陈中原+对弹性模量测量的深入研究

学 院:宇航学院
第一作者:陈中原
学 号:
第二作者:
学 号:
完成时间:20##年11月13日
目录
摘要... 3
Abstract. 3
一、 实验原理... 4
二、 实验仪器... 7
三、 实验的主要步骤... 7
3.1调整测量系统... 7
3.1.1目测粗调及其创新... 7
3.1.2调焦找尺... 8
3.1.3细调光路水平及其创新... 8
3.2测量数据... 9
3.2.1测量钢丝形变及其创新... 9
3.2.2测量L、H、D、b. 10
四、 数据记录... 11
五、 数据处理... 12
5.1利用逐差法计算弹性模量... 12
5.1.1望远镜读数改变量... 12
5.1.2不确定度的计算... 12
六、 误差分析... 14
6.1不确定度的定量分析... 14
6.2造成误差的原因分析... 15
6.2.1金属丝存在弯曲... 15
6.2.2下卡头与平台间的摩擦... 15
6.2.3弹性滞后效应... 17
6.2.4范性形变... 17
6.2.5仪器支架受力伸缩... 18
七、 光杠杆的其他应用... 18
八、 参考文献... 19
摘要
本文以“静态拉伸法测金属丝弹性模量”为主要内容,讨论了在静态拉伸法测金属丝杨氏弹性模量实验中影响实验结果的可能因素及减小相应误差的方法。用改进后的方法进行实验,可获得更加精确的结果。对实验操作方法及仪器设计的改进提出了建议。
关键词:杨氏弹性模量;静态拉伸法;误差分析;创新改进建议。
Abstract
This article by "static stretching method measuring wire elastic modulus" as the main content, and discussed the static tensile method measuring wire young's modulus of elasticity experiments affect the experimental results of the possible factors and reduce the corresponding error method, the improved method of experiment, we can obtain a more precise results. The experimental operation method and instrument design improvement Suggestions were put forward.
Key words: Young's modulus of elasticity;
Static stretching method;
Error analysis;
Innovation suggestions for improvement.
一、 实验原理
杨氏弹性模量是描述材料抵抗弹性形变能力的物理量,本实验用静态拉伸法测定一种金属丝的杨氏弹性模量。静态拉伸法通过测量对试样直接加力下的形变来测量试样的杨氏弹性模量,原理直观、设备简单,测量方法、仪器调整、数据处理等方面都具有代表性,是力学基础实验之一。光杠杆是一种利用光学放大方法测量微小位移的装置。其方法在近代精密仪器中常有应用。
 例如在原子力显微镜(AFM)的系统中,就是利用光杠杆的原理使用微小悬臂(cantilever)来感测针尖与样品之间的交互作用,这作用力会使悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,并把此时的信号传给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式呈现出来。
例如在原子力显微镜(AFM)的系统中,就是利用光杠杆的原理使用微小悬臂(cantilever)来感测针尖与样品之间的交互作用,这作用力会使悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,并把此时的信号传给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式呈现出来。
一条各向同性的金属棒(丝),原长为L,截面积为A,在外力F作用下伸长 。当呈平衡状态时,若忽略金属棒本身的重力,则棒中任意截面上,内部的恢复力必与外力相等。在比例极限内,根据胡克定律,
。当呈平衡状态时,若忽略金属棒本身的重力,则棒中任意截面上,内部的恢复力必与外力相等。在比例极限内,根据胡克定律, 。
。 称为该金属丝的弹性模量,又称为杨氏模量。弹性模量E与外力F,物体的长度L以及截面积A的大小均无关,只取决于棒的材料性质,是表征材料力学性能的一个物理量。
称为该金属丝的弹性模量,又称为杨氏模量。弹性模量E与外力F,物体的长度L以及截面积A的大小均无关,只取决于棒的材料性质,是表征材料力学性能的一个物理量。
若金属棒为圆柱形,直径为D,在金属棒(丝)下端悬一重物产生的拉力为F,则
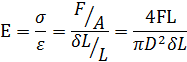
根据此式,测出等式右边各项,就可算出该金属丝的弹性模量。测量的难点在于,在弹性限度内,F=mg不可能很大,相应的很小,用一般的工具不易测出,本实验采用光杠杆法。
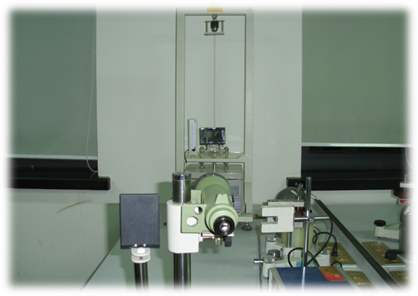
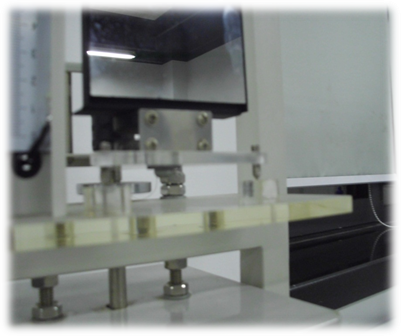
光杠杆有一个直立的平面镜装在倾角调节架上,它与望远镜、标尺、二次反射镜组成光杠杆测量系统。
实验时,将光杠杆两个前足尖放在弹性模量测定仪的固定平台上,后足尖放在待测金属丝的测量端面上。当金属丝受力后,产生微小伸长,后足尖便随测量端面一起作微小移动,并使光杠杆绕前足尖转动一微小角度,从而带动光杆杆反射镜转动相应的微小角度,这样标尺的像在光杠杆反射镜和二次反射镜之间反射,便把这一微小角位移放大成较大的线位移。这就是光杠杆产生光放大的基本原理。
开始时光杠杆反射镜与标尺在同一平面,在望远镜上读到的标尺读数为 ;当光杠杆反射镜的后足尖下降时,产生一个微小偏转角
;当光杠杆反射镜的后足尖下降时,产生一个微小偏转角 ,在望远镜上读到的标尺读数为
,在望远镜上读到的标尺读数为 ,则放大后钢丝的伸长量
,则放大后钢丝的伸长量 。
。
那么, ,式中,b为光杠杆前后足尖的距离,称为光杠杆常数。
,式中,b为光杠杆前后足尖的距离,称为光杠杆常数。
由于经光杠杆反射而进入望远镜的光线方向不变,故当平面镜旋转一角度后,入射到光杠杆的光线的方向就要偏转4,因甚小, 也甚小,故可认为平面镜到标尺的距离H
也甚小,故可认为平面镜到标尺的距离H ,并有
,并有
 ,
, 
所以,
 ,
, 
 称为光杠杆的“放大率”。只要从望远镜中测的标尺刻线移过的距离
称为光杠杆的“放大率”。只要从望远镜中测的标尺刻线移过的距离 ,便可算出钢丝的相应伸长
,便可算出钢丝的相应伸长 。
。
所以,

本实验的重点也就是的测量过程,如何减小实验中的误差显得至关重要。
二、 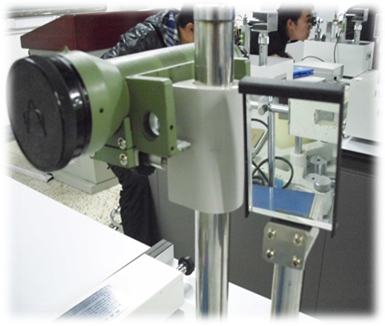 实验仪器
实验仪器
 弹性模量测定仪(包括:细钢丝、光杠杆、望远镜、标尺及拉力测量装置);钢卷尺、游标卡尺和螺旋测微计。
弹性模量测定仪(包括:细钢丝、光杠杆、望远镜、标尺及拉力测量装置);钢卷尺、游标卡尺和螺旋测微计。
三、 实验的主要步骤
3.1调整测量系统
这是本实验的重点,对望远镜的调整涉及到本次试验所带来的误差,对实验结果有着重要影响。调整后的系统应满足光线沿水平面传播的条件,即与望远镜等高处的标尺刻度经两个平面镜反射后进入望远镜视野。为此,可通过以下步骤调节:
3.1.1目测粗调及其创新
首先调整望远镜,使其与光杠杆等高,然后左右平移望远镜与二次反射镜,直至凭目测从望远镜上方观察到光杠杆反射镜中出现二次反射的像,在适当转动二次反射镜至出现标尺的像。
创新点:在这个步骤中,当望远镜未出现标尺像时,可将手指在物镜前晃动,当感觉看到手指的像时,轻轻左右移动望远镜,便可看到标尺的像,这一步也就基本完成了。
3.1.2调焦找尺
首先调节望远镜目镜旋轮,使“十”字叉丝清晰成像(目镜调焦);然后调节望远镜物镜焦距,至标尺像与“十”字叉丝无视差。
调节过程中,若标尺像上下清晰度不一致,则可适当调节望远镜俯仰螺钉。
3.1.3细调光路水平及其创新
观察望远镜水平叉丝所对应的标尺读数与光杠杆在实际位置上的是否一致,若明显不同,则说明入射光线与反射光线未沿水平面传播,可适当调节二次反射镜的俯仰,直到望远镜读出的数恰为其实际位置为止。
创新点:如何保证望远镜水平叉丝的读数与光杠杆在标尺位置上的实际位置读数一致,是我在做试验中的一个很大的困惑。为此,我觉得此时可以在目镜镜筒前放置一个激光源,当激光穿过物镜打在标尺上时,读出标尺读数,即为光杠杆在标尺的实际位置,这时调节二次反射镜俯仰,使望远镜水平叉丝的读数与其一致,则入射光线与反射光线沿水平面传播。
3.2测量数据
3.2.1测量钢丝形变及其创新
本实验的关键在于钢丝型变量的测量,为了能够尽量减小误差,测量过程中可使用以下方法:
1、 在加力之前,钢丝未拉直,为了避免这种情况带来的误差,在实验之前可先预加10Kg的拉力,将钢丝拉直,然后逐次改变钢丝拉力,测量望远镜水平叉丝对应的标尺读数;
2、 由于钢丝受力后并不是伸长到应有数值,外力撤消后也不能立即恢复原状,这也就是所谓的弹性滞后效应。为了减小此效应引起的误差,可在增加拉力过程和减小拉力过程中各测一次对应拉力下标尺的读数,然后取两次结果的平均值。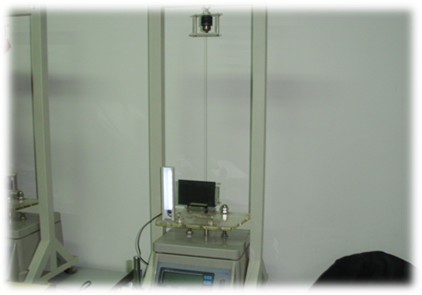
光杠杆
3、 创新点:本次试验中,加力的方式为水压加力,故所测数据更加精确。但在读数过程中,水压装置的读数并不是很稳定。为此,在加力过程中,最好不要让水压盒晃动,并且在旋转螺母时,最好慢慢匀速地旋转,这样示数会很快稳定下来。由于水压力的作用,家里后螺母会反弹回来一些,因此在加力时最好将拉力调到比预定值略大一些,这样在示数一般会稳定在预定值左右,稍稍微调即可。加力最大后,读出望远镜的读数后,可将水压装置压力归零,在加力到最大读出示数,这样可减小误差。
3.2.2测量L、H、D、b
B较难测量,已由实验老师给出。
本次试验中, L、H的测量带来的不确定度并不是主要误差来源(由后面的推导可知),故可用卷尺来测量,测量一次即可。
测量过程中,可以两个人合作,保证卷尺水平或竖直,以减小误差。
D是本实验的主要误差来源之一(由后面的分析可知),测量过程中最好在钢丝的上、中、下的多个部位测量,最后取平均值来减小误差。
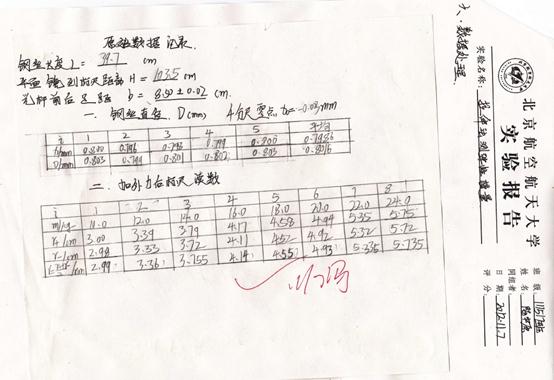
四、 数据记录
本次试验所测得的数据如下:
1、钢丝长度L=39.7 cm(测量时由于钢丝上下端装有紧固夹头,米尺较难测准,误差限可取0.3cm);
cm(测量时由于钢丝上下端装有紧固夹头,米尺较难测准,误差限可取0.3cm);
2、平面镜到标尺的距离H=103.5 cm(由于不能保证米尺水平、不弯曲和两端对准,取其误差限为0.5cm);
cm(由于不能保证米尺水平、不弯曲和两端对准,取其误差限为0.5cm);
3、光杠杆前后足间距b=8.50 cm(在卡尺测量时,不能保证是垂直距离,故取误差限为0.02cm);
cm(在卡尺测量时,不能保证是垂直距离,故取误差限为0.02cm);
表 1 钢丝直径 D
千分尺零点: =-0.003mm
=-0.003mm

表 2 望远镜水平叉丝读数r
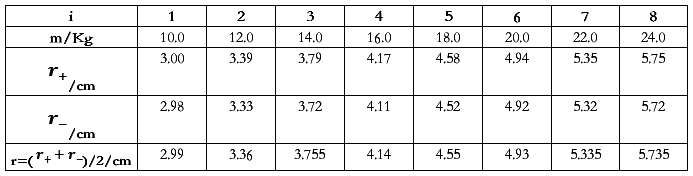
(为避免增大误差,平均值多保留了一位。)
五、 数据处理
5.1利用逐差法计算弹性模量
5.1.1望远镜读数改变量

所以:

(北京地区g=9.8012m/ )
)
5.1.2不确定度的计算
由于L、H、b只测量一次,因此不确定度只有B类分量根据测量过程的实际情况,如尺弯曲、不水平,数值读不准等,估计出它们的误差限为



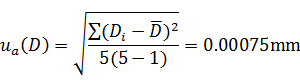
D的不确定度:


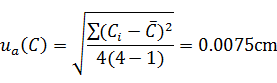
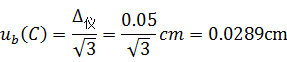
C的不确定度:

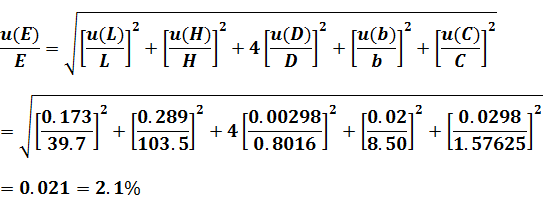
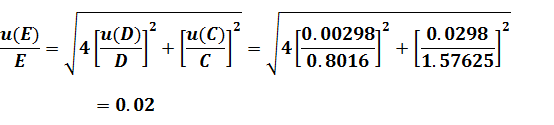
计算E的不确定度:
由E的计算公式得出E的相对不确定度计算公式为:
u(E)=E =1.906
=1.906
5.1.3测量结果的最终表述
E
六、 误差分析
6.1不确定度的定量分析
由实验数据可以得出:
 4
4
从中可以看出,标尺读数与钢丝直径D的测量带来的误差对本次试验的误差贡献最大。若忽略其他误差,则:
与上述结果基本一致。
6.2造成误差的原因分析
6.2.1金属丝存在弯曲
首先加10Kg的力预拉伸金属丝,可能不足以完全消除金属丝的弯曲。余下的弯曲,会在继续加载的过程中逐渐消除,在减小载荷的过程中又再次出现,这些变化加人到了金属丝的轴向形变中.最直接的反映是 ,
, 的大小一定程度上反映了预拉伸后金属丝的弯曲度大小.这会使测得的偏大,从而使E值偏大。为尽量消除金属丝弯曲引起的偏差,可适当提高预加的拉力。
的大小一定程度上反映了预拉伸后金属丝的弯曲度大小.这会使测得的偏大,从而使E值偏大。为尽量消除金属丝弯曲引起的偏差,可适当提高预加的拉力。
预加力后的金属丝仍存在弯曲
6.2.2下卡头与平台间的摩擦
杨氏弹性模量仪的下卡头与平台中圆孔内壁之间的间隙很小。如果杨氏弹性模量仪立柱不竖直,下卡头受平台中圆孔限制,与上卡头的中心轴线不在同一竖直线上,上、下卡头之间的金属丝不竖直,下 卡头与圆孔内壁接触发生摩擦。增加珐码时,下卡头运动方向向下,摩擦力向上,金属丝所受的实际拉力小于名义上的载荷;减珐码时,下卡头运动方向向上,摩擦力方
卡头与圆孔内壁接触发生摩擦。增加珐码时,下卡头运动方向向下,摩擦力向上,金属丝所受的实际拉力小于名义上的载荷;减珐码时,下卡头运动方向向上,摩擦力方 向向下金属丝所受的实际拉力大于名义上的载荷。导致了祛码数相同时,金属丝在减载时的长度大于加载时的长度,减载时的读数总是大于加载时的读数。数据处理时,对加载和减载时的数据取平均,可以减小甚至消除摩擦因素对结果的影响,从而提高结果的准确度,但精密度不高。
向向下金属丝所受的实际拉力大于名义上的载荷。导致了祛码数相同时,金属丝在减载时的长度大于加载时的长度,减载时的读数总是大于加载时的读数。数据处理时,对加载和减载时的数据取平均,可以减小甚至消除摩擦因素对结果的影响,从而提高结果的准确度,但精密度不高。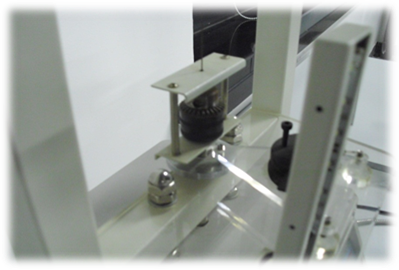
下卡头
6.2.3弹性滞后效应
 试样受力并不立即伸长到应有数值,反之,撤去后也不立即恢复原状,形变量需一段恢复时间。实际测量是在加(或减)力后,待显示屏示数稳定就记录读数,这样测出的读数不能完全反应金属丝的形变量。为此,在做实验的时候,我们要先记录加力时望远镜的示数,在记录减力时望远镜的示数,然后取平均值,以减小误差。
试样受力并不立即伸长到应有数值,反之,撤去后也不立即恢复原状,形变量需一段恢复时间。实际测量是在加(或减)力后,待显示屏示数稳定就记录读数,这样测出的读数不能完全反应金属丝的形变量。为此,在做实验的时候,我们要先记录加力时望远镜的示数,在记录减力时望远镜的示数,然后取平均值,以减小误差。

6.2.4范性形变
实际上100N的力远不足以导致实验所用的金属丝产生范性形变,但加祛码时动作太猛,瞬时的冲力可能超过其弹性极限,造成金属丝的一个不可逆的伸长,产生“增重时形变大”的假象,使得F很大并反映在“应力——应变”曲线呈现明显的非线性,如果出现此种情况则表明实验是不成功的。所以我们在实验中时应保证动作平稳,也就保证了形变在弹性限度内。
6.2.5仪器支架受力伸缩
两根支柱受力发生的形变会附加在金属丝的轴向形变中通过光杠杆体现出来。加载时支柱变短,所以测得的形变比金属丝形变大。加载越重,附加的形变越大。设支架杨氏弹性模量为 ,长度取为0. 7m,内、外径分别为0.0212m和0.0266m,则在F=100N时,其形变
,长度取为0. 7m,内、外径分别为0.0212m和0.0266m,则在F=100N时,其形变 ,远低于金属丝的总形变(2.5mm左右),故影响是极小的。
,远低于金属丝的总形变(2.5mm左右),故影响是极小的。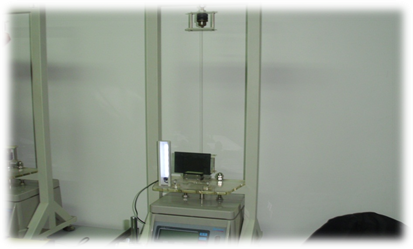
七、 光杠杆的其他应用
光杠杆法是一种利用光学放大方法测量微小长度(或物体微小位移)的装置。它采用光学机制以光线来代替机械杠杆的长臂而实现间接放大测量。光杠杆可以做得很轻,对微小伸长或微小转角的反应很灵敏,测量也很精确,在精密仪器中常有应用,例如灵敏电流计,通过光杠杆的放大可测量 A的电流.原子力显微镜(AFM)的主要组成部分之一位置检测部分即是一个极精细的光杠杆,当针尖与样品之间有了交互作用之后,会使得悬臂摆动,所以当激光照射在悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理.系统作适当的调整,最后再将样品的表面特性以影像的方式呈现出来。光杠杆还有许多应用,在这里就不一一赘述了。
A的电流.原子力显微镜(AFM)的主要组成部分之一位置检测部分即是一个极精细的光杠杆,当针尖与样品之间有了交互作用之后,会使得悬臂摆动,所以当激光照射在悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理.系统作适当的调整,最后再将样品的表面特性以影像的方式呈现出来。光杠杆还有许多应用,在这里就不一一赘述了。
八、 参考文献
[1]李朝荣等.《基础物理实验(修订版)》.北京航空航天大学出版社.20##年9月;
[2]徐芝纶.弹性力学(上)[M].北京:高等教育出版社,1978;
[3]赵凯华,罗蔚茵.新概念物理教程力学「M].北京:高等教育出版社,1995。
-
拉伸法测弹性模量 实验报告
大连理工大学大学物理实验报告院系材料学院专业材料物理班级0705姓名童凌炜学号20xx67025实验台号实验时间20xx年11月1…
-
用拉伸法测金属丝的杨氏弹性模量实验报告示范
实验报告示范1实验名称用拉伸法测金属丝的杨氏弹性模量一实验目的学习用拉伸法测定钢丝的杨氏模量掌握光杠杆法测量微小变化量的原理学习用…
-
金属材料杨氏模量的测定实验报告
浙江中医药大学学生物理实验报告实验名称金属材料杨氏模量的测定学院信息技术学院专业医学信息工程班级一班报告人学号同组人学号同组人学号…
-
南昌大学物理实验报告金属丝弹性模量的测定
南昌大学物理实验报告学生姓名学号专业班级班级编号试验时间时分第周星期座位号教师编号成绩杨氏模量的测定实验目的1掌握用光杠杆测量微小…
-
弹性模量和泊松比的测定实验
二弹性模量和泊松比的测定实验弹性模量和泊松比的测定实验大纲1通过材料弹性模量和泊松比的测定实验使学生掌握测定材料变形的基本方法学会…
-
三基培训总结
合川区合州医院20xx年三基培训总结20xx年以来,各科在医院领导的正确带领下,根据医政部的三基培训计划,对医院的全体医护人员进行…
-
高级钳工个人工作总结
20xx年x月——20xx年x月,本人在某公司就职。首先在金工车间实习,接着转工装担任设计科实习,然后转车间实习。随后在模具车间任…
-
119消防总结
娄寨中学“119消防日”宣传活动的活动总结今年x月x日是全国第20个消防宣传日,也是我省第十六个法定消防日,宣传主题是“全民消防,…
-
钳工教学工作总结.doc
钳工实训与教学工作总结本学期我任教于一年级机械班的钳工实训,通过3个多月的钳工理论教学和钳工的实训,学生对钳工的基本知识有了一定的…
-
20xx年119消防日活动总结
20xx年“11.9”消防日活动总结11月x日至9日,公司按照上级的要求和相关文件的精神,结合公司实际,开展了以“提高四个能力建设…