嵌入式系统课程设计报告样例
《嵌入式系统应用》课程设计报告
设计课题:基于STM32的直流电机调速
专业班级: 11电气1班
学生姓名: 朱帅
指导教师: 蔡海滨
设计时间: 20##--2015第1学期
工程技术学院
直流电机控制程序设计
摘要:STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。本次使用的是STM32F103“增强型”系列。增强型系列时钟频率达到72MHz,从闪存执行代码,STM32功耗36mA,是32位市场上功耗最低的产品,相当于0.5mA/MHz。工作原理:是通过改变输出方波的占空比使负载上的平均电流功率从0-100%变化,从而改变直流减速电机速度。利用脉宽调制(PWM)方式,实现调速,它的优点是电源的能量功率,能得到充分利用,电路的效率高。
关键字:占空比 PWM输出 控制 STM32 电机 人机交互
设计概述及基本要求
用单片机编程实现直流电机的控制过程,要求:具有电压调速
第一章 系统概述
1.1 总框图设计
根据设计要求,我们把设计主要分为两个模块:显示模块,直流电机调速模块。
其原理图如下:
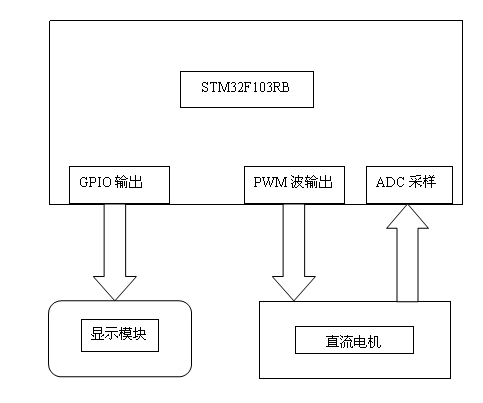
系统简介:
打开电源之后,电源指示灯亮,屏幕显示电机的控制电压,单片机根据采集的电压值进行PID调节,使电机的电压稳定在设定的值(电机的转速和电压成正比)
第二章 单元电路设计与分析
显示部分:
//写寄存器函数
void LCD_WR_REG(u8 data)
{
LCD_RS_CLR;//写地址
LCD_CS_CLR;
DATAOUT(data);
LCD_WR_CLR;
LCD_WR_SET;
LCD_CS_SET;
}
#else//正常IO
//写寄存器函数
void LCD_WR_REG(u8 data)
{
LCD_RS=0;//写地址
LCD_CS=0;
DATAOUT(data);
LCD_WR=0;
LCD_WR=1;
LCD_CS=1;
}
void LED_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA时钟
RCC->APB2ENR|=1<<5; //使能PORTD时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;//PA8 推挽输出
GPIOA->ODR|=1<<8; //PA8 输出高
GPIOD->CRL&=0XFFFFF0FF;
GPIOD->CRL|=0X00000300;//PD.2推挽输出
GPIOD->ODR|=1<<2; //PD.2输出高
}
PWM输出部分:

相关代码:
void PWM_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<1; //TIM3时钟使能
GPIOA->CRL&=0X0FFFFFFF;//PA7输出
GPIOA->CRL|=0XB0000000;//复用功能输出
GPIOA->ODR|=1<<7;//PA7上拉
TIM3->ARR=arr;//设定计数器自动重装值
TIM3->PSC=psc;//预分频器不分频
TIM3->CCMR1|=7<<12; //CH2 PWM2模式
TIM3->CCMR1|=1<<11; //CH2预装载使能
TIM3->CCER|=1<<4; //OC2 输出使能
TIM3->CR1=0x8000; //ARPE使能
TIM3->CR1|=0x01; //使能定时器3
}
第三章 主体代码
/* 沉木冰悟 */
#include "stm8s_hard.h"
float det; //误差参数、采样参数
u16 kk=0;
u16 pid_sum=0;
u16 pid_i_sum=0;
/************************************************************************
* Function Name : PI算法函数
* Description : PI算法
* Input : Pi_temp实测参数,PID_NUM控制参数
* Output : None
* Return : None
************************************************************************/
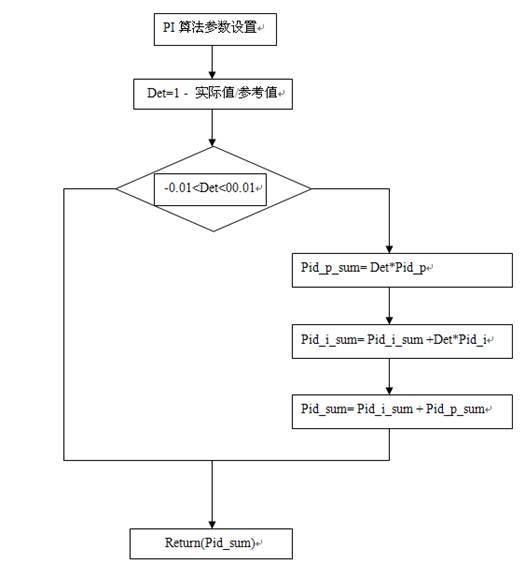
u16 PI_MATH(float Pi_temp,u16 PID_NUM,u16 PID_max)
{
det=0;
det=1-Pi_temp/Pi;
if (det>0.01||det<-0.01) //超出误差范围,进行调整
{
pid_i_sum=pid_i_sum+det*pid_i; //求出i的离散积分
kk=(int)(det*pid_p);
pid_sum=kk+(int)pid_i_sum;
if ((PID_NUM+pid_sum)<0) //最小为0,否则为负数 PID_NUM=0;
else
PID_NUM=PID_NUM+pid_sum;
if (PID_NUM>PID_max)
PID_NUM=PID_max; //占空比最大不能超过95%
}
return(PID_NUM);
}
主函数部分:
int main(void)
{
/*各模块初始化*/
。。。。。。。。。。。。。
//显示提示信息1
。。。。。。。。。。。。。
//显示提示信息2
。。。。。。。。。。。。
while(1)
{
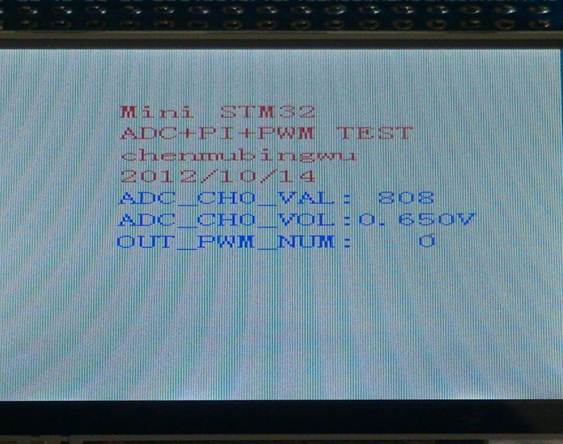
adcx=Get_Adc(ADC_Channel_0);
LCD_ShowNum(156,130,adcx,4,16); //显示ADC的VAL值
PI(); //PI调节输出的PWM脉宽
LCD_ShowNum(156,170,PWM_NUM,4,16); //显示输出的PWM值
temp=(float)adcx*(3.3/4096);
adcx=temp;
LCD_ShowNum(156,150,adcx,1,16);//显示电压值1
temp-=adcx;
temp*=1000;
LCD_ShowNum(172,150,temp,3,16);//显示电压值2
}
}
第四章 结束语
本设计特点、存在的问题及改进意见:
在进行本设计时,充分利用mini开发板已有资源,对按键等硬件进行复用,极大地发回来已有器件的功用.
参考文献
[1]黄智伟.ARM9嵌入式系统设计基础教程[M].北京:北京航空航天大学出版 , 2006
[2]庄海军.基于S3C2410的IIS音频总线研究及其驱动实现[M].淮安教出版社, 2008
附件:
元器件明细表

第二篇:嵌入式系统课程设计实验报告
嵌入式系统课程设计必做部分
学院:电控学院
专业:通信工程
设计名称:IIC同步串行通讯
1、设计的目的:
1.掌握S3C44B0IIC控制器的编程方法
2.编程实现串行EEPROM存储器24C16的数据存储和访问。
2、设计的内容:
1.学习S3C44B0 IIC控制器的原理与编程方法;
2.学习IIC存储器24C16的编程方法;
3.理解IIC存储器24C16的与S3C44B0的电路连接原理;
4.掌握C语言中断程序设计方法;
5.编程实现对24C16的数据存储和访问。
3、设计思路、遇到的问题及解决方法:
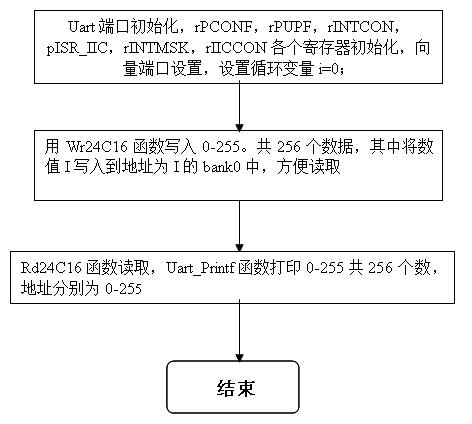
此次试验,我们结合《嵌入式系统原理及应用》教材以及老师提供的各种pdf和word资料,了解到了各种寄存器的配置方法,如IICDS等。对于例程中的各种函数,如Wr24C16(), Rd24C16(),__irq IicInt()等,通过对程序的仔细研读,最终了解了它们的各自用途,并在此基础上,编写了主函数。实现了从0-255共256个字节的写入及读取操作。
这次实验我们遇到了不少的难题,像开始使用ARM-Project Manager平台一开始,由于对此平台的不了解,我们走了许都弯路。像对于头文件的配置问题,总是配置不对,后来发现头文件为程序自主生成,无需配置。还有关于程序中的一些.s文件,开始并不知道是有何作用,后来在老师的指点下,发现有必要将其加入到sourse文件栏中调用,同时调用的同时,由于不理解调用的路径问题,多次编译失败,后来发现了问题,是路径配置不当,最终更改了路径,解决了问题。
再有,在对老师提供的例程进行阅读时候,发现了不少的啰嗦以及错误语句,例如Uart_Printf("%d\n",k);语句就不应该为Uart_Printf("%d\n",&k);这些问题我们都通过调试最终给予了改正。
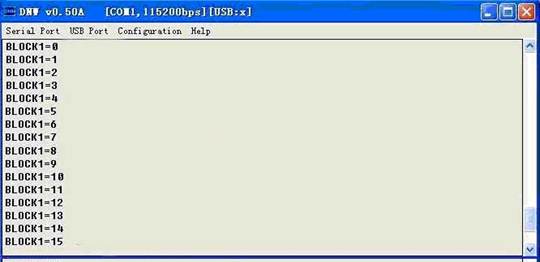
4、设计的结果及验证
正确输出结果如下截图,从超级终端中回显显示了正确数据,实验成立。
 5、程序流程图如下:
5、程序流程图如下:

6、全部源代码如下(可验证)
#include <string.h>
#include "C:\ARM251\44b0\44b.h"
#include "C:\ARM251\44b0\44blib.h"
#include "C:\ARM251\44b0\Def.h"
#include "C:\ARM251\44b0\iic.h"
#include "C:\ARM251\44b0\Option.h"
#include <stdarg.h>
#include <string.h>
#include <stdlib.h>
#include <stdio.h>
#include <ctype.h>
#define WRDATA (1)
#define POLLACK (2)
#define RDDATA (3)
#define SETRDADDR (4)
#define IICBUFSIZE 0x20
U8 _iicData[IICBUFSIZE];
volatile int _iicDataCount;
volatile int _iicStatus;
volatile int _iicMode;
int _iicPt;
void __irq IicInt(void);
void Wr24C16(U32 slvAddr,U32 addr,U8 data)
{
_iicMode=WRDATA;
_iicPt=0;
_iicData[0]=(U8)addr;
_iicData[1]=data;
_iicDataCount=2;
rIICDS=slvAddr;//0xa0 ,写 移位寄存器
rIICSTAT=0xf0; //MasTx,Start
//Clearing the pending bit isn't needed because the pending bit has been cleared.
while(_iicDataCount!=-1);//中断完成,总线不忙,可以传送,同时移位寄存器已经准备好两个数据量
_iicMode=POLLACK;
while(1)
{
rIICDS=slvAddr; // 0xa0 ,写 移位寄存器
_iicStatus=0x100;
rIICSTAT=0xf0; //MasTx,Start
rIICCON=0xaf; //resumes IIC operation.IIC-BUS控制寄存器
while(_iicStatus==0x100); //rIICSTAT数值发给iicStatus,0xf0
if(!(_iicStatus&0x1)) // Last-received bit is 0 (ACK was received),判断ack是否收到数据
break; // when ACK is received
}
rIICSTAT=0xd0; //stop MasTx condition IIC-bus不忙
rIICCON=0xaf; //resumes IIC operation.
Delay(1); //wait until stop condtion is in effect.
//write is completed.
}
void Rd24C16(U32 slvAddr,U32 addr,U8 *data)
{
_iicMode=SETRDADDR; //写模式开启
_iicPt=0; //data【】的计数器
_iicData[0]=(U8)addr; //取地址
_iicDataCount=1;
rIICDS=slvAddr; //移位寄存器地址联系
rIICSTAT=0xf0; //MasTx,Start ,总线忙
//Clearing the pending bit isn't needed because the pending bit has been cleared.
while(_iicDataCount!=-1);
_iicMode=RDDATA;
_iicPt=0; //数组数据变量
_iicDataCount=1; //?
rIICDS=slvAddr; //设置移位寄存器输出地点
rIICSTAT=0xb0; //MasRx,Start IIC-bus不忙
rIICCON=0xaf; //resumes IIC operation. 总线控制
while(_iicDataCount!=-1);
*data=_iicData[1];
}
void __irq IicInt(void) //中断挂起
{
U32 iicSt,i; //?
rI_ISPC=BIT_IIC; //?
iicSt=rIICSTAT; //写入fo,d0,
if(iicSt&0x8){} // when bus arbitration is failed. IIC-bus仲裁过程状态标志位
if(iicSt&0x4){} // when a slave address is matched with IICADD IIC-bus从地址状态标志位
if(iicSt&0x2){} // when a slave address is 0000000b IIC-bus 地址为0状态标志:
if(iicSt&0x1){} // when ACK isn't received IIC-bus上一次接收到的状态标志位
switch(_iicMode)
{
case POLLACK:
_iicStatus=iicSt;
break;
case RDDATA:
if((_iicDataCount--)==0)
{
_iicData[_iicPt++]=rIICDS;
rIICSTAT=0x90; //stop MasRx condition , Master receive mode IIC-bus不忙,Enable Rx/Tx
rIICCON=0xaf; //resumes IIC operation.
Delay(1); //wait until stop condtion is in effect.
//too long time...
//The pending bit will not be set after issuing stop condition.
break;
}
_iicData[_iicPt++]=rIICDS; //0,1
//The last data has to be read with no ack.设置应答位,读取时为NO应答位
if((_iicDataCount)==0)
rIICCON=0x2f; //resumes IIC operation with NOACK.
else
rIICCON=0xaf; //resumes IIC operation with ACK
break;
case WRDATA:
if((_iicDataCount--)==0) //2 ,1,0,-1
{
rIICSTAT=0xd0; //stop MasTx condition IIC-bus不忙
rIICCON=0xaf; //resumes IIC operation.总线控制
Delay(1); //wait until stop condtion is in effect.
//The pending bit will not be set after issuing stop condition.
break;
}
rIICDS=_iicData[_iicPt++]; //_iicData[0] has dummy.传送两次,数据和地址
for(i=0;i<10;i++); //for setup time until rising edge of IICSCL
rIICCON=0xaf; //resumes IIC operation.
break;
case SETRDADDR:
//Uart_Printf("[S%d]",_iicDataCount);
if((_iicDataCount--)==0) //1,0
{
break; //IIC operation is stopped because of IICCON[4]
}
rIICDS=_iicData[_iicPt++]; //第一次开始传入数据地址,addr
for(i=0;i<10;i++); //for setup time until rising edge of IICSCL
rIICCON=0xaf; //resumes IIC operation. 在发送模式 读时,没有中断
break;
default:
break;
}
}
Main(void)
{
unsigned int i;
U8 k;
Port_Init();
Uart_Init(0,115200);
Uart_Select(0); //which Uart
rPCONF |= 0xa; //port F的配置 00001010 IICSCL,IICSDA
rPUPF |= 0x0; //port F的上拉电阻配置寄存器,允许上拉电阻连接到对应脚
rINTCON=0x1; //支持向量中断 见书66页
pISR_IIC=(unsigned)IicInt;//中断服务,指向
rINTMSK&=~(BIT_GLOBAL|BIT_IIC); //中断屏蔽寄存器,0允许,默认为1
rIICCON=(1<<7)|(0<<6)|(1<<5)|(0xf); //af 见书83页
//rIICADD=0x10;
//rIICSTAT=0x10; 见书84页
for(i=0;i<255;i++)
{
Wr24C16(0xa0,(U8)i,i);
}
for(i=0;i<255;i++)
{
Rd24C16(0xa1,(U8)i,&k);
Uart_Printf("%d\n",k);
}
}
-
嵌入式课程设计报告
福建工程学院嵌入式系统课程设计报告书题目基于S3C2440设备驱动及其界面设计班级姓名学号指导老师陈靖张平均李光炀2目录一设计课题…
-
嵌入式系统课程设计报告
嵌入式系统课程设计报告基于ARM的楼宇对讲系统设计摘要采用模块化设计方法设计出一款基于ARM微控制芯片和Linux操作系统的楼宇对…
-
嵌入式系统课程设计报告模版
XXXX课程设计报告课程名称嵌入式系统设计题目专业班级学生姓名学生学号指导老师二一三年一月八日目录1概述111背景112设计目标2…
-
嵌入式系统课程设计报告
嵌入式系统课程设计报告设计任务一十字路口交通灯控制一设计目的1了解基于ARM7核的LPC2106的管脚功能和特点掌握IO控制寄存器…
-
嵌入式课程设计报告(范例,含排版要求)
湘南学院华文行楷小初课程设计报告华文行楷60号字课程名称嵌入式系统原理二号楷体GB2312实验题目嵌入式操作系统的内存管理模拟专业…
-
嵌入式课程设计报告
福建工程学院嵌入式系统课程设计报告书题目基于S3C2440设备驱动及其界面设计班级姓名学号指导老师陈靖张平均李光炀2目录一设计课题…
-
嵌入式课程设计实验报告
湖南科技大学计算机科学与工程学院嵌入式系统设计与开发实验报告书题目远程温光数据监测系统班级12级计算机一班姓名刘政材学号120xx…
-
20xx061316 叶尔多斯 嵌入式系统课程设计报告
课程设计报告基于ARM的嵌入式电子点菜系统班学姓级号名09061320xx061316叶尔多斯海拉提20xx年10月1题目基于AR…
-
嵌入式系统课程设计报告
中南大学嵌入式系统实验设计报告指导老师吴志虎李志民设计者连金涛专业班级测控0801班学号0909081012时间20xx年6月1实…
-
嵌入式系统课程设计报告模版
XXXX课程设计报告课程名称嵌入式系统设计题目专业班级学生姓名学生学号指导老师二一三年一月八日目录1概述111背景112设计目标2…
-
嵌入式系统实训报告
重庆航天职业技术学院课程作业课程名称嵌入式系统专选班级学号姓名成绩前言嵌入式系统是基于单片机的一种升级版它是以应用为中心以计算机技…