用拉伸法测材料弹性模量
实验21 用拉伸法测杨氏模量
林一仙
1 实验目的
1)掌握拉伸法测定金属杨氏模量的方法;
2)学习用光杠杆放大测量微小长度变化量的方法;
3)学习用作图法处理数据。
2 实验原理
相关仪器:
杨氏模量仪、光杠杆、尺读望远镜、卡尺、千分尺、砝码。
2.1杨氏模量
任何固体在外力使用下都要发生形变,最简单的形变就是物体受外力拉伸(或压缩)时发生的伸长(或缩短)形变。本实验研究的是棒状物体弹性形变中的伸长形变。
设金属丝的长度为L,截面积为S,一端固定,
 一端在延长度方向上受力为F,并伸长△L,如图
一端在延长度方向上受力为F,并伸长△L,如图
21-1,比值:
 是物体的相对伸长,叫应变。
是物体的相对伸长,叫应变。
 是物体单位面积上的作用力,叫应力。
是物体单位面积上的作用力,叫应力。
根据胡克定律,在物体的弹性限度内,物体的应力与应变成正比,即

则有
 (1)
(1)
(1)式中的比例系数Y称为杨氏弹性模量(简称杨氏模量)。
实验证明:杨氏模量Y与外力F、物体长度L以及截面积的大小均无关,而只取决定于物体的材料本身的性质。它是表征固体性质的一个物理量。
根据(1)式,测出等号右边各量,杨氏模量便可求得。(1)式中的F、S、L三个量都可用一般方法测得。唯有 是一个微小的变化量,用一般量具难以测准。本实验采用光杠杆法进行间接测量(具体方法如右图所示)。
是一个微小的变化量,用一般量具难以测准。本实验采用光杠杆法进行间接测量(具体方法如右图所示)。
2.2光杠杆的放大原理
如右图所示,当钢丝的长度发生变化时,光杠杆镜面的竖直度必然要发生改变。那么改变后的镜面和改变前的镜面必然成有一个角度差,用θ来表示这个角度差。从下图我们可以看出:
 (2)
(2)
 这时望远镜中看到的刻度为
这时望远镜中看到的刻度为 ,而且
,而且 ,所以就有:
,所以就有:
 (3)
(3)
采用近似法原理不难得出:
 (4) 这就是光杠杆的放大原理了。
(4) 这就是光杠杆的放大原理了。
将(4)式代入(1)式,并且S=πd2,即可得下式:

这就是本实验所依据的公式。
2.3 实验步骤
1)将待测金属丝下端砝码钩上加1.000kg砝码使它伸直。调节仪器底部三脚螺丝,使G平台水平。
2)将光杠杆的两前足置于平台的槽内,后足置于C上,调整镜面与平台垂直。
3)调整标尺与望远镜支架于合适位置使标尺与望远镜以光杠杆镜面中心为对称,并使镜面与标尺距离D约为1.5米左右。
4)用千分尺测量金属丝上、中、下直径,用卷尺量出金属丝的长度L。
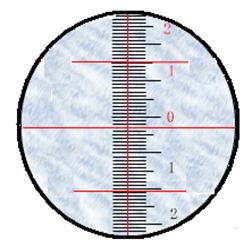
5)调整望远镜使其与光杠杆镜面在同一高度,先在望远镜外面附近找到光杠杆镜面中标尺的象(如找不到,应左右或上下移动标尺的位置或微调光杠杆镜面的垂直度)。再把望远镜移到眼睛所在处,结合调整望远镜的角度,在望远镜中便可看到光杠杆镜面中标尺的反射象(不一定很清晰)。
6)调节目镜,看清十字叉丝,调节调焦旋钮,看清标尺的反射象,而且无视差。若有视差,应继续细心调节目镜,直到无视差为止。检查视差的办法是使眼睛上下移动,看叉丝与标尺的象是否相对移动;若有相对移动,说明有视差,就应再调目镜直到叉丝与标尺象无相对运动(即无视差)为止。记下水平叉丝(或叉丝交点)所对准的标尺的初读数 ,一般应调在标尺0刻线附近,若差得很远,应上下移动标尺或检查光杠杆反射镜面是否竖直。
,一般应调在标尺0刻线附近,若差得很远,应上下移动标尺或检查光杠杆反射镜面是否竖直。
7)每次将1.000kg砝码轻轻地加于砝码钩上,并分别记下读数 、
、 、…、
、…、 ,共做5次。
,共做5次。
8)每次减少1.000kg砝码,并依次记下记读数 ,
, ,…、
,…、 。
。
9)当砝码加到最大时(如6.000kg)时,再测一次金属丝上、中、下的直径d,并与挂1.000kg砝码时对应的直径求平均值,作为金属丝的直径d值。
10)用卡尺测出光杠杆后足尖与前两足尖的距离h,用尺读望远镜的测距功能测出D(长短叉丝的刻度差乘100倍)。
11)用图解法处理实验数据确定测量结果及测量不确定度。
2.4注意事项
1)光杠杆及镜尺系统一经调好,中途不得再任意变动,否则所测数据无效。
2)加、减砝码要细心,须用手轻轻托住砝码托盘,不得碰动仪器;而且需待钢丝伸缩稳定后方可读数。
3)在测量钢丝伸长量过程中,不可中途停顿而改测其他物理量(如d、L、D等),否则若中途受到另外干扰,则钢丝的伸长(或缩短)值将发生变化,导致误差增大。
3 数据处理
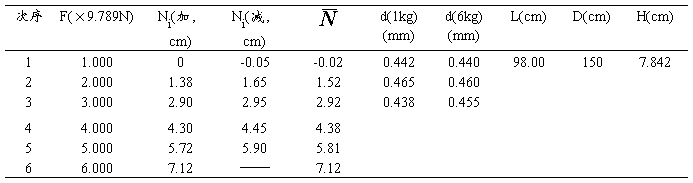
1) 实验数据记录表格
表1相关数据的测量
2) 用作图法处理数据确定 的测量结果及不确定度;
的测量结果及不确定度;



3) 计算钢丝的杨氏模量的测量结果及不确定度。

 ;
;
 ;
;



4 实验结果:

5 思考题(讨论)
1)本实验为什么用不同仪器来测定各个长度量?
2)光杠杆法能否用来测量一块薄金属片的厚度?如何测量?
3)调节光杠杆镜尺系统时,若遇到下列现象时你将如何处理(即如何调节)?
(1)用望远镜找标尺的像时,看到了光杠杆的镜面,而看不到标尺的像。
(2)某一同学已调好的光杠杆系统(他确已调好了),但你去看时感到标尺的像很模糊。
第二篇:拉伸法测弹性模量
§2.2 拉伸法测弹性模量
实验目的:
1.测钢的弹性模量,并验证虎克定律。
2.掌握用光杠杆测微小长度变化的原理和方法。
3.学会用逐差法处理数据。
4.学习不确定度分析的应用。
实验原理:
一、固体材料的弹性模量
弹性模量(Modulus of elasticity)是描述固体材料抵抗形变能力的重要物理量,是选定机械构件的依据之一,是工程技术中常用的参数。
由胡克定律,在弹性限度内,弹簧的弹力F的大小和弹簧伸长(缩短)的长度X成正比,即
 (2.2.1)
(2.2.1)
式中常数 称为劲度系数,它不仅与物体的材料有关,还和物体的几何形状有关,它是具体物体的一个常数。
称为劲度系数,它不仅与物体的材料有关,还和物体的几何形状有关,它是具体物体的一个常数。
事实上,虎克定律不仅适用于弹簧体,一般固体受拉(压)伸长(缩短)产生的弹力都遵从(2.2.1)式所表示的关系。为了不使物体的几何形状对材料弹性的研究产生影响,我们取棒状物体作为样品,折算成单位长度和单位横截面积来确定表征材料弹性的系数。
设长为L、横截面积为A的一个棒状物体,两端受拉力F后,伸长量为X,则比值F/A是单位横截面上的作用力叫做应力,它决定了物体的形变;比值X/L是单位长度的伸长,叫做应变,它表示物体形变的大小。这时虎克定律可表达为:
 (2.2.2)
(2.2.2)
式中常数Y称为弹性模量,也叫杨氏模量,它只决定于构成物体的材料的性质,不再与几何形状有关。弹性模量Y的国际单位制单位名称是帕〔斯卡〕,单位符号是Pa,1Pa=1N/m2。
二、弹性模量的测定
本实验要测定钢的弹性模量,由(2.2.2)式知,需要进行力和长度两方面的测量。由于物理实验室不能提供很大的力,所以取一段粗细均匀的钢丝作为待测样品。把钢丝的上端固定,下端加砝码,使之受拉力作用而伸长。则(2.2.2)式中弹力F等于砝码所受的重力,即
 (2.2.3)
(2.2.3)
钢丝的截面积A,通过测量钢丝的直径 可得到
可得到
 (2.2.4)
(2.2.4)
钢丝长 可用米尺测出。
可用米尺测出。
上述量弹力F、横截面积A和钢丝长都可用一般方法测出,但是微小长度X很小,约1mm左右,要用我们迄今了解的测长仪器如千分尺测量,在技术上还难以实现。为此,本实验采用了光杠杆放大的原理,进行间接测量,得测X的公式如下:
 (2.2.5)
(2.2.5)
式中的R、n、D分别用卡尺和米尺测出。这样,把测X转化为可用一般方法测量的量。解决了测量上的难题。把(2.2.3)、(2.2.4)、(2.2.5)式代入(2.2.2)式,则得本实验的数学模型为
 (2.2.6)
(2.2.6)
式中D、R、n的意义在下面介绍。
三、光杠杆测微小伸长的原理
图2.2.1(a)是不等臂杠杆绕支点O转动的情况,当两端点分别产生位移AA′= X,BB′= n
时,若OB>>OA,n便是X的放大结果,其放大倍数为

光杠杆是以一段光线为长臂的放大系统。由T型支架平面镜(也称为光杠杆)、望远镜及标尺而组成。T型支架的落地点,是脚T3和T1T2边。T3与T1T2边距离为R,是光杠杆的短臂,长短可调,望远镜和标尺安装在同一支架上。
在测量微小伸长时,如图2.2.1(c)所示,将T型支架平面镜的T1T2边放入平台的沟槽内,T3脚被放在待测钢丝的下端能随长度改变的夹具上。观察用的望远镜和标尺被放在距离平面镜架为D处。调整好的光杠杆装置,应该从望远镜中能看清楚由光杠杆平面镜反射的标尺的像,并由望远镜叉丝得到标尺的读数。
设钢丝在未加砝码时,平面镜架如图2.2.1(c)虚线位置,此时在望远镜中测量准线处的标尺读数为 ;当加砝码后,钢丝长度L发生X改变时,T3脚也随之变动,并以T1T2边为轴转过
;当加砝码后,钢丝长度L发生X改变时,T3脚也随之变动,并以T1T2边为轴转过 角,如图2.2.1(c)实线位置,因而使平面镜的法线转过角,则平面镜的入射光线与反射光线之间的夹角为2角,此时在望远镜中准线处的标尺读数变成为
角,如图2.2.1(c)实线位置,因而使平面镜的法线转过角,则平面镜的入射光线与反射光线之间的夹角为2角,此时在望远镜中准线处的标尺读数变成为 。令
。令 ,根据三角关系有
,根据三角关系有  和
和  ,
,
由于钢丝的伸长很小,R>>X,角也是一个微小量,近似地有
 ,
,  ,
,
由此可得 ,
式中 是标尺读数的改变量,D是标尺到平面镜架支轴T1T2边的距离,可由卷尺测出,R是光杠杆的长度,可由米尺测出。这样就把不易测量的微小伸长量X转换成了用一般方法可测量的量,而且把微小伸长X放大为。定义光杠杆的放大倍数为
是标尺读数的改变量,D是标尺到平面镜架支轴T1T2边的距离,可由卷尺测出,R是光杠杆的长度,可由米尺测出。这样就把不易测量的微小伸长量X转换成了用一般方法可测量的量,而且把微小伸长X放大为。定义光杠杆的放大倍数为
 。
。
在一般实验中,R为4~8厘米,D为1~2米,放大倍数可达到25~100倍。与图1.2.1(a)的杠杆相比,光杠杆的长臂是入射光与反射光的全程2D,短臂是R。

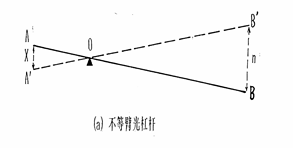

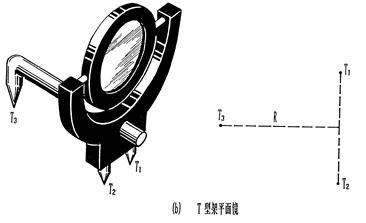

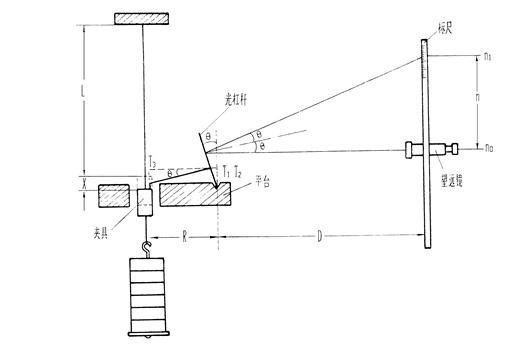
图2.2.1 光杠杆放大原理
实验仪器
一、仪器
弹性模量测定仪,砝码(0.5kg×9个),光杠杆装置(光杠杆、望远镜、标尺),千分尺(用法见§2.1节实验仪器介绍),卷尺,米尺。
二、仪器安装和调整
1. 如图2.2.2所示,将光杠杆镜架的T1T2边放在平台的沟槽内,调节R长短使脚T3架在夹钢丝的圆柱夹具上面,使望远镜与标尺刻线向着光杠杆镜面。
2.粗调光杠杆系统。用眼睛观察调整光杠杆平面镜镜面竖直和标尺竖直,调整望远镜水平且与镜面中心等高,沿着望远镜筒的上方(有缺口和准星)能在镜中看到标尺的反射像。
3.细调光杠杆系统。主要是调试望远镜,望远镜的光路如图2.2.3。物理实验使用的望远镜和显微镜一般都具有测量的功能,所以它们除了目镜、物镜之外,还有叉丝这一组成部分。望远镜的调节方法如下:
(1)调节目镜。旋转目镜筒,改变目镜和叉丝之间的距离,使在视场中见到清晰的叉丝。由于各人的视力不同,所以要适应实验者的视力,另外叉丝是测量的准线,使用前要调清晰。
(2)调焦。旋转望远镜筒中部侧面的调焦钮,改变叉丝所在平面与物镜之间的距离(像距),使由目镜观察到的标尺像清晰,并旋转目镜筒,使横叉丝与标尺刻线平行,作为读数时的准线。
(3)视差的消除。经调焦后,叉丝和标尺像都已看清晰,但在目镜前有一小段距离,只要叉丝和物像都在这一段距离内,人眼都能看清晰,然而叉丝与物像并不一定重合,如图2.2.4(a)所示,如果二者有 距离的差别,就造成了视差。如图2.2.4(b),当眼睛在目镜前与准线垂直的方向来回移动时,就产生了叉丝和物像之间有相对位置的变化,这种现象就是视差。消除的办法就是继续细心地调焦,直至这一现象消失,如图2.2.4(c)所示,叉丝K和物像B处于同一平面。
距离的差别,就造成了视差。如图2.2.4(b),当眼睛在目镜前与准线垂直的方向来回移动时,就产生了叉丝和物像之间有相对位置的变化,这种现象就是视差。消除的办法就是继续细心地调焦,直至这一现象消失,如图2.2.4(c)所示,叉丝K和物像B处于同一平面。
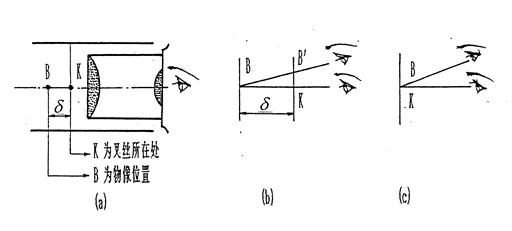
图2.2.4 视差与消除图
实验内容
一、用拉伸法测钢的弹性模量
1.用千分尺测量钢丝直径,在不同位置处测5次,数据填入表2.2.2。
千分尺零值偏移ε仪=
表2.2.2 钢丝直径

2.放光杠杆镜架于弹性模量测定仪的平台和圆柱夹具上,细调望远镜,读出望远镜准线在标尺上的初始位置 并记录在表2.2.3。
并记录在表2.2.3。
3.在砝码盘上逐次给钢丝增加 砝码,同时从望远镜中读记钢丝伸长后在标尺上对应的读数
砝码,同时从望远镜中读记钢丝伸长后在标尺上对应的读数 记入表2.2.3,并观察是否呈线性变化。砝码加到
记入表2.2.3,并观察是否呈线性变化。砝码加到 为止(
为止( =1、2、3、…9),然后每次减去1个砝码,在表2.2.3中记录相应的读数,直到所加的9个砝码全部减去为止。
=1、2、3、…9),然后每次减去1个砝码,在表2.2.3中记录相应的读数,直到所加的9个砝码全部减去为止。
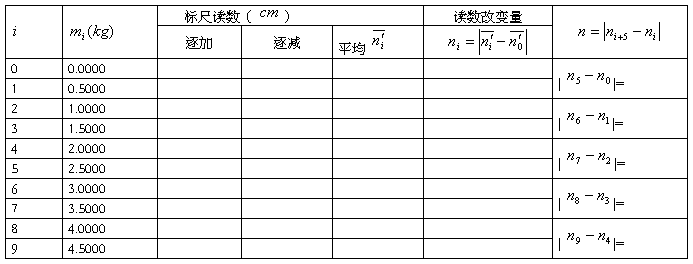
表2.2.3 标尺读数改变n与负荷m关系的测量记录
4.用卷尺测量钢丝长L;取下光杠杆,用卷尺测出平台沟槽到标尺的距离D;卸下钢尺测量光杠杆短臂R。测R时,可用脚T3和底边T1T2在铺平的纸上压出记印,量出T3到T1T2的距离作为R的测量值。L、D、R只测1次,数据填入表2.2.4。
表2.2.4 L、D、R的数值

二、数据处理
1.按多次测量求出 ,并估算的不确定度。
,并估算的不确定度。
2.按逐差法求出 ,并估算的不确定度。表2.2.3第七列是逐差法对数据的处理,相当于用
,并估算的不确定度。表2.2.3第七列是逐差法对数据的处理,相当于用 砝码在相同条件下,重复测量了5次所得的测量值。逐差法是先将数据组按自变量等量增加的次序排列后(如表2.2.3第6列=0~9),分为前后相等的两组(即分为=0~4和=5~9两组),然后用前后两组对应序号的测量值求差,即表2.2.3中第七列
砝码在相同条件下,重复测量了5次所得的测量值。逐差法是先将数据组按自变量等量增加的次序排列后(如表2.2.3第6列=0~9),分为前后相等的两组(即分为=0~4和=5~9两组),然后用前后两组对应序号的测量值求差,即表2.2.3中第七列 。这种处理方法,充分利用了每一个测量数据,可视为是在砝码作用下,对钢丝伸长量做的5次重复测量。故求出5次逐差数后,按处理多次测量数据的方法,求最佳值等来处理即可。
。这种处理方法,充分利用了每一个测量数据,可视为是在砝码作用下,对钢丝伸长量做的5次重复测量。故求出5次逐差数后,按处理多次测量数据的方法,求最佳值等来处理即可。
3.把已知有关数据代入(2.2.6)式求出钢丝的弹性模量。把有关数据代入(2.2.7)式求出 和
和 ,表示实验结果。
,表示实验结果。
4.用表2.2.3第二列和第六列的数据,以 为纵轴,为横轴,作图线以验证虎克定律。
为纵轴,为横轴,作图线以验证虎克定律。
注意事项
用逐差法处理数据时应注意
1.测量关系式应属 线性函数形式;
线性函数形式;
2.自变量 视为准确量(相对于
视为准确量(相对于 ),且为等间隔变化。
),且为等间隔变化。
-
拉伸法测弹性模量 实验报告
大连理工大学大学物理实验报告院系材料学院专业材料物理班级0705姓名童凌炜学号20xx67025实验台号实验时间20xx年11月1…
-
拉伸法测弹性模量实验报告
拉伸法测弹性模量实验报告一实验原理实验结果指出在弹性形变范围内正应力和线应变成正比即FLESL于是弹性模量EFSLL在本实验中E4…
-
用拉伸法测金属丝的杨氏弹性模量实验报告示范
实验报告示范1实验名称用拉伸法测金属丝的杨氏弹性模量一实验目的学习用拉伸法测定钢丝的杨氏模量掌握光杠杆法测量微小变化量的原理学习用…
-
静态拉伸法测弹性模量实验报告
静态拉伸法测弹性模量实验报告弹性模量亦称杨氏模量是固体材料的一个重要物理参数它标志着材料对于拉伸或压缩形变的抵抗能力作为测定金属材…
-
拉伸法测弹性模量实验报告评分标准
拉伸法测弹性模量实验报告评分标准一实验预习20分学生进入实验室前应预习实验并书写实验预习报告预习报告应包括实验目的实验原理实验仪器…
-
校级创新项目个人总结
在繁忙的大三学习中,我能够在创新实验中坚持到了最后,我感到有一种成就感。通过参加此次华北水利水电大学校级大学生创新项目,让我获益匪…
-
个 人 工 作 总 结(史志办)
个人工作总结**县委史志办**20xx年x月经**省公务员招录考试,我荣幸的成为**县史志办的一名公务员。一年来在单位领导及同事的…
-
办公室个人工作总结
一年来,我在领导的帮助指导下,同事们的关心、支持和帮助下,认真履行工作职责,努力学习,勤奋工作,不断进取,较好地完成了各项工作任务…
-
乡镇办公室20xx年度个人工作总结
20xx年度个人工作总结(20xx年x月x日)今年以来,在镇党委、政府的正确领导下,在办公室同事们的悉心帮助下,我以把自己培养成为…
-
2年度办公室人员个人工作总结
20xx年度公司办公室人员个人工作总结作者:佚名来源:不详发布时间:20xx-12-1223:39:04发布人:lsychj123…