机电系统创新与实践实验报告
机电系统创新与实践实验报告
班级:01311001
学号:1120100151
姓名:刘峰
慧鱼探索者机器人
一、 实验目的
(1)认识了解“慧鱼”探索者机器人的工作原理;
(2)了解ROBOPRO软件及编程;
(3)了解慧鱼创意模型是如何控制和协调机构运动的,并熟悉慧鱼创意模型的组装。
二、设计内容
随着现代社会的发展,人们的作业环境愈加复杂化,为了完成某类特殊任务,人们不得不进入危险环境。然而人的生命健康是无价的,面临这样的问题人类不断探索智能化机器人以代替人的活动,从而降低人的劳动强度,避免危险环境的侵害。例如在具有高强度辐射环境或高温度环境下作业或搜寻特殊珍贵物品,在具有不明爆炸物危险时,在地震导致土层疏松及地表面凹凸不平、出现较大沟壑等情况下开展救援或搜寻工作等,这些活动对操作人员存在巨大的生命威胁。设计要求机器人可以代替人完成危险任务。
三、实验器材
(1)机器人“探索者”创意模型组合包;
(2)“慧鱼”专用电源;
(3)个人计算机;
(4)“慧鱼”专用智能接口板;
(5)ROBOPRO软件。
四、实验准备
认识“慧鱼”创意模型使用手册中已搭建的示例模型。找齐所组装的机器人“探索者”所需的器件,并准备好螺丝刀等工具。
五、实验内容
1、参照“慧鱼”创意模型使用手册对机器人“探索者”进行组装。
2、编写控制程序,实现机器人“探索者”的前进、转弯、避障控制。
3、将程序导入,接通电源对机器人进行运动测试。
4、针对测试时出现的问题进行相应的修正。
5、整理实验台,将个零件进行分类放置。

探索者完成图
六、实验总结和体会
这次实验意义比较大,通过对探索者机器人的组装和测试,了解到其前进和转弯的运动方式 ,同时很好的锻炼了我们的动手和合作能力。
慧鱼单臂电焊机器人
一、 实验目的
(1)认识了解“慧鱼”单臂电焊机器人的工作原理;
(2)了解ROBOPRO软件及编程,并对单臂电焊机器人行为进行编程控制;
(3)了解慧鱼创意模型是如何控制和协调机构运动的,并熟悉慧鱼创意模型的组装。
二、实验器材
(1)单臂电焊机器人创意模型组合包;
(2)“慧鱼”专用电源;
(3)个人计算机;
(4)“慧鱼”专用智能接口板;
(5)ROBOPRO软件。
三、实验准备
找齐所组装的单臂电焊机器人所需的器件,并准备好螺丝刀等工具。准备好电脑,并安装好ROBOPRO软件。
四、实验内容
1、对单臂电焊机器人进行组装
2、使用ROBOPRO软件编写程序,实现单笔电焊机器人自行转动手臂到相应位置进行焊接的运动,此处焊接采用LED灯闪亮的方式代替。
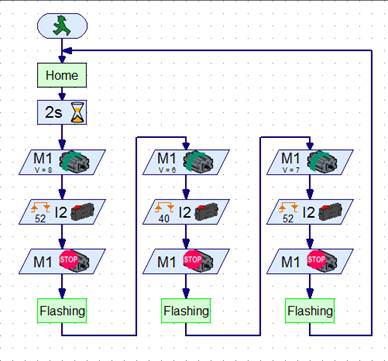
单臂电焊机器人程序图
3、将程序导入,接通电源,对单臂电焊机器人进行运动调试。
4、针对调试结果对单臂电焊机器人控制程序以及组装部件进行相应的调整。
5、整理实验台,将个零件进行分类放置。
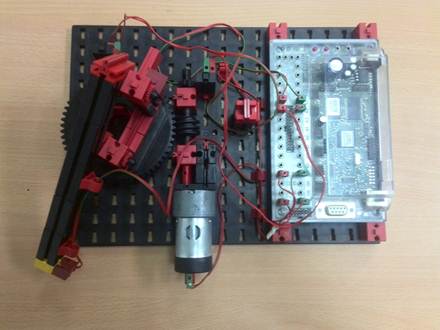
单臂电焊机器人完成图
五、作者承担工作情况(仅限本人所做工作)
1、完成的工作在模型起的作用:
我们一共四人,我在一起工作中承担的责任是寻找器材零件,在询问组装同学的情况下,得知他们需要哪些零件,同时哪些零件在实验室里面缺少!以及等候其他小组组装完成后拆卸部分我们需要的零件!
2、完成工作过程中遇到的问题及解决方法:
问题:在寻找零件会遇到零件不足和零件暂时没有的情况,或者零件损坏,让组装的进度慢下来,同时把组装时候多余的零件放回到以前零件放的地方!
解决方法:首先明确实验所需器材的种类及数量尽量记在心里,对每一个找到的部件都认真分辨其是否完好,提高寻找速度,同时在寻找零件的同时注意保护其他我们不需要的零件的完好!
六、实验总结和体会
在这次锻炼中,我特别感觉到一个团队更需要的是团结,一个团队就是一个集体,大家的力量才是真正的力量。只有团结,才能克服困难,走向成功。
第二篇:创新认知与实践实验报告
创新认知与实践-七彩霓红灯控制系统
七彩霓红灯控制系统的PLC控制认知与实践的主要内容包括:设计七彩霓红灯的硬件模型、编写I/O分配表、画PLC接线图、编写梯形图程序以及程序的调试和运行。用于培养自动化等专业学生的实践教学。
1、七彩霓红灯控制系统的控制要求:
七彩霓红灯如图1所示。信号灯由一个启动按钮控制,当按下启动按钮时,系统按如下顺序工作:
七彩霓虹灯有三组,分别是第1组、第2组、第3组,工作过程是:启动按钮按下后,第1组亮1s后停止,第2组亮1s后停止,第3组亮1s后停止,第1、2、3组同时亮1s,第1、2、3组同时灭1s,第1、2、3组同时亮1s,第1、2、3组同时灭1s后开始下一个循环。
系统停止的要求,当按下停止按钮时,系统停止工作。
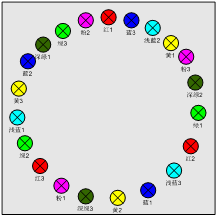
图1 七彩霓红灯示意图
2、时序图:
根据七彩霓虹灯的控制要求,七彩霓虹灯的时序图如图2所示。
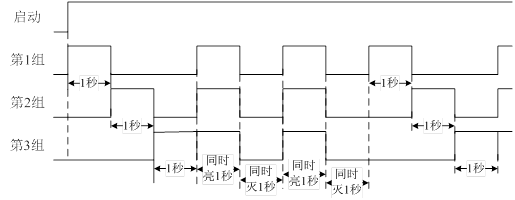
图2 七彩霓虹灯时序图
3、I/O地址分配表:
根据七彩霓虹灯的控制要求,本系统所用的硬件包括西门子S7-300 PLC、启动按钮SB1、停止按钮SB2、七彩信号灯各3只。
系统的I/O地址分配表如表1所示 。
表1 I/O地址分配表

4、系统接线图:
根据七彩霓虹灯的控制要求,PLC接线图如图3所示 。
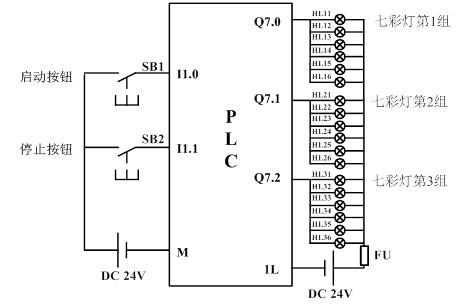
图3 七彩霓虹灯PLC接线图
5、元器件表:

6、梯形图程序:

-
创新实践报告
课程设计报告目录一实验目的和要求1二实验仪器和设备1三实验过程1四设计报告2五设计心得及体会10一实验目的和要求进一步推动高等教育…
-
创新实践报告感想1
时间飞逝啊我们转眼间就到了大三啦我们不再是纯粹的学习也要学会自己去创造东西而不是一味的学习啦大学阶段既是一个接受教育的过程又是一个…
-
创新实践报告
创新实践课程实验报告项目名称纸质桥梁创意设计与制作姓名学号专业班级姓名学号专业班级姓名学号专业班级姓名学号专业班级姓名学号专业班级…
-
创新实践报告
创新实践课程实验报告项目名称枯树枝和废旧光碟制作储物筐项目组组成员姓名陈丹蕊姓名曹春姓名张宇杰姓名姓名指导教师王银玲学号20xx2…
-
大学生创新实践项目结项报告
大学生实践创新训练项目结项报告项目名称高校学生干部与非学生干部的认知方式与性格特征对其职业期待的影响主持人所在单位南京师范大学教育…
-
C++课程设计报告 运动会分数统计系统
C++课程设计报告运动会分数统计系统一.需求分析1问题描述运动会分数统计系统参加运动会有n个系,系编号为1n。比赛分成m个男子项目…
-
电机与运动控制系统_实验报告2
实验报告课程名称电机与运动控制系统实验第3次实验实验名称直流他励电动机在各种运行状态下的机械特性实验时间20xx年xx月xx日实验…
- 管理信息系统实验报告
-
管理信息系统实验报告
实验项目企业信息化及实验地点经管系机房T301实验日期20xx年6月15日实验项目电子商务系统设计实验地点经管系机房T301实验日…
-
运动控制MATLABsimulink实验报告
运动控制MATLABSIMULINK仿真实验实验报告姓名罗才宝学号0953505008班级09自动化时间20xx年4月25日1单闭…
-
机械创新设计-实验报告模板
机械创新设计方法实验报告班级机械制造五班姓名曾懿学号123004010526指导教师张巍20xx年7月2日实验题目压力抽气式取水器…