20xx年度工程测量工作总结
20##年度测量工作总结
前言
光阴似箭,2014即将步入尾声,回顾本年的工作,项目部测量组在项目部领导的指导和关怀下,主要完成了工程控制网复测与联测、施工导线加密测量和复测、车站施工放样测量、内业资料计算、程序编制以及日常管理等工作。通过这一年的努力,测量队全体成员顺利完成了年度所有测量工作任务。现将测量组本年度工作中存在的不足和累积下的经验总结如下。
第一章 主要完成工作情况
一、20##年主要完成工作
1、车站施工测量
(1)雅苑路站完成:
① 导墙施工放样测量34次,模板校正测量41次,高程测量35次,共计811米;
② 冠梁、砼支撑施工放样测量11次,模板校正测量12次;共计851米;
③ 车站主体施工放样测量57次,模板校正测量66次;其中底板9组、侧墙14组、中板6组、顶板5组。
④ 其他施工放样测量15次。
(2)红谷中大道站完成:、
① 导墙施工放样测量53.2米;
② 车站主体施工放样测量10次,模板校正测量5次;顶板1组;
③ 槽壁加固施工放样测量3次。
(3)中间风井完成:
① 导墙施工放样测量103.8米;
② 冠梁、砼支撑施工放样测量3次,模板校正测量1次;共计230.32米。
2、控制测量
标段内施工控制点加密及复测全年共计实施5次;配合第三方控制测量5次;配合上级精测队控制测量3次,竖井联系测量1次。
3、内业资料的计算与编制
内业资料的计算也是一项细心而重要的工作,首先要收集所需的设计资料“曲直线要素表、纵断面图、线路中线逐桩坐标表等,按照设计图纸上要素逐个计算并复核设计参数,保证设计提供的数据准确无误。其次是编制测量放样资料。隧道施工各项工序都要有过程控制资料,要做到及时、准确。相关报验资料根据施工进度严格执行报验成序。
二、测量的日常管理及人员培训进展情况
测量组采用分站点小组负责制,根据测量任务实际情况将全标段内划分为三个站点,分别由三个小组负责其全部测量任务。
具体分为土压盾构测量小组、雅苑路站测量小组、红谷中大道站及中间风井测量小组,每个小组由小组长、内业计算等3~4人组成。各小组负责各自所辖范围内的全部测量工作及内业资料的计算、复核、编制和报审;各测量小组的工作由测量主管统一监督、检核、协调指挥。
目前人员业务素质参差不齐,学习积极性及进步速度相差太大,整体人员业务能力进步不太理想。
第二章 工作总结
一、控制测量
20##年11月份开工以来,为了满足现场施工需求,提高测量施测精度;项目测量组应测量中心要求,协同相邻标段建立“2号线施工测量精密导线网”;并依据测量中心提供的《控制网复测第一次成果表》,根据南昌地铁公司施工测量管理办法要求每季度进行精密导线复测工作。首先开展了GPS导线控制网的复测联测工作,积极联系3标项目部进行了GPS平面控制网和水准网的联测,利用GPS从相邻3标段中铁十八局春晖路公共点复测至与5标项目部阳明公园站公共控制点,形成了书面的复测报告并报监理站及测量中心审核合格后使用并存档。
施工控制点加密及复测共计实施了5次,利用精密导线布网要求进行控制点加密和测量,采用莱卡TS06全站仪进行导线边角测量,测角精度和测回数严格按照规范要求施测,对不满足要求的坚决重测,平差后结果及精度符合测量规范要求。水准测量利用S05级自动安平水准仪进行往返测量,闭合差符合测量规范要求。为车站和隧道施工测量放样提供准确的平面控制点位及高程基准点,使得下一步测量工作顺利进行。
1、导线测量
1.1导线点布设情况
我标段现存使用导线控制点有:GPS006、GPS007、DT20##、DT20##、JMⅡ401、JMⅡ402、Y3、Y2、Y1、JMⅡ404、JMⅡ404-1、JMⅡ405、JMⅡ406、Z3、JMⅡ407、JMⅡ408、JMⅡ409、JMⅡ410、F1、F2、F4、F5,共计22个平面导线控制点。其中GPS006、GPS007、DT20##、DT2027(4个)为二等GPS控制点,JMⅡ401、JMⅡ402、Y3、JMⅡ407、JMⅡ408、JMⅡ409、JMⅡ410(7个)为精密导线网GPS测量点,剩余点为精密导线点。
为保证过江隧道贯通精度,我项目测量组与测量中心共同协商决定在江两岸埋设两对通视的GPS控制点,并用全站仪进行联测,以检核GPS测量成果及验证全站仪长距离过江测量的可靠性。

导线布设示意图
1.2 测量方法
加密测量平面控制导线采用附和导线形式;数据计算采用严密平差方法,精度应符合规范要求。
(1)附和导线的边数严格控制少于12个,相邻边的短边不宜小于长边的1/2,最短边不应小于150m;
(2)水平角观测采用左、右角观测,左、右角平均值之和与360°的较差应小于4″;水平角观测一测回内2C较差应小于13″;同一方向值各测回较差应小于9″。
(3)平面控制水平角测六测回,距离往返对向观测,测量往返观测各读数次共计六次,各项值在限差范围内取平均值,温度、气压在施测前由人工修正。
由于我标段处于南昌红谷滩闹市区,高楼林立;故各控制点大多数布设在十字路口,但由于十字路口车辆较多测量条件较为困难。根据近一年的导线测量情况,在以后布设导线及测量应注意以下几点:
(1)导线点尽量布设在十字路口开阔地段,且保证边长不短于150米;300米对观测精度及观测清晰度最为有利。
(2)相邻导线点尽量不要布设在道路的同一侧,以避免车辆及行人等障碍物长期阻挡视线;
(3)在绿化带内埋设点位时务必保证埋深大于60cm,并需将基地夯实;在道路边埋设点位时可减少埋深,但必须破除路面沥青层,将桩点锚固在原缓凝土路基上;
(4)导线观测时尽量在后半夜以后进行,此时车辆较少,温度较低,对导线测量的影响最小;
(5)避免迎太阳光测量,此时观测对角度影响较大,易造成2C较差超限;
(6)严格控制导线观测各项限差,对于超限的测回必须进行弃用;
(7)导线测量时,前后视司镜测量员必须集中注意力配合主机测量员,以提高测量速度,降低因观测者眼睛疲劳对观测精度的影响。
1.3计算方法
导线测量的计算方法,采用卡西欧5800计算器编程“DXJSPC”程序进行平差计算;该程序为导线近似平差,平差成果与“南方平差易2005”的严密平差成果对比,较差小于1mm,在允许范围内。因此,在季度导线复测及施工加密测量过程中,均采用“DXJSPC”程序进行平差计算。该程序是在原“DXJSPC”程序上根据我标段实际施工情况进行修改而成的。
2、水准测量
2.1水准点布设情况
我标段现存使用水准控制点有:DTQ023、DTBM008、DTBM038、DTQ022、DTQ021、JY223-1、JMⅡ401H、Y3、JMⅡ407共计9个水准控制点。其中DTQ023、DTBM008、DTBM038、DTQ022、DTQ021、JY223-1、(6个)为一等水准控制点。我标段各站点周边均有一对水准点,且点位牢固,故水准导线情况较好。
2.2 测量控制要点
(1)定期对水准仪i角检测值应小于或等于15″,在水准仪使用过程中发现仪器有异常,必须立即进行校核。
(2)观测顺序:1)往测奇数站上:后-前-前-后
偶数站上:前-后-后-前
2)返测奇数站上:前-后-后-前
偶数站上:后-前-前-后
(3)测量分别在上午、下午进行,由往测专返测时,两根水准尺必须互换位置,并重新整置仪器。
(4)前后视距≤60m,前后视距差≤2m,前后视距累计差≤4m;上下丝读数平均值与中丝读数之差≤3.0mm,基辅分划读数之差≤0.5mm,基辅分划所测高差之差≤0.7mm,检测间歇点高差之差≤2.0mm。
全标段季度水准线路复测均按照二等水准测量要求进行复测;在复测过程中各项控制指标均应按照二等水准测量规范的限差要求进行。在实际操作过程中应注意以下几点,可有助于提高测量精度及效率:
(1)前后视距尽量控制在30米至35米之间,该视距清晰度最好,且基辅差值最不易超限,有助于降低观测者的视力疲劳,提高观测速度及精度;
(2)在水准线路较长的情况下,为提高测量速度,可采用两台精度等级相同(最好型号相同)的精密水准仪进行同步观测;两台仪器的较差可作为线路闭合差进行平差处理;
(3)在观测员架设仪器及观测数据的过程中,记录人员应随即计算出前后视距及视距差、累计视距差、基辅读数差、高差等计算内容;
(4)最简单有效的控制前后视距的方法就是以均匀的步伐丈量;
(5)切记单程测量过程中同一把尺子上点,以消除尺长误差的影响。
3、竖井联系测量
自8月份“地~雅盾构区间”开工以来,测量组组织处精测组及测量中心对“地~雅盾构区间”盾构始发井先后进行了三次竖井联系测量及高程传递测量。
每次竖井联系测量及高程传递测量独立进行,首先从二等平面控制点及一等高程控制点进行近井导线加密测量;然后再进行竖井联系测量及高程传递测量。近井测量平面和高程均采用附和导线。由于地铁大厦站主体结构已经施工完成,具备较好的测量条件,所以竖井联系测量采用两井定向方法进行以提高地下导线定向精度。测量过程严格按照规范要求的各项限差进行,测量成果满足规范要求。
3.1、地面近井导线测量
为保证近井点测量精度,地面近井导线测量采用复核导线形式进行,且以GPS006、GPS007作为导线起始边。在测量施测过程中,各项限差均按照精密导线网测量规范进行。由于白天测量条件较差,导线观测选择在夜间进行。

两井定向导线示意图
3.2、竖井定向测量
地铁大厦站主体结构已经施工完毕,具备良好的测量条件。经过对比,两井定向相对一井定向操作简单,精度较高,故竖井联系测量采用两井定向测量。具体两井定向不再做介绍,仅根据实际施作过程,总结以下控制要点:
(1)投点时间尽量选择在周围施工活动停止,周围无重型车辆行驶时进行,无风,以降低震动,风力对钢丝稳定性的影响;
(2)钢丝的选择尽量选择直径0.4mm或0.35mm的钢丝,钢丝直径太粗将会影响钢丝的重垂性和十字丝的瞄准准确度;
(3)重锤的选择,重锤可自己加工,但必须确保重锤重量在10kg~11kg,避免重锤过轻无法保证钢丝垂直,或重锤过重拉断钢丝;
(4)稳定液的选择,通过实际应用,液压油的稳定性最好;极端条件下也可以用水代替,但水稳的时间较长,且易受到干扰;实践证明泥浆或膨润土泥浆不可用,重锤在泥浆中由于泥浆粘连使重锤无法摆动。
3.3、高程传递
高程传递测量相对操作较简单,而且精度容易保证。在实际操作过程中可以悬挂两把不同牌子的钢尺来避免尺长误差的影响。钢尺悬挂时应将“0”刻度端悬挂在上固定。为消除支架震动或其他因素度钢尺读数造成的偶然误差,可采用两台相同精度的水准仪井上井下同时进行观测。其他各项限差及操作规范均应按照规范要求进行。
二、车站施工测量
截止12月,车站施工主要集中在雅苑路站封堵墙南段,现以雅苑路站施工测量过程中的工作流程及遇到的相关问题做以总结。
车站施工测量任务较为繁杂,任务阶段性较强,在不同的阶段测量任务也有较大的差异。总体分为“前期临建阶段”、“围护结构施工阶段”、“基坑开挖阶段”、“主体结构施工阶段”四个阶段。对各个阶段做如下总结。
1、前期临建
开工前期的场地临时设施建设及规划较为复杂,受外界因素影响较大。以雅苑路站为例,自开工以来,雅苑路站因受管线迁改及业主等因素影响,场地围挡先后多次进行调整。但整体规划必须保证首先不能影响主体结构建筑界限,其次要保证施工对场地的要求。
对于测量组需要做的是首先把车站的建筑位置及总体轮廓标记出来,其次在场地排水沟施工时一定要保证水沟坡度的连续性,保证场地排水顺畅。其他测量事项视情况而定,不再做具体说明。
在场地硬化前,应该预先选择控制桩点的埋设位置,并做好桩点,避免二次破混凝土;同时可以在混凝土凝固前在主体结构两侧的场地上打一些测量钉,作为备用测量点,方便后续测量放样使用。
2、围护结构施工测量
维护结构主要分为导墙施工和地连墙施工两个阶段。导墙的平面位置决定了地连墙的位置,地连墙的位置决定了后续主体结构施工的界限;因此,导墙的位置尺寸是整个车站施工的第一道关键工序。根据已施工段的维护结构做如下总结:
(1)导墙施工放样工序流程:

(2)导墙外放:为保证车站净空,防止地连墙成槽施工过程中垂直度侵限,在导墙施工时均应考虑导墙外放尺寸。我标段两层站尺寸外放5cm,三层站尺寸外放10cm,中间风井五层站尺寸外放15cm。从目前各个车站基坑开挖情况,以上外放尺寸满足施工要求,地下连续墙整体未出现侵限。
(3)导墙加宽:为保证成槽机抓斗顺利下放及导墙负重变形,导墙宽度需要进行加宽,加宽值为5cm。
(4)点之记:在导墙理论控制点放线完成后,需要将点位延伸至沟槽开挖区域外,且不易被挖掘机破坏的地方,每个点要外延两个点,边长控制在3米为宜。
(5)设站方法:在现场条件允许的情况下首先选择极坐标定向;现场控制点间不通视的情况下采用后方交会定向。曾经有同行学者质疑后方交会定向精度,我测量组经过理论计算及现场实际操作证明,后方交会定向在保证测站至已知点边长近似相等的情况下定向精度等同于极坐标定向,满足施工放线要求。定向过程中,后视已知点时,需要采用正倒镜定向,以提高定向精度。
(6)导墙外放:外放尺寸是由操作工人在带线时增加的,因此,外放方向及外放值必须清楚的向施工技术员及施工工人交代清楚,避免钢筋绑扎及模板安装无外放或外放方向相反的现象出现,影响工程进度。
(7)幅段分幅及标高:在导墙浇筑完成拆模后,应及时将分幅线放出,并将每一幅段钢筋笼吊环位置的高程测量出来,以供技术员计算钢筋笼吊环焊接长度及成槽施工。
3、基坑开挖阶段
基坑开挖过程中涉及的测量内容较少,主要跟踪基坑开挖深度,严禁超挖现象。对于个别墙面突出位置进行测量确定其是否超限,对于超限位置做好标记并通知技术员进行处理。
4、主体结构施工测量
主体结构较为复杂,测量任务繁重,且较多工序均为不可逆工序。根据实际施工过程中主体结构施工测量相关工序及出现过的错误之处作如下总结:
(1)主体结构施工测量主要包括:基层找平测量、底板放样及校模测量、侧墙和立柱放样及校模测量、中板及预留孔洞放样及校模测量、顶板放样及校模测量等内容。施工放样流程如图:


(2)垫层施工:垫层施工主要控制垫层标高,根据实际施工垫层标高控制低于设计标高3cm较为合适。在有下翻梁、集水井段,应先进行梁槽开挖放线;梁槽开挖完成后再进行第二次放线以供砌砖尺寸控制;垫层打完后再进行第三次放线供钢筋绑扎使用。在有综合接地段施工时,应特别注意综合接地预留接口端子位置,避免垫层已经施工完成而综合接地忘记施作的情况发生。
(3)底板放样:考虑到施工模板安装,及方便现场工人自行检核模板位置,底板所有结构放线均放控制线。侧墙为1.2m控制线,外加5cm单侧结构外放(为保证结构净空,防止侧墙施工侵入建筑限界,特将结构横向净空加宽10cm);立柱及上翻梁为两侧外延30cm控制线。在测量组放线完成后,应首先用钢尺自行检测结构尺寸是否与图纸吻合,确认无误后现场交付技术人员,并有技术人员组织施工人员及时用墨斗弹线。
(4)侧墙校模:侧墙模板安装完成后,测量组需及时进行模板位置校核。校核要点为模板位置是否侵限,模板垂直度是否超限,模板平整度是否超限。侧墙校模采用全站仪无棱镜测模板板坐标,运用线路程序“DLPMJS”反算里程及偏量。测量点位为每块模板上下测量4个点,每组模板根据长度决定是否需要加密测量。根据测量结果显示,侧墙模板混凝土浇筑完成后变形量:底部向车站内部变形约1cm,顶部向车站外部变形约1.5cm,在模板安装时可以将该值考虑在内。
(5)立柱放样及校模:立柱放样重点在于插筋位置。及在下翻梁或上翻梁钢筋绑扎完成后需进行立柱插筋位置再次定位,防止插筋误差造成混凝土浇筑后立柱位置无法调整。在梁混凝土凝固后需要读立柱四个角点进行放样,该4个角点放样为实际点位,不需要进行外放;考虑实际施工情况,在条件不好的情况下该四个角点可以只放出其中3个,满足施工要求。立柱校模等同侧墙校模,主要控制平面位置及垂直度。
(6)中板放样:中板放样控制点主要为模板高程、下排风道位置、中板预留孔洞位置、轴线。为防止模板负重下沉,中板底部高程较设计高程需要抬高3cm。各个孔洞应特别注意,不能遗漏,孔洞放线完成后必须进行尺寸检核,多数孔洞涉及设备安装,尺寸要求严格。
三、盾构施工测量
目前地~雅盾构区间正在进行施工。该盾构机使用的导向系统是英国的“ZED激光导向系统”。在盾构机导向系统领域,目前常用的导向系统有:德国的“VMT系统”、“PPS棱镜系统”、“TACS激光系统”,英国的“ZED激光导向系统”,日本的“演算工坊系统”、“东机美TIMS”,广州的“棱镜系统”,上海市政二公司的“雄鹰导向系统”,上海的“隧道股份系统”、“863”系统,华中科技大学导向系统,同济大学导向系统和上海立信RMS-D系统。
根据本工程使用的ZED激光导向系统和在使用过程中出现的相关问题做以总结,以供在后续工作中参考。
1、导向系统的安装及调试
该系统为1号线使用过的随机配置系统,在我标段始发前,曾多次咨询原1号线测量组该系统在隧道掘进过程中应注意的要点及常出现的问题和相应的解决办法。该系统参建过多条隧道,算得上是“老系统”,系统的稳定性较差;特别是在通讯方面较不稳定。
为了对该系统做系统的评估及使测量人员尽快熟悉该系统的操作;保证隧道掘进轴线的准确性;本次始发邀请VMT公司导向系统工程师来做导向系统的安装及调试。
本系统的安装步奏如下:
(1)在盾构机组装过程中将激靶连接线与室外天线同步盾构机线路布线;
(2)盾构机组装完成后对当前及其参考点大地坐标进行测量。盾构机一共有18个机器参考点,均匀分布在机器中盾一周;根据理论3个参考点即可以解算出机器姿态,但考虑到准确性及精度,尽量消除单点测量误差,参考点测量越多越好,最好均匀分布。
(3)内业计算,主要包括线路中线坐标及盾构机姿态参数。线路数据在用ZED线路软件“DTA Designer”计算时应特别注意线路参数的准确性,切勿将线路中线曲线要素误认为隧道中线曲线要素。
(4)将数据导入到导向系统中,根据盾构机导向系统测得的盾构机姿态与人工测量盾构机姿态进行对比,调整较差及修正值。
2、全站仪移站测量
盾构隧道施工重要环节就是激光站前移。小直径盾构在砂层地质下掘进速度较高,且管片稳定性较差,因此保证激光站坐标准确性是盾构施工控制的要点。根据已施工隧道段遇到的相关问题及采取的相应措施对移站测量作如下总结:
(1)始发激光站位置要选择在盾构始发井的车站主体梁上,且应尽量降低激光站对中架的高度,避免始发反力架等设施遮挡激光。该问题在本次盾构始发中已经遇到,由于期初激光站架子安装位置较高,造成盾构机刚进洞,激光就被负环管片遮挡。后采取将强制对中架四条腿加长20cm后得以解决。
(2)第一次搬站尽量使盾构机掘进距离长一点;掘进距离越长,后面的管片就越稳定。当激光站到达最后一节拖车时,就应该将激光站迁移至第二节拖车头部。激光站吊篮比需安装牢靠,不能有明显晃动。该距离约有48m,基本上两至三天需要移动一次激光站。
(3)激光站每次移动均需要从车站内控制点进行引测,引测采用坐标定向测量,高程采用水准测量。当发现两测回内点位较差较大时,需进行边角测量分析原因,有疑问或有超限数据禁止使用。
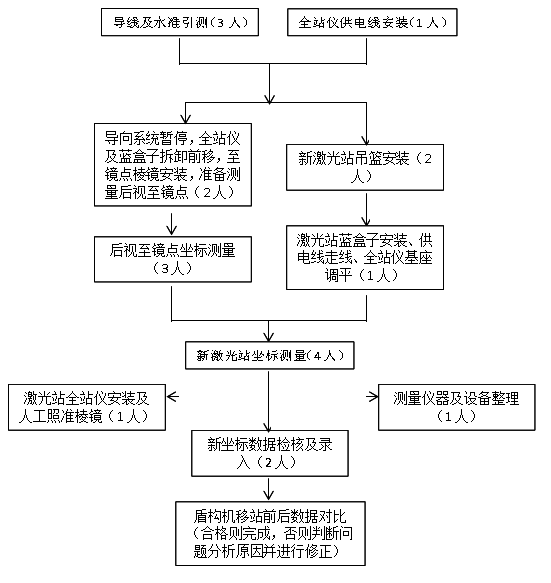
(4)激光站移站步骤:(按照4人小组配置)
(5)应注意的问题:该系统存在较多问题,在移站过程中必须小心注意。
①激光站天线断裂,经修复后可以使用,但不能弯折;
②全站仪与蓝盒子连接线必须红点对准红点,否则数据无法传输;
③后视棱镜基座不能与全站仪通用,易造成测角差约5分左右,已经新购置全站仪基座解决该问题。
3、管片姿态测量
每次移站完成后随即进行管片姿态测量,管片姿态测量采用横尺法进行测量,每五环一测。测量数据及时进行计算处理并与盾构机导向系统测得姿态进行对比、分析。
管片姿态报验按照每50环报验一次,下次报验重叠上次20环数据。
盾构机拖车后面的管片按照每10环做一断面测量。断面测量采用全站仪测量对称4个点位,计算其实际圆心,与盾构管片姿态测量成果进行对比,并分析差异原因。
管片姿态测量具体施作较为简单,不再赘述。
四、小结
经过一年的工作,在控制测量与施工测量方面由于缺乏经验测量组全体成员走了许多弯路积累也到了相关经验;在此仅根据施工过程中遇到的较为深刻的问题或教训做以总结,以避免在后续工作中再次出现类似问题。
新的一年即将来临,让我们振奋精神,坚定信心,以奋发有为的良好精神状态和扎实的工作作风。克服工程中后期面临的诸多问题和困难,理清工作思路,推进项目建设,强化我测量队技术人员管理,更进一步完善管理制度,为全面出色完成20##年工作目标而努力奋斗。
-
测量员年终工作总结
工作总结时光飞逝,转眼间xx年又到尾声了。测量是工程的眼睛,作为测量人员,我本着实事求是、一切以数据说话的原则从事测量工作。我静心…
-
20xx测量员工作总结
工作总结尊敬的公司领导、项目领导、大家好!我叫****,时光飞逝,20xx年即将过去,在即将过去的一年里,在公司和项目部的领导下,…
-
测量工作总结
尊敬的领导你好转眼间10年已经远去我们又迎来了崭新的一年总结一年来的工作站在个人角度谈谈对测量工作的认识质量是企业的生命质量是企业…
-
测量员个人年度总结
测量是工程的眼睛,作为测量人员,我们本着实际求实、一切以数据说话的原则从事测量工作。20xx年在项目部测量工作中,总结出一些经验与…
-
20xx年度测量队-工作总结
20xx年度测量工作总结中铁**局集团**铁路一项目部二○一二年十二月二十五日20xx年度测量工作总结中铁**局集团**公司**项…
-
测量员年度工作总结
20xx年度个人年终总结时间过得可真快,转眼间20xx年已经在我们身边流逝。这半年是紧张的半年也是充实的半年。在这半年的时间里。工…
-
测量员年度工作总结
测量员技术总结时间过得可真快,转眼间20xx年已经在我们身边流逝。这三年是紧张的三年也是充实的三年。在这三年的时间里。工作和学习让…
-
测量员试用期转正工作总结报告
来公司到现在已经有三个月时间了。现在是我努力学习的阶段。三人行,必有我师,公司中的每一位同事都是我的老师,他们的丰富经验和工作行为…
-
测量员年终总结
年终总结紧张的20xx年过去了,作为南京久大路桥建设有限公司一名技术人员,我在公司领导、项目部领导和同志们的关心和支持下,通过努力…
-
20xx测量员工作总结
工作总结尊敬的公司领导、项目领导、大家好!我叫****,时光飞逝,20xx年即将过去,在即将过去的一年里,在公司和项目部的领导下,…
-
测量工作总结
《建筑测量》教学工作总结仁寿职教中心:龚云香与时间赛跑,我们永远都是第二名。20xx节奏很快,所以转眼就都过去了。我所执教的是《建…