电力系统远动原理实验报告
电力系统远动原理
实验报告
实验名称:厂站终端特性分析
电气信息学院 级
任课教师:
一. 实验名称
厂站终端特性分析
二.实验目的
1. 了解厂站终端的作用:厂站终端RTU是调度自动化系统中一个重要的组成部分,它能提供给调度主机关于电网的遥测和遥信信息,并能执行有调度主机发出的遥控和遥调命令;此外,还完成与主机间的通信功能。
2. 了解厂站终端的结构和特点;
3. 了解厂站终端的主要功能;
4. 了解厂站终端与当地监控主机通信过程和规约。
三.实验要求
1. 已对调度教材中有关调度自动化系统的结构和功能章节进行了学习,已对远动教材中有关远动系统的结构和功能章节进行了学习,建立了基本概念。
2. 实验前认真阅读实验指导书;实验中,根据实验内容,做好实验记录;实验后,写出实验报告。
3. 严格按照教师的指导进行操作。
4. 认真上机操作,建立感性认识。
四.系统结构:
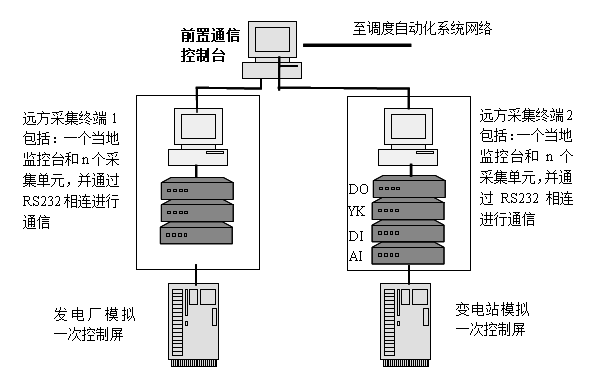
图6-1 系统结构
1. 控制量输出终端DO
(1) 结构
 图6-2 控制量输出终端DO 前面板
图6-2 控制量输出终端DO 前面板
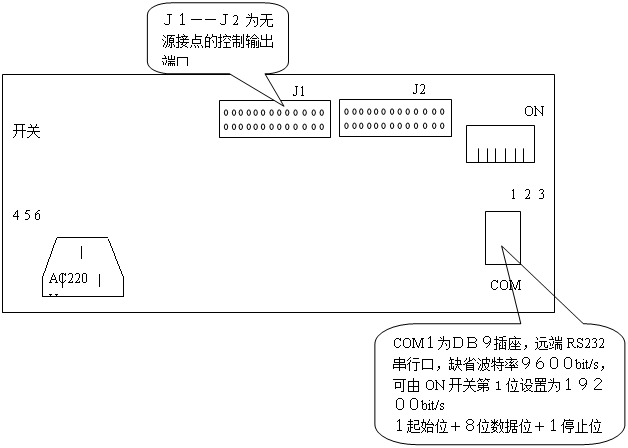
 图6-3 控制量输出终端DO后面板
图6-3 控制量输出终端DO后面板
(2) 技术参数
Ø 输出:二个串行口( COM0 ,COM1 )
ü COM0:本地设置口,RS—232串口,波特率9600bit/s,
1起始位+8位数据位+1停止位;
ü COM1:远端串行口,RS—232串口,波特率9600bit/s或 19200bit/s 可调
1起始位+8位数据位+1停止位;
Ø 控制输出无源接点:12路无源接点输出
2. 控制操作箱YK
(1) 结构

图6-4 控制操作箱YK前面板

图6-5 控制操作箱YK后面板
(2) 技术参数
Ø 输入:24路
Ø 输出:24路
Ø 功能`:可手动控制和遥控两种方式
3. 开关量采集终端DI
(1) 结构
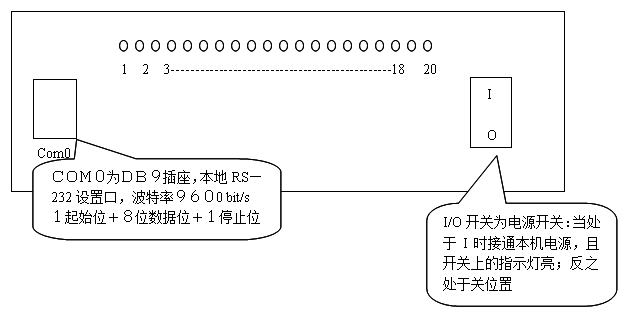
图6-6 开关量采集终端DI前面板
(2) 技术参数
Ø 输入: 12路开关量
Ø 输出:二个串行口( COM0 ,COM1 )
ü COM0:本地设置口,RS—232串口,波特率9600bit/s,
1起始位+8位数据位+1停止位;
ü COM1:远端串行口,RS—232串口,波特率9600bit/s或 19200bit/s 可调
1起始位+8位数据位+1停止位;
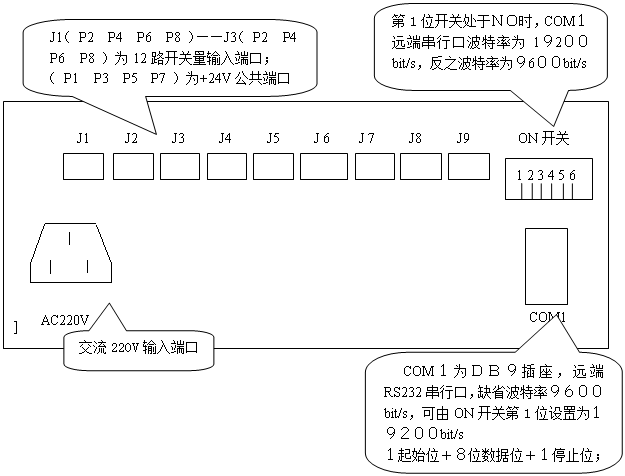
图6-7 开关量采集终端DI后面板
4. 模拟量采集终端AI
技术参数
Ø 包括两组单元。每组单元采集1路V,6路I并计算对应的P、Q值。(每路有A、B、C三相)
Ø 计算每组单元中V的A相频率。
Ø 通过串行口向PC发送信息。
Ø 标称值:
终端输入V:相电压220/57.74V 整定553
终端输入I: ~ 5A 整定1009
Ø 通信: 串行口
规约:CDT
速率:9600bps
五.系统功能
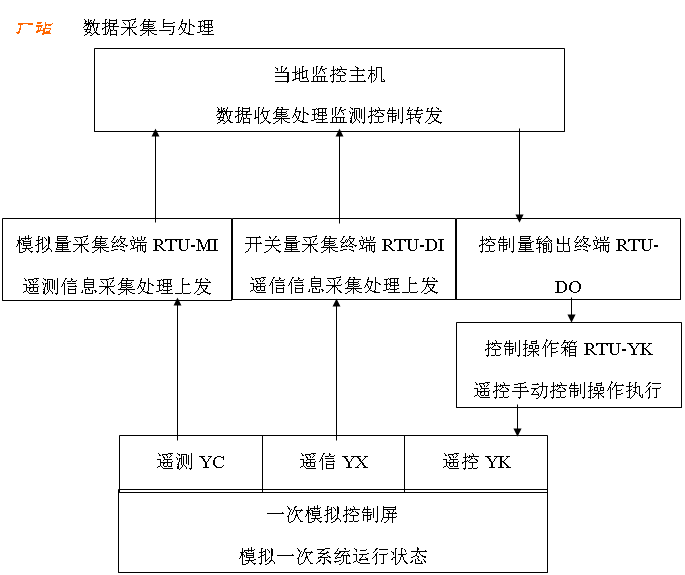
图6-8 系统功能
六.实验步骤及内容
1. 对远方采集终端设备的结构和功能进行了解
(1) 结合前述系统结构和功能介绍,对远方采集终端进行实物对照了解;
(2) 分析各终端的结构功能。
2. 启动厂站系统
(1) 启动发电厂、变电站一次模拟屏和远方采集终端RTU;
(2) 启动当地监控主机;
(3) 观察当地监控主机启动情况;
(4) 当地监控主机进入主界面。

图6-9 发电厂主界面
3. 发电厂数据采集
(1) 观察发电厂当地监控主界面;
(2) 分析并记录采集的遥测信息;
(3) 分析并记录采集的遥信信息;
(4) 通过手动控制开关开断,观察一次模拟屏上对应开关的状态变化, 观察主界面遥信数据的变化;
(5) 分析手动操作开关开断的步骤及注意事项。
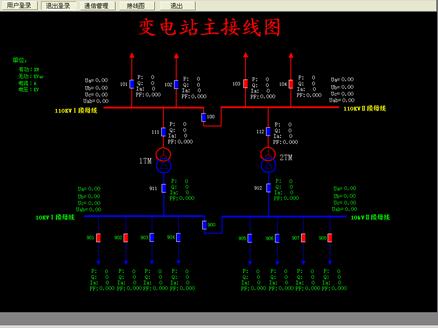
图6-10 变电站主界面
4. 变电站数据采集
(1) 观察变电站当地监控主界面;
(2) 分析并记录采集的遥测信息;
(3) 分析并记录采集的遥信信息;
(4) 通过手动控制开关开断,观察一次模拟屏上对应开关的状态变化,观察主界面遥信数据的变化;
(5) 分析手动操作开关开断的步骤及注意事项。
5. 发电厂、变电站遥控操作
(1) 发电厂只有902、912、112、103回路带遥控功能;
(2) 变电站只有101、111、911、903回路带遥控功能;
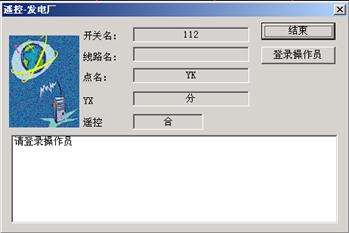
图6-11 遥控对话框
(3) 把鼠标放在对应回路开关图标上,鼠标变成手形,点击图标,弹出 “遥控”对话框;
(4) 在“遥控”对话框的下方,显示操作步骤,以及执行操作的结果;
(5) 任何遥控操作,都需要先登陆操作员。点击出现“登陆操作员”对话框,可以选择操作员登陆;登陆后,对话框变为下图所示:
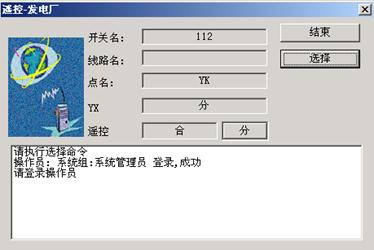
图6-12 遥控对话框
(6) 单击“选择”按钮,操作成功后,对话框中将增加“执行”、“撤消”按钮;
(7) 单击“执行”按钮,执行遥控命令;
(8) 单击“撤消”按钮,取消遥控命令;
(9) 分析遥控命令格式及含义。
七.特性及特点分析
1. 本实验中,变电站远方采集终端与当地监控主机间的通信采用现场总线方式,Modbus规约。
2. 遥信模块和遥控模块安装在变电站RTU柜中,对发电厂遥信信息的采集和遥控命令的输出均通过变电站当地监控主机完成,变电站监控主机与发电厂监控主机的的通信采用POLLING通信方式,规约为IEC870-5-101。
3. RTU与主站前置通信控制台间采用POLLING通信方式,规约为IEC870-5-101。这种通信方式使主机的通信任务更加主动,主机可以根据需要查询RTU的信息或下发命令。为了提高系统的实时性,遥信变位或遥测越限可主动上发,减少了主机的通信负担。
八.分析总结
1. 远方采集终端的结构和组成。
远方采集终端RTU由一个当地监控台和n个采集单元组成,并通过RS232相连进行通信。包括控制量输出终端DO、控制操作箱YK、开关量采集终端DI和模拟量采集终端AI。
2. 远方采集终端的功能。
远方采集终端有如下功能:
(1)采集状态量并向远方发送,带有光电隔离,遥信变位优先传送;
(2)采集数据量并向远方发送,带有光电隔离;
(3)直接采集系统工频电量,实现对电压、电流、有功、无功的测量并向远方发送 ,可计算正反向电度;
(4)采集脉冲电度量并向远方发送,带有光电隔离;
(5)接收并执行遥控及返校;
(6)程序自恢复;
(7)设备自诊断(故障诊断到插件级);
(8)设备自调;
(9)通道监视;
(10)接收并执行遥调;
(11)接收并执行校时命令(包括GPS对时功能 选配);
(12)与两个及两个以上的主站通讯;
(13)采集事件顺序记录并向远方发送;
3. 远方采集终端四遥功能的实现。
(1) 遥测:将远方站的各种测量值传送到主站端。遥测的主要技术指标是模拟转器的准确度、分辨率、温度稳定性。一般要求准确度在±0.1~±0.5%;分辨率为10或12±1位。 数字量的字长则根据被测对象的要求而定。遥测量一般有模拟量、数字量、脉冲计数量和其他测量值。
(2) 遥信:将远方站内电工设备的状态以信号的两种状态即0、1(或断开、闭合)传送主站端(调度端)。遥信反映的内容主要有断路器和隔离开关的位置,继电保护的动作状态,报警信号,自动控制的投、切,发电厂、变电所的事故信号,电工设备参数的越限信号,以及远方站远动设备的状态、自诊断信号等。遥信的传送有变位传送和循环传送两种,以变位传送为优。为避免发生信号丢失,在远动设备初投入运行时,需将全部内容向主站端传送,使主站端安全监控系统内的数据库的内容和模拟盘的信号状态准确反映系统内运行设备的状态。在平时定期传送全部信号。
(3) 遥调:由主站端向远方站发送调节命令,远方站经过校验后转换成适合于被控对象的数据形式,驱动被调对象。
发送的调节命令可以采取返送校核,也可以不采取返送校核,远方站接受遥调命令后直接执行。遥调命令有两种形式:①设定值形式。由主站端向远方站发送控制被控对象的一个数值,远方站接受后或者以数字形式直接输出,或者经数/模转换器将数字量转换成被控对象所需要的模拟量形式输出。②升降命令形式。将主站端发送过来的升/降调节命令,转换成升/降的步进信号,用以调节发电机的出力或者变压器的分接头的位置以及水电厂的闸门。实现遥调可以采取局部反馈调节的方式,即主站端定时发送调节命令后,由被调对象的自动调节设备来完成调节过程;也可以采用大反馈调节方式,即将被调节对象的信息反馈到主站端来进行反馈平衡,决定是否继续发送调节命令。一般采取前一种形式较多。
(4) 一般采用选择—返送校验—执行的过程。在调度员发送命令时,首先应该校核该被控制站和被控制的设备在正常运行,系统或变电所没有发生事故和警报,所发出的命令符合被控设备的状态。在主站端校验正确后,方能向远方站发送命令。命令被送到远方站以后,经过差错控制的校核,确认命令没有受到干扰。远方站收到命令后,应先检查输出执行电路没有接点处于闭合状态;然后将正确接收的命令输出,同时将输出命令的状态反编码送到主站端;在主站端将接收到的返送校核码进行比较。在返送校核无误后,将结果显示给调度人员,并向远方站发送执行命令。此时由执行命令将输出执行电路的电源合上,驱动执行电路操作对象动作。被控制的对象动作后,过一定时间还要检查有关电路是否有接点粘上,并将动作结果告知主站,过一定时间将电路电源自动切除。只有这样严格的技术措施,才能保证遥控的正确无误。对于电力系统,遥控的技术指标是执行的正确动作率为100%。
4. 远方采集终端与监控主机的通信规约。
本实验中,变电站远方采集终端与当地监控主机间的通信采用现场总线方式,Modbus规约。
九.心得体会
为了保证电力系统安全稳定地运行,保证电能质量和系统运行的经济性,电力系统的运行都是由各级调度指挥的。对于复杂电力系统,只凭借人来对各种运行中出现的问题进行处理是很难的,因此必须借助一些技术手段来掌握系统的运行状态和对系统进行迅速有效的控制。而这些功能,就是电力系统远动所实现的。
要实现这些功能,就需要有数据以供分析。这些运行状态信息和数据,如遥信信息、遥测信息、遥控信息、遥调信息就来自厂站终端的RTU的信息采集。
在本次实验的过程中,我和同学们根据实验手册上的步骤和要求,认真实验。了解厂站终端的结构特点和主要功能、了解厂站终端与当地监控主机通信过程和规约、了解了厂站终端的作用——厂站终端RTU是调度自动化系统中一个重要的组成部分,它能提供给调度主机关于电网的遥测和遥信信息,并能执行有调度主机发出的遥控和遥调命令。此外,还完成与主机间的通信功能。
在实验过程中遇到不懂的问题,我积极思考并且和同学讨论。总之,通过这次的实验我不但对课本上有关RTU的知识有了更进一步的理解,对于实际的操作过程也有了一定的了解。
第二篇:物理演示实验报告
实验标题: 混沌摆实验
实验目的:
通过摆的运动演示该力学系统的混沌性质。
实验步骤:
手持轴柄给系统施一力矩,系统开始运动,运动情况复杂,前一时间难于预言后一时刻的运动状态。重新启动,由于起始冲量矩总有所不同,系统的运动情况差别很大,这反映了系统运动的混沌性质。
实验原理:
一个动力学系统如果描述他的运动状态的动力学方程是线性的,运动状态由起动时的初始条件(主、副摆的初始位置和起动速度)所决定,只要初始条件给定,就可预见以后任意时刻的运动状态。单摆的运动很容易预测,但我们的混沌摆系统,由于这个大摆有三个小摆与之相连,描述它的运动状态的动力学方程是非线性的,具有内在的随机性,它的运动状态对初始条件具有很强的敏感性,它的运动就更为复杂,其中每个摆都会影响其它摆的运动,系统运动的外观表现是随机的,是一种貌似无规律的运动,因而使整个运动混沌无序,无法预测 注意事项:
转动时不要用力过大,以防混沌摆转动时间过长。
实验感想:
在做完混沌摆的实验之后,我深深地为物理的神奇感到震撼。在我们以前接触的物理学知识以及生活常识中,我们对一个运动一般都可以大致预测到它在之后的运动情况,然而混沌摆打破了这个常识为何简单的模型可以有如此复杂的运动情况?这是不是真的如它的名字一般,拥有“混沌”特性?在老师的讲述中,似乎混沌摆的原理至今还没有被探究清楚,这不禁令我想到了一本很热门的科幻小说《三体》。同样的是无法预测的运动,同样的无法用数学模型描述,三体运动是否和混沌摆有着相似的原理?是否都拥有“混沌”特性?这将指引着我们继续探究下去。
-
电力系统自动化实验报告
学院专业班级学号姓名指导老师完成时间电力系统自动化报告核技术与自动化学院电气工程及其自动化20xx060505班320xx0605…
-
电力系统实验报告
电力系统实验报告班级学号姓名实验一同步发电机准同期并列实验一实验目的1加深理解同步发电机准同期并列原理掌握准同期并列条件2掌握微机…
-
电力系统实验报告
单机无穷大系统稳态实验一整理实验数据说明单回路送电和双回路送电对电力系统稳定运行的影响并对实验结果进行理论分析实验数据如下由实验数…
-
电力系统实验报告
重庆邮电大学移通学院自动化系电力系统自动化及其微机保护实验专业电气工程及其自动化班级05111001学号0511100104姓名刘…
-
电力系统分析实验报告
电力系统分析实验报告实验项目1单机无穷大系统稳态运行实验2电力系统暂态稳定实验学院电气信息学院专业电气工程及其自动化班级20xx级…
-
C++课程设计报告 运动会分数统计系统
C++课程设计报告运动会分数统计系统一.需求分析1问题描述运动会分数统计系统参加运动会有n个系,系编号为1n。比赛分成m个男子项目…
-
电机与运动控制系统_实验报告2
实验报告课程名称电机与运动控制系统实验第3次实验实验名称直流他励电动机在各种运行状态下的机械特性实验时间20xx年xx月xx日实验…
- 管理信息系统实验报告
-
管理信息系统实验报告
实验项目企业信息化及实验地点经管系机房T301实验日期20xx年6月15日实验项目电子商务系统设计实验地点经管系机房T301实验日…
-
机电系统创新与实践实验报告
机电系统创新与实践实验报告班级01311001学号1120xx0151姓名刘峰慧鱼探索者机器人一实验目的1认识了解慧鱼探索者机器人…
-
运动会计分系统程实验设计报告
重庆文理学院计算机科学与技术专业数据结构课程设计报告题目运动会计分系统班级14级计算机科学与技术姓名张超学号21458274042…