可编程控制器应用课程设计报告
青岛农业大学
可编程控制器应用课程设计报告
20##——20##学年 第1学期
题 目: 塔吊的PLC控制系统设计
姓 名:
学 号:
专业班级:
指导老师:
20##年12月6日
塔吊的PLC控制系统设计
一、可编程控制器(PLC)概述
1、PLC工作原理
PLC与继电器构成的控制装置的重要区别之一就是工作方式不同,继电器控制是并行运行方式,即如果输出线圈通电或断电,该线圈的触点立即动作,只要形成电流通路,就有可能有几个电器同时动作。而PLC则不同,它采用循环扫描技术,只有该线圈通电或断电,并且必须当程序扫描到该线圈时,该线圈触点才会动作,而且每次它只能执行一条指令,这也就是说PLC以“串行”方式工作的,这种工作方式可以避免继电器控制的触点竞争和时序失配等问题。也可以说,继电器控制装置是根据输入和逻辑控制结构就可以直接得到输出,而PLC控制则需要输入传送、执行程序指令、输出3个阶段才能完成控制过程。
PLC采用循环扫描技术可以分为3个阶段:输入阶段(将外部输入信号的状态传送到PLC)、执行程序和输出阶段(将输出信号传送到外部设备)。扫描过程如图1-3所示。
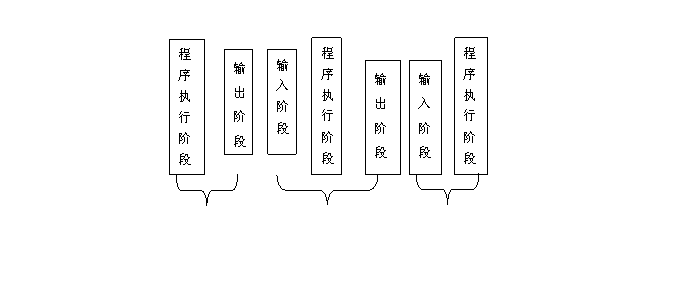
图1 循环扫描
在输入阶段中,PLC先进行自我诊断,然后与编程器或计算机通信,同时中央处理器扫描各个输入端并读取输入信号的状态和数据,并把它们存入相应的输入存储单元。
在执行阶段中,PLC按照由上到下的次序逐步执行程序指令。从相应的输入存储单元读入输入信号的状态和数据,然后根据程序内部继电器、定时器、计数器数据寄存器的状态和数据进行逻辑运算,得到运算结果,并将这些结果存入相应的输出存储器单元。
在输出阶段中,PLC将相应的输出存储单元的运算结果传送到输出模块上,并通过输出模块向外部没备传送输出信号,开始控制外部设备。
2、 PLC的构成
从结构上分,PLC分为固定式和组合式(模块式)两种。固定式PLC包括CPU板、I/O板、显示面板、内存块、电源等,这些元素组合成一个不可拆卸的整体。模块式PLC包括CPU模块、I/O模块、内存、电源模块、底板或机架,这些模块可以按照一定规则组合配置。
(1)、CPU的构成
CPU是PLC的核心,起神经中枢的作用,每套PLC至少有一个CPU,它按PLC的系统程序赋予的功能接收并存贮用户程序和数据,用扫描的方式采集由现场输入装置送来的状态或数据,并存入规定的寄存器中,同时,诊断电源和PLC内部电路的工作状态和编程过程中的语法错误等。进入运行后,从用户程序存贮器中逐条读取指令,经分析后再按指令规定的任务产生相应的控制信号,去指挥有关的控制电路。
CPU主要由运算器、控制器、寄存器及实现它们之间联系的数据、控制及状态总线构成,CPU单元还包括外围芯片、总线接口及有关电路。内存主要用于存储程序及数据,是PLC不可缺少的组成单元。
(2)、I/O模块
PLC与电气回路的接口,是通过输入输出部分(I/O)完成的。I/O模块集成了PLC的I/O电路,其输入暂存器反映输入信号状态,输出点反映输出锁存器状态。输入模块将电信号变换成数字信号进入PLC系统,输出模块相反。I/O分为开关量输入(DI),开关量输出(DO),模拟量输入(AI),模拟量输出(AO)等模块。常用的I/O分类如下:
开关量:按电压水平分,有220VAC、110VAC、24VDC,按隔离方式分,有继电器隔离和晶体管隔离。
模拟量:按信号类型分,有电流型(4-20mA,0-20mA)、电压型(0-10V,0-5V,-10-10V)等,按精度分,有12bit,14bit,16bit等。
除了上述通用IO外,还有特殊IO模块,如热电阻、热电偶、脉冲等模块。
按I/O点数确定模块规格及数量,I/O模块可多可少,但其最大数受CPU所能管理的基本配置的能力,即受最大的底板或机架槽数限制。
(3)、电源模块
PLC电源用于为PLC各模块的集成电路提供工作电源。同时,有的还为输入电路提供24V的工作电源。电源输入类型有:交流电源(220VAC或110VAC),直流电源(常用的为24VDC)。
(4)、底板或机架
大多数模块式PLC使用底板或机架,其作用是:电气上,实现各模块间的联系,使CPU能访问底板上的所有模块,机械上,实现各模块间的连接,使各模块构成一个整体。
3、PLC的特点
PLC之所以越来越受到控制界人士的重视,是和它的优点分不开的:
(1)、功能齐全,它的适用性极强,几乎所有的控制要求,它均能满足;
(2)、应用灵活, 其标准的积木式硬件结构,以及模块化的软件设计,使得它不仅可以适应大小不同、功能繁复的控制要求,而且可以适应各种工艺流程变更较多的场合;
(3)、操作方便,维修容易,稳定可靠。尽管PLC有各种型号,但都可以适应恶劣的工业应用环境,耐热、防潮、抗震等性能也很好,一般平均无故障率可达几万小时。
二、设计任务
1、基本要求
(1)、启动按钮:它是一个双功能按钮,即启动和电笛功能。无论何时,只要按下该按钮,都可以控制电笛的鸣响。此外,仅当空气开关闭合时,按下次按钮,系统才可以启动。
(2)、急停按钮:红色自锁式蘑菇头按钮,与启动按钮相反,急停按钮的作用是切断主回路的总接触器,从而是各机构紧急停车。
(3)、升降操作:升降操作通过右联动台上的手柄控制。上升时往上拉,下降时往里推。上升和下降各分为四个档位。其中一档电机工作在低速状态,其他工作在高速状态。
(4)、变幅操作:变幅操作通过左联动台上的手柄控制。外变幅时将手柄竖直的往前推,内变幅各分两档。对应于低高两种速度。
(5)、回转操作:回转操作通过左联动台的手柄进行控制。左转时将手柄横着往右扳。手柄左右方向各分三档,对用于从低到高三种回转速度。
(6)、回转制动:设回转制动按钮,当此按钮按下,回转动作立即停止。
2、系统提示与警报信号
(1)、超力矩信号
当起重力矩超过最大允许值时电控系统做如下反应:右联动台上的红色:“超力矩”报警灯亮;主钩的上升运动被禁止。
(2)、超重量信号
当起重重量超过最大允许值时电控系统做如下反应:右联动台上的红色:“超重量”报警灯亮;主钩的上升运动被禁止。
(3)、高度限位信号
当高度达到限位值时,主钩的上升运动被禁止。
(3)、变幅、超重、高度减慢信号
当力矩、重量和高度超过一定范围是电控系统做如下反应:升降速度如果在四档减速为三档,变幅速度如果在二档减速至二档。
(4)、风速报警信号
当风速超过最大工作风速时,停止提升动作。
(5)、变幅限位信号
变幅限位信号分为内限位信号和外限位信号,当小车向外运动时,若开到臂头碰到外限位开关,小车的向外运动被禁止,如正在向外变幅会突然停止。类似,当小车向内运动时,若开到内侧碰到内限位开关,小车的向内运动被禁止,如正在向内变幅会突然停止。
(6)、操作台零位保护
为了防止起重机操作台主令手柄在非零位置(即工作档位)上工作时突然停电,操作人员离开操作台时忘了将手柄拉回零位,当起重机恢复供电时,可能造
起重机自行起动的事故,程序需要添加零位保护功能。有了零位保护,当起重机意外断电后再送电,操作手柄不在零位起重机也不会自行起动了。
三、设计方案
1、I/O口分配
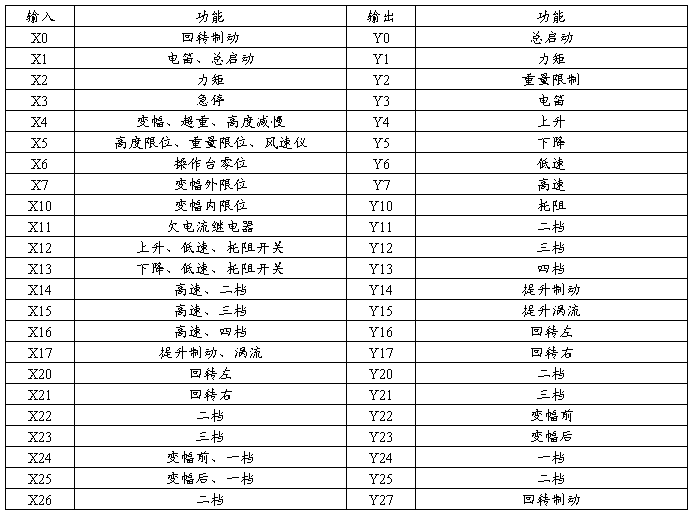
如上图所示,因为本设计所控制的机构比较多,而且大部分的动作都是由一个独立按钮控制,所以本设计用到的输入输出较多,由于输入有限,对于某些动作,我们进行了相应的组合,比如控制上升、低速和托阻的输出,我们采用一个输入控制,这样控制,即减少了输入口的使用,同时也简化了操作流程,并且这种方式也满足了设计的要求。
2、程序设计
该设计中,多为某个开关控制某个输出或多个输出,未涉及到顺序控制程序跳转等,因此用一般的输入输出指令便可实现,但是在程序设计中,有两个方面的问题需要特别注意:
(1)、开关互锁问题
在该设计中,有些动作是不能同时进行的,比如上升和下降、变幅前和变幅后以及回转左和回转右,因此,在程序设计中,一定要注意动作的互锁,比如在上升操作控制中添加一个控制下降输入的常闭开关,这样,在下降操作时,上升操作被禁止。
(2)、双线圈问题
在程序中,有些输出不止有一个输入控制,比如上升时的高速输出,因此不可避免会产生双线圈的问题,一旦出现双线圈,只有最后一个输出有效,之前的输出全部不能使用。为了解决双线圈的问题,我们采用置位和复位指令代替输出指令,但是在采用置位指令后,一定要正确的复位,防止输出一直为高电平。
四、心得体会
自动控制系统课程设计结束,通过自己的努力和团队之间的合作,我们圆满的完成了课程设计的各项要求,当看到自己的成果,心里的成就感让自己感到喜悦。但这次实习带给我们的不仅仅是这些,还有就是从中学到的其他的东西。
在自己没有进行实习前,自认为自己的相关知识学得还不错,但当自己真正开始做一个实际的东西时,发现自己所学的知识还是远远不够的,毕竟理论和实践之间还是存在很大的差距的。刚发下题目的时候,觉得有些无从下手,根本就找不到一个合理的方案。于是开始从请教老师,从网上找资料。经过半天的研究,自己才算是有一些思路,在这里,感谢老师的耐心教导。
另外在设计过程中,我们也遇到了一些意想不到的问题,刚开始我们确认方案的时候,没有考虑双线圈的问题,到程度编写出来发现实验效果与我们预计的不同,最后发现是双线圈导致前面的输出无效。该最后经过我们谈论和实验,采取置位和复位指令代替输出,从新开始编程,最后顺利完成课程设计。
实习结束了,但在实习中学到的东西却还没有结束,就是通过这样的实践操作,才会让自己真正把理论应用于实践,才会真正的学以致用。
附:PLC梯形图程序
第二篇:可编程控制器应用的课程设计
课程设计任务及要求
1、题目:基于西门子PLC交通灯的控制
交通灯的控制要求是能实现“正常循环运行”和“急车强通控制”两种控制形式。
2、正常循环运行具体控制要求
按下启动按钮后,交通灯控制系统开始工作。先亮南北方向绿灯和东西方向红灯,再亮东西方向绿灯和南北方向红灯,然后再亮南北方向绿灯和东西方向红灯,这样一直循环执行。
(1)南北直行绿灯先亮,持续30秒,南北直行绿灯闪亮3秒,然后南北直行黄灯亮2秒,南北直行红灯亮45秒。南北黄灯亮的同时南北左传绿灯亮持续10秒,南北左传黄灯亮持续2秒,然后南北左传红灯持续亮78秒。在南北左传红灯亮的同时东西直行绿灯亮持续30秒,然后东西直行绿灯闪亮3秒接着东西直行黄灯亮2秒,东西直行红灯亮45秒,在东西直行黄灯亮的同时东西左传绿灯亮持续10秒,接着东西左传黄灯亮2秒,然后东西左传变为红灯。在其变为红灯的同时南北直行绿灯亮,开始下一个循环。
(2)南北方向和东西方向人行道均设有绿灯、黄灯、红灯。人行道上的“红黄绿”与同方向主干道上直行“红黄绿”灯运行方式相同。
2、急车强通控制的具体控制要求
(1)急车强通控制受强通开关的控制。无急车时,按正常循环时序控制,有急车时按下急车强通开关。不管原来信号是什么状态,一律强制让急车来车方向的绿灯亮,直到急车通过为止,断开急车强通开关后即按正常时序控制。
(2)急车强通信号只能响应一条路上的车来,若两条交叉的;路口在两条交叉的路口,东西和南北先后都来车,则响应先来的一方,随后响应另一方。
注:具体的格式网上可以查到。
-
可编程控制器应用课程设计报告
青岛农业大学可编程控制器应用课程设计报告20xx20xx学年第1学期题目塔吊的PLC控制系统设计姓名学号专业班级指导老师20xx年…
-
可编程控制器技术课程设计报告
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信工程专业:通信工程年级:061班姓名:**学号:…
-
可编程控制器课程设计报告
可编程控制器课程设计报告题目:基于PLC的自动洗衣机控制系统设计年级:2009级班级:自动化1班姓名:王**学号:**指导教师:张…
-
可编程控制器课程设计
可编程控制器课程设计中央空调的设计一前言我国是一个人均能源相对贫乏的国家人均能源占有量不足世界水平的一半随着我国经济的快速发展我国…
-
电气控制及可编程控制器课程设计报告
扬州大学水利与能源动力工程学院本科生课程设计课程:电气控制及可编程控制器课程设计专业:建筑电气与智能化班级:建电1102班学号:姓…
-
《可编程控制器课程设计》20xx1224
齐鲁工业大学课程设计大纲学院名称课程名称开课院系执笔人审定人电气控制与自动化学院可编程控制器课程设计王斌鹏张新荣修制订日期20xx…
-
电大《机电控制及可编程序控制器技术》课程设计报告
南京广播电视大学机电控制与可编程控制器技术课程设计报告专业题目超大功率高速提升机全数字电控系统学生姓名学号123210125047…
-
电气传动与可编程控制器实践课程(02208)考核大纲
河南工业大学自考助学本科电气传动与可编程控制器实践课程考核大纲课程代码02208河南工业大学继续教育学院一课程性质目的及任务电气传…
-
可编程控制器技术课程设计报告
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信工程专业:通信工程年级:061班姓名:**学号:…
-
电气控制及可编程控制器 设计报告
本科生课程设计课程电气控制及可编程控制器专业班级学号姓名指导教师完成日期摘要可编程控制器PLC是以计算机技术为核心的通用自动化控制…