运动控制系统实验报告
运动控制系统实验报告
运动控制仿真实验报告
一、实验内容与要求
1.单闭环转速负反馈
2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建
具体要求:针对1 2
(1)仿真各环节参数
(2)仿真模型的建立
(3)仿真结果,分为空载还是负载,有无扰动
(4)仿真结果分析
二、Simulink环境下的仿真
1.单闭环转速负反馈
1.1转速负反馈闭环调速系统仿真各环节参数
直流电动机:额定电压 =220V,额定电流
=220V,额定电流 =55A,额定
=55A,额定 =1000r/min ,电动机电动 势系数
=1000r/min ,电动机电动 势系数 =0.192V·min/r。
=0.192V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数 =44,滞后时间常数
=44,滞后时间常数  =0.00167s。
=0.00167s。
电枢回路总电阻R=1.0Ω,电枢回路电磁时间常 =0.00167s,电力拖动统机电时间 常数
=0.00167s,电力拖动统机电时间 常数 =0.075s。
=0.075s。
转速反馈系数α=0.01V·min/r。
对应额定转速是的给定电压 =10V。
=10V。
 1.2仿真模型的建立
1.2仿真模型的建立
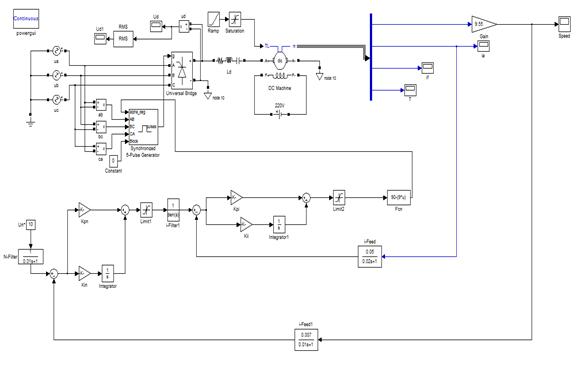
图1-1单闭环转速负反馈直流调速系统的仿真模型

 PI调节器的值定为 =0.56, = 11.43。
PI调节器的值定为 =0.56, = 11.43。
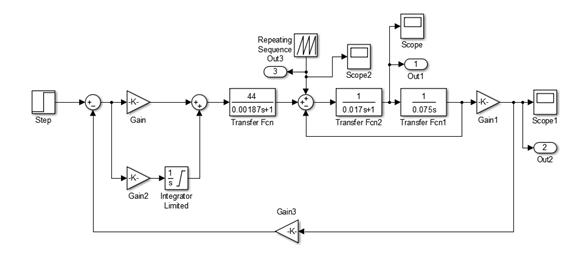
图1-2单闭环转速负反馈直流调速系统加入扰动负载时的仿真模型
1.3仿真结果
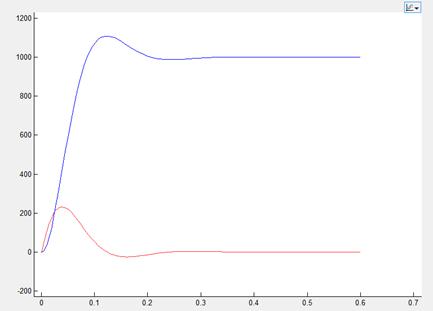
图1-3空载启动不加扰动转速和电流波形
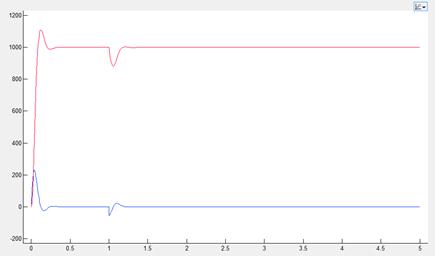
图1-4空载启动加负载扰动转速和电流波形
 1.4仿真结果分析
1.4仿真结果分析
(1)空载启动无扰动:由空载启动不加扰动转速和电流波形可知,当 =0.56, = 11.43。系统转速有较大的超调量,但快速性较好的。空载启动电流的最大值有230A左右,而额定电流=55A,远远超过了电动机承受的最大电流。
(1)空载启动加负载扰动:由空载启动加负载扰动转速和电流波形可知,在空载启动1S后加负载扰动,在1S到1.5S时间段,转速和电流有明显的下降,但系统马上进行了调节。
2. 转速电流双闭环负反馈
2.1转速负反馈闭环调速系统仿真各环节参数
直流电动机:额定电压=220V ,额定电流=136A,额定转速 =1460r/min ,电动机电动势系数=0.132V·min/r,允许过载倍数λ=1.5;假使晶闸管整流装置输出电流可逆,装置的放大系数=40,电枢回路总电阻R=0.5Ω电枢回路电磁时间常数=0.03s,电力拖动系统机电时间 常数=0.18s电流反馈系数β=0.05V/A(≈10V/1.5 )。滞后时间常数=0.0017s。转速反馈系数α=0.007V·min/r。对应额定转速是的给定电压=10V。
)。滞后时间常数=0.0017s。转速反馈系数α=0.007V·min/r。对应额定转速是的给定电压=10V。
2.2仿真模型的建立
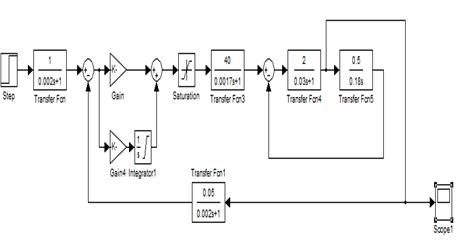
图2-1电流环的仿真模型
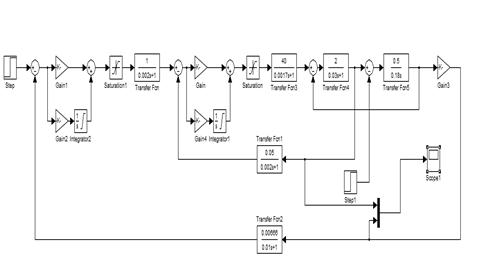
图2-2转速环的仿真模型
2.3仿真结果
(1)空载时候设计按典I系统(KT=0.5)设计方法得到仿真结果:
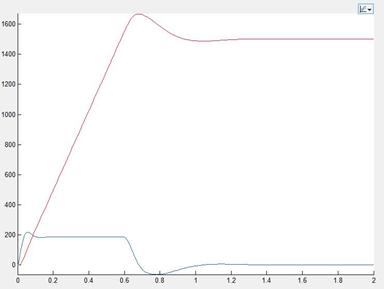
图2-3空载无扰动波形
(2)转速环满载高速启动时,减负载扰动仿真结果:
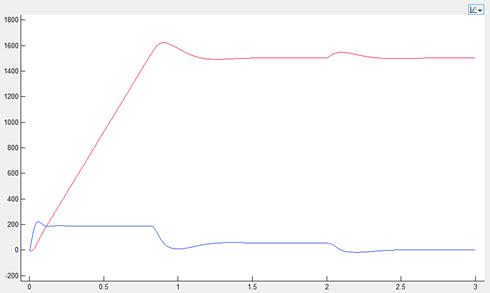
图2-4满载启动减负载扰动波形
2.4 仿真结果分析
由图2-3空载无扰动波形可知,转速电流双闭环系统,空载时负载电流为零,ASR调节器经过了不饱和,饱和,退饱和三个阶段,进过系统调节最后稳定运行于给定转速。
由图2-4满载启动减负载扰动波形可知,在满载的情况下突减负载扰动,可以看出转速环能马上进行调节回到稳定,而电流环只能慢慢回到稳定。说明对负载扰动来说,转速环能有效的调节,而电流环起不到调节作用。
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建
仿真模型
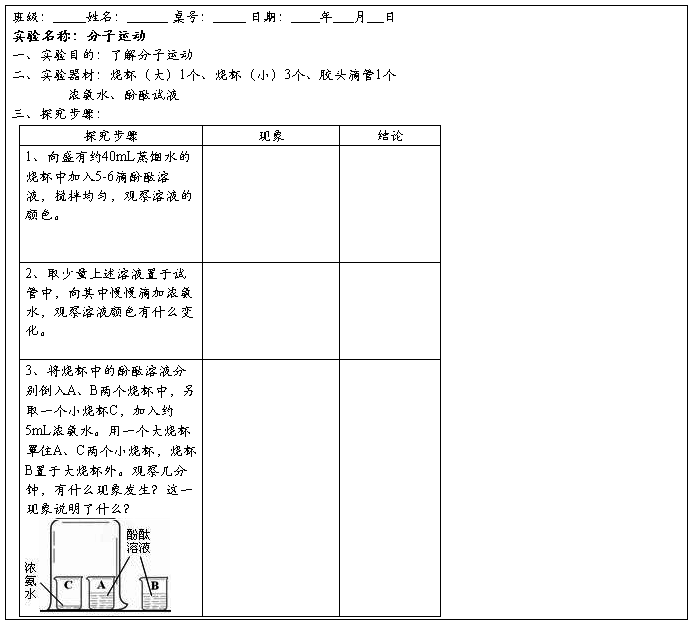
第二篇:氨分子运动实验报告
化学实验报告
-
运动控制系统实验报告
实验一晶闸管直流调速系统电流转速调节器调试一实验目的1熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求2掌握直流调速…
-
运动控制系统实验报告
专业班级学号姓名学院名称运动控制仿真实验报告一实验内容与要求1单闭环转速负反馈2转速电流双闭环负反馈3晶闸管相控整流双闭环直流调速…
- 运动控制实验报告
- 运动控制系统专题实验报告表格
-
电力系统远动原理实验报告
电力系统远动原理实验报告实验名称厂站终端特性分析电气信息学院级任课教师一实验名称厂站终端特性分析二实验目的1了解厂站终端的作用厂站…
-
C++课程设计报告 运动会分数统计系统
C++课程设计报告运动会分数统计系统一.需求分析1问题描述运动会分数统计系统参加运动会有n个系,系编号为1n。比赛分成m个男子项目…
-
电机与运动控制系统_实验报告2
实验报告课程名称电机与运动控制系统实验第3次实验实验名称直流他励电动机在各种运行状态下的机械特性实验时间20xx年xx月xx日实验…
- 管理信息系统实验报告
-
管理信息系统实验报告
实验项目企业信息化及实验地点经管系机房T301实验日期20xx年6月15日实验项目电子商务系统设计实验地点经管系机房T301实验日…
-
机电系统创新与实践实验报告
机电系统创新与实践实验报告班级01311001学号1120xx0151姓名刘峰慧鱼探索者机器人一实验目的1认识了解慧鱼探索者机器人…
-
运动会计分系统程实验设计报告
重庆文理学院计算机科学与技术专业数据结构课程设计报告题目运动会计分系统班级14级计算机科学与技术姓名张超学号21458274042…