可编程控制器课程设计任务书
周二周三:第一个流程调试出来
可编程控制器课程设计
任务书及指导书
(电子版)
机电控制教研室
20xx年9月
目 录
一、可编程控制器课程设计任务书
二、可编程控制器课程设计指导书
(一)PLC控制系统设计的一般步骤及方法
(二)PLC的选型问题
(三)皮带输送机系统工作流程控制的基本要求
(四)模拟显示屏
(五)I/O分配
(六)控制面板
附录一:PLC控制程序设计指导书
(一)控制程序的结构
(二)初始化程序
(三)自动控制程序
附录三:参考资料
可编程控制器课程设计
任务书及指导书
一、可编程控制器课程设计任务书
(一) 目的
本课程设计是“可编程控制器”课程整个教学环节的重要组成部分,根据教学大纲安排,本课程设计是为帮助学生进一步理解、掌握和深化课堂教学的 内容,配合“港机控制系统”课程,作为加强基本技能训练,和生产实践相结合的教学环节。
要求学生通过课程设计,综合运用所学的基础理论和专业知识,学会PLC控制系统设计的方法和步骤,培养分析问题和解决问题的独立工作能力,完成一名机电工程师初步的设计技术训练。
(二) 题目
中型散货码头皮带输送机系统的工作流程控制
(三) 控制系统设计的有关资料和参数
对象:海运、进出、双向、多功能、中型散货煤码头
码头布置方式:沿岸线平行布置
码头平面图:如中型散货煤码头装卸流程图所示
设计吞吐量:800——1000吨/小时
工作机械:高效卸船机 一台
装船机 一台
斗轮机 二台
皮带输送机 双向 一条
单向 十二条
皮带输送机参数:电机:绕线式异步电动机
电机启动方式:转子串电阻启动
级数 3级
启动时间: 小于60秒
输送皮带: 宽度 1.2米
带速 4米/秒
皮带输送机的故障检测: 电机过载、过流、皮带跑偏、撕裂
计量装置:电子皮带称 三台
(四) 设计任务
1、 完成控制系统操作面板布置图一份。
2、 完成可编程控制器输入输出端子分配表一份。
3、 完成控制系统模拟实验电路原理图一份。
4、 完成经调试的控制系统程序清单一份,其中包括程序结构框图、功能表图,和程序注释等。
以上四项任务均在规定的时间内完成,并汇总整理成课程设计报告,交指导老师审阅,控制系统程序答辩时在模拟装置上演示,根据设计的图表、程序清单和答辩情况由指导老师评定成绩。
(五) 要求
1、 以认真踏实的态度进行课程设计,充分发挥自己的主观能动性,通过课程设计培养分析 和解决问题的独立工作能力,养成严肃认真,实事求是的科学作风。
2、 要认真学习和研究有关的技术资料,包括“帮助”软件,充分利用现场参观的条件、熟悉控制对象的实际使用要求,搞清工作流程控制的具体任务和实际要求。
3、 在确定控制系统设计方案时,小组内应充分展开讨论,搞清每一个细节问题,在此基础上再进行程序设计,切忌仓促.上阵,而后重返工。
4、 提倡独立思考,小组讨论,相互交流;反对拖拉等待,闭门造车,盲目抄袭。
5、 计算书中所采用的符号、数公式可参考有关教材和专业书籍、必须符合国家计量
标准。
6、 系统图、电路图的绘制必须符合国家电气制图标准。图面要求表达清楚、正确,
并力求整洁。
7、 程序设计一律采用梯形图,经调试后打印出来。
8、 课程设计说明书、电路图、程序清单一律采用16开纸整理,书写。
(六) 时间
按教学计划安排为二周。其中讲课、讨论二天;设计、编程、接线、调试、小结六天;考核两天。
具体的步骤和进度计划
第一周: 周一 布置课程设计任务书,讲解指导书
周二 设计操作面板,线路图,程序结构
周三 控制系统程序结构设计指导
周四 单流程程序编写及调试
周五 单流程程序编写及调试
第二周: 周一 单流程程序编写及调试
周二 总体程序编写及调试
周三 总体程序编写及调试,课程设计资料整理
周四 说明书撰写,准备答辩,准备充分的同学可以答辩
周五 课程设计答辩
二、可编程控制器课程设计指导书
(一)PLC控制系统设计的一般步骤和方法
PLC控制系统设计,一般应按下述几个步骤进行:
1、课题调查
在对一个控制系统进行设计之前,首先必须对控制对象进行调查,这样才可能提出符合实际的设计阶段。该阶段的主要任务是摸清应用对象的功能要求、工作流程和信息流程,搞清楚有关细节,并在此基础上提出系统的设计要求(所要达到的目标) 熟悉被控对象,明确控制任务与设计要求是本步骤的主要任务。
2、制定电气控制系统方案
根据生产工况和机械运动的控制要求,确定电控系统的工作方式,例如全自动、半自动、手动、单机运行、多机联线运行等工作方式。还要确定电控系统应有的其他功能,例如计量、故障诊断与显示报警、紧急情况的处理、管理功能、联网通信功能等。
3、确定电控系统的输入输出信号
通过研究工艺过程或机械运动的各相关步骤、各种状态、各种功能的发生、维持、结束、转换和其他的相互关系,来确定所需的各种控制信号和检测反馈信号、相互的转换和联系联系信号。并且确定哪些信号需要输入PLC,哪些信号要由PLC输出或者哪些负载要由PLC驱动,分类统计出各输入输出量的性质及参数。
4、PLC的选型与硬件配置
根据以上各步骤所得到的结果,选择合适的PLC型号并确定各种硬件配置。
5、PLC元件的编号分配
对各种输入输出信号占用的PLC输入、输出端点及其他PLC元件进行编号分配。列出PLC的输入、输出信号表,并设计出PLC的外部接线图。
6、程序设计
根据控制任务与设计要求,确定应用程序的基本结构。按程序设计的标准绘制出程序结构框图,然后再根据工艺要求,绘制出各功能单元的详细功能表图。在编写程序过程中,要及时对编写出的程序进行注释,以免忘记其相互关系,随编随注。注释要包括程序的功能、逻辑关系说明、设计思想、信号的来源和去向,以便于阅读和调试。在此基础上
逐条编写出梯形图程序或语句表程序。
7、模拟运行与调试程序
将设计好的程序转入PLC后,再逐条检查与验证,并改正程序设计时的语法、数据等错误,然后,可以在实验室进行模拟运行与调试程序,观察在各种可能的情况下各个输入量、输出量之间的变化关系是否符合设计要求。发现问题及时修改设计和已传送到PLC中的程序,直到完全满足功能表图或状态流程图的要求。
在进行程序设计和模拟运行调试的同时,可以平行地进行电控系统的其他部分工作,例如PLC外部电路和电气控制柜、控制台等的设计、装配、安装和接线等工作。
8、现场运行调试
完成以上各项工作后,即可将初步调试好的程序传送到现场使用的PLC储存器中,PLC接入实际输入信号与实际负载,进行现场运行调试,及时解决调试中发现的问题,直到完全满足设计要求,即可交付使用。
(二)PLC的选型问题
见教材内容。
(三)皮带输送机系统工作流程控制的基本要求
1、运行方式
通常要求有自动和手动两种运行方式,前者是正常的工作方式,后种是在设备调试、检修、和故障时必备的工作方式
因此,对每个工作流程都可用自动和手动的两种工作方式来实现。
在自动方式下,选定了工作流程,按下启动按纽,皮带输送机系统实现逆流延时自动启动;按下停机按纽,皮带输送机系统实现顺料流延时自动停机。
在手动方式下,每条输送机都可在中控室或生产线上单独启动或停机。流程1
2、联锁、故障报警与显示
联锁包括运行方式联锁,工作流程间的联锁(指两条不允许同时启动的工作流程)和皮带输送机之间的联锁(即某工作流程中前一条输送带启动过程的完成是后一条输送带允许启动的条件)。
在皮带输送机启动前,要发出设备准备启动的信号,提示现场工人注意安全。灯亮5次,平时运作灯亮着
当检测到设备故障时,要能自动紧急停机,同时还应提供适当的报警信号。
3、 正常工况下的启动与停机
系统启动之前,要监视故障指示,工作状态信号,预警号,报警等信号,只有在所有信号指示正常后才能确认启动。
当启动指令发出后,控制系统要判别上次停机是正常停机还是紧急停机,以便决定采用哪种启动方式。启动方式分正常工况下的启动与非正常工况下的启动,前者是正常停机后的启动方式。
正常启动方式有两种方案,(1)逆料流启动, (2)顺料流启动。后者适用于长距离输送带,有利于节能。港口一般采用逆料流启动方式,由输送线的最后一台设备开始启动,然后逐条向前,在给料设备启动之前,整个输送线已经全部启动完毕,故不会出现堆料事故。
正常工况下的停机是顺料流停机方式,先停输送线起始点的第一台设备,如给料机和与它相连的第一条输送带,待上面的物料全部运完后再停机,以后逐条停机,待整个流程上的料全部运完后,最后一台设备停机。
4、 故障情况下的启动和停机
输送线在设备发生严重故障如驱动电机过载、过流、皮带严重跑偏、撕裂时,都要求系统紧急停机。还要设紧停按钮
故障情况下的停机也有二种方案: (1) 全线设备同时紧急停机, (2)分段分别进行紧急停机和顺料流停机。后者也适用于长距离输送带,可避免物料堆积。港口一般采用全线设备同时停机方案。
由于在故障情况下,采用全线设备同时停机方案,故重新启动时,输送带上堆积着大量物料,全线设备均在重载下启动,容易产生故障。
(四)模拟显示屏

工作流程:
流程1:U→B1→B13→B9→B10→L 不同时 注:U-卸船机
流程2:U→B1→B2→B3→B4→D1 &5同时 L-装船机 流程3:U→B1→B11→B12→D2 &4同时 D-斗轮机 流程4:D1→B4→B5→B6→B7→B8→B9→B10→L B-皮带机 流程5:D2→B12→B6→B7→B8→B9→B10→L
公用一个设备的流程是不能同时工作的,但是没有公用的话是能同时工作的,比如4和3.
先进行流程的选择(按钮),再按启动,逆料流启动,按下停止,顺料流启动。流程选
择允许工作人员有误操作,比如说先按下了流程3,再按流程4,则响应的是后面的流程4。
能够同时工作的流程是不能共用停止和启动按钮。
只要有故障按钮按下去的时候,相关的流程都不能工作。比如说U发生故障,则流程1 2 3都不能工作了。
当流程正在工作而设备发生故障了,当故障修复的时候,这个流程不能自动重新恢复工作,要重新进行流程选择。
举例:先进行的是U B1 B13,按下停止按钮,再进行U B1 B2 B3,此时U发生故障了,当故障恢复的时候,则U B1 B13自动恢复,不需进行流程选择重新开始,而另一个需要重新进行流程选择。
(五) I/O分配

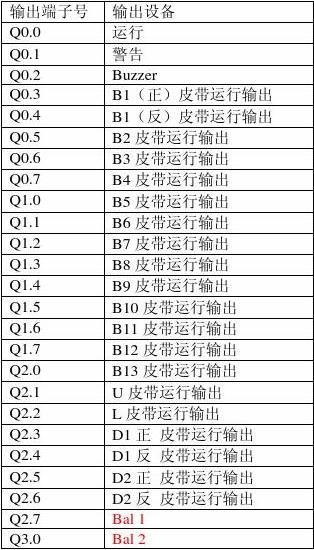
(六) 控制面板(此控制面板仅供参考,且细节处有误,请照搬的同学谨慎,以免编程及设计出错)


附录一:PLC控制程序设计指导
(一) 控制程序结构
PLC控制程序的结构通常有三种形式,1、线性程序:整个程序连续放置在一个指令块内,程序的结构类似模拟继电器控制的逻辑结构,这种程序结构简单直接,容易理解。
2、分块程序:整个程序分成若干个程序块,每个程序块包含一组设备和一系列工作的逻辑,这种程序便于编写、阅读。3、结构化程序:在程序中具有用户可定义参数的功能块,这种功能块在用户程序中可重复使用,使用时程序将参数传入功能块,这种程序的结构比较先进,使多次重复使用的程序大大简化。
以线性程序为例,皮带输送机流程控制程序的结构如下图所示:
(二) 初始化程序
通常初始化程序包括输出清零、内部辅助继电器复位、系统参数设置等内容。
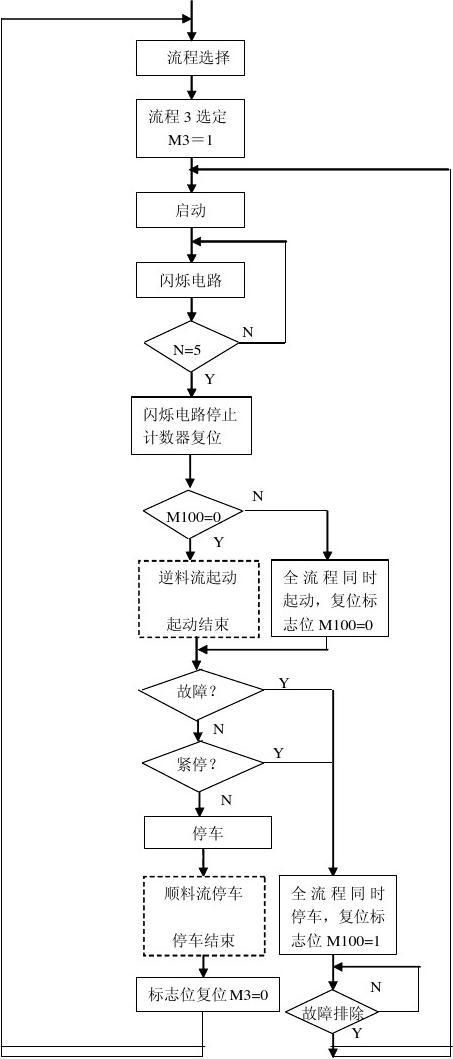
(三) 自动控制程序
皮带输送机系统流程控制程序设计中必须解决好正常情况下的启、停方式和故障情况下的启、停方式间的切换,可以用一个辅助继电器的状态来记忆系统停止的方式,是正常停机还是紧停,据此来决定下一次启动的方式。
下图是用这种方式编制程序的结构框图(这种方法不是唯一的,仅供参考)。

附录二: 参考资料
1,西门子S7-200 系统手册
Siemens AG 2004
2,PLC编程及应用(第三版)
廖常初 编著 机械工业出版社 2008
3,可编程控制器应用技术
田瑞庭主编 机械工业出版社 1994
4,电机与拖动基础
李发海,王岩编著 清华大学出版社 1994
5, 港口装卸机械
余洲生编
6, 可编程序控制器应用系统设计方法
李景学,金广业编著交通出版社 电子工业出版社 1995
第二篇:可编程控制器课程设计任务书1
中北大学
课程设计任务书
2011/2012 学年第 一 学期
学 院: 信息与通信工程学院
专 业: 电气工程及其自动化
学 生 姓 名: 学 号: 48-57
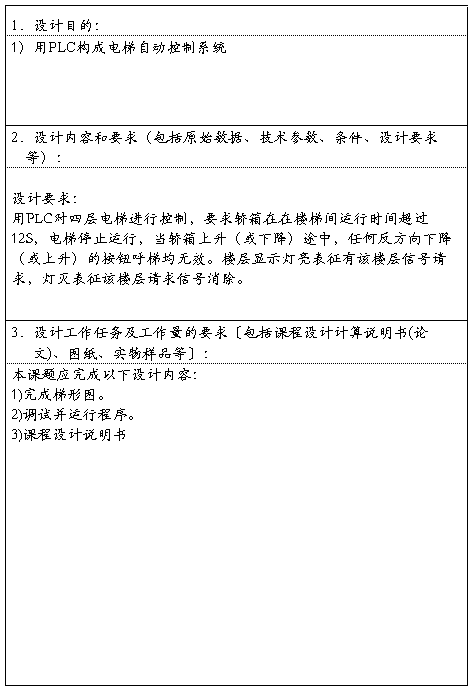
课程设计题目: 电梯控制
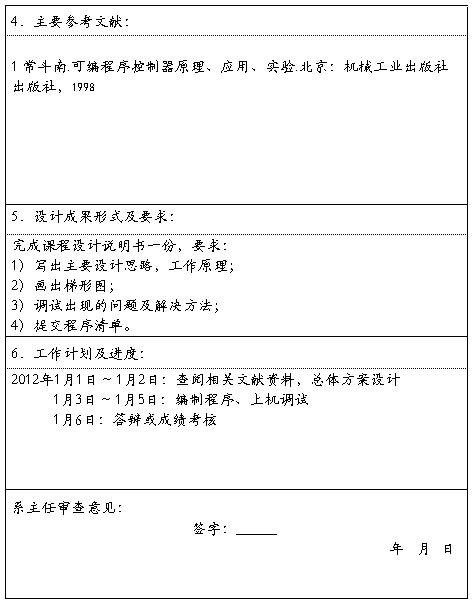
起 迄 日 期:2012年 1月 1 日~1 月 6 日
课程设计地点: 校内
指 导 教 师: 余红英
系 主 任: 王忠庆
下达任务书日期: 20##年1月1日
课 程 设 计 任 务 书
课 程 设 计 任 务 书
-
可编程控制器应用课程设计报告
青岛农业大学可编程控制器应用课程设计报告20xx20xx学年第1学期题目塔吊的PLC控制系统设计姓名学号专业班级指导老师20xx年…
-
可编程控制器技术课程设计报告
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信工程专业:通信工程年级:061班姓名:**学号:…
-
可编程控制器课程设计报告
可编程控制器课程设计报告题目:基于PLC的自动洗衣机控制系统设计年级:2009级班级:自动化1班姓名:王**学号:**指导教师:张…
-
可编程控制器课程设计
可编程控制器课程设计中央空调的设计一前言我国是一个人均能源相对贫乏的国家人均能源占有量不足世界水平的一半随着我国经济的快速发展我国…
-
电气控制及可编程控制器课程设计报告
扬州大学水利与能源动力工程学院本科生课程设计课程:电气控制及可编程控制器课程设计专业:建筑电气与智能化班级:建电1102班学号:姓…
-
《可编程控制器课程设计》20xx1224
齐鲁工业大学课程设计大纲学院名称课程名称开课院系执笔人审定人电气控制与自动化学院可编程控制器课程设计王斌鹏张新荣修制订日期20xx…
-
电大《机电控制及可编程序控制器技术》课程设计报告
南京广播电视大学机电控制与可编程控制器技术课程设计报告专业题目超大功率高速提升机全数字电控系统学生姓名学号123210125047…
-
电气传动与可编程控制器实践课程(02208)考核大纲
河南工业大学自考助学本科电气传动与可编程控制器实践课程考核大纲课程代码02208河南工业大学继续教育学院一课程性质目的及任务电气传…
-
可编程控制器技术课程设计报告
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信工程专业:通信工程年级:061班姓名:**学号:…
-
电气控制及可编程控制器 设计报告
本科生课程设计课程电气控制及可编程控制器专业班级学号姓名指导教师完成日期摘要可编程控制器PLC是以计算机技术为核心的通用自动化控制…