机床数控技术复习重点总结

1、数控技术指用数字化的信息对机床运动及加工过程进行控制的一种技术
2、数控机床的组成:输入输出装置、数控装置、伺服系统(执行部分)、检测反馈装置和机床本体
3、数控机床的工作流程:编制数控程序、输入、译码、刀具补偿、插补、位置控制和切削加工。
4、数控机床的特点:a.加工精度高,b.产品质量稳定、c.可加工复杂异型零件、劳动生产效率高、d.加工零件的适应性强,灵活性好、e.工人劳动强度轻、f.生产管理水平高
5、数控机床的分类:A按机械加工运动轨迹分类:a、点位控制数控机床b、直线控制数控机床c、轮廓控制数控机床B按伺服系统的控制原理分类:a、开环控制数控机床(精度取决于驱动元器件和步进电动机的步进精度、工作频率,难以实现高精度加工,优点是结构简单、成本较低)b、全闭环控制数控机床(系统精度取决于检测装置的精度,消除了放大和传动部分的误差的直接影响,该系统定位精度高,系统复杂维护成本高适用于大型精密设备)c、半闭环控制数控机床(检测元件装在传动链的旋转部位,它所检测的不是工作台的实际位移而是旋转轴的转角量,系统结构简单,便于调整、价格低、目前大多数机床都采用此系统)
 6、数控加工技术:1、传统加工:划线、样板;数控加工:多轴联动实现2、基准先行,在各个表面的加工按“先粗后精、先主后次、先面后孔”的原则划分工步。3、工步的划分,一般按走刀路线进行,使走刀路线最短,减少刀具空行程时间,提高加工效率。
6、数控加工技术:1、传统加工:划线、样板;数控加工:多轴联动实现2、基准先行,在各个表面的加工按“先粗后精、先主后次、先面后孔”的原则划分工步。3、工步的划分,一般按走刀路线进行,使走刀路线最短,减少刀具空行程时间,提高加工效率。
7、加工阶段的划分:粗加工阶段、半精加工阶段、精加工阶段、光整加工阶段、超精密加工阶段。
8、加工顺序的安排:先加工内型内腔后加工外形外腔、应先进行刚性破坏较小的工序 、上道工序的加工不能影响下道工序的定位与夹紧、相同定位方式的最好连续加工
 9、数控加工工序设计:1、确定走刀路线和安排工步顺序2、定位基准与夹紧方案的确定3、夹具的选择4、刀具的选择5、确定对刀点与换刀点6、切削用量的确定。
9、数控加工工序设计:1、确定走刀路线和安排工步顺序2、定位基准与夹紧方案的确定3、夹具的选择4、刀具的选择5、确定对刀点与换刀点6、切削用量的确定。
10、数控机床用刀具:①高速铣刀不要用于加工毛坯表面,易损坏刀具。②加工余量小且表面粗糙度较低时应采用镶嵌式立方氮化硼刀具③镶硬质合金的可用于加工毛坯表面及凹槽、凸台。
11、数控编程的方法:手工编程—适用于结构简单的零件;自动编程—适用于复杂零件
12、坐标轴的命名—右手定则的笛卡尔坐标(大拇指X轴、食指Y轴、中指Z轴)
13、机床参考点:为建立机床坐标系在数控机床上设有一固定位置点称为机床参考点(数控铣床的参考点选在XYZ坐标的正方向极限位置外、数控车床的参考点选在车刀退刀主轴端面和旋转中心线较远的某一固定点)
14、程序结构与格式:数控系统的指令准备功能G(1、不同组别可重复使用2、同一程序段出现两次以上以后面的G功能有效)
15、模态指令:指在某一程序段应用后可一直保持有效状态直到撤销;非模态指令:指单段有效指令,仅在编入的程序段有效
16、①快速点定位功能G00,格式G00 X_Y_Z_②直线插补指令G01,格式:G01 X_Y_Z_F_③圆弧插补指令G02—顺圆弧、G03—逆圆弧
17、返回参考点(G28、G30)在指行G28指令之前应取消刀具补偿
18、G40/41/42:取消补偿/刀具左补偿/刀具右补偿
19、比例缩放:G51 X_Y_Z_(比例中心绝对坐标)P_(缩放比例)
20、高速深孔钻循环指令G73 XYZRQFK
21、攻右旋螺纹循环指令G84 XYZRPFK攻左旋螺纹循环指令G74
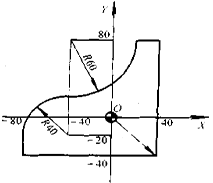
O0100
N0010 G92 X0 Y0;设定工件坐标系
N0020 G90 G17 G00 X40 Y-40 S600 T01 M03;
N0030 G01 X-80 Y-40 F200;进给速度200mm
N0040 G01 X-80 Y-20;
N0050 G02 X-40 Y20 R40 F100;顺时针差补 终点坐标
N0060 G03 X20 Y80 R60;
N0070 G01 X40 Y80 F200;
N0080 Y-40;
N0090 G00 X0 Y0 M02;快速移动原点;程序停止
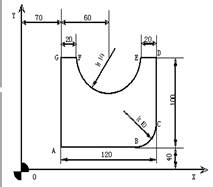
O0010
N010 G92 X0 Y0;
N020 G91 G42 G00 X70 Y40 D01 S800 M03 M08;刀具右补偿冷却
N030 G01 X80 Y0 F100;相对坐标
N040 G03 X40 Y40 I0 J40;
N050 G01 Y60;
N060 X-20;
N070 G02 X-80 I-40;圆心指定
N080 G01 X-20;
N090 Y-100;
N100 G00 G40 X-70 Y-40 M05 M09 M30;主轴停止;关闭冷却液;程序结束并返回
第二篇:机床数控技术及应用复习提纲
机床数控技术及应用复习提纲
1、标准坐标系采用右手笛卡尔坐标系,它规定了直角坐标系X、Y、Z、之间的关系及其正方向。
2、G代码又称为准备功能代码,M代码又称为辅助功能代码。
3、M00为程序停止指令,M01为计划停止指令,M02为程序结束指令。M30除与M02的作用相同外,还可使程序返回至开始位置。
4、M06为换刀指令常用于加工中心机床刀库换刀前的准备动作。
5、通常字地址程序段中字的顺序及形式一般为:
N_ G_ X_ Y_ Z_ F_ S_ T_ M_ ;
6、数控车床主要用于加工轴类、盘类等回转体零件,特别适合加工
复杂形状的回转类零件。
7、机床坐标系是机床上固有的机械坐标系,是机床出厂前已设定好
的。
8、换刀点是为数控车床等自动换刀数控机床设定的换刀位置,换刀
点的位置既要保证换刀时刀具不碰到工件、夹具或机床,又不能太远离加工零件。
9、加工工艺的选择应遵循一般工艺的原则下,结合数控车床的特点,
具体包含:
(1)分析零件图样;
(2)确定零件加工工序和装夹方式;
(3)确定零件的加工顺序;
(4)确定进给路线。
10、分析零件图样包括:
(1)结构工艺分析;
(2)轮廓几何要素分析;
(3)精度和技术要求分析。
11、确定零件的加工顺序遵循的原则是:
(1)先粗后精;
(2)先近后远;
(3)内外交叉或先内后外。
12、确定进给路线的一般原则:
(1)采用最短的空行程路线;
(2)采用最短的切削进给路线;
(3)采用大余量毛坯的阶梯切削进给路线,并使每次切削余量相等;
(4)最后精加工采用轮廓连续切削进给路线;
(5)采用特殊的进给路线。
13、按刀具的结构分类:整体式刀具、焊接式刀具、机夹式可转位刀
具。
14、数控刀具在加工当中属连续不间断切削,所以选用刀具要考虑的
因素如下:(1)切削性能好;(2)精度高;(3)可靠性高;(4)耐用度高;(5)断屑及排屑性能好。
15、在数控车床中,刀具补偿功能主要有刀具位置补偿功能和刀尖圆
弧半径补偿功能。
16、G41:左补偿(沿刀具加工方向看,刀具位于工件左侧时为左补
偿)。
17、G42:右补偿(沿刀具加工方向看,刀具位于工件右侧时为右补
偿)。
18、G90 X(U)_ Z(W)_ R_ F_ ;
其中:X(U)、Z(W)——终点坐标;
R——锥角半径值;
F——进给速度。
19、G73 U W R
G73 P Q U W F S T;
其中:U——X轴方向的总切深余量(半径值指定);
W——Z轴方向的总切深余量;
R——粗切循环次数;
P——精加工程序第一个程序段的序号;
Q——精加工程序最后一个程序段的序号;
U——X方向精加工余量(直径值指定);
W——Z方向精加工余量。
20、G76 P(m)(r)(α) Q(Δdmin) R(d); G76 X(U)_ Z(W) _ R(i) P(k) Q(Δd) F(L)
其中: m——精加工重复次数(1——99);
r——倒角量;
α——刀尖角度;
Δdmin——最小切深(用半径值指定);
d——精加工余量;
i——螺纹半径差;
k——螺纹牙高(用半径值指定);
Δd——第一刀切削深度(用半径值指定);
L——螺距P;
X(U)、Z(W)——螺纹底径(小径)的坐标值。
21、螺纹切削加工中应注意的事项:
(1)在螺纹切削期间不要使用恒线速切削指令;
(2)在螺纹切削期间进给速度倍率无效、主轴速度固定在100%;
(3)螺纹循环回退功能对G32无效;
(4)在螺纹切削程序段的前一程序段中不能指定倒角或倒圆;
(5)在螺纹切削前,刀具起始位置必须大于或等于螺纹直径,锥螺纹按大端直径计算;
(6)螺纹的起点和终点位置应当比指定的螺纹长度要长;
(7)用G92或G76切削锥螺纹时,螺纹半径差i的值应为刀具起点和终点位置的大小端半径差;
(8)在MDI方式下不能使用G70、G71、G72或G73指令。
22、数控铣床及加工中心的加工工艺和数控车床一样,首先要对零件图样进行工艺性分析,确定装夹方案,确定进给路线以及选择刀具。
23、铣削内、外轮廓为防止加工表面出现刀痕,刀具不能沿轮廓曲线的法向切入和切出,可以选择刀具沿一过渡圆弧切入和切出工件轮廓。
24、刀具由开始切削一直到磨损量达到磨钝标准为止的总切削时间称为刀具耐用度。用符号C来表示。
25、粗加工切削用量的选择原则:应优先采用大的切削深度,其次考虑采用大的进给量,最后才选择合理的切削速度。
26、对刀点是数控加工时刀具相对工件运动的起点,也是程序的起点,也称起刀点。
27、对刀点的选定原则:
(1)应使程序编制简单;
(2)对刀点在机床上容易找正;
(3)加工过程中检查方便;
(4)引起的加工误差小;
(5)对刀点应尽量选在零件的设计基准或工艺基准上;
(6)应便于坐标值的计算;
(7)尽量使加工程序中进刀或退刀的路线短,并便于换刀。
28、换刀点是为数控车床、数控钻镗床以及其他自动换刀数控机床设定的换刀位置。
29、平面选择指令G17为选择X、Y平面指令;G18为选择Z、X平面指令;G19为选择Y、Z平面指令。
30、宏程序体由变量、运算指令和控制指令等组成。
31、变量根据变量号可以分成4种类型:#0——空变量;#1-#33——局部变量;#100-#199和#500-#999——公共变量;#1000以上——系统变量。
32、宏程序中的控制指令起控制程序流量的作用,有三种转移和循环操作可供使用:
(1)无条件转移语句
GOTO n;
转移到标有顺序号n的程序段;
(2)条件转移语句
IF [<条件表达式>] GOTO n
如果指定的条件表达式满足时转移到标有顺序号n的程序段,如果指定的条件表达式不满足,则执行下个程序段;
(3)循环语句(WHILE)
WHILE[<条件表达式>] DO m;
??
END m;
在WHILE后指定一个条件表达式,当指定条件满足时执行从DO到END之间的程序段m次,否则转到END m后的下一个程序段。
33、CNC一般由中央处理单元(CPU)和总线、存储器(ROM、RAM)输入/输出(I/O)接口电路及相应的外部设备、PLC、主轴控制单元、速度进给控制单元等组成。
34、CPU是微型计算机的核心,由运算器、控制器和内寄存器组组成。
35、存储器用于存储系统软件和零件加工程序、各种参数。存储器又分为:随机存取存储器(RAM)和只读存储器(ROM)。
36、从CNC计算机系统的硬件结构上可分为单微处理机和多微处理机
结构、大板式结构与功能模块式结构。
37、计算机数控系统是用计算机控制加工功能实现数值控制的系统。
38、多微处理机的结构具有以下特点:
(1)性能价格比高;
(2)采用模块化结构有良好的适应性和扩展性;
(3)硬件易于组织规模生产;
(4)有很高的可靠性。
39、多微处理机CNC装置有两种典型结构:(1)共享存储器结构;(2)共享总线结构。
40、并行总线裁决方式中,要配置专用逻辑电路来解决主模块的判优问题,通常采用优先权编码方案来实现。
41、常见的功能模块有CNC控制板、位置控制板、PLC板、图形板、通信板及主存储器模板等。
42、译码程序的功能主要包括代码识别和功能代码的解释两部分。
43、在现代CNC系统中,常采用数据采样的插补方法,将插补功能分割为软件插补和硬件插补两部分。软件实现粗插补,硬件实现细插补。
44、常用的诊断程序有启动诊断、在线诊断、停机诊断、远程通信诊断等。
45、CNC系统软件的特点:(1)多任务并行处理;(2)多重实时中断处理。
46、CNC系统软件结构的分类:(1)前、后台型处理;(2)多重中断型结构;(3)功能模块软件结构。
47、按照规定的直线给出两端点间的插补数字信息,以控制刀具的运动,使之加工出理想的平面,称为直线插补。
48、按照规定的圆弧或其他二次曲线、高次函数,曲线插补给出两端点间的插补数字信息,以控制刀具的运动而加工出理想的曲面称为曲线插补。
49、CNC系统与NC系统的根本区别在于,CNC系统采用了软件插补,可以更好的进行数学处理,还可以进行误差试算,选择误差较小的方向进给以提高插补精度;而NC由硬件电路来完成,只能作一些简单的运算处理。
50、常用的运动轨迹插补方法:(1)脉冲增量法;(2)数据采样法;
(3)软件/硬件相配合的两级插补法。
51、在逐点比较法中,每进给一步都要经过4个节拍:(1)偏差判别;
(2)坐标进给;(3)新偏差计算;(4)终点判别。
52、用数字累加原理,保证在编程规定的进给速度下获得所需轨迹,这种插补方法称为数字积分法。
53、数据采样法也称为时间分割法。
54、进给运动误差的来源:(1)齿隙或间隙;(2)螺距误差;(3)热变形误差;(4)机床构件的扭曲和变形;(5)机床溜板的摩擦;(6)数控机床的综合间隙。
55、螺距误差补偿的步骤:
(1)安装高精度位移测量装置;
(2)选择定位点,编制简单的程序;
(3)记录运动到定位点的实际精确位置;
(4)将各定位点的误差标出,制作误差表;
(5)多次测量取平均值;
(6)将误差表输入数控系统。
56、当工作台反向运动时,对伺服系统施加一定宽度和高度的脉冲电压,以补偿间隙误差。
57、数据系统内部处理的信息大致可分为两类:(1)控制坐标轴运动的连续数字信息;(2)控制逻辑开关量信息。
58、PLC根据功能的不同可分为:(1)开关逻辑控制类型;(2)闭环过程控制类型;(3)组成多级控制系统类型;(4)控制机器人类型;
(5)组合数字控制类型。
59、CNC系统中用PLC实现控制的类型可分为内装型和独立型两类。
60、内装型PLC是指PLC内含在CNC装置内,从属于CNC装置,并与CNC装置集于一体。
61、内装型PLC既可以与CNC共用一个CPU,也可以为PLC设置专用的CPU。
62、PLC与MT(机床)之间交换的信息分两个方向进行:(1)PLC向机床发送的控制信息;(2)机床向PLC发送的反馈信息。
63、目前大多数主轴无级变速的数控系统均采用S4代码编程。
64、根据取刀/还刀位置是否固定,可将换刀功能分为随机存取换刀控制和固定存取换刀控制。
65、对进给伺服系统的要求:(1)精度高;(2)快速响应,无超调;
(3)调速范围宽。
66、伺服驱动系统可分为:步进电机、直流伺服电机和交流伺服电机3类。
67、伺服驱动系统按控制方式又可分为开环控制和闭环控制两大类。
68、步进驱动系统主要有反应式和混合式两类。其区别为:
反应式价格较低,混合式价格较高,但混合式步进电机的输出力矩大,运行频率及升降速度快,因而性能更好。
69、交流伺服电机最大的优点在于它不需要维护,制造简单,适用于在恶劣环境下工作。
70、闭环驱动按位置检测的方式可分为半闭环、全闭环和混合闭环三种。
71、三相三拍
所谓“三相”,是指步进电机有三相定子绕组,“三拍”是指每三次转换为一个循环,第四次则重复第一次的通电情况。
72、步进电机的驱动电源包括环形分配器和功率放大器两部分。
73、脉冲分配控制有软件和硬件两种实现方法。如用硬件实现,则实现这一功能的硬件称为环形分配器。
74、单电压供电功放电路的特点是通过提高驱动电压加速电流的上升,同时在绕组中串入大功率电阻,用于限制稳态电流。由于电流较大,在功率电阻上的功耗大,因此发热严重,驱动电路的体积也很大,因此很少采用这种电路。
75、高电压切换驱动电路的特点是高压充电,低压维持。
76、三相混合式细分步进电机驱动器的特性:动态性能好、运行平稳、噪声小、输出力矩大。
77、步距角误差是指理论步距角与实际步距角的差值。
78、步进电机由静止突然启动,进入不失步正常运行的最高频率称为启动频率或突跳频率。
79、步进电机启动后,能逐渐不失步地连续升速到的最高频率称为连续运行频率。
80、分辨率是指位置检测系统所能测量的最小位移量。
81、位置检测元件按照检测方式可分为直接测量和间接测量位置检测元件。
82、对机床工作台的直线移动采用直线型检测元件称为直接测量。
83、采用检测驱动电动机或丝杠旋转角度的方法间接测量工作台的移动距离,这种方法称为间接测量。
84、数控机床对检测元件的基本要求:(1)工作可靠、抗干扰性强;
(2)满足精度、速度和测量范围的要求;(3)使用维护方便,适合机床的工作环境;(4)易于实现高速的动态测量和处理,易于实现自动化;(5)成本低。
85、在数控机床中常用的直接测量元件有光栅尺和直线感应同步器,间接测量元件有光电编码器和旋转变压器。
86、光电编码器由光源、聚光镜、圆光栅、指示光栅、光电元件、不透光条纹、透光条纹组成。
87、光栅尺分为玻璃透射光栅与金属反射光栅两类。
88、玻璃透射光栅的特点:(1)光源可以垂直入射,光电元件可直接接受光信号;(2)刻线密度大,分辨率高。
89、金属反射光栅的特点:(1)标尺光栅的线膨胀系数很容易与机床材料一致;(2)易于接长或制成整根的长光栅;(3)不易碰碎;(4)分辨率低。
90、将两块等宽、等距的标尺光栅和指示光栅平行安装,将指示光栅在其自身平面内倾斜很小的角度,以便使它的刻线与标尺光栅的刻线保持很小的夹角,在光源的照射下,形成了与光栅刻线几乎垂直,横向的明暗相间的宽条纹称为莫尔条纹。
91、莫尔条纹的特点:(1)放大作用;(2)莫尔条纹的移动与栅距成比例;(3)平均误差作用;(4)光强为正弦变化。
92、感应同步器的工作原理:直线感应同步器中的定尺与滑尺平行安装,且保持一定间隙,定尺固定在床身上,滑尺则安装在机床的移动部件上,当励磁的滑尺移动时,在定尺上产生感应电压,通过对感应电压的测量,可以精确地测量出位移量。
93、感应同步器的特点:(1)精度高;(2)可用于长距离位移测量;
(3)对环境的适应性较强;(4)使用寿命长,维护简单;(5)工艺性好,成本低。
94、直流电动机的调速可以有三种方法:(1)改变电动机电枢控制电压;(2)改变励磁回路电流;(3)改变电枢电路的电阻。
95、大惯量电动机的优点:(1)能承受的峰值电流和过载能力高;(2)具有大的力矩与惯量比,快速性好;(3)低速时输出的力矩大;(4)
调速范围大;(5)转子热容量大。
96、数控机械传动机构的基本要求:(1)提高传动精度和刚度、消除传动间隙;(2)减小摩擦阻力;(3)减小运动惯量。
97、机械传动间隙包括:(1)机械传动机构的反转间隙;(2)与速度无关的摩擦力;(3)外部切削力引起的弹性变形反转误差。
98、现代数控机床对主轴传动提出了更高的要求,具体表现在:(1)数控机床主传动要有较宽的调速范围;(2)要求主轴在全速度范围内均能提供切削所需功率;(3)要求主轴在正、反转动时均可进行自动加、减速控制;(4)为满足加工中心自动换刀以及某些加工工艺的需要,要求主轴具有高精度的准停控制功能;(5)在车削中心上,要求主轴具有旋转进给轴的控制功能。
99、自动变档控制常采用液压拨叉和电磁离合器两种方法。 100、主轴准停可分为机械准停和电气准停。
101、电气准停控制的优点表现如下:(1)简化机械结构;(2)缩短准停时间;(3)可靠性强;(4)性能价格比高。
102、电气准停常采用的方法有磁传感准停、编码器型准停和数控系统准停。
-
数控技术总结
数控技术第一章数控机床它是利用数字化的信息对机床运动及加工过程进行控制的一种方法一它的基本组成包括1计算机数控系统CNC它是由微处…
-
数控技术培训总结范文
数控培训总结二双元制职教体系双元制职业教育是德国职业教育成功的关键是德国工业经济腾飞的致胜法宝所谓双元制是指学生在职业培训时采用企…
-
数控技术总结
数控技术数控机床它是利用数字化的信息对机床运动及加工过程进行控制的一种方法它的基本组成包括1计算机数控系统CNC它是由微处理器存储…
-
数控技术重点总结
武汉工程大学机电工程学院11级机制赖永新一绪论1数控数字控制简称它是利用数字化的信息对机床运动及加工过程控制的方法2数控系统包括数…
-
数控技术知识点总结
第一章1机电一体化技术是微电子技术和计算机技术向机械工业渗透的过程中逐渐形成并发展起来的一门多学科领域交叉的新型综合性学科它是机械…
-
数控教学工作总结
数控教学总结数控课程,在这个学期教学和实训重点主要从以下几个方面着手:一、明确教学和实训的目的安排数控实训的基本目的,在于通过该课…
-
数控机床加工1002班班级工作总结
20xx-20xx学年度第一学期班级工作总结数控机床加工1002班班主任:郑莉莉本学期以来紧张快节奏的校园生活和忙碌的工作任务将要…
-
数控维修方面工作总结
个人工作总结时间一晃而过,转眼间三个月的实习期已经接近尾声,首先感谢公司领导给了我这次工作和学习的机会,是您延续了我再次发展的梦想…
-
数控机床实训总结
篇二:数控机床实训总结1、实训目的要求(1)、对各典型零件进行工艺分析及程序编制,能熟练掌握较复杂零件的编程。(2)、对所操作的数…
-
工作总结之数控车床加工
工作总结黄永剑工作总结黄永剑本人自20xx年开始参加工作,从事数控车床工作已经有8年,期间还不断参加各种进修课程充实自我,并通过考…
-
数控技术培训总结
省级骨干教师数控技术培训总结20xx年x月x日至20xx年x月x日,我有幸参加了省教育厅在南京工程学院举办的中等职业学校“数控技术…