.
Keywords:
The moment of inertia
The pendulum method
The parallel axis theorem of moment of inertia
目录
一、实验原理................................................................................................................ 1
1.1扭摆构造.......................................................................................................... 1
1.2理论原理.......................................................................................................... 1
1.3转动惯量的平行轴定理.................................................................................. 2
二、实验仪器................................................................................................................ 2
2.1基本器材.......................................................................................................... 2
2.2计时系统说明.................................................................................................. 2
2.3仪器基本参数.................................................................................................. 2
2.3.1几何尺寸............................................................................................... 2
2.3.2质量....................................................................................................... 2
三、实验内容及主要步骤............................................................................................ 3
3.1扭摆法测量转动惯量...................................................................................... 3
3.1.1调整测量系统....................................................................................... 3
3.1.2测量数据............................................................................................... 3
3.1.3验证转动惯量平行轴定理的数据测量............................................... 3
四、实验数据及处理.................................................................................................... 4
4.1测定K值 ......................................................................................................... 4
4.2测定转动惯量.................................................................................................. 4
4.3验证转动惯量平行轴定理.............................................................................. 6
五、实验误差分析........................................................................................................ 7
六、实验经验及技巧总结............................................................................................ 7
七、实验感想................................................................................................................ 8
八、实验建议................................................................................................................ 8
8.1实验器材.......................................................................................................... 8
8.1.1维修与更换........................................................................................... 8
8.1.2改进....................................................................................................... 8
8.2实验方案.......................................................................................................... 9
九、参考文献................................................................................................................ 9
北京航空航天大学物理实验研究报告
一、 实验原理
1.1扭摆构造
扭摆构造如图1.1所示。扭摆由垂直轴、蜗簧、
水平仪和底座组成。垂直轴上有键槽,可以装夹实验
器具;垂直轴与底座间装有轴承,以尽可能的减小摩
擦力矩。蜗簧是一根弹性良好的薄片状螺旋弹簧,外
端与底座相连,内端与垂直轴相连,可以产生恢复力
矩。水平仪用来检查垂直轴是否垂直于水平面。底座
由三点调解法对扭摆的水平状态进行调节。
图1.1.1扭摆的构造
1.2理论原理 1-垂直轴,2-蜗簧,3-水平仪
将物体在水平面内转过一定角度θ后,在弹簧的恢复力矩的作用下,物体就开始绕垂直轴做往返扭转运动。
根据胡克定律,弹簧受扭转而产生的恢复力矩M与所转过的角度θ成正比,即
M??K?
式中,K为弹簧的扭转系数。根据转动定律M总?I?(I为物体绕转轴的转动惯
量,?为角加速度),忽略轴承的摩擦力矩,则有M总=M。令?2?
d2?K??2??????2? dtIK,得 I 上述运动表示扭摆运动具有角谐振动的特性:角加速度和角位移成正比,且方向相反此方程的解为
??Acos(?t??)
式中,A为谐振动的角振幅,?为初相位角,?为角频率。此谐振动的周期为

T?2?
??2利用该式,测得扭摆的摆动周期后,在I和K中任何一个量已知,即可计算出另一个量。
本实验用一个几何形状规则的物体(圆柱),其转动惯量可由其质量和几何尺寸用理论公式直接计算得到,再算出本仪器弹簧的K值。若要测定其它物体的转动惯量,只需要将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周
期,由上式即可换算出物体的转动惯量。
1
第二章实验仪器
1.3转动惯量的平行轴定理
若质量为m的物体,绕过质心轴的转动惯量为Ic当转轴平行移动距离x时,此物体对新轴线的转动惯量变为Ic?mx2。这称作转动惯量的平行轴定理。
二、 实验仪器
2.1基本器材
扭摆、金属载物盘、塑料圆柱体、金属空心筒、实心塑料球、带固定槽的金属细长杆、与细长杆配套的滑块、数字式计时器、电子天平。
2.2计时系统说明
本实验计时器采用光电门和电脑计数器结合,能测量5个或10个周期的时间。采用累加放大法,多个周期总时间测量再取平均值,可以减少因单个周期测量时间较短造成的偶然误差。
2.3仪器基本参数
2.3.1几何尺寸
塑料柱(pl)直径Dpl=99.95mm=0.09995m;
金属桶(ma)外直径Dma=99.95mm=0.09995m,内直径dma=93.83mm=0.09983m; 塑料球(ba)直径Dba=108.1mm=0.1081m;
金属细杆长度Lst=610.00mm=0.61000m,金属杆上固定槽距离分别为5cm、10cm、15cm、20cm和25cm;
滑块(单个)内直径d滑=6.02mm=6.02?103m,外直径D滑=34.97mm=0.03497m,
长度h=33.05mm=0.03305m。
2.3.2质量
质量由实验过程中测得。
2
北京航空航天大学物理实验研究报告
三、 实验内容及主要步骤
3.1扭摆法测量转动惯量
3.1.1调整测量系统
用水平仪调整仪器水平,设置计时器。因为测量次数较少,为减小误差,将计时器计时周期调为10。
3.1.2测量数据
①装上金属载物盘,测定其摆动周期T0;将塑料圆柱体垂直装卡在载物盘上,测出摆动周期Tpl,测定扭摆的弹簧扭转常数K。
提示:
i 安装时要旋紧止动螺丝,否则摆动数次后摆角可能会明显减小甚至停止。 ii 光电探头宜放置在挡光杆的平衡位置处,挡光杆(片)不能和它相接触,以免增大摩擦阻力。
iii 弹簧的扭转常数K不是固定常数,它与摆动角度略有关系,摆角在90°~40°间基本相同,在小角度时变小。因此,整个实验中应保持摆角基本在这一范围内。
iv 由测出的T0和Tpl,再结合公式推导出扭转常数K的计算公式,其中圆柱的转动惯量Ipl由理论公式算出,视为已知量。
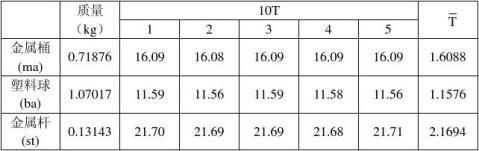
②测定金属圆桶、塑料球与金属细长杆的转动惯量。列表时注意给出各待测物体的转动惯量的测量公式(金属圆桶Ima、塑料球Iba、金属细长杆Ist)和理论计算公式(金属圆桶Jma、塑料球Jba、金属细长杆Jst)。
3.1.3验证转动惯量平行轴定理的数据测量
将滑块对称的放置在细杆两边的凹槽内,测出摆动周期Ti。滑块绕过质心且平行于其端面的对称轴旋转,其转动惯量的理论计算公式为 11222 J滑=m滑(D+d)+mh滑滑滑1612
其中,m滑是滑块质量,d滑、D滑是滑块的内外直径,h是滑块的长度。
3
第四章实验数据及处理
四、 实验数据及处理
4.1测定K值
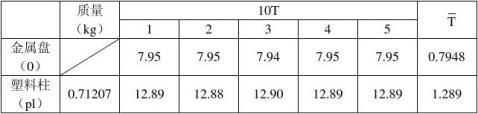

T?2T?I?K()22?
TplT
I0?K(0)2,I0?Ipl?K()2
2?2?4?2Ipl
K?2
Tpl?T02
圆柱体绕过其端面圆心的垂线的转动惯量为
11
J?mR2?mD2
28
由理论计算值代替此处塑料圆柱的转动惯量,即Ipl?Jpl,计算得
1
4??2??0.71207?0.099952
22 K?kg?m?0.0341kg?m22
1.289?0.7948
I0?K(
Tpl
1.28921
)2?Ipl?[0.0341?()??0.71207?0.099952]kg?m2?5.4596?10?4kg?m22?2??8
4.2测定转动惯量
4
北京航空航天大学物理实验研究报告
TK20.03412?42?32
Ima?K(ma)2?I0?2Tma?I0?[?1.6088?5.4596?10]kg?m?1.6896?10kg?m
2?4?4??2
TK20.0341
Iba?K(ba)2?2Tba?[?1.15762]kg?m2?1.1575?10?3kg?m2 2
2?4?4??
TK0.0341
Ist?K(st)2?2Tst2?[?2.16942]kg?m2?4.0651?10?3kg?m2 2
2?4?4??
理论计算值:
11
Jma?m(R2?r2)?[?0.71876??0.099952?0.093852?]kg?m2?1.6889?10?3kg?m2
28
21
Jba?mR2?[?1.07017?0.10812]kg?m2?1.2506?10?3kg?m2
510
11
Jst?ml2?[?0.13143?0.610002

]kg?m2?4.0754?10?3kg?m2
1212 比较
百分差计算公式??实验值-理论值
?100%
理论值5
第四章实验数据及处理
4.3验证转动惯量平行轴定理
设y=a+bx,令y=T2,x=x2,由一元线性回归计算可得:
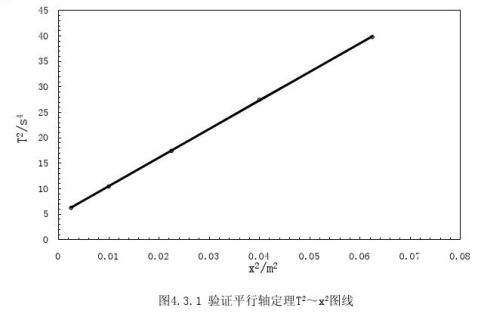
b=
xy?xyx?x
2
2
?560.7884
a?y?bx?4.8420 r?
由r值可以看出,该线性关系良好。
?0.99996
实际由平行轴定理得到的关系式为
6
北京航空航天大学物理实验研究报告
28?m滑24?2
2T?x?2J滑x?0?Jst KK ??
由该式计算得到的b?559.3191,η=0.2620%。
则在误差允许的范围内,转动惯量平行轴定理成立。
五、 实验误差分析
1.器材配合不严密造成的误差。在实验过程中发现蜗簧与垂直轴之间的紧固螺丝出现松脱,小球与小球底座之间不牢固易晃动。这些消耗了蜗簧恢复力矩的功,使实验结果可能偏小。但是没有具体数据,无法进行定量分析。
2.扭摆底座不水平造成的误差。扭摆底座的水平调节是靠一个小型气泡水平仪完成的,精度十分低,而且在实验过程中对试验台的轻微晃动都有可能造成底座水平状态被破坏。但是因为无法确定该误差对实验结果的影响情况,故此处不予过多讨论。
3.质量测量和长度测量引起的误差。该误差可能是实验结果偏大,也可能偏小,属于随机误差。
4.仪器的系统误差。仪器由于老旧等问题造成的不可测量和消除的误差,该误差可能是实验结果与正常结果相比偏小。
5.实验方案不完善造成的误差。在称量塑料球质量时,因为底座无法从塑料球中取出(如果取出,塑料球上的凹槽对小球体积和质量的影响会使测得的周期更长,从而使测量结果偏大),造成测量的周期偏长,实验结果偏大;在称量金属细杆质量时,取下了支座,使得测量金属细杆的转动惯量偏大。
6.测量K值的误差和K值计算的积累误差。摆动时间过长会是摆角过小;温度变化会影响蜗簧特性,使结果产生误差;在计算时,由于用K值带入计算,可能由K值的误差传递到结论的误差,使误差增大。
六、 实验经验及技巧总结
在本次试验中,由于之前未见过实验器具,对实验器具的操作流程不熟悉,当装夹上金属载物盘和塑料圆柱时,由于固定螺丝未旋紧,造成扭摆和载物盘之间产生晃动,使得测得的数据偏小,而且数据递减很快,扭摆很快停下来。发现不对后及时停止实验,并检查问题,并一度认为是扭摆除了问题。后来在耐心检查后终于发现问题所在。排除问题后得到完美的实验结果,金属桶的转动惯量计算相对误差大约为0.04%。
在本次实验中发现,在验证平行轴定理时,如果只在金属细杆一边放置滑块,或两边放置滑块不对称,细杆的摆动衰减会非常厉害(因为时间原因未能测量具体数值)经思考后,认为由于细杆在支点两端质量分布不均匀,导致细杆滑块系统质心不在支点处,从而对垂直轴产生了十分大的摩擦力矩;而且因为重心的偏
7
第七章实验感想
移导致细杆的摆动平面不平行于水平面,系统除蜗簧的恢复力矩外还受到一个微小的重力矩,该重力矩无法平衡,导致实验失败。因此,在验证转动惯量平行轴定理时,应该选择刚性更大的金属细杆和配合更紧密的扭摆。
七、 实验感想
本次实验因为开始对实验器具的不熟悉导致初次数据测量失败,这让我学到在实验开始之前应该尽量熟悉实验器具的结构和用法,以免类似错误再次发生。
本次实验再次加深了对一元线性回归算法的理解。在验证线性关系时,一元线性回归算法提供了强大的工具,且为自变量和因变量的线性判据(r)做出了很好的定量描述。本次试验因为器具原因未计算不确定度。
在撰写实验论文时,掌握了数学公式输入的软件Mathtype,能较为熟练的输入常用的数学公式进行计算和输出。对未来的学术论文撰写打下了基础。
物理实验是一门严谨、务实的学科,因为它的价值大多数依赖于实验精度,因此认真做实验,忠实李禄院士数据和认真计算就显得尤为重要。在本次实验和以往的所有物理实验中我都深深的感受到了这一点:不管是什么学科,严谨务实、实事求是、一丝不苟的态度绝对是完成一个学科活动所必须的品质。
八、 实验建议
8.1实验器材
8.1.1维修与更换
在实验过程中,发现部分器材有严重的磨损和老化现象,如金属载物盘的固定螺丝很难拧紧,塑料圆柱上有积垢和磕碰痕迹,塑料圆球的支架和球体有松动使得转动轴线不过球心等。最为严重的是验证平行轴定理的金属细杆有弯曲,造成不可忽视的重力矩和摩擦力矩,大大降低了实验精度。
这些器材需要维修或更换的,应该及早进行。
8.1.2改进
(1)在测量塑料球的转动惯量时,因为无法拆除支架,导致实验结果偏大。改为可拆卸的环形支架,如图7.1.2.1.1。固定脚和支架固定螺丝互成120°角。环形支架直径略大于球直径。在塑料球的球直径切面圆周上有互成120°的三个浅孔,便于装卡。试验时,先测量环形支架的转动惯量,再装卡塑料球测量整体的转动惯量,最后相减即可。虽然多了一组测量数据,但却会使实验精度更高。
(2)由于实验时,扭转角大于90°时会引起K值的变化,建议在扭摆上加
8
北京航空航天大学物理实验研究报告
装可调节的限位器,保证第一次的扭转角不
大于90°。
8.2实验方案
对实验方案的建议基于实验器材受环境
影响的程度。蜗簧的材料和多螺旋结构使其K
值在气微小变化时或长时间工作后,有非常
明显的增大或减小。因此本实验应该选用两
种(或以上)材料制成的蜗簧扭摆在一个气
1.垂直杆固定座。2.遮光杆。3.固定座固定温基本恒定的时间进行实验。对最后计算出的转动惯量值去除误差后取平均。该
螺丝。4.环形支架。5固定脚。6.支架固定方法优点在于能进一步提高实验精度,最大可能的排除扭摆对实验结果产生的误
螺丝。 差;缺点在于实验次数较多,降低了实验的简单可行性。
九、 参考文献 图8.1.2.1.1 环形支架示意图
[1]李朝荣,徐平,唐芳等.基础物理实验.北京:北京航空航天大学出版社.2010(1).
[2]吴百诗,罗春荣,马永庚等.大学物理学.北京:高等教育出版社.2011(8).
[3]谢传峰,王琪,程耀等.理论力学.北京:高等教育出版社.2011(2).
9
-
扭摆法测转动惯量研究性实验报告
吞吞吐吐吞吞吐吐吞吞吐吐1121吞吞吐吐吞吞吐吐吞吞吐吐吞吞吐吐吞吞20xx吐吐物理研究性实验报告研究性报告扭摆法测转动惯量第一作…
-
扭摆法测定物体转动惯量
扭摆法测定物体转动惯量实验报告一实验目的1熟悉扭摆的构造使用方法和转动惯量测试仪的使用2利用塑料圆柱体和扭摆测定不同形状物体的转动…
-
扭摆法测定物体的转动惯量实验报告
扭摆法测定物体的转动惯量一实验目的1测定扭摆的仪器常数弹簧的扭转常数K2测定熟料圆柱体金属圆筒木球与金属细长杆的转动惯量3验证转动…
-
扭摆法测定物体转动惯量
扭摆法测定物体转动惯量实验报告一实验目的1熟悉扭摆的构造使用方法和转动惯量测试仪的使用2利用塑料圆柱体和扭摆测定不同形状物体的转动…
-
实验扭摆法测定刚体的转动惯量实验报告
扭摆法测物体的转动惯量实验报告一实验目的1测定弹簧的扭转常数2用扭摆测定几种不同形状物体的转动惯量并与理论值进行比较3验证转动惯量…
-
大学物理实验之用三线摆测物体的转动惯量
大学物理实验之用三线摆测物体的转动惯量1了解三线摆原理并以此测物体的转动惯量2掌握秒表游标卡尺等测量工具的使用方法掌握测周期的方法…
-
实验4 用三线摆测刚体的转动惯量
实验4用三线摆测刚体的转动惯量教学目的1在实验中加深对转动惯量概念的理解2学会用三线摆测刚体的转动惯量3验证转动惯量的平行轴定律教…
-
刚体转动惯量的测定实验报告
刚体转动惯量的测定物本1001班张胜东20xx09110024李春雷20xx09110059郑云婌20xx091100195刚体转…
-
大学物理实验报告 测量刚体的转动惯量
测量刚体的转动惯量实验目的1用实验方法验证刚体转动定律并求其转动惯量2观察刚体的转动惯量与质量分布的关系3学习作图的曲线改直法并由…
-
转动惯量实验报告模板
实验二刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度它取决于刚体的总质量质量分布形状大小和转轴位置对于形状简单质量均匀分布的…
-
《用三线摆法测定物体的转动惯量》的示范报告
用三线摆法测定物体的转动惯量的示范报告竺江峰20xx年3月18日一教学目的1学会用三线摆测定物体圆环的转动惯量2学会用累积放大法测…