汽车尾灯控制器EDA课程设计
《嵌入式技术应用实践(1)》课程设计
-- 汽车尾灯控制器
姓 名: 黄 乐
班级学号: 电信S20##-2-40
指导教师: 徐小鹏
系部名称: 电气工程系
专业名称:电子信息工程技术
湖南工业职业技术学院
20##年6月
任务书
课程设计任务书
目 录
1.引 言. 5
1.1设计的目的. 5
1.2设计的基本内容. 5
1.3 EDA的介绍. 5
1.3.1 EDA技术的概念. 5
1.3.2 EDA技术的特点. 6
1.3.3 EDA设计流程. 6
1.4硬件描述语言(VHDL). 6
1.4.1 VHDL的介绍. 6
1.4.2 VHDL语言的特点. 7
2.总体设计. 8
2.1需求分析. 8
2.2汽车尾灯控制器的工作原理. 8
2.3 汽车运行状态表和总体框图. 9
3.详细设计. 10
3.1各组成模块. 10
3.2时钟分频模块. 10
3.3 汽车尾灯主控模块. 10
3.4左边灯控制模块. 11
3.5右边灯控制模块. 13
4.系统仿真与调试. 14
4.1分频模块仿真及分析. 14
4.2汽车尾灯主控模块仿真及分析. 14
4.3左边灯控制模块仿真及分析. 15
4.4右边灯控制模块仿真及分析. 15
4.5整个系统仿真及分析. 16
4.6 总体设计电路图. 16
5.总结. 17
参考文献. 18
1.引 言
随着社会的发展,科学技术也在不断的进步,状态机的应用越来越广泛。现代交通越来越拥挤,安全问题日益突出,在这种情况下汽车尾灯控制器的设计成为解决交通安全问题一种好的途径。在本课程设计根据状态机原理[1]实现了汽车尾灯常用控制。
1.1设计的目的
本次设计的目的就是通过实践深入理解计算机组成原理,了解EDA技术[2]并掌握VHDL硬件描述语言的设计方法和思想。以计算机组成原理为指导,通过学习的VHDL语言结合电子电路的设计知识理论联系实际,掌握所学的课程知识和基本单元电路的综合设计应用。通过对实用汽车尾灯控制器[3]的设计,巩固和综合运用所学知识,提高IC设计能力,提高分析、解决计算机技术实际问题的独立工作能力。
1.2设计的基本内容
根据计算机中状态机原理,利用VHDL设计汽车尾灯控制器的各个模块,并使用EDA 工具对各模块进行仿真验证。汽车尾灯控制器的设计分为4个模块:时钟分频模块、汽车尾灯主控模块,左边灯控制模块和右边灯控制模块。把各个模块整合后就形成了汽车尾灯控制器。通过输入系统时钟信号和相关的汽车控制信号,汽车尾灯将正确显示当前汽车的控制状态。
1.3 EDA的介绍
1.3.1 EDA技术的概念
EDA是电子设计自动化(Electronic Design Automation)的缩写,在20世纪90年代初从计算机辅助设计(CAD)、计算机辅助制造(CAM)、计算机辅助测试(CAT)和计算机辅助工程(CAE)的概念发展而来的。EDA技术就是以计算机为工具,设计者在EDA软件平台上,用硬件描述语言HDL完成设计文件,然后由计算机自动地完成逻辑编译、化简、分割、综合、优化、布局、布线和仿真,直至对于特定目标芯片的适配编译、逻辑映射和编程下载等工作。
1.3.2 EDA技术的特点
利用EDA技术进行电子系统的设计,具有以下几个特点:① 用软件的方式设计硬件;② 用软件方式设计的系统到硬件系统的转换是由有关的开发软件自动完成的;③ 设计过程中可用有关软件进行各种仿真;④ 系统可现场编程,在线升级;⑤ 整个系统可集成在一个芯片上,体积小、功耗低、可靠性高。因此,EDA技术是现代电子设计的发展趋势。
1.3.3 EDA设计流程
典型的EDA设计流程如下:
1、文本/原理图编辑与修改。首先利用EDA工具的文本或图形编辑器将设计者的设计意图用文本或图形方式表达出来。
2、编译。完成设计描述后即可通过编译器进行排错编译,变成特定的文本格式,为下一步的综合做准备。
3、 综合。将软件设计与硬件的可实现性挂钩,是将软件转化为硬件电路的关键步骤。
4、 行为仿真和功能仿真。利用产生的网表文件进行功能仿真,以便了解设计描述与设计意图的一致性。
5、适配。利用FPGA/CPLD布局布线适配器将综合后的网表文件针对某一具体的目标器件进行逻辑映射操作,其中包括底层器件配置、逻辑分割、逻辑优化、布局布线。适配报告指明了芯片内资源的分配与利用、引脚锁定、设计的布尔方程描述情况。
6、 功能仿真和时序仿真。
7、 下载。如果以上的所有过程都没有发现问题,就可以将适配器产生的下载文件通过FPGA/CPLD下载电缆载入目标芯片中。
8、 硬件仿真与测试。
1.4硬件描述语言(VHDL)
1.4.1 VHDL的介绍
VHDL(Very-High-Speed Integrated Circuit Hardware Description Language)主要用于描述数字系统的结构,行为,功能和接口。除了含有许多具有硬件特征的语句外,VHDL的语言形式和描述风格与句法是十分类似于一般的计算机高级语言。VHDL的程序结构特点是将一项工程设计,或称设计实体(可以是一个元件,一个电路模块或一个系统)分成外部(或称可是部分,及端口)和内部(或称不可视部分),既涉及实体的内部功能和算法完成部分。在对一个设计实体定义了外部界面后,一旦其内部开发完成后,其他的设计就可以直接调用这个实体。这种将设计实体分成内外部分的概念是VHDL系统设计的基本
1.4.2 VHDL语言的特点
1.用VHDL代码而不是用原理图进行设计,意味着整个电路板的模型及性能可用计算机模拟进行验证。
2.VHDL元件的设计与工艺无关,与工艺独立,方便工艺转换。
3.VHDL支持各种设计方法,自顶向下、自底向上或者混合的都可以。
4.可以进行从系统级到逻辑级的描述,即混合描述。
5.VHDL区别于其他的HDL,已形成标准,其代码在不同的系统中可交换建模。
2.总体设计
2.1需求分析
根据现代交通规则,汽车尾灯控制器应满足以下基本要求:
1.汽车正常使用是指示灯不亮
2.汽车右转时,右侧的一盏灯亮
3.汽车左转时,左侧的一盏灯亮
4.汽车刹车时,左右两侧的指示灯同时亮
5.汽车夜间行驶时,左右两侧的指示灯同时一直亮,供照明使用
2.2汽车尾灯控制器的工作原理
汽车尾灯控制器就是一个状态机的实例。当汽车正常行驶时所有指示灯都不亮;当汽车向右转弯时,汽车右侧的指示灯RD1亮;当汽车向左侧转弯时,汽车左侧的指示灯LD1亮;当汽车刹车时,汽车右侧的指示灯RD2和汽车左侧的指示灯LD2同时亮;当汽车在夜间行驶时,汽车右侧的指示灯RD3和汽车左侧的指示灯LD3同时一直亮。通过设置系统的输入信号:系统时钟信号CLK,汽车左转弯控制信号LEFT,汽车右转弯控制信号RIGHT,刹车信号BRAKE,夜间行驶信号NIGHT和系统的输出信号:汽车左侧3盏指示灯LD1、LD2、LD3和汽车右侧3盏指示灯RD1、RD2、
 RD3实现以上功能。系统的整体组装设计原理如图3.1所示。
RD3实现以上功能。系统的整体组装设计原理如图3.1所示。
图2.3整体组装设计原理
2.3 汽车运行状态表和总体框图
汽车尾灯和汽车运行状态表如表1所示。
汽车尾灯和汽车运行状态表1-1

汽车尾灯控制电路设计总体框图如图1所示:
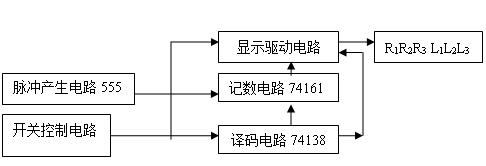
图1 汽车尾灯控制电路设计总体框图
3.详细设计
3.1各组成模块
实现的主要功能是通过开关控制从而实现汽车尾灯的点亮方式。汽车尾灯控制器有4个模块组成,分别为:时钟分频模块、汽车尾灯主控模块,左边灯控制模块和右边灯控制模块,以下介绍各模块的详细设计。
3.2时钟分频模块
整个时钟分频模块的工作框图如图3.2所示。
图3.2时钟分频模块工作框图
时钟分频模块由VHDL程序来实现,下面是其中的一段VHDL代码:
ARCHITECTURE ART OF SZ IS
SIGNAL COUNT:STD_LOGIC_VECTOR(7 DOWNTO 0);
BEGIN
PROCESS(CLK)
BEGIN
IF CLK'EVENT AND CLK = '1'THEN
COUNT <= COUNT + 1;
END IF;
END PROCESS;
CP<= COUNT(3);
END ART;
3.3 汽车尾灯主控模块
汽车尾灯主控模块工作框图如图3.3所示

图3.3 主控模块工作框图
汽车尾灯主控模块由VHDL程序来实现,下面是其中的一段VHDL代码:
ARCHITECTURE ART OF CTRL IS
BEGIN
NIGHT_LED<=NIGHT;
BRAKE_LED<=BAKE;
PROCESS(LEFT,RIGHT)
VARIABLE TEMP:STD_LOGIC_VECTOR(1 DOWNTO 0);
BEGIN
TEMP:=LEFT & RIGHT;
CASE TEMP IS
WHEN "00" =>LP<='0';RP<='0';LR<='0';
WHEN "01" =>LP<='0';RP<='1';LR<='0';
WHEN "10" =>LP<='1';RP<='0';LR<='0';
WHEN OTHERS=>LP<='0';RP<='0';LR<='1';
END CASE;
END PROCESS;
END ART;
3.4左边灯控制模块
左边灯控制模块的工作框图如图3.4所示。
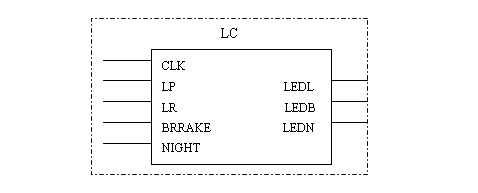
图3.4左边灯控制模块的工作框图
左边灯控制模块由VHDL程序来实现,下面是其中的一段VHDL代码:
ARCHITECTURE ART OF LC IS
BEGIN
LEDB<=BRAKE;
LEDN<=NIGHT;
PROCESS(CLK,LP,LR)
BEGIN
IF CLK'EVENT AND CLK = '1' THEN
IF(LR ='0')THEN
IF(LP = '0')THEN
LEDL<='0';
ELSE
LEDL<='1';
END IF;
ELSE
LEDL <='0';
END IF;
END IF;
END PROCESS;
END ART;
3.5右边灯控制模块
右边灯控制模块的工作框图如图3.5所示
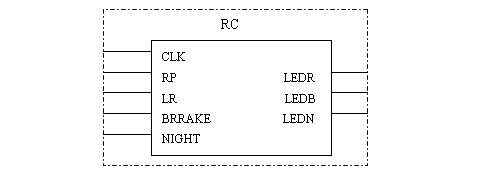
图3.5 右边灯控制模块的工作框图
右边灯控制模块由VHDL程序来实现,下面是其中的一段VHDL代码:
ARCHITECTURE ART OF RC IS
BEGIN
LEDB<=BRAKE;
LEDN<=NIGHT;
PROCESS(CLK,RP,LR)
BEGIN
IF CLK'EVENT AND CLK = '1' THEN
IF(LR = '0')THEN
IF(RP = '0')THEN
LEDR <='0';
ELSE
LEDR <= '1';
END IF;
ELSE
LEDR <='0';
END IF;
END IF;
END PROCESS;
END ART;
4.系统仿真与调试
4.1分频模块仿真及分析
分频模块由VHDL程序实现后,其仿真图如图4.1所示

图4.1 分频模块仿真图
对其仿真图进行仿真分析:如图所示,首先生成一个600ns的时钟脉冲,通过时钟分频把600ns的脉冲分成一个40ns的脉冲,实现了信号同步。
4.2汽车尾灯主控模块仿真及分析
汽车尾灯主控模块由VHDL程序实现后,其仿真图如图4.2所示。

图4.2主控模块时序仿真图
对时序仿真图进行分析:RIGHT,LEFT,NIGHT,BRAKE 为输入信号,RIGHT为1表示右转,LEFT为1表示左转,NIGHT为1表示夜间行路,BRAKE为1表示刹车。RP,LP,NIGHT_LED,BRAKE_LED为输出信号。如图所示:当RIGHT为1时,产生一个RP为1的信号脉冲输出,当LEFT为1时,产生一个LP为1的信号脉冲输出,当NIGHT为1时,产生一个NIGHT_LED为1的信号脉冲输出。当BRAKE为1时,产生一个BRAKE_LED为1的信号脉冲输出。
4.3左边灯控制模块仿真及分析
左边灯控制模块由VHDL程序实现后,其仿真图如下图4.3所示。
对时序仿真图进行分析:LP,LR,NIGHT,BRAKE 为输入信号,LP为1表示左转,LR为1表示右转,NIGHT为1表示夜间行路,BRAKE为1表示刹车。LEDL,LEDB,LEDN为输出信号,表示汽车左侧的三盏灯。如图所示:当LP为1时,LEDL输出为1表示左侧灯亮,当BRAKE为1时,LEDB输出为1表示左侧灯亮,当NIGHT为1时,LEDN输出为1表示左侧灯亮。当LR为1时,左侧三盏灯输出均为0。即没有灯亮。
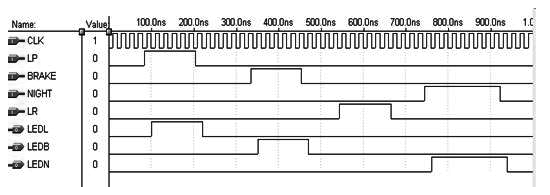
图4.3左边灯控制模块时序仿真图
4.4右边灯控制模块仿真及分析
右边灯控制模块由VHDL程序实现后,其仿真图如图4.4所示。
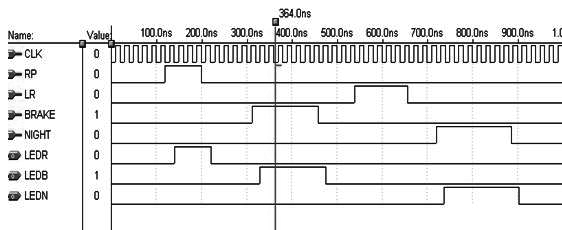
图4.4 右边灯控制模块时序仿真图
对时序仿真图进行分析:RP,LR,NIGHT,BRAKE 为输入信号,LR为1表示左转,RP为1表示右转,NIGHT为1表示夜间行路,BRAKE为1表示刹车。LEDR,LEDB,LEDN为输出信号,表示汽车右侧的三盏灯。如图所示:当RP为1时,LEDR输出为1表示右侧灯亮,当BRAKE为1时,LEDB输出为1表示右侧灯亮,当NIGHT为1时,LEDN输出为1表示右侧灯亮。当LR为1时,右侧三盏灯输出均为0。即没有灯亮。
4.5整个系统仿真及分析
按图2.3组装系统后的仿真图如下图4.5所示。
对时序仿真图进行分析:RIGHT,LEFT,NIGHT,BRAKE 为输入信号,RIGHT为1表示右转,LEFT为1表示左转,NIGHT为1表示夜间行路,BRAKE为1表示刹车。RD1,RD2,RD3为输出信号,表示汽车右侧的三盏灯。LD1,LD2,LD3为输出信号,表示汽车左侧的三盏灯。如图所示:当RIGHT为1时,RD1输出为1表示右侧灯亮,当LEFT为1时,LD1为输出为1表示左侧灯亮,当NIGHT为1时,LD2,RD2输出均为1,表示左,右两侧各有一盏灯亮。当BRAKE为1时,LD3,RD3输出均为1,表示左,右两侧各有一盏灯亮。

图4.5 整个系统仿真图
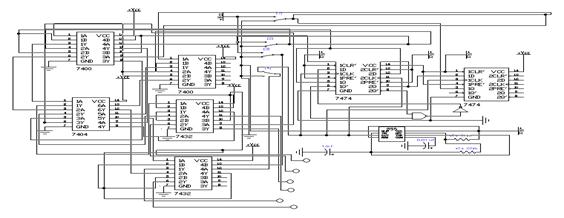 4.6 总体设计电路图
4.6 总体设计电路图
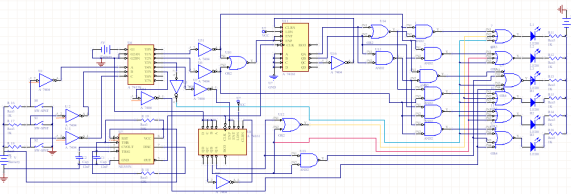
图4.6总体设计电路图
5.总结
通过这次汽车尾灯控制器的设计,加强了我的动手、思考和解决问题的能力。现在设计已经做好了,自己感觉还是比较好的,虽然花了一定的时间,但学到了很多东西。做课程设计的时候,自己把整个书本都看了几遍,增强了自己对知识的理解,很多以前不是很懂的问题现在都已经一一解决了。在应用VHDL的过程中让我真正领会到了其并行运行与其他软件顺序执行的差别及其在电路设计上的优越性。用VHDL硬件描述语言的形式来进行数字系统的设计方便灵活,利用EDA软件进行编译优化仿真极大地减少了电路设计时间和可能发生的错误,降低了开发成本,这种设计方法必将在未来的数字系统设计中发挥越来越重要的作用。在连线过程中,经常会遇到一些问题,比如接错线,无意中删除了一些线等,使自己感觉到有点力不从心。从开始做课程设计那天起,脑中天天都想着同样的问题,怎么去接线,怎么去把电路弄得更加简单,怎么做得别人更容易看懂。
总体来说,这次实践使我受益匪浅。在摸索该如何设计电路使之实现所需功能的过程中,特别有趣,培养了我的设计思维,增加了实际操作能力。在让我体会到了设计电路的艰辛的同时,更让我体会到成功的喜悦和快乐。希望学校以后多安排一些类似的实践环节,让同学们学以致用。
参考文献
[1] 王爱英 计算机组成与结构 北京:清华大学出版社,2001.2,
[2] 黄仁欣 EDA技术实用教程 北京:清华大学出版社,2006
[3] 曹昕燕,周凤臣,聂春燕 EDA技术实验与课程设计 北京:清华大学出版社,2006.5
[4] 杨亦华,延明 数字电路EDA入门 北京:北京邮电大学出版社,2003
[5] 彭容修,《数字电子技术基础》, 武汉,武汉理工大学出版社,2005
[6] 潘松 ,黄继业《EDA技术与VHDL》,北京,清华大学出版社,2006
-
可编程控制器应用课程设计报告
青岛农业大学可编程控制器应用课程设计报告20xx20xx学年第1学期题目塔吊的PLC控制系统设计姓名学号专业班级指导老师20xx年…
-
可编程控制器技术课程设计报告
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信工程专业:通信工程年级:061班姓名:**学号:…
-
可编程控制器课程设计报告
可编程控制器课程设计报告题目:基于PLC的自动洗衣机控制系统设计年级:2009级班级:自动化1班姓名:王**学号:**指导教师:张…
-
可编程控制器课程设计
可编程控制器课程设计中央空调的设计一前言我国是一个人均能源相对贫乏的国家人均能源占有量不足世界水平的一半随着我国经济的快速发展我国…
-
电气控制及可编程控制器课程设计报告
扬州大学水利与能源动力工程学院本科生课程设计课程:电气控制及可编程控制器课程设计专业:建筑电气与智能化班级:建电1102班学号:姓…
-
汽车尾灯控制实验报告
武汉工程大学计算机科学与工程学院综合设计报告设计名称数字系统综合设计设计题目汽车尾灯逻辑控制电路设计学生学号专业班级学生姓名学生成…
-
汽车尾灯控制电路实验报告
20xx级模拟电子技术课程设计数字电子技术课程设计报告书课题名称姓名汽车尾灯模拟控制电路设计陈景玉学号20xx6434院系部专业指…
-
数电课程设计——汽车尾灯控制电路论文
一设计要求假设汽车尾部左右两侧各有3个指示灯用发光二极管模拟1汽车正常运行时指示灯全灭2右转弯时右侧3个指示灯按右循环顺序点亮3左…
-
汽车尾灯设计数电实验报告
课程设计报告数字电子技术题目汽车尾灯控制器的设计院系机电工程学院专业电子科学与技术学号20xx0661104学生姓名刘乾坤指导教师…
-
汽车尾灯课程设计报告
课程设计报告课程名称电子技术课程设计设计题目汽车尾灯控制器专业电气工程及其自动化班级20xx学号20xx0240315学生姓名李博…