51单片机实验报告
硬件实验:
实验一:定时器中断实验
实验内容:fosc=11.0592MHz,T0方式2产生定时中断实现秒表功能:数码管后两
位显示10ms;前两位显示秒数;K1/K2/K3键分别启动/停止/清零,按键操作不
分先后
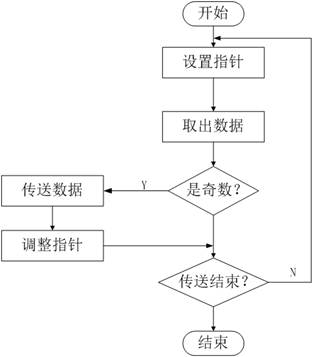
实验程序流程图:
主程序流程图: 中断程序流程图:
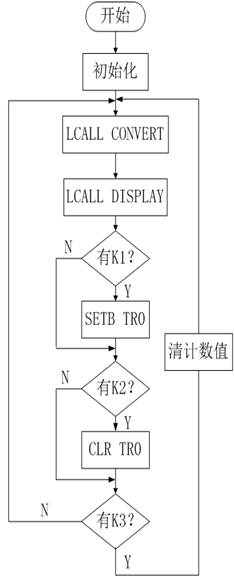
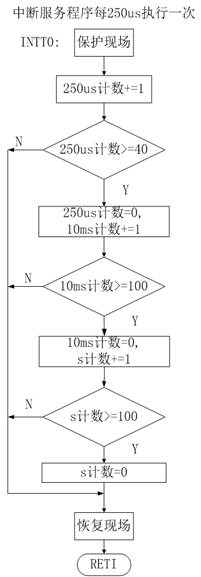
实验程序:
ORG 0000H
LJMP MAIN
ORG 000BH
LJMP INTT0
ORG 0100H
MAIN: MOV SP,#70H
CALL INI_ALL
LOOP: CALL DISPLAY
MOV DPTR,#8000H
MOVX A,@DPTR
JB ACC.7,NEXT
SETB TR0
NEXT: JB ACC.6,NEXT1
CLR TR0
NEXT1: JB ACC.5,LOOP
MOV R7,#0H
MOV R6,#0H
MOV R5,#0H
LJMP LOOP
/*INTT0*/
INTT0: PUSH PSW
PUSH ACC
INC R5
CJNE R5,#40,CMP1
CMP1: JC GOON
MOV R5,#0H
INC R6
CJNE R6,#100,CMP2
CMP2: JC GOON
MOV R6,#0H
INC R7
CJNE R7,#100,CMP3
CMP3: JC GOON
MOV R7,#0H
GOON: POP ACC
POP PSW
RETI
/*INIALL*/
INI_ALL:MOV R7,#0H
MOV R6,#0H
MOV R5,#0H
MOV IE,#82H
MOV TMOD,#02H
MOV TH0,#25
MOV TL0,#25
RET
/*DISPLAY*/
DISPLAY:MOV DPTR,#TABLE
MOV A,R7
MOV B,#10
DIV AB
MOVC A,@A+DPTR
MOV 33H,A
MOV A,B
MOVC A,@A+DPTR
MOV 32H,A
/**/
MOV A,R6
MOV B,#10
DIV AB
MOVC A,@A+DPTR
MOV 31H,A
MOV A,B
MOVC A,@A+DPTR
MOV 30H,A
/**/
MOV DPTR,#8000H
MOV A,33H
MOVX @DPTR,A
MOV DPTR,#8100H
MOV A,32H
MOVX @DPTR,A
MOV DPTR,#8200H
MOV A,31H
MOVX @DPTR,A
MOV DPTR,#8300H
MOV A,30H
MOVX @DPTR,A
RET
TABLE: DB 88H,0AFH,0C4H,86H,0A3H,92H,90H,8FH,80H,82H
END
实验结果:数码管后两位显示ms计数,前两位显示s计数,按K1键启动计数,K2键停止计数,K3键清零。可实现秒表功能。
实验二:驱动蜂鸣器实验
实验内容:使P3.5端口输出周期为1S的方波信号。并通过三极管驱动一个直流小喇叭,使其发出断续的鸣响。
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV SP,#70H
START: CPL P3.5
LCALL DELAY
LJMP START
DELAY: MOV R7,#200
Y: MOV R6,#100
X: NOP
DJNZ R6,X
DJNZ R7,Y
RET
END
实验结果:蜂鸣器发出声响。
实验三:显示管增一显示
实验内容:编写程序,使数码管从0000自增一加至9999,然后再自动清零循环。
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV 30H,#0H
MOV 31H,#0H
MOV 32H,#0H
MOV 33H,#0H
MOV R0,#1
START: LCALL DELAY
LCALL CONVERT
LCALL DISPLAY
INC R0
CJNE R0,#255,XX
LJMP START
XX: JC START
JNC MAIN
CONVERT:MOV A,R0
MOV B,#10
DIV AB
MOV 30H,B
MOV B,#10
DIV AB
MOV 31H,B
MOV 32H,A
RET
DISPLAY:MOV A,30H
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV DPTR,#8300H
MOVX @DPTR,A
MOV A,31H
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV DPTR,#8200H
MOVX @DPTR,A
MOV A,32H
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV DPTR,#8100H
MOVX @DPTR,A
MOV A,33H
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV DPTR,#8000H
MOVX @DPTR,A
RET
DELAY: MOV R7,#100
Y: MOV R6,#50
X: NOP
DJNZ R6,X
DJNZ R7,Y
RET
TABLE: DB 88H,0AFH,0C4H,86H,0A3H,92H,90H,8FH,80H,82H
END
实验结果:八段数码显示管如题目要求所示自增一显示。
l 软件实验
实验一:数据传送实验
实验内容:编写程序,将内部RAM中的30H-5FH中的数据设置为55H;
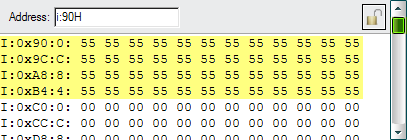
(1)将其中内容传送到90H开始的内部RAM中去。
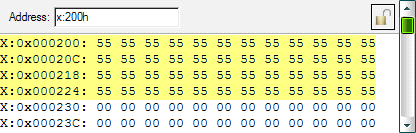
(2)将其中内容传送到200H开始的外部RAM中去。
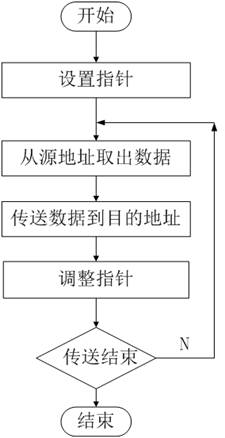
实验程序流程图:
实验程序:ORG 0000H
LJMP MAIN
ORG 0100H
MAIN: MOV SP,#70H
MOV R0,#30H
MOV R7,#30H
MOV A,#55H
LOOP1: MOV @R0,A
INC R0
DJNZ R7,LOOP1
MOV R0,#30H
MOV R7,#30H
MOV R1,#90H
LOOP2: MOV A,@R0
MOV @R1,A
INC R0
INC R1
DJNZ R7,LOOP2
WAIT: SJMP WAIT /*SJMP $*/
END
实验结果:
内部RAM,30H-5FH单元内都为55H。
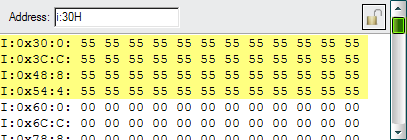
内部RAM,90H开始的单元内都为55H。
外部RAM,200H开始的单元内都为55H
实验二:数据分类与校验实验
实验内容:编写程序,将内部RAM中30H-5FH中的数据设置为1-48;并将其中奇数传送到90H开始的内部RAM中;将30H-5FH中的数据设置按照奇校验设置最高位。
实验程序流程图:
实验程序:
ORG 0000H
LJMP MAIN
ORG 0100H
MAIN: MOV SP,#70H
MOV R0,#30H
MOV R7,#30H
MOV A,#1
LOOP1: MOV @R0,A
INC R0
INC A
DJNZ R7,LOOP1
MOV R0,#30H
MOV R7,#30H
MOV R1,#90H
LOOP2: MOV A,@R0
INC R0
JB 0E0H,TRANS
JMP NTRANS
TRANS: MOV @R1,A
INC R1
NTRANS:DJNZ R7,LOOP2
END
实验结果:
内部RAM中30H-5FH中的数据为1-48;其中奇数传送到90H单元。
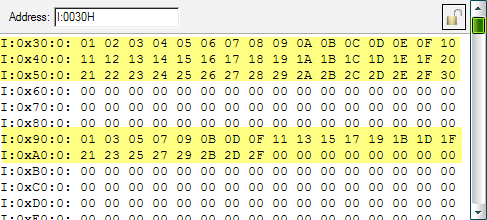
30H-5FH中的数据设置按照奇校验设置最高位送到90H单元内。
程序段如下:
//奇校验设置最高位
MOV R0,#30H
MOV R7,#30H
MOV R1,#90H
LOOP3: MOV A,@R0
INC R0
JNB P,TRANS2
JMP NTRANS2
TRANS2:SETB 0E7H
MOV @R1,A
INC R1
NTRANS2:DJNZ R7,LOOP3

实验三:简单算术运算
实验内容:编写程序,计算1-100的累加和。结果存放于内部RAM的30H、31H中,低字节在前。
实验程序流程图:
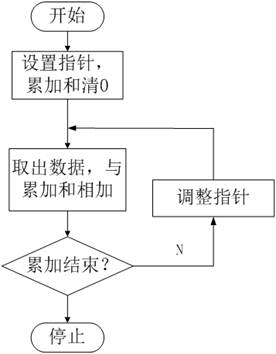
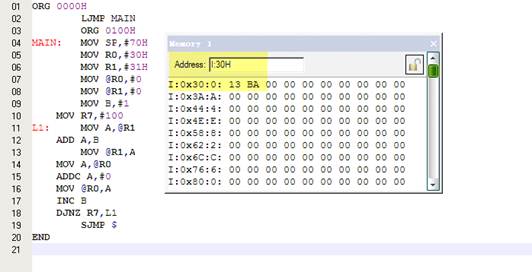
实验程序:
ORG 0000H
LJMP MAIN
ORG 0100H
MAIN: MOV SP,#70H
MOV R0,#30H
MOV R1,#31H
MOV @R0,#0
MOV @R1,#0
MOV B,#1
MOV R7,#100
L1: MOV A,@R1
ADD A,B
MOV @R1,A
MOV A,@R0
ADDC A,#0
MOV @R0,A
INC B
DJNZ R7,L1
END
实验结果:
(30H)=13H,(31H)=0BAH,即结果为13BAH=5050D。
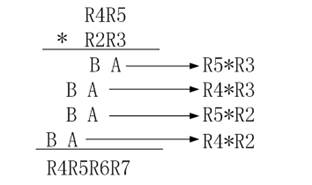
实验四:定点数算术运算实验
实验内容:编写2字节乘2字节子程序。乘数位于R2R3,被乘数位于R4R5。结果存放于R4R5R6R7内。
实验说明:
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV R2,#04H
MOV R3,#03H
MOV R4,#02H
MOV R5,#01H
MOV R6,#0H
MOV R7,#0H
MOV R0,#16D/*JISHU*/
CLR C
LOOP: MOV A,R5
RLC A
MOV R5,A
MOV A,R4
RLC A
MOV R4,A
MOV A,R7
RLC A
MOV R7,A
MOV A,R6
RLC A
MOV R6,A
MOV 26H,R6
MOV 27H,R7
MOV A,R2
CJNE A,26H,NEXT1
NEXT1: JNC NEXT2
MOV A,R3
CJNE A,27H,NEXT3
NEXT3: JNC NEXT2
CLR C
MOV A,R7
SUBB A,R3
MOV R7,A
MOV A,R6
SUBB A,R2
MOV R2,A
SETB C
NEXT2: DJNZ R0,LOOP
WAIT: SJMP WAIT
END
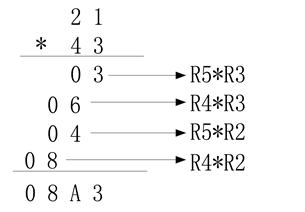
实验结果:当(R4R5)=21H,(R2R3)=43H时,运算结果为(R4R5R6R7)=08A3H。

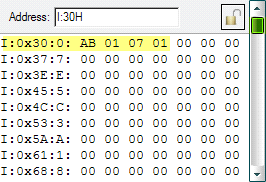
实验五:数制转换实验一
实验内容:编写程序,将内部RAM中30H中的二进制数据转换为十进制数据并存放在31H、32H、33H中。
实验程序流程图:

实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV 30H,#0ABH
MOV A,30H
MOV B,#100D
DIV AB
MOV 31H,A
MOV A,B
MOV B,#10D
DIV AB
MOV 32H,A
MOV 33H,B
WAIT: SJMP WAIT
END
实验结果:假设(30H)=0ABH,则(31H、32H、33H)=(01、07、01)。
实验六:数制转换实验二
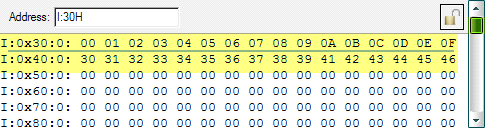
实验内容:编写程序,将内部RAM中30H-3FH中的16进制数据(0-F)转换为ASCII码并存放在40H-4FH中。
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV R0,#30H
MOV A,#0H
MOV R2,#16D
LOOP1: MOV @R0,A
INC A
INC R0
DJNZ R2,LOOP1
MOV R0,#30H
MOV R1,#40H
MOV R2,#16D
LOOP: MOV A,@R0
INC R0
CLR C
SUBB A,#10D
JC SMALL
ADD A,#7
SMALL: ADD A,#3AH
MOV @R1,A
INC R1
DJNZ R2,LOOP
WAIT: SJMP WAIT
END
实验结果:
实验七:数据统计实验一
实验内容:编写程序,首先将内部RAM中30H-7FH中的数据设置为50H-9FH。然后编写程序统计该区域内大于80H的个数,结果存放在寄存器B内。
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV R0,#30H
MOV A,#50H
MOV R2,#80D
LOOP1: MOV @R0,A
INC A
INC R0
DJNZ R2,LOOP1
MOV R0,#30H
MOV R1,#0H
MOV R2,#80D
LOOP: CJNE @R0,#81H,NEXT
NEXT: JC NEXT1
INC R1
NEXT1: INC R0
DJNZ R2,LOOP
MOV B,R1
WAIT: SJMP WAIT
END
实验结果:首先将30H-7FH中的数据设置为50H-9FH
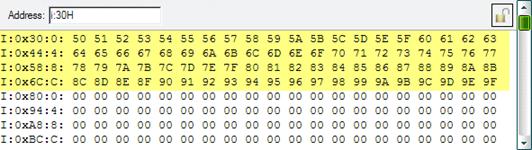
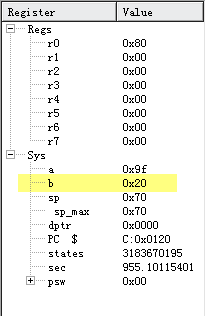
统计该区域内大于80H的个数,结果存放在寄存器B内,(B)=20H。
实验八:数据统计实验二
实验内容:编写程序,首先将内部RAM中30H-7FH中的数据设置为50H-9FH;然后统计该区域内的奇数个数,存放在R6中,正数个数放在R7。
实验程序:
ORG 0H
LJMP MAIN
ORG 0100H
MAIN: MOV R0,#30H
MOV A,#50H
MOV R2,#80D
LOOP1: MOV @R0,A
INC A
INC R0
DJNZ R2,LOOP1
MOV R0,#30H
MOV R6,#0H/*JI*/
MOV R7,#0H/*ZHENG*/
MOV R2,#80D
LOOP: MOV A,@R0
JNB ACC.0,NEXT1
INC R6
NEXT1: JB ACC.7,NEXT2
INC R7
NEXT2: INC R0
DJNZ R2,LOOP
WAIT: SJMP WAIT
END
实验结果:
首先将30H-7FH中的数据设置为50H-9FH

统计的奇数个数存放在R6中,(R6)=28H
第二篇:基于51单片机的数据信号采集实验报告
摘 要
本文完成了基于51系列单片机的数据采集系统的硬件研发及相应的软件设计,对系统的主要性能指标进行了测试研究。
系统的硬件研究内容主要包括:单片机型号、通讯方式、系统电源的选择,设计系统原理图、PCB板图,制作PCB板。选择C8051F350单片机作为系统控制核心,芯片自带A/D转换模块,有增益放大功能。通讯方式选择RS-485通讯,可以有较远的传输距离,又能保证高的通讯速率。系统电源选用5V直流电源,局部电路采用稳压芯片转换供电。系统原理图和PCB板图的设计是在Altium Designer中完成。原理图设计时要保证电源信号的稳定性,消弱外界信号波动的影响;PCB板图设计时要保证元器件的布局及布线的合理,降低各元器件及电路之间的相互干扰。软件的设计内容主要包括:编译器的选择、流程图设计及相关程序的开发。
主要研究了数据采集系统的A/D转换速率和A/D转换精度。首先测试分析系统的A/D转换速率,确定最高转换速率值,讨论实际转换速率与理论值之间的关系。再者研究探讨A/D转换的精度,由于A/D转换精度与转换速率之间存在紧密的联系,第一步主要研究不同速率下的实际转换精度;由于随机误差对系统测试精度的影响,第二步主要研究在求均值的方式下系统A/D转换精度;由于系统误差对A/D转换精度的影响,第三步主要研究误差补偿后A/D转换精度。
关键词:数据采集;C8051F350;通讯方式;A/D精度
5.2 A/D转换精度的测试研究
本实验系统对精度的测试研究需要有稳定的的电压信号源,由于直接使用电池产生的信号稳定性不好,波动较大,所以使用稳压芯片产生稳定的直流电压信号输入到模拟信号采集端。采用5V直流电源给系统供电。数据采集模块中核心处理器C8051F350芯片的内置AD最高允许输入的电压值为2.5V左右。为了安全起见,实验时最高输入电压信号限定在2V左右。
连接好的实验系统如图5.3所示,实验时具体操作步骤如下:先将程序下载器、接口转换器(USB转RS-485)、5V直流电源模块、稳压模拟信号输入接口等连接完成。然后将测试程序烧入单片机,断开下载器,用KEITHLEY公司的Model 20## Multimeter(精度为0.010mV)测量参考基准电压值,随后测量模拟信号通道引脚的电压值,通过串口监控器记录数据。

图5.3 精度测试时系统连接图
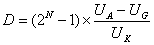
由于C8051F350芯片内置AD为24位精度,因此模数转换的公式为:
 (5.2)
(5.2)
式中 D ——模数转换得到的数字量
UA——模拟通道输入电压
N ——AD转换器位数,本系统中N=12
UG——AD转换参考地,由于是单端输入,所以取零
UK——参考基准电压值
根据式(5.2)可知,每一个电压模拟信号都有其对应的数字量。实验中,输入稳定的直流电压信号,读取AD转换后的数字量,通过实际采集数字量与理论数字量的比较来考核AD转换的精度。
由干电池供电,利用稳压芯片和分压电路,分别产生接近0.5V、2.0V的两种直流电压信号,输入到数据采集系统模块输入端口进行AD转换实验。由式(5.2)计算得到两种电压对应的理论数字量,对比得到每种情况下的A/D精度。
对于每一种电压值,做三次实验,每次实验采集500个数据。在每种电压条件下随机抽取某一次实验采集的500个数据,按照与理论数字量之间的偏差进行量化统计,观察分析系统达到的精度。
5.2.1 使用内部参考基准电压时A/D精度测试
因为研制的数据采集系统的A/D转换精度与A/D转换速率之间存在紧密的关系,所以分别测试速率为100ksps、50ksps、10ksps、5ksps、1ksps下的A/D转换精度。
1)A/D转换速率为100ksps
当设定转换速率为100ksps时,对三种电压模拟信号分别进行测试,对于每一种电压值,做三次实验,每次实验采集500个数据。在每种电压条件下随机抽取某一次实验测试采集的500个数据,按照与理论数字量之间的偏差进行量化统计,统计结果如表5.2所示。
从表5.2中可以看出,数据采集过程中,对于某一个随机电压信号测量值,该C8051F350单片机内置的24位AD能保证的实际转换精度仅仅是在6位左右,与标称的24位分辨率相差甚远,实际工程测试中这样的进度也很难满足要求。因此,需要用编程方法,从软件上进行误差的校正[21],改善系统性能。
//-----------------------------------------------------------------------------
// F41x_ADC0_ExternalInput.c
//-----------------------------------------------------------------------------
// Copyright 20## Silicon Laboratories, Inc.
// http://www.silabs.com
//
// Program Description:
// --------------------
//
// This example code takes and averages 20## analog measurements from input
// P1.1 using ADC0, then prints the results to a terminal window via the UART.
//
// The system is clocked by the internal 24.5MHz oscillator. Timer 2 triggers
// a conversion on ADC0 on each overflow. The completion of this conversion
// in turn triggers an interrupt service routine (ISR). The ISR averages
// 20## measurements, then prints the value to the terminal via printf before
// starting another average cycle.
//
// The analog multiplexer selects P1.1 as the positive ADC0 input. This
// port is configured as an analog input in the port initialization routine.
// The negative ADC0 input is connected via mux to ground, which provides
// for a single-ended ADC input.
//
// A 100kohm potentiometer may be connected as a voltage divider between
// VREF and AGND on the terminal strip as shown below:
//
// ---------
// |
// o| VREF ----|
// o| GND ---|<-|
// o| P1.1 | |
// o| | |
// o| --------
// o|
// |
//----------
// C8051F410-TB
//
// Terminal output is done via printf, which directs the characters to
// UART0. A UART initialization routine is therefore necessary.
//
// ADC Settling Time Requirements, Sampling Rate:
// ----------------------------------------------
//
// The total sample time per input is comprised of an input setting time
// (Tsettle), followed by a conversion time (Tconvert):
//
// Tsample = Tsettle + Tconvert
//
// |--------Settling-------|==Conversion==|----Settling--- . . .
// Timer 2 overflow ^
// ADC0 ISR ^
//
// The ADC input voltage must be allowed adequate time to settle before the
// conversion is made. This settling depends on the external source
// impedance, internal mux impedance, and internal capacitance.
// Settling time is given by:
//
// | 2^n |
// Tsettle = ln | --- | * Rtotal * Csample
// | SA |
//
// In this application, assume a 100kohm potentiometer as the voltage divider.
// The expression evaluates to:
//
// | 2^10 |
// Tsettle = ln | ---- | * 105e3 * 5e-12 = 4.4uS
// | 0.25 |
//
// In addition, one must allow at least 1.5uS after changing analog mux
// inputs or PGA settings. The settling time in this example, then, is
// dictated by the large external source resistance.
//
// The conversion is 10 periods of the SAR clock <SAR_CLK>. At 3 MHz,
// this time is 10 * 400nS = 3.3 uS.
//
//
// Tsample, minimum = Tsettle + Tconvert
// = 4.4uS + 3.3uS
// = 7.7 uS
//
// Timer 2 is set to change the mux input and start a conversion
// every 100uS, which is far longer than the minimum required.
//
// F330 Resources:
// ---------------
// Timer1: clocks UART
// Timer2: overflow initiates ADC conversion
//
//
// How To Test:
// ------------
// 1) Download code to a 'F410 device on a C8051F410-TB development board
// 2) Connect serial cable from the transceiver to a PC
// 3) On the PC, open HyperTerminal (or any other terminal program) and connect
// to the COM port at <BAUDRATE> and 8-N-1
// 4) Connect a variable voltage source (between 0 and Vref)
// to P1.1, or a potentiometer voltage divider as shown above.
// 5) HyperTerminal will print the voltage measured by the device if
// everything is working properly
//
// FID: 41X000030
// Target: C8051F410
// Tool chain: Keil C51 7.50 / Keil EVAL C51
// Command Line: None
//
//
//-----------------------------------------------------------------------------
// Includes
//-----------------------------------------------------------------------------
#include <c8051f410.h> // SFR declarations
#include <stdio.h>
#include <math.h>
//-----------------------------------------------------------------------------
// 16-bit SFR Definitions for 'F41x
//-----------------------------------------------------------------------------
sfr16 TMR2RL = 0xca; // Timer2 reload value
sfr16 TMR2 = 0xcc; // Timer2 counter
sfr16 ADC0 = 0xbd; // ADC0 result
sbit P1_3 = P1^3; //定义P1.3引脚
sbit P1_5 = P1^5; //定义P1.5引脚
//-----------------------------------------------------------------------------
// Global CONSTANTS
//-----------------------------------------------------------------------------
#define SYSCLK 24500000 // SYSCLK frequency in Hz
#define BAUDRATE 115200 // Baud rate of UART in bps
//-----------------------------------------------------------------------------
// Function PROTOTYPES
//-----------------------------------------------------------------------------
void SYSCLK_Init (void);
void PORT_Init (void);
void Timer2_Init(void);
void ADC0_Init(void);
void UART0_Init (void);
void Rs232_Send(unsigned int result);
//-----------------------------------------------------------------------------
// MAIN Routine
//-----------------------------------------------------------------------------
void main (void)
{
PCA0MD &= ~0x40; // WDTE = 0 (clear watchdog timer
// enable)
SYSCLK_Init (); // Initialize system clock to
// 24.5MHz
PORT_Init (); // Initialize crossbar and GPIO
Timer2_Init(); // Init Timer2 to generate
// overflows to trigger ADC
UART0_Init(); // Initialize UART0 for printf's
ADC0_Init(); // Initialize ADC0
EA = 1; // enable global interrupts
while (1)
{ // spin forever
}
}
//-----------------------------------------------------------------------------
// Initialization Subroutines
//-----------------------------------------------------------------------------
//-----------------------------------------------------------------------------
// SYSCLK_Init
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : None
//
// This routine initializes the system clock to use the internal 24.5MHz
// oscillator as its clock source. Also enables missing clock detector reset.
//
//-----------------------------------------------------------------------------
void SYSCLK_Init (void)
{
OSCICN = 0x87; // configure internal oscillator for
// 24.5MHz
RSTSRC = 0x04; // enable missing clock detector
}
//-----------------------------------------------------------------------------input
// PORT_Init
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : None
//
// Configure the Crossbar and GPIO ports.
// P0.4 - UART TX (push-pull))
// P0.5 - UART RX
// P1.1 - ADC0 analog
// P1.3 - LED (push-pull
//
//-----------------------------------------------------------------------------
void PORT_Init (void)
{
XBR0 = 0x01; // Enable UART0
XBR1 = 0x40; // Enable crossbar and weak pull-ups
P0MDOUT |= 0x10; // Set TX pin to push-pull
P1MDIN &= 0xFE; // set P1.7 as an analog input
P1SKIP |= 0x01; // skip P1.7 pin
// P1MDIN &= 0xEB; // set P1.2 as input P1.2为C51内部AD基准电压外接参考接入引脚
// P1SKIP |= 0x04; // skip P1.2 pin
//P1MDOUT |= 0x28; // 1.3 1.5 to push-pull
//P1_3 = 0; //选择传感器量程
//P1_5 = 1; //传感器休眠控制引脚0状态为休眠
}
//-----------------------------------------------------------------------------
// Timer2_Init
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : None
//
// Configure Timer2 to 16-bit auto-reload and generate an interrupt at 100uS
// intervals. Timer 2 overflow automatically triggers ADC0 conversion.
//
//-----------------------------------------------------------------------------
void Timer2_Init (void)
{
TMR2CN = 0x00; // Stop Timer2; Clear TF2;
// useK a SYSCLs timebase, 16-bit
// auto-reload
CKCON = 0x30; // select SYSCLK for timer 2 source
TMR2RL = -(SYSCLK /10000); // init reload value for 20uS(采样频率为50k)
TMR2 = 0xffff; // set to reload immediately
TR2 = 1; // start Timer2
}
//-----------------------------------------------------------------------------
// ADC0_Init
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : None
//
// Configures ADC0 to make single-ended analog measurements on pin P1.1
//
//-----------------------------------------------------------------------------
void ADC0_Init (void)
{
ADC0CN = 0x03; // ADC0 disabled, normal tracking,
// conversion triggered on TMR2 overflow
REF0CN = 0x0A; // Enable on-chip VREF = 2.2v and buffer
ADC0MX = 0x08; // Set P1.0 as positive input
ADC0CF=(SYSCLK/3000000-1)<<3; // set SAR clock to 3MHz
//rick add
//ADC0CF = (int)(floor(SYSCLK/4900000)-1)<<3;
//ADC0TK =0xFF;
ADC0CF |= 0x00; // right-justify results
EIE1 |= 0x08; // enable ADC0 conversion complete int.
AD0EN = 1; // enable ADC0
}
//-----------------------------------------------------------------------------
// UART0_Init
//-----------------------------------------------------------------------------
//
// Return Value : None
// Parameters : None
//
// Configure the UART0 using Timer1, for <BAUDRATE> and 8-N-1.
//
//-----------------------------------------------------------------------------
void UART0_Init (void)
{
SCON0 = 0x10; // SCON0: 8-bit variable bit rate
// level of STOP bit is ignored
// RX enabled
// ninth bits are zeros
// clear RI0 and TI0 bits
if (SYSCLK/BAUDRATE/2/256 < 1) {
TH1 = -(SYSCLK/BAUDRATE/2);
CKCON |= 0x08; // T1M = 1; SCA1:0 = xx
} else if (SYSCLK/BAUDRATE/2/256 < 4) {
TH1 = -(SYSCLK/BAUDRATE/2/4);
CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 01
CKCON |= 0x01;
} else if (SYSCLK/BAUDRATE/2/256 < 12) {
TH1 = -(SYSCLK/BAUDRATE/2/12);
CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 00
} else if (SYSCLK/BAUDRATE/2/256 < 48) {
TH1 = -(SYSCLK/BAUDRATE/2/48);
CKCON &= ~0x0B; // T1M = 0; SCA1:0 = 10
CKCON |= 0x02;
} else {
while (1); // Error. Unsupported baud rate
}
TL1 = TH1; // init Timer1
TMOD &= ~0xf0; // TMOD: timer 1 in 8-bit autoreload
TMOD |= 0x20;
TR1 = 1; // START Timer1
TI0 = 1; // Indicate TX0 ready
}
//发送程序-from rick
//将数据通道232通讯或者485传输到上位机
/*void Rs232_Send(unsigned int result)
{
SBUF0=result;
while(TI0==0)
{};
TI0=0;
}
*/
//-----------------------------------------------------------------------------
// Interrupt Service Routines
//-----------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------
// ADC0_ISR
//-----------------------------------------------------------------------------
//
// This ISR averages 20## samples then prints the result to the terminal. The
// ISR is called after each ADC conversion which is triggered by Timer2.
//
//-----------------------------------------------------------------------------
void ADC0_ISR (void) interrupt 10
{
static unsigned int measurements = 0; // measurement counter //当整型变成长整型时,速率变慢,变成0.7倍左右-rick add
static unsigned int number = 0;
static unsigned long int acount = 0;
static unsigned int result=0;
unsigned long int a[2];
unsigned long int i;
unsigned int HighData,LowData;
AD0INT = 0; // clear ADC0 conv. complete flag
acount += ADC0;
measurements++;
if(measurements == 200) //采集次数不要超过32767,否则速度变慢,数据值没错-rick add
{
number++;
if (number ==1 )
{
result = acount/measurements;
HighData=result>>8;
LowData=result;
a[0]=HighData & 0X0F;
a[1]=LowData;
//a[0]=ADC0H & 0X0F;
//a[1]=ADC0L;
for(i=0;i<2;i++)
{
SBUF0=a[i];
while(TI0==0)
{};
TI0=0;
}
number = 0;
}
measurements = 0;
acount = 0;
}
}
//-----------------------------------------------------------------------------
// End Of File
//-----------------------------------------------------------------------------
-
单片机实验报告(基于51单片机)
滨江学院微机原理与接口技术综合实验报告题目:简易电子琴设计学号:学生姓名:XXX院系:滨江学院专业:指导教师:二OXX年月日【摘要…
-
51单片机课程设计实验报告
51单片机课程设计报告学院:专业班级:姓名:指导教师:设计时间:51单片机课程设计一、设计任务与要求1.任务:制作并调试51单片机…
-
51单片机实验报告
08424020xx单片微型计算机原理学院班级学号姓名指导教师成绩120xx年6月08424020xx硬件实验实验一定时器中断实验…
-
51单片机实验报告
08424020xx硬件实验实验一定时器中断实验实验内容fosc110592MHzT0方式2产生定时中断实现秒表功能数码管后两位显…
-
80C51单片机-实验报告
班级姓名学号单片机实验报告实验一CPU片内外清零1CPU片内RAM清零一实验目的掌握MCS51汇编语言的设计了解单片机的寻址方式以…
-
51单片机课程设计实验报告
51单片机课程设计报告学院:专业班级:姓名:指导教师:设计时间:51单片机课程设计一、设计任务与要求1.任务:制作并调试51单片机…
-
基于51单片机制作电子时钟实训报告
绪论单片机应用简述电子时钟简介电子时钟的基本特点任务要求设计方案控制系统的硬件设计芯片的选择AT89S51的功能概述AT89S51…
-
51单片机实训报告
51单片机精简开发板的组装及调试实训报告为期一周的单片机实习已经结束了通过此次实训让我们掌握了单片机基本原理的基础单片机的编程知识…
-
51单片机课程设计报告
重庆科技学院学生实习实训总结报告学院电气与信息工程学院专业班级XXXXXX学生姓名XXX学号20xxXXXXXX实习实训地点逸夫科…
-
51单片机电子时钟课程设计报告
JINGCHUUNIVERSITYOFTECHNOLOGY单片机原理及应用课程设计报告题目电子时钟专业电气工程及其自动化班级20x…