篇一 :哈工大倒立摆实验报告
研究生自动控制专业实验
地点:A区主楼518房间
平面二级倒立摆
系统实验报告
哈工大航天学院控制科学实验室
平面二级倒立摆控制系统实验报告
一、实验内容
1、熟悉平面二级倒立摆控制系统的结构和原理;
2、了解平面二级倒立摆物理模型建模与控制器设计;
3、掌握LQR控制器仿真与实验;
二、实验设备
1、平面二级倒立摆控制系统一套
平面二级倒立摆控制系统包括平面二级倒立摆控制器、平面二级倒立摆本体实验装置等组成。在平面二级倒立摆本体上有起动/停止电源开关,螺旋浆起动/停止开关。
2、平面二级倒立摆控制系统计算机部分
平面二级倒立摆控制系统计算机部分主要有计算机、SV-400控制卡等;
三、实验步骤
1、系统实验的线路连接
平面二级倒立摆本体与计算机全部采用标准线连接,电源部分有标准电源线,在试验前,实验装置的线路已经连接完毕。
2、启动实验装置
通电之前,请详细检察电源等连线是否正确,确认无误后,可接平面二级倒立摆本体电源,随后起动计算机和控制器。
…… …… 余下全文

篇三 :二阶倒立摆实验报告
研究生课程实验报告
课程名称:线性系统
实验名称:平面二级倒立摆实验
班级: 12S0441
学号:12S104057
姓名:白 俊 林
实验时间: 2012 年12 月 21 日
控制科学与工程教学实验中心
1. 实验目的
1) 熟悉Matlab/Simulink仿真;
2) 掌握LQR控制器设计和调节;
3) 理解控制理论在实际中的应用。
…… …… 余下全文
篇四 :倒立摆实验报告
机械综合设计与创新实验
(实验项目一)
二自由度平面机械臂三级倒立摆
班级:
姓名:
学号:
指导教师:
时间:
综述
倒立摆装置是机器人技术、控制理论、计算机控制等多个领域、多种技术的有结合,被公认为自动控制理论中的典型实验设备,也是控制理论教学和科研中不可多得的典型物理模型。倒立摆的典型性在于:作为实验装置,它本身具有成本低廉、结构简单、便于模拟、形象直观的特点;作为被控对象,它是一个高阶次、不稳定、多变量、非线性、强耦合的复杂被控系统,可以有效地反映出控制中的许多问题;作为检测模型,该系统的特点与机器人、飞行器、起重机稳钩装置等的控制有很大的相似性[1]。倒立摆系统深刻揭示了自然界一种基本规律,即一个自然不稳定的被控对象,运用控制手段可使之具有良好的稳定性。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科,即力学、数学和电学(含计算机)有机的结合起来,在倒立摆系统中进行综合应用。在多种控制理论与方法的研究和应用中,特别是在工程实践中,也存在一种可行性的试验问题,将其理论和方法得到有效的经验,倒立摆为此提供一个从控制理论通往实践的桥梁[2]。因此对倒立摆的研究具有重要的工程背景和实际意义。
…… …… 余下全文
篇五 :倒立摆实验报告
倒立摆控制系统实验报告

实验台:3号
指导老师:田杨
20##年5月
实验一 建立一级倒立摆的模型
1.实验目的
建立一级倒立摆系统的数学模型,并进行Matlab仿真。
2.实验内容
写出系统的传递函数与状态空间方程,并用Matlab进行仿真。
3.实验步骤
实际系统参数如表1.1所示。
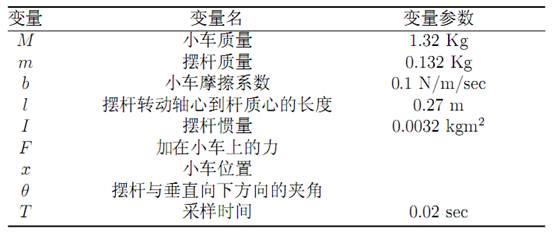
表1.1: 系统参数表
实验步骤如下:
(1)将数据代入公式,求出系统的传递函数;
(2)将数据代入公式,求出系统的状态空间方程;
(3)将实际系统的状态空间方程转化为传递函数,与1进行比较
(4)求出传递函数的极点和状态方程A的特征值,进行比较;
(5)进行系统开环脉冲响应和阶跃响应的Matlab仿真。
4.实验代码
系统传递函数gs(输出为摆杆角度)和gspo(输出为小车位置)构建:
M=1.32;m=0.132;b=0.1;l=0.27;I=0.0032;g=9.8;T=0.02;
q=(M+m)*(I+m*l^2)-(m*l)^2
num=[m*l/q 0];
den=[1 b*(I+m*l^2)/q -(M+m)*m*g*l/q -b*m*g*l/q];
…… …… 余下全文

篇七 :一级倒立摆系统实验报告
实验报告
一级倒立摆系统实验报告
一:设计题目
基于参数自整定PID模糊控制器的球杆系统控制
二:具体设计内容
1).一级倒立摆系统系统的特点
倒立摆系统是典型的机电一体化系统,其机械部分遵循牛顿的力学定律,其电气部分遵守电磁学的基本定理.因此,可以通过机理建模方法得到较为准确的系统数学模型,通过实际测量和实验来获取系统模型参数.无论哪种类型的倒立摆系统,都具有3个特性,即:不确定性、耦合性、开环不稳定性. 直线型倒立摆系统,是由沿直线导轨运动的小车以及一端固定于小车上的匀质长杆组成的系统. 小车可以通过传动装置由交流伺服电机驱动. 小车导轨 一般有固定的行程,因而小车的运动范围是受到限制的。
虽然倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:
1) 非线性 倒立摆是一个典型的非线性复杂系统,实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制。也可以利用非线性控制理论对其进行控制。倒立摆的非线性控制正成为一个研究的热点。
2) 不确定性 主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
…… …… 余下全文
篇八 :一阶倒立摆双闭环PID控制实验报告
姓名:戴鹏 指导老师:胡立坤 成绩:
学院:电气工程学院 专业:自动化 班级:自093
------年------月-------日 实验内容:基于双闭环PID控制的一阶倒立摆控制器的设计与验证实验
其他组员:黄育尚
【实验时间】 20xx年1月18日星期五
【实验地点】综合楼702
【实验目的】
1. 理解一阶倒立摆的工作机理及其数学模型的建立及简化的方法;
2. 通过对一阶倒立摆的建模,掌握使用Matlab/Simulink软件对控制系统的建模方法;
3. 通过对一阶倒立摆控制系统的设计,理解和掌握双闭环PID控制系统的设计方法;
4. 掌握双闭环PID控制器参数整定的方法;
5. 掌握Simulink子系统的创建方法;
6. 理解和掌握控制系统设计中稳定性、快速性的权衡以及不断通过仿真实验优化控制系统的方法。
【实验原理】
本实验的被控对象为固高公司的倒立摆实验系统,一阶倒立摆的结构原理图如图1所示,一阶倒立摆系统的组成框图如图2所示。一阶倒立摆精确模型如图3所示。
…… …… 余下全文