Z3050ҡ���괲����ʵϰ����
����������ʵϰ���桷
ѧ Ժ��

 �� ����
�� ����
�� ����
ѧ �ţ�
ָ����ʦ��
����##������
һ��ʵϰĿ��
�������Ƽ���ʵϰ����ѧϰ���õ�ѹ�����豸������������·�Ļ������ƻ��ڡ����ͻ�������������·���½ڵĻ����Ͻ��е�ʵ���Ի��ڡ�Ŀ��������ѧ�����ձ�רҵ������Ļ������ܺ�רҵ֪ʶ���������յ������ƻ������Ƶ�ԭ�������ӹ������ų�������
����ʵϰҪ��
1��ѧϰ���õ�ѹ������ʵ��Ӧ�á�
2�����ڽ����Ӵ������ȼ̵�����ʱ��̵�������ť���۶������г̿��ء���ѹ��·���ȳ��õ�ѹ�������а�װ��ʹ�á�ά��ѡ���������
3���������ճ��õ������Ƶ�·�İ�װ���ա����߷���������Ҫ�졢�����̺����ų����ܡ�
����ʵϰ����
1����װ�����Ӵ������˽�ԭ������������úͽ���λ�ã������Ų飻
2����Ϥ�ȼ̵����ȳ��õ�ѹ�����ṹԭ����װ�����˽⼼��������ѡ��
3�����z3050ҡ���괲��������ϵͳ�İ�װ�����ԡ�
�ġ�ʵϰ����
��ͨǯ�ӣ�һ�֡�ʮ����˿�������ñ�
����:һ����ư壬���ɵ���
�塢��װ���輰����Ҫ��
5.1 Z3050ҡ���괲�ӹ����ս���
�괲��һ����;�㷺�Ŀӹ�����������Ҫ������ͷ��������Ҫ��̫�ߵĿף�������������ס��¿ס��ۿף��Լ���ƽ�桢�����Ƶȡ�Z3050ҡ���괲��һ����ʽ�괲���������ӹ�����50mm�������ڵ��������������д��ж�Ĵ�������Ŀӹ���
 Z3050ҡ���괲����ԭ��ͼ
Z3050ҡ���괲����ԭ��ͼ
5.2 ����·����
M1������綯�����ɽ����Ӵ���KM1���ƣ�ֻҪ������ת�����������ת�ɻ�е�ֱ�������M1װ�������䶥�����������ἰ��������ϵͳ���ȼ̵���FR1�ǹ��ر���Ԫ������·�����������ܵ�Դ�����еĵ���ѿ�װ�á�
M2��ҡ�������綯����װ�����ᶥ�����ýӴ���KM2��KM3��������ת����Ϊ�õ綯����ʱ�乤�����ʲ�����ر���������
M3��Һѹ�ͱõ綯��������������ת���ͷ���ת����������ת�ͷ�����ת��������ֹͣ�ɽӴ���KM4��KM5���ơ��ȼ̵���FR2��Һѹ�ͱõ綯���Ĺ��ر����������õ綯������Ҫ�����ǹ����н�װ��ѹ���ͣ�ʵ��ҡ�ۺ������ļн����ɿ���
M4����ȴ�õ綯�������ʺ�С���ɿ���ֱ��������ֹͣ��
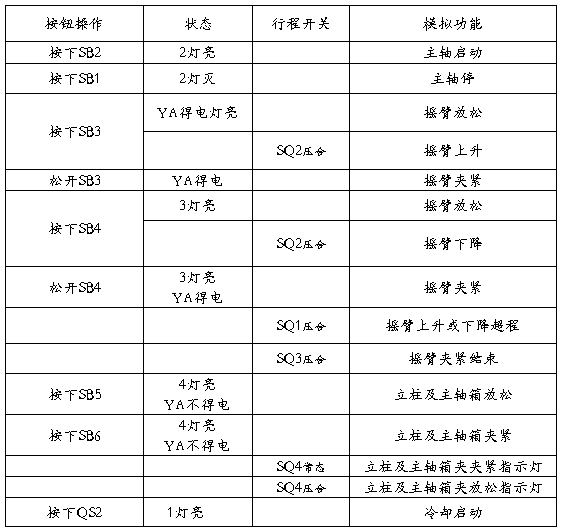
5.3 ���Ƶ�·����
5.3.1 ���綯����ת
��������ťSB2�������Ӵ���KM1���ϲ����������綯��M1��ת����ֹͣ��ťSB1�������Ӵ���KM1�ͷţ����綯��M1ֹͣ��ת��
Ϊ�˷�ֹ���綯����ʱ��������У���·�������ȼ̵���FR1��������ֵӦ������ʱ��M1�Ķ�������е�����
5.3.2 ҡ������
�����������½�����ťSB3��SB4����ʱ��̵���KT���ϣ�ʹ�����Ӵ���KM4�õ����ϣ�Һѹ�õ綯��M3��ת��ѹ���;����䷧����ҡ���ɿ���ǻ���ƶ����������ο�ʹҡ���ɿ���ͬʱ������ͨ������Ƭѹ��λ����SQ2��ʹ�����Ӵ���KM4ʧ���ͷţ������Ӵ���KM2��KM3���õ����ϣ�Һѹ�õ綯��M3ֹͣ��ת�������綯��M2��ת������ҡ�����������½��������ҡ��û���ɿ�����λ����SQ2�������㲻�ܱպϣ������Ӵ���KM2����KM3���Ͳ��ܵõ����ϣ�ҡ�۲�����������ҡ�����������½����������λ��ʱ���ɿ���ťSB3����SB4���������Ӵ���KM2����KM3����ʱ��̵���KTʧ���ͷţ������綯��M2ֹͣ��ת��ҡ��ֹͣ���������½�����
����ʱ��̵���KTʧ���ͷţ���1��3.5����ʱ������ʱ�պϵij��մ���պϣ������Ӵ���KM5�õ����ϣ�Һѹ�õ綯��M3������ת������ѹ���ͣ�ѹ���;����䷧����ҡ�ۼн���ǻ��ʹҡ�ۼн���ͬʱ������ͨ������Ƭѹ��λ����SQ3��ʹ�����Ӵ���KM5ʧ���ͷţ�Һѹ�綯��M3ֹͣ��ת��
�г̿���SQ1��SQ5��������ҡ�۵������г̣���ҡ������������λ��ʱ��SQ1����SQ5�������������Ӵ���KM2����KM3���ϵ磬�����綯��M2ֹͣ��ת��ҡ��ֹͣ������
ҡ�۵��Զ��н�������λ����SQ3�����Ƶġ����Һѹ�н�ϵͳ���ֹ��ϣ������Զ��н�ҡ�ۻ�������SQ3������������ҡ����ֵ������ʹSQ3�ij��մ���Ͽ�������ʹҺѹ�õ綯�����ڳ�ʱ���������״̬�������Ϊ�˷�ֹ��Һѹ�õ綯������·��ʹ���ȼ̵���FR2��������ֵӦ����Һѹ�õ綯��M3�Ķ�������е�����
5.3.3 ��������������ɿ���н�
��������������ɿ���н���ͬʱ���еġ����ɿ�����н�����ťSB5����SB6�������YAʧ�粻���ϣ�Һѹ�õ綯��M3��ת��ת����ѹ���͡�ѹ���;����䷧�����������������ɿ�����н�����ǻ���ƶ����������ο�ʹ������������ֱ��ɿ�����н�����
5.3.4 ��ȴ�õ�������ֹͣ
���ϻ�Ͽ�����QS2���Ϳɽ�ͨ���жϵ�Դ��ʵ����ȴ�õ綯��M4��������ֹͣ��
5.4����������ϵͳ�ĵ��Է���������˵��
��ԭ��ͼ���Ӻõ�·ͼ�ã�ϵͳ�IJ�����һ����Ҫ�Ļ��ڡ��ڽӺú�Ӧ�����水��ԭ��ͼ���м�⿴�����Ƿ���ȷ��������ͨ����в���ϵͳ��������ģ���ϵͳ�У��������£�
�ڶ�ƪ��Z3050ҡ���괲��������ʵϰ����
��������ʵϰ����
�� ���� �Զ���10-1��
�� ���� ������
ѧ �ţ� 3100619102
һ��ʵϰ�����ʡ�Ŀ�ļ�����
�������Ƽ���ʵϰ����ѧϰ���õ�ѹ�����豸������������·�Ļ������ƻ��ڡ����ͻ�������������·���½ڵ�ʵ���Խ�ѧ���ڡ���Ŀ��������ѧ�����ձ�רҵ������Ļ������ܺ�רҵ֪ʶ��ͨ��ѧϰʹѧ����Ϥ�����ո��ֳ��ô�ѹ�����豸�Ĺ��졢����ԭ����ʹ�÷������������յ������ƻ������Ƶ�ԭ�������ӹ������ų�������ѧϰ���û����ĵ������Ƶ���·�ṹ������ԭ�������Ϸ������ų�������ͨ��ʵϰ����ѧ���Ȱ�רҵ���Ȱ��Ͷ����Կ����͡��̿����еľ���
����ʵϰҪ��
1��ѧϰ���õ�ѹ������ʵ��Ӧ�ã����õ������Ƶ�·��ʵ��Ӧ�ã����ֵ綯�����Ƶ�·��Ӧ�ã�
2�����ڽ����Ӵ������ȼ̵�����ʱ��̵�������ť���۶������г̿��ء���ѹ��·���ȳ��õ�ѹ�������а�װ��ʹ�á�ά��ѡ���������
3���������ճ��õ������Ƶ�·�İ�װ���ա����߷���������Ҫ�졢�����̺����ų�������
4���������ճ��û����������Ƶ�·�Ŀ���Ҫ��������ԭ�����������衢�������Ϸ������ų�������
���� ʵϰ������
1�� �˽�Z3050��ҡ���괲�Ļ�е�ӹ����չ��̣���ϤZ3050��ҡ���괲�ĵ������Ƶ�·�Ĺ���ԭ������ȷ��·�и�������Ԫ�������á�
2�� ����Z3050��ҡ���괲�ĵ�������ԭ����·ͼ�������Ԫ��λ��ͼ�͵�������ͼ��
3�� ��Z3050��ҡ���괲�ĵ�������ԭ����·ͼ��ʾ�������еĵ���Ԫ�����г�Ԫ���嵥�������м��顣�ڿ��ư��ϰ�Ԫ��λ��ͼ��װ����Ԫ����
4�� ������ͼ�����߷������а���߲۲��ߺ��ױ����ܡ�
5�� �����ư岼�ߣ���װ�����
6���ӵ���Ͱ�ť������ǵı����ӵ��ߡ��ӵ�Դ���綯���ȿ��ư��ⲿ�ĵ��ߣ��Լ졢�ĺ����ա�
�ġ�Z3050ҡ���괲�ļӹ����ս���
Z3050ҡ���괲��һ�ֵ��͵Ļ�е��Һѹ������һ�廯Эͬ���Ƶ�ͨ�üӹ�������ҡ���괲��ҡ�ۿ���������ת��������������ʽ�괲������������ɷ������ˮƽ���ϵ���λ�ã�ʹ���߶����ӹ������ģ���������̶�������ҡ�ۿ���������ת����������������ҡ������ˮƽ�ƶ������������ڰ�װҡ�ۣ�������������ת�����о������궨λװ�õĹ���̨�����ƶ��������������귽����˶����ɽ�����������������ӹ�ʱ��������תΪ���˶����������ֱ���ƶ�Ϊ�����˶��������������ʱ����ͷһ������ת�˶���һ������������˶�����ʱ��������Ӧͨ���н�װ�ý�����ҡ�۵�ˮƽ�����ϣ�ҡ����������ҲӦͨ���н�װ�ý������������ϡ�ҡ���괲�ĸ����˶��У�ҡ�����������������ƶ�����������ҡ��ˮƽ���������ȷ����ƶ���ҡ����������һ�����������Ļ�ת�˶���������ʽ�괲������������ɷ������ˮƽ���ϵ���λ�ã�ʹ���߶����ӹ������ģ���������̶���������ˣ����ڼӹ�����صĹ����ϵĿ״����ܴ�ķ��㡣ҡ�ۿ���������ת����������������ҡ������ˮƽ�ƶ������������ڰ�װҡ�ۣ�������������ת���������̶��ڵ����ϡ�����ס��Բ�ε��졢���ε������ʽ���б��͡���ǿ�͡����͵Ƚṹ��ҡ���괲�����ڸ����������ס����ס��¿ס����ס������Ƶȼӹ������й���װ����������Ҳ���ۿס�
����Z3050ҡ���괲����ԭ��ͼ
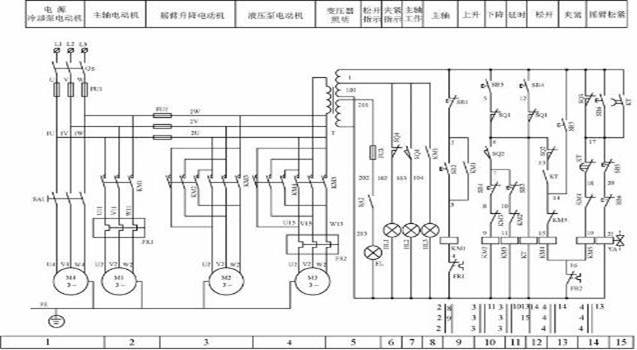
�ġ������������ڽ���
1������·
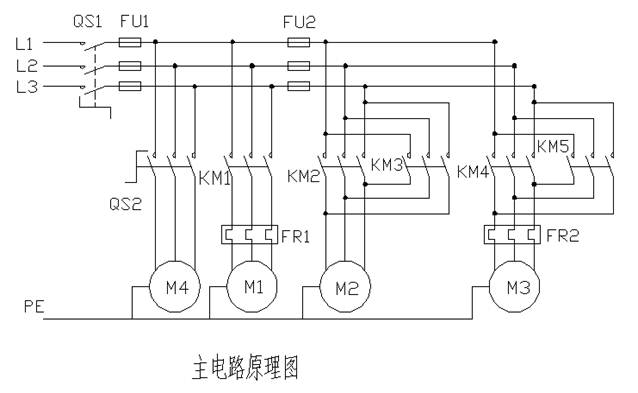
����ͼ�����Դ����բ�����ؽ��۶���FU1����������·���ܶ�·������
�������KM1����ͷ���ƣ�������FR1���й��ر�����FU2����ҡ�۵��M2��Һѹ�õ��M3�Ķ�·������ҡ�������½���M2������ת�ֱ���KM2��KM3���ƣ�Һѹ���ɼӽ����õ��M3������ת��KM4��KM5���ƣ�M3����ر�������FR2��ɡ���Ϊ��ȴ�õ��������С������ֱ����բ������QS2���ƣ�����M2һ��������ر�����
2�����Ƶ�·����

��1���������
��������KM1����ͷ���ƣ��ɵ�·ͼ��֪������������ťSB2���£�KM1��Ȧ�õ磬�γ���������������������ֹͣ��ťSB1ʱ������ͣת��
��2��ָʾ�Ƶ�·
�г̿���SQ4Ϊ�н�������λ���أ���ҡ�۴��ڼн�״̬ʱ��HL1��������ҡ�۷���ʱ��SQ4������HL1����HL2������������ʾ��HL3�ƴ���KM����������ͷ����������������������ֹͣ����
��3��ҡ�������½�
ҡ����������ҡ�۷��ɵ�ʱ�����ʵ�֣����Ե�ҡ�۷��ɵ�λʱ��SQ2������������������ť���ϰ�ťSB3ʱ��KM2��Ȧ�õ磬���ڻ�����KM3���õ磬KT��Ȧͬʱ�õ磬��ʱ��ͷ���϶�����ҡ��������������������λ��ʱ��������λ����SQ1�����ߴﵽҪ��λ���ɿ�SB3��KM2��KT��Ȧʧ��ҡ��ֹͣ��������ʱ��KT��ʼ��ʱ����ʱʱ�䵽����ʱ��ͷ��λ��ʹKM5��Ȧ�õ磬ҡ�ۼн���
�������½���ť���ϰ�ťSB4��KM3Ȧ�õ磬���ڻ�����KM2���õ磬KT��Ȧͬʱ�õ磬��ʱ��ͷ���϶�����ҡ���½������½�������λ��ʱ��������λ����SQ1�����ߴﵽҪ��λ���ɿ�SB4��KM3,KT��Ȧʧ��ҡ��ֹͣ�½���KT��ʼ��ʱ����ʱʱ�䵽����ʱ��ͷ��λ��ʹKM5��Ȧ�õ磬ҡ�ۼн�����ť��Ϊ�㶯���ơ�
��4��Һѹ�÷��ɼн�
Һѹ�õ��ֶ����ɰ�ťΪSB5���н���ťΪSB6��KM4���Ʒ��ɣ�KM5���Ƽн����г̿���SQ3ָʾ�н��Ƿ�λ����ҡ�ۼн���λ������ֶ����ƣ����г̿���SQ3���������ʵ��SB5��SB6�Ĺ��ܡ���SQ3��������SB5��KM4��Ȧ�õ磬���ڻ�����KM5���õ磬ҡ�۷��ɣ�ֱ������ָʾ�г̿���SQ2��������SQ3��������SB6��KM5��Ȧ�õ磬���ڻ�����KM4���õ磬ҡ�ۼн���
��5�����ɼн���ŷ�
���¼�������µ�ŷ��õ磬һ�ǵ��н�����λʱ�����г̿���SQ3����������£���ŷ��õ磻���ǵ�ҡ���������½�ʱ������SB3��SB4��KT�õ�����������KM5����ͨ�磬�Ҳ��ֶ�����Һѹ�÷��ɼн�ʱ�������
�塢ʵϰ�ܽ�
ͨ�����ʵϰʹ��������ʵϰ�����壺ѧϰ���ۺ�ʵ�����ϵ�����õ����ͨ��ʵѵ��ѧ�������˽��������Ҫʲô�����˲ţ��Լ���Ҫ����Ŭ���ŷ�������ʱ����չ����Ҫ��ͨ��ʵѵ������ȫ����֪��������ҵ����λ��Ҫ�߱�ʲô���ܣ��Լ������������Ƿ�����Լ�����Ȥ��������ϣ��Լ������ļ�����Ŭ����Ϊ�Լ�������ְҵ���Ĺ滮���ó�ǰ����������粻���ϣ�����ԭ���Ƿ����ͨ��ʵ���ı䣬����������Ȥ����ʵ��ʧ֮��Զ������ͨ���˴�ʵѵ�ջ�������������ã�ͨ��һϵ�еĹ������̺����������ʵ���ʶ����ϵ�Լ�רҵ���Ƿ��������Լ���רҵ֪ʶ��ͨ�����ʵѵ�����˸о��Լ��������õ���ѧУ��ѧ����֪ʶ��ͨ��ʵѵ������ȫ���˽��Լ����������������Լ����Ը�֮������Щ��Ҫ�Ľ��ĵط���֪���Լ��ʺ�ʲô��ҵ��չ�����������������º�����Э�����������������ߵı�֤ͳһ���Ա���Ӧ���������Ҫ����ʵѵ�����У�����Ҳ�ջ��˿��֡���ͬѧ�Ŀ��֡�����ʦ�Ŀ��֡���Ϊÿ���Լ����Լ���ͬѧ�����һ����Ŀʱ����������Щ��ο����е����ģ���Ϣʱ����ʦ�Ľ���Ҳ��һ�ֿ��֡���Ȼ����ʵѵ���Ǻܳ�ʱ�䣬�����ҽ���ѧϰ�кܴ��������ֻ����㣬�յ������ǻ���һ���ľ��룬���Ի�����Ҫ���Ǽ���Ŭ��ȥ���Ժ��·��������Ҫ���պ�ÿһ�εĻ��ᣬ�����˾���Ҳ�Ҳ������ˡ�
-
�괲��ϳ��ʵϰ����
ʵϰ���棨�ڶ����£����ţ����������������ţ����ڣ�20xx.2.16-20xx.3.15ʵϰ��ʦ��һ��Ŀ¼1.Ŀ¼2.ʵϰĿ��3.��
-
��ʽ����괲���-ʵϰ����
��ҵʵϰ�����ڴ�����һ��ѧԺΪ��ʹ���Ǹ����˽��е��Ʒ�豸��߶Ի�е���켼������ʶ�����е�����ڹ�ҵ������Ӧ�õĸ�����ʶ������Ұ�ˡ�
- Z3050ҡ���괲����ʵϰ����
-
��ʽ˫������괲ʵϰ����
��ѧ����ѧԺʵϰ����ʵϰ������ʶʵϰ�������ѧʵϰ�����ٴ��Ͷ���ҵʵϰ���з�ɢʵϰ��ʽѧ��������ع��ѧ��7011210097רҵ��
-
Z3050ҡ���괲��������ʵϰ����
��������ʵϰ����ѧԺ�༶����ѧ�ο���ʦ��һ��������һZ3050ҡ���괲���ӹ����ս����괲��һ����;�㷺�Ŀӹ���������Ҫ������ͷ�ꡭ
-
��ʵϰ�ܽᱨ��
��ʵϰ�ĵ����ѧԺ������ѧԺרҵ���������̣������༶��20xx��һ���������⺣��ѧ�ţ�20xx115046��ʵϰ�ĵ���ᡰ��
-
̫ԭ������ѧ ��ʵϰ����
��ʵϰ����Xx��xxxʱ��Ҵң���������,ת��Ϊ�����ܵĽ�ʵϰ�����ˡ���ʵϰ�ڼ���Ȼ���ۡ��ܿ࣬����ȴ�е��ܿ��֣���Ϊ������ѧ��
-
��ҵʵϰ����
�к���ҵ�鶼��ҵʵϰ����Ŀ¼1��ʵϰ˵��.............................................��
-
�괲��ϳ��ʵϰ����
ʵϰ���棨�ڶ����£����ţ����������������ţ����ڣ�20xx.2.16-20xx.3.15ʵϰ��ʦ��һ��Ŀ¼1.Ŀ¼2.ʵϰĿ��3.��
- ��ѧ��רҵʵϰ����