机械原理游戏机
机械原理课程设计
题目:____游戏机_______
姓名:____朱建杰_______
班级:12级机械设计制造及其自动化(1)班
学号:__0802120141_____
指导教师:_刘凌__
20##年6月26日
任 务 书
题目: 游戏机 同组成员:赵磊、王鹏 指导教师:刘凌
某游乐场欲添设一新的游乐项目,该项目是在一暗室中,让一画有景物的屏幕(观众可以看见屏幕上的景物),由静止逐渐开始左右晃动,由于观众在暗室中仅能看见屏幕上的景物,根据相对运动原理,观众将产生一个错觉,他不认为是屏幕在晃动,反而认为是自己在晃动,这是一个有惊无险的游乐项目。
现要求设计一机械传动装置,使屏幕能实现上述运动规律。要求:屏幕摆动角度为70度;主动件的摆动角度为60度;屏幕的摆动速度为0.5rad/s,屏幕的重量为20N。
设定任务:1.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
2.计算主动件的运动速度及驱动力;
3.编写课程设计说明书。
成绩评定表

目录
第1章 设计要求及数据... 5
1.1设计题目... 5
2.2设计目的... 5
1.3原始数据和设计要求... 5
第2章 设计方案的选取... 6
第3章 设计步骤... 8
3.1工作原理... 8
3.2机构设计说明... 8
3.2.1蜗轮蜗杆机构... 8
3.2.2齿轮传动机构 ……………………………………………………………………………9
第4章 心得体会... 11
第5章 参考文献... 12
第1章 设计要求及数据
1.1设计题目
游戏机
某游乐场欲添设一新的游乐项目,该项目是在一暗室中,让一画有景物的屏幕(观众可以看见屏幕上的景物),由静止逐渐开始左右晃动,由于观众在暗室中仅能看见屏幕上的景物,根据相对运动原理,观众将产生一个错觉,他不认为是屏幕在晃动,反而认为是自己在晃动,这是一个有惊无险的游乐项目。
现要求设计一机械传动装置,使屏幕能实现上述运动规律。要求:屏幕摆动角度为70度;主动件的摆动角度为60度;屏幕的摆动速度为0.5rad/s,屏幕的重量为20N。
设定任务:1.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
2.计算主动件的运动速度及驱动力;
2.2设计目的
机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
此课程要求我们熟练掌握和运用机械原理知识,设计一个游戏机,通过电机带动,实现屏幕的左右晃动,主动件的摆角为60度,屏幕摆角70度。
1.3原始数据和设计要求
1.屏幕摆动角度为70度,主动件摆动角度为60度。
2.屏幕摆动速度为为0.5rad/s,屏幕重量为20N。
3.操作动力源为电力,通过电机传动。
4.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
5.计算主动件的运动速度及驱动力;
第2章 设计方案的选取
一开始设计了两个方案为了完成上述所需的要求与目的,方案如下图。方案1和2有很大优越性,可以准确的控制杆长的增长速度。其中方案1为凸轮机构,加工困难,传动也不均匀。从传动上考虑,凸轮机构需要一个复杂庞大的轮系来实现,结构显然非常不紧凑;而且圆柱凸轮本身就比较粗大笨重。所以我们最终选择了方案2的设计。
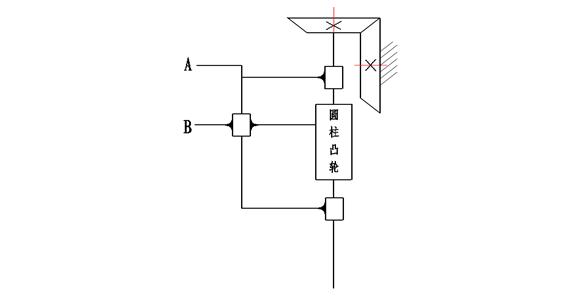
图2-1 方案1
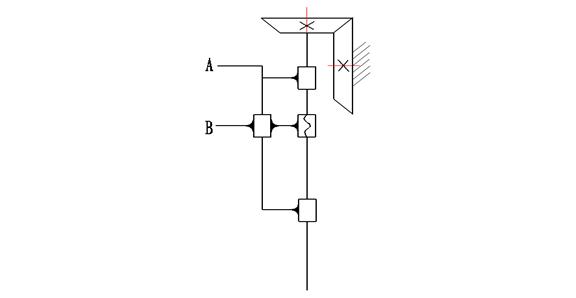
图2-2 方案2
方案2仅能实现杆长的变化,传动还需靠四杆机构来完成,这就需要在双摇杆机构和平行四边形机构之间做出选择。若选择双摇杆机构,分析过程如下:
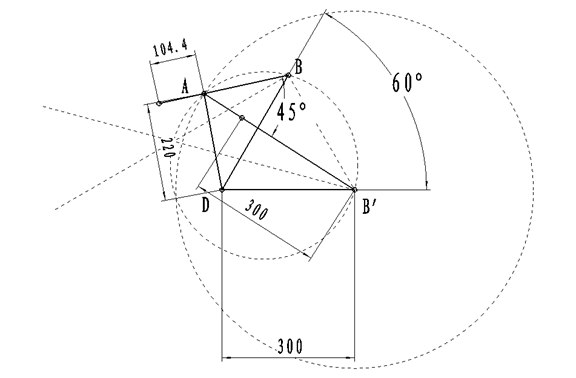
图2-3 双摇杆机构
从a<d到a>d,最后d为最短杆。设b>d,c>d,当a增大至d,最短杆为d。设最长杆为c,则d+c>a+b;若要AB杆为曲柄(周转),只能取临界值,即d+c=a+bc=b。即便a略大于d,AB杆仍周转,只需满足b=c即可。根据实际情况,取b=c=1500mm,又起初摆角为,作图,得最小为。若减小,运动速度均匀,但转动角减小,故取。由以上数据得到的机构急回行程太明显,所以我们最终选择的是平行四边形机构。
第3章 设计步骤
3.1工作原理
电机选用6极电机DDWY200-51000 P=2000W.转轴直径d=10cm。可在380V电压下正常工作,ω=1000r/min
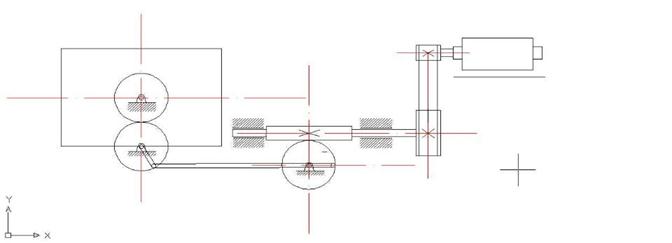
图3-1-1 机械简图
根据设计要求,为使其满足在主动件摆角为60°的情况下,屏幕即从动件摆角为70°,且屏幕摆动速度为0.5rad/s,关键是要把电机这个动力源所提供的运动状态通过机械机构的传动传送至屏幕这一目的地。我们采用电机带动蜗杆,将转动力顺利传动到下一级的蜗轮,同时达到减速的目的;然后蜗轮连接一个四杆机构连接至左端的齿轮,通过计算,实现从转动到摆动的转化,使左边齿轮转角达到60°,均匀摆动;最后,通过齿轮之间的传递咬合,达到从动轮转角为70°的要求,使主动轮与屏幕直接相连,从而达到屏幕转角70°的变化。这一目的的实现只需要通过计算选取合适的尺寸即可。
3.2机构设计说明
3.2.1涡轮蜗杆机构

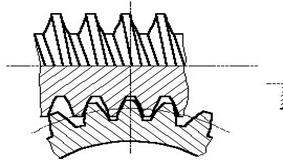
图3-2-1-1 蜗轮蜗杆
蜗轮蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。蜗杆传动用于在交错轴间传递运动和动力。这里借此把电机的转动减速和传递。它由蜗杆和蜗轮组成,蜗杆为主动件,其特点是:
1.传动比,结构紧凑。这个特点就可以把电机极快的转速降下来。蜗杆头数用Z1表示(一般Z1=1~4),蜗轮齿数用Z2表示。从传动比公式I=Z2/Z1可以看出,当Z1=1,即蜗杆为单头,蜗杆须转Z2转蜗轮才转一转,因而可得到很大传动比;在分度机构中,I可达1000。这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
2. 传动平稳,无噪音。因为蜗杆齿是连续不间断的螺旋齿,它与蜗轮齿啮合时是连续不断的,蜗杆齿没有进入和退出啮合的过程,因此工作平稳,冲击、震动、噪音都比较小。
3. 具有自锁性蜗杆的螺旋升角很小时,蜗杆只能带动蜗轮传动,而蜗轮不能带动蜗杆转动。
4. 蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低。尤其是具有自锁性的蜗杆传动,其效率在0.5以下,一般效率只有0.7~0.9。
5. 发热量大,齿面容易磨损,成本高。
本设计采用涡轮蜗杆机构来实现运动传递与减速的目的。
蜗轮蜗杆数据参数:
蜗杆与蜗轮之间的传动比i12=7.5
蜗杆齿数Z1=4 ω1=135/14 rad/s
蜗轮齿数Z2=30 ω2=9/7 rad/s
模数m1=m2=4 杆直径d=40mm 长l=200mm
3.2.2齿轮传动机构
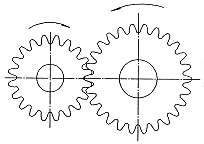
图3-2-2-1 齿轮转动
设计要求通过齿轮2转动60°带动齿轮1转动70°,同时要求转速为0.5rad/s。
参数选择:
根据国家标准GB/T 1357-2008选取模数为m=10;
根据国家标准GB/T 1356-2001选取分度圆上的压力角20°;
根据国家标准GB/T 1356-2001选取齿顶高系数h(a*)=1, 选取顶隙系数c(*)=0.25。
齿轮具体参数及公式如下表和下图:
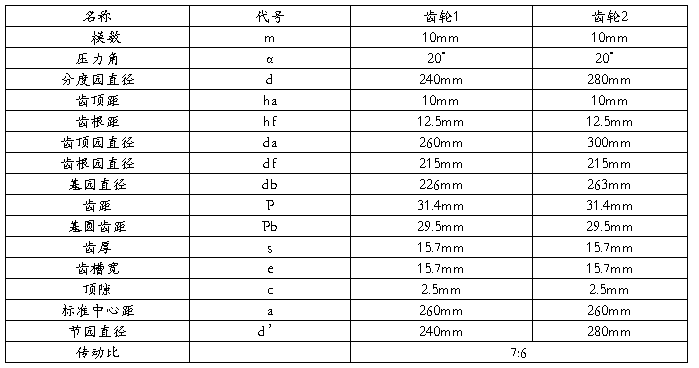
表3-2-2-1
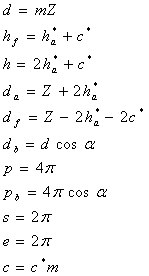
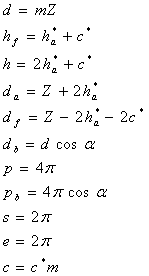 所涉及公式如下:
所涉及公式如下:
第4章 心得体会
说实话,第一次做这个课程设计之类的项目,而且听说还要答辩的时候确实很担心的,由于理论和经验都相对缺乏,让我担心了好一段时间,不过还好多亏了老师的细心指导,在我们不知道怎么下手的时候指明了方向,也让我慢慢恢复了自信。
现在想想其实课程设计当中的每一天都是很累的,其实正向老师说得一样,机械设计的课程设计没有那么简单,你想拷贝或者你想自己胡乱蒙两个数据上去来骗骗老师都不行,因为你的每一个数据都要有自己计算的依据和说服力。
几天的机械原理课程设计结束了,在这次实践的过程中学到了一些除技能以外的其他东西,领略到了别人在处理专业技能问题时显示出的优秀品质,更深切的体会到人与人之间的那种相互协调合作的机制,最重要的还是自己对一些问题的看法产生了良性的变化。在我们三人一组的团队里面,沟通自然是为人处世的基本,如何协调彼此的关系值得我们去深思和体会。
我觉得最重要的是一种解决问题的心态,而不是看我们过去的能力到底有多强。那是一种态度的端正和目的的明确,只有这样把自己身置于具体的问题之中,我们才能更好的解决问题。在这种相互协调合作的过程中,口角的斗争在所难免,关键是我们如何的处理遇到的分歧,而不是一味的计较和埋怨。这不仅仅是在类似于这样的协调当中,生活中的很多事情都需要我们有这样的处理能力,面对分歧大家要消除误解、相互理解、增进了解、达到谅解。也许很多问题没有想象中的那么复杂,关键还是看我们的心态,那种处理和解决分歧的心态,因为毕竟我们的出发点都是很好的。
说到心态,我对我的两个组员的认真负责的态度十分敬佩。他们对每一个数据甚至标点符号都十分认真,对数据的要求也很高。一开始我还很不屑,觉得这些小东西没必要那么一丝不苟的计算,知道最后我发现我最后的数据和他们的误差有多大才明白了对数据认真是绝对重要的。并且他们并没有因为我一开始的不屑不管我,反而过来帮我分析、寻找数据是在哪里出了错误,这让我十分敬佩。
总的来说,这次课程设计对我是很重要的,而且我相信,对于每一个第一次做设计的我们来说,这都是一次非常重要且有意义的经历。在做完设计之后那种成就感和如释重负的感觉我都觉得是那么那么的难忘和真实。最重要的是,它还让我得出一个结论:知识必须通过应用才能实现其价值!有些东西以为学会了,但真正到用的时候才发现是两回事,所以我认为只有到真正会用的时候才是真的学会了。
以上就是我通过这次课程设计所得到的心得体会。
第5章 参考文献
[1]孙恒等.机械原理教材. 北京:高等教育出版社,2013.5
[2]刘超儒等.机械制图第五版 高等教育出版社,2006.12
[3]刘鸿文等.简明材料力学第二版 高等教育出版社,2008.8
[4]马文蔚等.物理学第五版 高等教育出版社,2006.3
[5]邹慧君等.机械原理课程设计手册
第二篇:机械原理游戏机朱建杰
机械原理课程设计
题目:游戏机
姓名:朱建杰
班级:机械设计制造及其自动化一班
学号:0802120141
指导教师:刘凌
20##年6月26日
任 务 书
题目: 游戏机 同组成员:赵磊、王鹏 指导教师:刘凌
某游乐场欲添设一新的游乐项目,该项目是在一暗室中,让一画有景物的屏幕(观众可以看见屏幕上的景物),由静止逐渐开始左右晃动,由于观众在暗室中仅能看见屏幕上的景物,根据相对运动原理,观众将产生一个错觉,他不认为是屏幕在晃动,反而认为是自己在晃动,这是一个有惊无险的游乐项目。
现要求设计一机械传动装置,使屏幕能实现上述运动规律。要求:屏幕摆动角度为70度;主动件的摆动角度为60度;屏幕的摆动速度为0.5rad/s,屏幕的重量为20N。
设定任务:1.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
2.计算主动件的运动速度及驱动力;
3.编写课程设计说明书。
成绩评定表
目录
第1章 设计要求及数据. 5
1.1设计题目. 5
2.2设计目的. 5
1.3原始数据和设计要求. 5
第2章 设计方案的选取. 6
第3章 设计步骤. 8
3.1工作原理. 8
3.2机构设计说明. 8
3.2.1蜗轮蜗杆机构. 8
3.2.2齿轮传动机构 ........................................9
第4章 心得体会. 11
第5章 参考文献. 12
第1章 设计要求及数据
1.1设计题目
游戏机
某游乐场欲添设一新的游乐项目,该项目是在一暗室中,让一画有景物的屏幕(观众可以看见屏幕上的景物),由静止逐渐开始左右晃动,由于观众在暗室中仅能看见屏幕上的景物,根据相对运动原理,观众将产生一个错觉,他不认为是屏幕在晃动,反而认为是自己在晃动,这是一个有惊无险的游乐项目。
现要求设计一机械传动装置,使屏幕能实现上述运动规律。要求:屏幕摆动角度为70度;主动件的摆动角度为60度;屏幕的摆动速度为0.5rad/s,屏幕的重量为20N。
设定任务:1.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
2.计算主动件的运动速度及驱动力;
2.2设计目的
机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
此课程要求我们熟练掌握和运用机械原理知识,设计一个游戏机,通过电机带动,实现屏幕的左右晃动,主动件的摆角为60度,屏幕摆角70度。
1.3原始数据和设计要求
1.屏幕摆动角度为70度,主动件摆动角度为60度。
2.屏幕摆动速度为为0.5rad/s,屏幕重量为20N。
3.操作动力源为电力,通过电机传动。
4.设计传动系统中各机构的运动尺寸,绘制游戏机的机构运动见
图;
5.计算主动件的运动速度及驱动力;
第2章 设计方案的选取
一开始设计了两个方案为了完成上述所需的要求与目的,方案如下图。方案1和2有很大优越性,可以准确的控制杆长的增长速度。其中方案1为凸轮机构,加工困难,传动也不均匀。从传动上考虑,凸轮机构需要一个复杂庞大的轮系来实现,结构显然非常不紧凑;而且圆柱凸轮本身就比较粗大笨重。所以我们最终选择了方案2的设计。
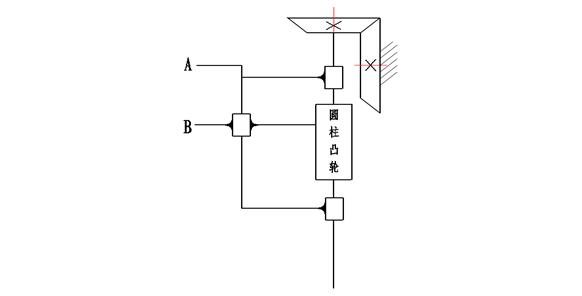
图2-1 方案1
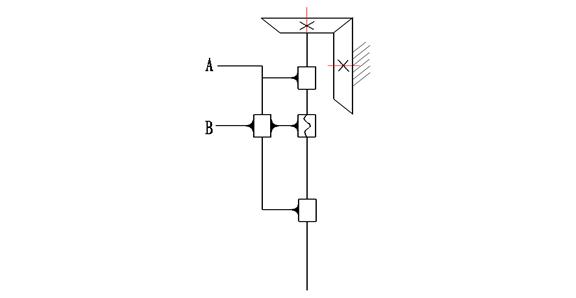
图2-2 方案2
方案2仅能实现杆长的变化,传动还需靠四杆机构来完成,这就需要在双摇杆机构和平行四边形机构之间做出选择。若选择双摇杆机构,分析过程如下:
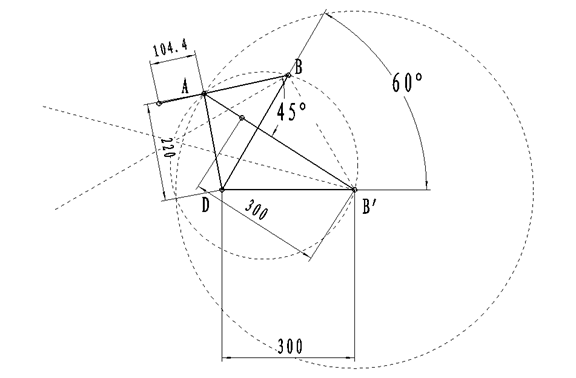
图2-3 双摇杆机构
从a<d到a>d,最后d为最短杆。设b>d,c>d,当a增大至d,最短杆为d。设最长杆为c,则d+c>a+b;若要AB杆为曲柄(周转),只能取临界值,即d+c=a+bc=b。即便a略大于d,AB杆仍周转,只需满足b=c即可。根据实际情况,取b=c=1500mm,又起初摆角为,作图,得最小为。若减小,运动速度均匀,但转动角减小,故取。由以上数据得到的机构急回行程太明显,所以我们最终选择的是平行四边形机构。
第3章 设计步骤
3.1工作原理
电机选用6极电机DDWY200-51000 P=2000W.转轴直径d=10cm。可在380V电压下正常工作,ω=1000r/min
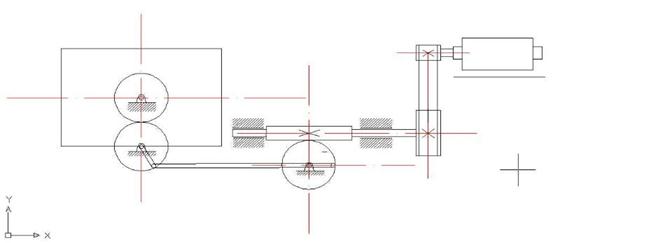
图3-1-1 机械简图
根据设计要求,为使其满足在主动件摆角为60°的情况下,屏幕即从动件摆角为70°,且屏幕摆动速度为0.5rad/s,关键是要把电机这个动力源所提供的运动状态通过机械机构的传动传送至屏幕这一目的地。我们采用电机带动蜗杆,将转动力顺利传动到下一级的蜗轮,同时达到减速的目的;然后蜗轮连接一个四杆机构连接至左端的齿轮,通过计算,实现从转动到摆动的转化,使左边齿轮转角达到60°,均匀摆动;最后,通过齿轮之间的传递咬合,达到从动轮转角为70°的要求,使主动轮与屏幕直接相连,从而达到屏幕转角70°的变化。这一目的的实现只需要通过计算选取合适的尺寸即可。
3.2机构设计说明
3.2.1涡轮蜗杆机构
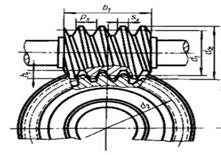
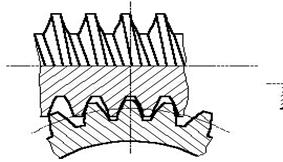
图3-2-1-1 蜗轮蜗杆
蜗轮蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。蜗杆传动用于在交错轴间传递运动和动力。这里借此把电机的转动减速和传递。它由蜗杆和蜗轮组成,蜗杆为主动件,其特点是:
1.传动比,结构紧凑。这个特点就可以把电机极快的转速降下来。蜗杆头数用Z1表示(一般Z1=1~4),蜗轮齿数用Z2表示。从传动比公式I=Z2/Z1可以看出,当Z1=1,即蜗杆为单头,蜗杆须转Z2转蜗轮才转一转,因而可得到很大传动比;在分度机构中,I可达1000。这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
2. 传动平稳,无噪音。因为蜗杆齿是连续不间断的螺旋齿,它与蜗轮齿啮合时是连续不断的,蜗杆齿没有进入和退出啮合的过程,因此工作平稳,冲击、震动、噪音都比较小。
3. 具有自锁性蜗杆的螺旋升角很小时,蜗杆只能带动蜗轮传动,而蜗轮不能带动蜗杆转动。
4. 蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低。尤其是具有自锁性的蜗杆传动,其效率在0.5以下,一般效率只有0.7~0.9。
5. 发热量大,齿面容易磨损,成本高。
本设计采用涡轮蜗杆机构来实现运动传递与减速的目的。
蜗轮蜗杆数据参数:
蜗杆与蜗轮之间的传动比i12=7.5
蜗杆齿数Z1=4 ω1=135/14 rad/s
蜗轮齿数Z2=30 ω2=9/7 rad/s
模数m1=m2=4 杆直径d=40mm 长l=200mm
3.2.2齿轮传动机构
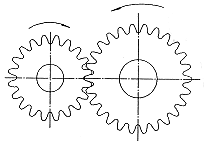
图3-2-2-1 齿轮转动
设计要求通过齿轮2转动60°带动齿轮1转动70°,同时要求转速为0.5rad/s。
参数选择:
根据国家标准GB/T 1357-2008选取模数为m=10;
根据国家标准GB/T 1356-2001选取分度圆上的压力角20°;
根据国家标准GB/T 1356-2001选取齿顶高系数h(a*)=1, 选取顶隙系数c(*)=0.25。
齿轮具体参数及公式如下表和下图:
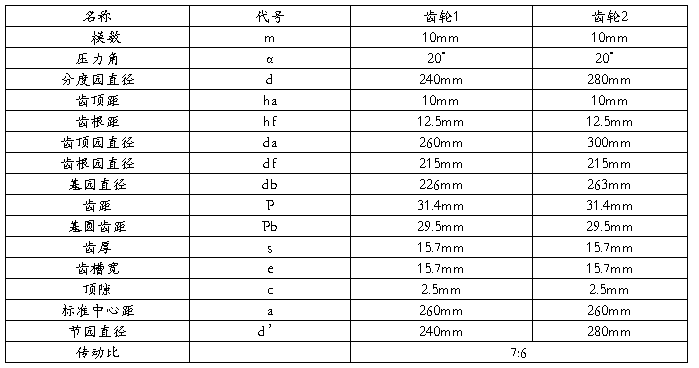
表3-2-2-1
 所涉及公式如下:
所涉及公式如下:
第4章 心得体会
说实话,第一次做这个课程设计之类的项目,而且听说还要答辩的时候确实很担心的,由于理论和经验都相对缺乏,让我担心了好一段时间,不过还好多亏了老师的细心指导,在我们不知道怎么下手的时候指明了方向,也让我慢慢恢复了自信。
现在想想其实课程设计当中的每一天都是很累的,其实正向老师说得一样,机械设计的课程设计没有那么简单,你想拷贝或者你想自己胡乱蒙两个数据上去来骗骗老师都不行,因为你的每一个数据都要有自己计算的依据和说服力。
几天的机械原理课程设计结束了,在这次实践的过程中学到了一些除技能以外的其他东西,领略到了别人在处理专业技能问题时显示出的优秀品质,更深切的体会到人与人之间的那种相互协调合作的机制,最重要的还是自己对一些问题的看法产生了良性的变化。在我们三人一组的团队里面,沟通自然是为人处世的基本,如何协调彼此的关系值得我们去深思和体会。
我觉得最重要的是一种解决问题的心态,而不是看我们过去的能力到底有多强。那是一种态度的端正和目的的明确,只有这样把自己身置于具体的问题之中,我们才能更好的解决问题。在这种相互协调合作的过程中,口角的斗争在所难免,关键是我们如何的处理遇到的分歧,而不是一味的计较和埋怨。这不仅仅是在类似于这样的协调当中,生活中的很多事情都需要我们有这样的处理能力,面对分歧大家要消除误解、相互理解、增进了解、达到谅解。也许很多问题没有想象中的那么复杂,关键还是看我们的心态,那种处理和解决分歧的心态,因为毕竟我们的出发点都是很好的。
说到心态,我对我的两个组员的认真负责的态度十分敬佩。他们对每一个数据甚至标点符号都十分认真,对数据的要求也很高。一开始我还很不屑,觉得这些小东西没必要那么一丝不苟的计算,知道最后我发现我最后的数据和他们的误差有多大才明白了对数据认真是绝对重要的。并且他们并没有因为我一开始的不屑不管我,反而过来帮我分析、寻找数据是在哪里出了错误,这让我十分敬佩。
总的来说,这次课程设计对我是很重要的,而且我相信,对于每一个第一次做设计的我们来说,这都是一次非常重要且有意义的经历。在做完设计之后那种成就感和如释重负的感觉我都觉得是那么那么的难忘和真实。最重要的是,它还让我得出一个结论:知识必须通过应用才能实现其价值!有些东西以为学会了,但真正到用的时候才发现是两回事,所以我认为只有到真正会用的时候才是真的学会了。
以上就是我通过这次课程设计所得到的心得体会。
第5章 参考文献
[1]孙恒等.机械原理教材. 北京:高等教育出版社,2013.5
[2]刘超儒等.机械制图第五版 高等教育出版社,2006.12
[3]刘鸿文等.简明材料力学第二版 高等教育出版社,2008.8
[4]马文蔚等.物理学第五版 高等教育出版社,2006.3
[5]邹慧君等.机械原理课程设计手册
-
机械原理总结
机构和零件不同,构件是(运动的单元),而零件是(制造的单元)。凸轮的基圆半径越小,则机构尺寸(越大)但过于小的基圆半径会导致压力角…
-
机械原理重要概念总结
机械原理重要概念总结零件独立的制造单元构件机器中每一个独立的运动单元体运动副由两个构件直接接触而组成的可动的连接运动副元素把两构件…
-
机械原理总结
机械原理总结合肥工业大学机械设计制造及其自动化13级6班目录0绪论...40.1机器的三大特征:40.2零件和构件的区别:...4…
-
机械原理总结
1什么叫机械什么叫机器什么叫机构它们三者之间的关系a机械是机器和机构的总称b机器是一种用来变换和传递能量物料与信息的机构的组合c用…
-
机械原理总结
1机械是机构和机器的总称2机构是一种用来传递与变换运动与力的可动装置机构由机架原动件从动件组成3机器是指一种执行机械运动装置可用来…
-
公路路政大队个人工作总结
公路路政大队20xx年度工作总结年即将过去。在一年的实践中磨练了我的工作能力,使我的业务能力和管理水平又有了很大的提高,当然这与上…
-
园林公司绿化施工员年终工作总结
绿化施工员年终工作总结时光匆忙,不知不觉中,进入XX园林公司已经近一年了。俯身回顾这初入公司的一年,我付出了很多,也收获了不少,我…
-
学生会总结
时光如箭,日月如梭。转眼间本学期已接近尾声,回顾这一学期所经历的风风雨雨,失去与所得,我从中学到了许多,感悟了许多。从刚刚开始对学…
-
爱婴医院工作总结
20xx年,在院领导和爱婴医院管理办公室的正确领导下,继续深入开展三好一满意和创建平安医院活动及优质护理服务工作,认真贯彻执行国家…
-
路政管理工作总结
自公路通车以来,为了保障辖段的安全畅通,维护好路产路权,在支队的直接领导和关心指导下,全体路政人员“务实奉献,开拓进取”,以保障道…