总结报告与实验指导
实验1 超声波测距并用液晶显示
一、实验目的
1、 掌握AVR单片机I/O口、定时器的运用;
2、 掌握超声波测距原理与应用;
3、 掌握液晶显示器1602的使用。
二、实验类型
自主创新性。
三、计划学时
4学时。
四、实验设备与平台
1、实验设备:计算机(PC),多功能智能车实验平台,AVR下载/仿真器。
2、软件平台:ICCAVR C语言程序开发软件,AVR STUDIO软件调试平台。
五、涉及的知识点
AVR单片机I/O口、定时器的原理及其配置、液晶显示控制、超声波传感器原理与运用,C语言程序设计。
六、实验原理
本实验平台,提供的电路硬件结构及接口与如下所示:
1、利用AVR单片机I/O口的控制,结合1602液晶显示方法,实现对超声波传感器测出的值回显。液晶显示接口电路,如图1.1所示:

图1.1 液晶显示接口电路
2、根据超声波传感器测距原理,先发出一串40KHz超声波信号,在检测回波信号,算出超声波往返时间t,根据公式S=v*t/2,室温下取v=340m/s,即可算出测量距离。超声波传感器测距接口电路,如下图1.2所示:

图1.2 超声波传感器测距接口电路
七、实验程序
#include<iom128v.h>
#include<macros.h>
#define uchar unsigned char
#define uint unsigned int
extern const uchar table[]={"distance="};
uint time_count=255;
uint int0_counter=0;
int distance=0,pre_distance[3];
void delay(uint ms)
{
uint i,j;
for(i=0;i<ms;i++)
{
for(j=0;j<1141;j++);
}
}
void write_com(uchar com)
{
PORTD&=~BIT(5);
PORTD&=~BIT(6);
PORTC=com;
PORTD|=BIT(7);
delay(1);
PORTD&=~BIT(7);
}
void write_dat(uint dat)
{
PORTD|=BIT(5);
PORTD&=~BIT(6);
PORTC=dat;
PORTD|=BIT(7);
delay(1);
PORTD&=~BIT(7);
}
void display_init()
{
/**********************************/
/************显示设置************/
/*******************************/
uchar i;
DDRC=0XFF;
DDRD|=BIT(5)|BIT(6)|BIT(7);
PORTD&=~BIT(7);
write_com(0X38);
delay(5);
write_com(0X01);
delay(5);
write_com(0X0F);
delay(5);
write_com(0X06);
delay(5);
DDRD|=BIT(5)|BIT(6)|BIT(7);
PORTD&=~BIT(7);
write_com(0X80+0);
for(i=0;i<12;i++)
{
write_dat(table[i]);
delay(5);
}
/************显示距离************/
write_com(0X80+0x40);
write_dat(distance/100+0x30);
delay(5);
write_dat(distance/10%10+0x30);
delay(5);
write_dat(distance%10+0x30);
/************显示距离************/
/************显示设置************/
}
void renew_distance()
{
/************显示距离************/
write_com(0X80+0x40);
write_dat(distance/100+0x30);
delay(5);
write_dat(distance/10%10+0x30);
delay(5);
write_dat(distance%10+0x30);
/************显示距离************/
}
void main()
{
display_init();//显示初始化
/**********外部中断初始化************/
EICRA=0X02;
EIMSK=BIT(INT0);
SEI();
/**********外部中断初始化************/
/**********超声波启动信号************/
DDRB|=0x10;
TCCR0=0B01101111;//快速PWM模式1024分频
OCR0=1;//脉冲宽度128us
//TIMSK|=0X01;//溢出中断使能
/**********超声波启动信号************/
while(1)
{
if(distance<0) distance=0;
pre_distance[2]=pre_distance[1];
pre_distance[1]=pre_distance[0];
pre_distance[0]=distance;
distance=(pre_distance[2]+pre_distance[1]+ pre_distance[0])/3;
if(int0_counter>=10)
{
renew_distance();
int0_counter=0;
}
}
}
#pragma interrupt_handler int0:2
void int0()
{
time_count=TCNT0;
int0_counter++;
distance=218*time_count/100-11;//单位cm
}
八、思考与拓展
1、用其他方法(例如改变定时器和中断方式)控制超声波传感器,
实现测距?
2、如何通过算法提高测量精度?
实验2 基于超声波传感器的智能车避障
一、实验目的
1、 掌握超声波传感器的应用;
2、 掌握电机驱动的原理与PWM控制方式;
3、 掌握舵机的原理及控制方法;
4、 掌握智能小车的闭环控制方法,包括经典PID控制、模糊控制等。
二、实验类型
进阶实验、自主创新性。
三、计划学时
在实验1的基础上,4学时。
四、实验设备与平台
1、实验设备:计算机(PC),多功能智能车实验平台,AVR下载/仿真器。
2、软件平台:ICCAVR C语言程序开发软件,AVR STUDIO软件调试平台。
五、涉及的知识点
AVR单片机I/O口、定时器的原理及其配置、超声波传感器原理与运用,C语言程序设计、自动控制原理、运动控制技术、智能控制理论等。
六、实验原理
本实验平台,提供的电路硬件结构及接口与如下所示:
1、 超声波传感器测距原理及控制方式见实验1图1.2,在此不再累述。
2、 电机驱动电路图及AVR单片机的接口如下图2.1所示,其中IN1连接PB5口,IN2连接PB6口。

图2.1 电机驱动电路图
七、实验程序
#include<iom128v.h>
#include<macros.h>
#define uchar unsigned char
#define uint unsigned int
extern const uchar table[]={"distance="};
uint time_count=255;
uint int0_counter=0;
int distance=0,pre_distance[3];
void delay(uint ms)
{
uint i,j;
for(i=0;i<ms;i++)
{
for(j=0;j<1141;j++);
}
}
void write_com(uchar com)
{
PORTD&=~BIT(5);
PORTD&=~BIT(6);
PORTC=com;
PORTD|=BIT(7);
delay(1);
PORTD&=~BIT(7);
}
void write_dat(uint dat)
{
PORTD|=BIT(5);
PORTD&=~BIT(6);
PORTC=dat;
PORTD|=BIT(7);
delay(1);
PORTD&=~BIT(7);
}
void display_init()
{
/**********************************/
/************显示设置************/
/*******************************/
uchar i;
DDRC=0XFF;
DDRD|=BIT(5)|BIT(6)|BIT(7);
PORTD&=~BIT(7);
write_com(0X38);
delay(5);
write_com(0X01);
delay(5);
write_com(0X0F);
delay(5);
write_com(0X06);
delay(5);
DDRD|=BIT(5)|BIT(6)|BIT(7);
PORTD&=~BIT(7);
write_com(0X80+0);
for(i=0;i<12;i++)
{
write_dat(table[i]);
delay(5);
}
/************显示距离************/
write_com(0X80+0x40);
write_dat(distance/100+0x30);
delay(5);
write_dat(distance/10%10+0x30);
delay(5);
write_dat(distance%10+0x30);
/************显示距离************/
/************显示设置************/
}
void renew_distance()
{
/************显示距离************/
write_com(0X80+0x40);
write_dat(distance/100+0x30);
delay(5);
write_dat(distance/10%10+0x30);
delay(5);
write_dat(distance%10+0x30);
/************显示距离************/
}
void steer_throttle_init()
{
DDRB|=BIT(5)|BIT(6);
DDRE|=BIT(3)|BIT(4);
TCCR1A=0B10100010;//14模式快速PWM,无分频,f=8k
TCCR1B=0B00011001;
ICR1=999;
OCR1A=300;
OCR1B=300;
TCCR3A=0B10100010;//14模式快速PWM,8分频,f=8k
TCCR3B=0B00011010;
ICR3=1999;
OCR3A=400;
OCR3B=400;
}
void main()
{
display_init();//显示初始化
steer_throttle_init();//舵机电机PWM初始化
/**********外部中断初始化************/
EICRA=0X02;
EIMSK=BIT(INT0);
SEI();
/**********外部中断初始化************/
/**********超声波启动信号************/
DDRB|=0x10;
TCCR0=0B01101111;//快速PWM模式1024分频
OCR0=1;//脉冲宽度128us
//TIMSK|=0X01;//溢出中断使能
/**********超声波启动信号************/
while(1)
{
if(distance<0) distance=0;
pre_distance[2]=pre_distance[1];
pre_distance[1]=pre_distance[0];
pre_distance[0]=distance;
distance=(pre_distance[2]+pre_distance[1]+ pre_distance[0])/3;
if(int0_counter>=10)
{
renew_distance();
int0_counter=0;
}
}
}
#pragma interrupt_handler int0:2
void int0()
{
time_count=TCNT0;
int0_counter++;
distance=218*time_count/100-11;//单位cm
}
八、思考与拓展
1、如何调整PID参数,使智能小车避障更准确?
2、如何改进控制策略,例如,采用模糊控制或PID神经元网络控制?
实验3 基于红外传感器的智能车自动寻迹
一、实验目的
1、掌握红外传感器的原理及应用;
2、掌握电机驱动的原理与PWM控制方式;
3、掌握舵机的原理及控制方法;
4、掌握智能小车的轨迹控制方法,包括轨迹规划、智能识别等。
二、实验类型
进阶实验、自主创新性。
三、计划学时
在实验2的基础上,6学时。
四、实验设备与平台
1、实验设备:计算机(PC),多功能智能车实验平台,AVR下载/仿真器。
2、软件平台:ICCAVR C语言程序开发软件,AVR STUDIO软件调试平台。
五、涉及的知识点
AVR单片机I/O口、定时器的原理及其配置、红外传感器原理与运用,C语言程序设计、自动控制原理、运动控制技术、智能控制理论等。
六、实验原理
本实验平台,提供的电路硬件结构及接口与如下所示:
1、电机驱动电路图及AVR单片机的接口见实验2图2.1,在此不再累述。
2、红外传感器电路图及AVR单片机的接口如下图3.1所示,此处要添加红外传感器原理图,
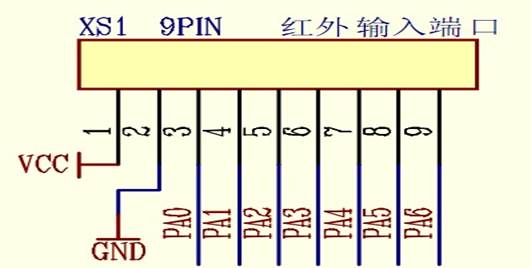
图3.1 红外传感器电路图
七、实验程序
八、思考与拓展
1、如何修改程序或调整参数,使智能小车跟踪轨迹又快又准?
2、如何改进控制策略,做路径规划,并实现最优控制?
第二篇:粉尘与有毒有害气体防治实验指导书及报告
《粉尘与有毒有害气体防治》
实验指导书及报告
(内部资料)
矿业工程学院实验总室
20##年3月
前 言
实验课,是一种重要的教学方式,通过实验,验证其有关理论或为理论建立实践基础,使理论与实践相结合,学习与熟悉实验技能,有助于克服只能动口不能动手的偏向,培养分析问题与解决问题的能力,培养进行科学实验的能力.
为达到上述目的,必须认真参加实验.在实验课中,首先要认真预习实验教材,明确实验目的与要求,了解操作程序及注意事项.实验过程中,应严格遵守纪律,执行操作规定,严肃认真,作好观测与记录,实验后,做好实验报告.
凡参加实验者,各次实验均应遵守下列规则:
1 预习实验指导书,明确实验目的,了解所用仪器与用具及其使用方法.
2 按实验课指定的内容进行实验,各组在指定的实验场地进行实验,不得动用与本实验无关的 设备、仪器等.
3 有关易燃气体的实验,必须统一由教师指挥,各组不得自行通气操作.
4 必须遵守有关安全规程.
5 各实验的特殊规则另行规定.
粉尘与有毒有害气体防治实验指导书及报告
实验一矿尘浓度测定
一实验目的:
矿尘测定的目的,是对矿山各个环境的矿尘状况作出科学的评价,其中包括矿尘组成的成分、矿尘浓度、粒度分布等,也是对防尘措施效果进行检验。
二、测点的选择和布置
为了能客观现实的评价作业场所空气中粉尘含量对人体的危害程度,无采用哪种测定方法,测定粉浓度时,均应把测点布置在尘源回风侧、粉尘扩散得较为均匀的人工呼吸带内。对于薄煤层及其他特殊条件,呼吸带的高度视实际情况而定。
三、矿尘浓测定方法
(一)滤膜采样测定方法
1. 基本原理
滤膜采样测定法的基本原理是利用粉尘采样器抽取一定体积的含尘空气,当含尘空气通过滤膜时,粉尘被阻留在已知质量的滤膜上,根据采样后滤膜质量增加量和通过空气量,即可算出作业场所空气中粉尘的浓度。
2. 必备的仪器、设备及材料
(1) 感量为0.1mg的分析天平1台。
(2) 直径为160mm~200mm的干燥器1个~2个,内装适量的变色硅胶。
(3) 粉尘采样器。测全尘和平呼吸性粉尘的采样器若干台(根据规定配备),采样器必须符合《粉尘采样器通用技术条件》(MT-162)的规定。〕
(4) 气体流量计。用于检测和显示采集尘的采样通过采样器的空气流量,其分度为1L。滤膜采样器上用的流量计的流量范围应为15L/min~40L/min。
(5) 滤膜。应为合成纤维滤膜,用于采集粉尘。滤膜的阻尘率,要求用粒径为0.5um的粉尘进行检验时,应大于等于95%;滤膜受大气中湿度变化影响的质量变化量应小于等于0.1%。
(6) 顶盖内径为35mm的采样头。
(7) 滤膜夹。夹环内径应为31mm,用于固定滤膜。
(8) 空盒气压表。度盘最小分度值为66.66Pa,用于测定测尘点的环境气压。
(9) 干湿温度计。-250C~+510C,用于测定尘点的湿度和温度。
(10)风速表。测量范围为0.3m/s~5m/s,用于测定测尘点的环境风速。
(11) 秒表。用于测尘计时,可选用普通秒表。
(12) 镊子、毛刷等。
3. 滤膜采样测定步骤
(1) 采样地点的粉尘浓度小于100mg/m3时,用直径为40mm的平面滤膜,最大增重不得超过20mg;粉尘浓度大于100mg/m3时,用直径为75mm的漏斗形滤膜。
(2) 测尘工作所用的分析天平,要按计量部门的规定,每年检验1次。
(3) 采样前用镊子取下滤膜两面的夹衬纸,把滤放在天平上称重,并记录下初始质量,然后将滤膜夹(滤膜不得有褶皱,滤膜与滤膜夹之间不得有缝隙),放入带编号的滤膜盒里备用。
(4) 采样时,取出准备好的滤膜夹,固定在采样器上,采样器的受尘面必须迎向风流。
(5) 对连续性产尘作业,应在生产达到正常状态5min后进行采样;对间断性产尘作业,应在工人作业时进行采样。
(6) 根据采样时生产场所的粉尘浓度预计值及滤膜上粉尘应增量的最低值确定采样持续时间,但一般不应少于10min。滤膜上粉尘的增量不应小于1mg。采样持续时间可按下式计算:
(7) 采样流量应为15L/ min~40 L/ min,一般可用25 L/ min。在采样过程中应使流量经常保持稳定,对流量计应半年校正一次。采样时,要按表4-3的格式和要求做好记录。
(8) 采样后,将滤膜固定圈取出,受尘面向上,迅速放入采样盒内,称重分析。
(9) 采样前后的滤膜如被污染或粉尘失落时,应作废重新采样。
(10) 采样前滤膜应置于干燥器内避免受潮。采样后,应将滤膜放在干燥器内干燥2h后称重,此后每干燥30 min后称重一次,重复操作,直至相邻2次质量差不超过0.1mg为止。
4. 滤膜采样测定结果的计算
滤膜采样测定法的最后程序,是应按下式计算出作业场所空气中的粉尘浓度C:
(二)快速测尘仪测定法
采用这种方法能快速直接测定出作业场所的粉尘浓度。测定时应注意如下几点:
(1) 应首先检查仪器内部电池电压,当电压低于使用电压时,应按要求进行充电。
(2) 校正仪器的采样流量和采样时间,并按仪器的使用说明书进行调整。
(3) 测尘开始的时间与滤膜采样去开始采样的时间相同。测尘时仪器的进气口必须迎向风流。
(4) 测尘时,每个测点连续测定的数据不得少于3个,其平均值为测得粉尘浓度值。
实验二、矿尘分散度的测定方法
一、实验目的:
掌握矿尘分散度的测定方法,我们采用计数分散度测定方法。
二、实验的仪器、设备及材料
(1) 放大倍数600倍~675倍的生物显微镜。
(2) 分度值0.01mm的物镜测量。
(3) 目镜测微计。尺形目镜测微计分度值为0.01mm;网形目镜测微计分度值为0.2mm。
(4) 醋酸丁酯。HGB3289-60分析纯。
(5) 容积为25mL的瓷坩锅。
(6) 规格为25mm×25mm的盖玻片。
(7) 规格为75mm×25mmr的载物玻璃片。
(8) 容积为5mL的玻璃吸管。
(9) 计数范围为0~9999的血球分类计数器。
三、粉尘标本制备方法
(1) 测定粉尘计数分散度时用滤膜采样法进行采样。
(2) 具体操作:
① 将采有粉尘的滤膜放在瓷坩锅或小烧杯中;
② 用玻璃吸管向瓷坩锅加入1mL~2mL醋酸丁酯,用玻璃棒充分搅拌,使滤膜并混悬均匀;
③ 用玻璃滴管吸取已溶解混悬均匀的悬浮物,向干燥的载物玻璃片上加一滴,将载物玻璃片平摇数次,使液滴分散,然后用另一载物玻璃片推片,1min后,在载物片上即可出现一层粉尘薄膜;
④ 贴上标签,注明标本编号及采样日期;
⑤ 将标本保留在玻璃器皿中,避免外界粉尘的污染,并准备镜检。如镜检时发现尘粒过多,可加入醋酸丁酯稀释,重新制备标本。
四、测定步骤
(1) 目镜测微计的校正。用物镜测微计校正出目镜测微计每一刻度的长度,校正时观察物镜测微计和目镜测微计两者标尺相生合的两线之间的各自格数,计算出目镜测微计每格代表的实际长度。
(2) 标本的测定。将标本置于显微镜载物台上,用压片固定,使目镜测微计的刻度线正切尘粒的一端,观察尘粒占有目镜测微计的格数,测出尘粒的大小。镜检时应无选择地按顺序逐个测量,并在标本移动方向不变的条件下,遇长径测量长径遇短径测量短径。
(3) 标本的计数。测定粉尘计数分散度时,每一标本需测200粒以上,计数时用血球分类计数器分档排列,如测出1颗2um以下的粉尘,即按第一档1次;1颗大于等于2um~5um的粉尘,即按第二档1次;依此类推。
五、测定结果的计算,测定结果按分4个级到进行统计。
实验三、除尘器性能参数测定
一、实验目的
掌握除尘器的评定指标(除尘效率,阻力,经济性等),除尘效率计算(总效率,分级效率),除尘机理及除尘器的分类。旋风除尘器结构与原理、流场分析、参数计算,影响旋风除尘器性能的因素,旋风除尘器类型及适用性;湿式除尘原理,除尘效率计算,湿式除尘器的类型及结构、特点。袋式除尘器的除尘机理、性能参数计算,袋式除尘器的基本结构,常用袋式除尘器类型及特点。
二、实验仪器
1、 袋式除尘器
2、旋风除尘器
三、实验内容
1室内空气中含尘浓度或有害气体浓度与排放浓度的测定;
2 吸气罩罩口气流特性的测定;
3除尘器阻力和除尘效率的测定;
四、实验结果计算
五、实验分析
实验四、甲醛浓度测定
一、实验目的
掌握甲醛浓度测定方法,室内甲醛超标会对人的健康造成严重影响。
二、甲醛的危害:
甲醛对人体健康的影响主要表现在嗅觉异常、刺激、过敏、肺功能异常、肝功能异常和免疫功能异常等方面。其浓度在每立方米空气中达到0.06 -0.07 mg/ m3时,儿童就会发生轻微气喘。当室内空气中甲醛含量为0.1 mg/m3时,就有异味和不适感;达到0.5 mg/m3时,可刺激眼睛,引起流泪;达到0.6 mg/m3,可引起咽喉不适或疼痛。浓度更高时,可引起恶心呕吐,咳嗽胸闷,气喘甚至肺水肿;达到30 mg/m3时,会立即致人死亡。但由于甲醛具有较强的粘合性和防虫功能,劣质家具中大量使用的人造板、粘合剂、油漆涂料中含量很高,且其释放期长达3-15年之久。
三、实验原理
甲醛气体经气泵吸入与传感器储气室与电化学传感器敏感电极接触,并发生电化学反应,输出稳定的电信号,电信号经中央处理器处理气体浓度值可用数字准确地显示在液晶屏幕上。
四、实验仪器参数
1、醛检测仪采用国家标准单位mg/m3,不需要mg/m3和ppm换算;
2、可以在污染的环境中回零,不需要活性炭过滤回零;
3、电化学传感器超长使用寿命,达5年以上;
4、电化学传感器免维护,不需要注水维护;
5、电化学传感器灵敏度大于扩散性传感器的200倍;可以检测出更低浓度的甲醛分子,
数字显示为0.00mg/m3-9.99mg/m3,比为0.00mg/m3-19.99mg/m3更为精确,
6、B-TEST挡可以检测电化学传感器使用寿命;
7、CN4160型甲醛检测仪电化学传感器为独特的二电极传感器,不需要独立基准电压参考,不需要独立电池供电;
8、检测方式:泵吸式 ,显示方式:三位数字式大屏幕高亮LED数码显示, 直接读数
9、检测范围:0.00--10.00mg/m3 显示单位:国家标准单位mg/m3,不需要mg/m3和ppm换算 ,分辨率:0.01 ,测量精度:0.01mg ,最小检测:0.01mg/m3 ,响应性 <10S ,零点漂移:±1%F.S 电源:DC12V1800mA大容量锂离子可充电电池。
五、实验结果
实验五、空气质量检测
一实验目的
掌握空气质量检测原理及仪器的使用方法。
二、室内空气质量标准
1、指室内空气中与人体健康有关的物理、化学、生物和放射性参数、可吸入颗粒物,指悬浮在空气中,空气动力学当量直径小于等于10um的颗粒物,总挥发性有机化合物标准状态
三、常见的室内空气污染物
1、从建筑装修材料中释放出的甲醛、挥发性有机化合物(VOC)、苯、甲苯、氨和氡气;
2、 从日用品(如化妆品、杀虫剂、清洁剂等)所含的挥发性有机化合物;
3、办公职场新风量、菌落总数和可吸入颗粒物等职业卫生安全关键指标;
4、 二氧化碳及从人类、宠物和植物排出的生物污染物;
四、检测项目
1、氡气
氡气是一种无色无味的放射性气体,是由含花岗石的混凝土建筑物料释放出来的。如居所的通风系统不佳,氡气可以积聚至一个很高的浓度;接触高浓度的氡气及其衰变产品,可能会增加患肺癌的机会。
2、挥发性有机化合物
有些日用品含有如苯、甲苯和二甲苯一类的挥发性有机化合物。使用这类物品来为墙壁扫漆或脱漆,挥发性有机化合物可以积聚至一个很高的浓度,这样会使人感到不适,更严重的可能会引致癌病。
3、甲醛
室内所排放的甲醛,主要来自一些用 甲醛树脂作黏合或外层物料的木制家俬;其它来源则包括用气体燃料煮食、烧香、铺地毡等活动。高浓度的甲醛会引致眼睛、鼻子和喉咙不适。
4、二氧化碳
所有生物均会呼出二氧化碳;如室内含有高浓度的二氧化碳,即表示没有足够的新鲜空气。
5、生物污染物
生物污染物包括细菌、真菌和体积极微小但可引致过敏反应的物质如尘埃等。
6、二手烟
二手烟包括从燃点着的香烟、烟斗或雪茄飘散出来的烟雾及吸烟者抽烟时呼出之气体。它是一种含有超过 4,000 种化学物的复杂混合物。二手烟是一种令人产生强烈反应及公认的致癌物质。它可引致眼睛、鼻子或喉咙不适,亦可能大幅增加患癌和其它呼吸疾病的机会。
五、实验结论
实验六、闪点和燃点测定
一、实验目的
掌握闪点和燃点测定原理及仪器的使用方法。
二、实验基本知识
闪点就是可燃液体或固体能放出足量的蒸气并在所用容器内的液体或固体表面处与空气组成可燃混合物的最低温度。可燃液体的闪点随其浓度的变化而变化。
闪点又叫闪燃点,是指可燃性液体表面上的蒸汽和空气的混合物与火接触而初次发生闪光时的温度。各种油品的闪点可通过标准仪器测定。液体挥发的蒸气与空气形成混合物遇火源能够闪燃的最低温度采用闭杯法测定。闪点温度比着火点温度低些。从消防观点来说,液体闪点就是可能引起火灾的最低温度。闪点越低,引起火灾的危险性越大。
燃点又叫着火点,是指可燃性液体表面上的蒸汽和空气的混合物与火接触而发生火焰能继续燃烧不少于5s时的温度。可在测定闪点后继续在同一标准仪器中测定。可燃性液体的闪点和燃点表明其发生爆炸或火灾的可能性的大小,对运输、储存和使用的安全有极大关系。
闪点是指石油产品在规定条件下,加热到它的蒸汽与火焰接触发生瞬间闪火时的最低温度。油品越轻,闪点越低。油品的危险等级是根据闪点来划分的。从闪点可判断油品组成的轻重,鉴定油品发生火灾的危险性。用闭口闪点测定器测定的闪点称闭口闪点,一般用以测定轻质油品。闪点越高越安全。 闪点是表示石油产品蒸发倾向和安全性质的项目。油品的危险等级是根据闪点划分的,闪点在45℃以下的叫易燃品;45℃以上的为可燃品。在储存使用中禁止将油品加热到它的闪点,加热的最高温度,一般应低于闪点燃20~30℃。 在油品使用过程中,闪点也有重要意义。例如:使用中的发动机油闪点显著降低时,说明发动机油已受到燃料稀释,应对发动机进行检修和换油。
在规定的条件下,加热润滑油,当油温达到某温度时,润滑油的蒸气和周围空气的混合气,一旦与火焰接触,即发生闪火现象,最低的闪火温度,称为润滑油的闪点。选用润滑油时,应根据使用温度考虑润滑油的闪点高低,一般闪点应比使用温度高20至30度,以保证使用安全和减少挥发损失。
三、实验仪器
闪点和燃点测定仪。
四、实验结果
实验七、氧指数测定
一、实验目的
掌握氧指数仪测定方法及工作原理。
二、实验仪器及设备
1、传感器及钢瓶
2、氧指数仪测定仪
3、记录装置 如显示器等
4、电缆
5、标定设备
三、实验方法及步骤
1、把选择的传感器,安装在仪器上。
2、连接传感器与仪器之间的线路。
3、安装并调试测试仪。
4、开始测量。
四、分析计算
实验八、放射性氡检测
一、实验目的
1、掌握放射性氡检测仪的使用方法及工作原理。
2、了解传感器的工作原理。
3、熟悉测量的全过程及数据处理。
二、实验仪器及设备
1、传感器 内有放射性物质及相应防震和密封措施
2、放射性氡检测仪 如FD-3017型
3、记录装置 如显示器等
4、电缆
5、标定设备
三、实验框图
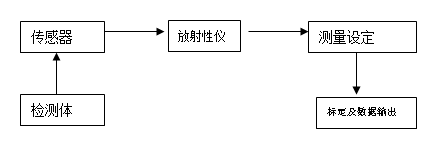
四、实验原理
根据探头测量到放射性物质,即由探头产生的反应,经过光电倍增把传感器变化显示为电压信号,再经过网络变换成所需的数值显示。
五、实验方法及步骤
1、把选择的传感器,并安装在铅套上。
2、连接传感器与辐射仪之间的线路。
3、安装并调试放射性仪。
4、开始测量。
六、仪器测量应用
1、应用于石材放射性的检测
2、应用于放射性环境的检测
3、应用于海关、码头放射性的检测
实验九、硫化物的测定
一、实验目的
掌握烟尘气体的测定方法。掌握应用测定有毒气体仪器的原理及方法。
二、 实验内容
1、烟尘气体中硫化氢含量的快速测定
2、烟尘气体中二氧化硫含量的快速测定
三、 实验所需设备品
硫化氢检定器、二氧化硫检定器。
四、 利用有毒有害气体检定管测定有毒有害气体含量
1 原理
在检定管内装有化学指示剂。当有毒气体流经检定管时,便与化学指示剂迅速反应并变色。变色的长度或深度与含毒气体的流速、流量剂有毒气体的浓度有关。当流速、总流量一定时,据变色的长度或深度可确定有毒气体的浓度。
2 具体操作
(1) 将检定器开关放水平位置。在前部接头处接胶管通向测定地点,抽气50毫升。为消除影响往复抽取2~3次。
(2) 将检定管两端用锉刀打开,安装在检定器上部接头上,并将开关扭向垂直位置。如含其他成分应在检定管与抽气即筒之间加过滤管。
(3) 以检定管要求的速度如50ml/100sec,以100秒时间使50 毫升气体均匀通过检定管。
(4) 观察检定管的变色长度读出H2S、SO2含量mg/m3。
注:
检定管标定的浓度有的是重量浓度,有的是体积百分比浓度。其换算关系如下:
式中: D为重量浓度mg/M3;
C为体积百分比浓度(%);
M为有毒气体分子量。
实验十、氮氧化物的测定
一、实验目的
掌握氮氧化物的测定方法。掌握应用测定氮氧化物仪器的原理及方法。
二、 实验内容
1、烟尘气体中一氧化氮含量的快速测定。
2、烟尘气体中二氧化氮含量的快速测定
三、 实验所需设备品
一氧化碳检定器、一氧化氮检定器、硫化氢检定器、二氧化硫检定器。
四、 利用有毒有害气体检定管测定有毒有害气体含量
1 原理
在检定管内装有化学指示剂。当有毒气体流经检定管时,便与化学指示剂迅速反应并变色。变色的长度或深度与含毒气体的流速、流量剂有毒气体的浓度有关。当流速、总流量一定时,据变色的长度或深度可确定有毒气体的浓度。
2 具体操作
(5) 将一氧化氮检定器开关放水平位置。在前部接头处接胶管通向测定地点,抽气50毫升。为消除影响往复抽取2~3次。
(6) 将检定管两端用锉刀打开,安装在一氧化氮检定器上部接头上,并将开关扭向垂直位置。如含其他成分应在检定管与抽气即筒之间加过滤管。
(7) 以检定管要求的速度如50ml/100sec,以100秒时间使50 毫升气体均匀通过检定管。
(8) 观察检定管的变色长度读出CO含量mg/m3。
注:
检定管标定的浓度有的是重量浓度,有的是体积百分比浓度。
五、浓度mg/m3 与PPm单位体积内所含污染物的质量数(国家标准),单位换算公式:

A:气体浓度mg/m3
X:气体浓度 ppm
M:物质的分子量
22.4:标况下(0℃,1atm)气体的摩尔体积
实验一 矿尘浓度测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验二 分散度测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验三、除尘器性能参数测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验四、甲醛浓度测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验五、空气质量检测
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验六、闪点和燃点测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验七、氧指数测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验八、放射性氡检测
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验九、硫化物的测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
实验十、氮氧化物的测定
实验日期 指导教师 成绩
一、实验目的
二、实验原理
三、实验结果
四、实验中发现的现象及分析
-
ERP实验报告 总结
ERP实验报告总结通过这次的实战演练,我真的是学到了很多。企业的发展其实就是在求生存,为了生存,为了能在高手林立,变幻莫测的商场中…
-
实验报告总结
实验报告书姓名:学号:专业:系部:指导教师:20xx年x月x日一、实验时间:20xx年x月—5月二、实验地点:三、实验目的:1、通…
-
无机实验报告总结
无机化学实验总结通过对传统无机化学中化合物的性质、合成、反应、分析等方面的接触,学习了很多相关内容,如热力学、动力学、波谱学等。同…
-
审计实验报告总结
审计作为应用性很强的一门学科、一项重要的经济管理工作,是加强经济管理,提高经济效益的重要手段,经济管理离不开审计,经济越发展审计工…
-
实 验 报 告 总 结
——在低年级加强写字指导的研究龙村镇第二小学温珺人类步入信息时代,文化的传播与交流方式产生了翻天覆地的变化。随着键盘敲击的速度越来…
-
创新实验项目个人总结
经历了项目立项之初大家确定项目立意点的思考,到确定项目,立项审查的波折,然后是项目中期检查的慌乱,而后是后期分析整理与最终项目结题…
-
大学生校级创新实验项目个人总结
个人总结历时一年多,“大学生创新实验计划”就要结题了。经过创新小组成员的共同努力我们的项目基本取得了预期的成果。回想过去一年里参加…
-
校级创新实验项目个人总结
校级创新项目个人总结在繁忙的大三学习中,我能够在创新实验中坚持到了最后,我感到有一种成就感。通过参加此次安徽大学校级大学生创新项目…
-
20xx年大学生创新性实验项目个人总结
通过参加这次大学生创新性实验,让我受益匪浅。从项目立项之初我们确定项目立意点的思考,到确定项目,撰写项目申请书,立项审查的波折,确…
-
创新实验项目个人总结
创新实验项目个人总结项目名称:环丙烯与噻吩的交叉偶联项目编号:20xx10422026起止时间:20xx.5-20xx.5项目负责…
- 广东海洋大学微型计算机基础中断及优先级实验报告