全国大学生电子设计竞赛—设计总结报告字体要求
 设计总结报告字体要求
设计总结报告字体要求
一级标题:小二号黑体,居中占五行,标题与题目之间空一个汉字的空。
二级标题:三号标宋,居中占三行,标题与题目之间空一个汉字的空。
三级标题:四号黑体,顶格占两行,标题与题目之间空一个汉字的空。
四级标题:小四号粗楷体,顶格占一行,标题与题目之间空一个汉字的空。
标题中英文字体均采用“Times New Roman”,字号同标题字号。(此处为四号字)
四级标题以下的分级标题:五号标宋。
图序、图题:小五号宋体,居中排于图的正下方。
表序、标题:小五号黑体,居中排于表的正上方。
图和表中的文字:六号宋体。表格四周封闭,表跨页时另起表头。
图和表的注释、注脚:六号宋体。
数学公式居中排,公式中字母正斜体和大小写前后要统一。
第二篇:全国大学生电子设计竞赛报告
20xx年全国大学生电子设计竞赛
简易倒立摆及其控制装置(C题)
【河马 组】
20xx年3月6日

I
目 录
1系统方案........................................................................................................................................ 1
1.1动力模块的论证与选择 ..................................................................................................... 1
1.2传感器模块的论证与选择 ................................................................................................. 1
1.3 控制系统的论证与选择 .................................................................................................... 1
2系统理论分析与计算 .................................................................................................................... 1
2.1 竖杆位置的计算 .............................................................................................................. 1
2.1.1 编码器的原理 ......................................................................................................... 1
2.1.2 竖直位置的计算 ..................................................................................................... 1
2.2 PID的计算 ......................................................................................................................... 2
2.2.1 PID的计算方法 ...................................................................................................... 2
3电路与程序设计 ............................................................................................................................ 2
3.1电路的设计 ......................................................................................................................... 2
3.1.1系统总体框图 .......................................................................................................... 2
3.1.2 主控子系统电路原理图 ....................................................... 错误!未定义书签。
3.1.3电源 .......................................................................................................................... 3
3.2程序的设计 ......................................................................................................................... 3
3.2.1程序功能描述与设计思路 ...................................................................................... 3
3.2.2程序流程图 .............................................................................................................. 4
4测试方案与测试结果 .................................................................................................................... 4
4.1测试方案 ............................................................................................................................. 4
4.2 测试条件与仪器 ................................................................................................................ 5
4.3 测试结果及分析 ................................................................................................................ 5
4.3.1测试结果(数据) ....................................................................................................... 5
4.3.2测试分析与结论 ...................................................................................................... 5
附录1:电路原理图 ........................................................................................................................ 6
附录2:源程序 ................................................................................................................................ 7
II
简易倒立摆及其控制装置(C题)
【2组】
1系统方案
本系统主要由主控模块、动力模块、传感器模块、电源模块组成,下面分别论证这几个模块的选择。
1.1 动力模块的论证与选择
方案一:舵机。舵机的可以精准控制角度,缺点是反应速度比较慢,不能及时调整臂的位置。 方案二:采用步进电机。步进电机具有动态响应快、易于起停,易于正反转及变速的优点。但缺点是它以步进式跟进,角度小于一个步距角时是系统响应盲区,而且经过测试步进电机在控制旋转臂时,抖动性大并且容易出现卡顿现象,所以不适合单摆的控制。
方案三:采用直流减速电机。扭矩大,体积小,驱动电路简单,稳定强,负载能力强等优点。 综合以上三种方案,选择方案三。
1.2传感器模块的论证与选择
方案一:采用通过电位器来判断竖杆位置。采集电位器分担的电压,通过主控的AD转换,再用算法计算出竖杆的位置,但电位器不是很精确,容易造成误判,因此放弃此方案。
方案二:采用通过增量式编码器来判断竖杆位置,采集编码器两根信号线输出的高电平次数,通过主控的定时器来采集,主控有专门的编码器端口,且编码器很精确,完全能满足系统要求。
方案三:采用线性CCD来判断竖杆位置,线性CCD可以分辨出竖杆的位置,颜色,角度等数据,但编程复杂,所以放弃此方案
综合以上三种方案,选择方案二。
1.3 控制系统的论证与选择 方案一:采用STC89C52单片机。STC系列单片机具有低功耗、高速度、超强抗干扰等优点,具有具有32K可编程Flash存储器
方案二:采用STC12C5A60S2单片机本身带有有8路十位AD转换和2路PWM,而且处理速度比一般单片机要快。
方案三:采用stm32f407单片机。此单片机功能齐全且强大,满足本设计的所有要求,因此采用stm32f407作为主控制器。
2系统理论分析与计算
2.1 竖杆位置的计算
2.1.1编码器的原理
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增 1
量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。编码器(图1)
2.1.2竖杆位置的计算
我们采用的编码器是400线程的增量式编码器,经过4分频处理后,编码器转一圈会返回1600个脉冲,通过主控的定时器来采集编码器输出的脉冲数,初始位置脉冲数为0,中间位置(即完全竖直状态),脉冲数为800.,下一步采用PID闭环控制来保持杆的竖直。
2.2 PID的计算

3电路与程序设计
3.1电路的设计
3.1.1系统总体框图
系统总体框图如图1所示。
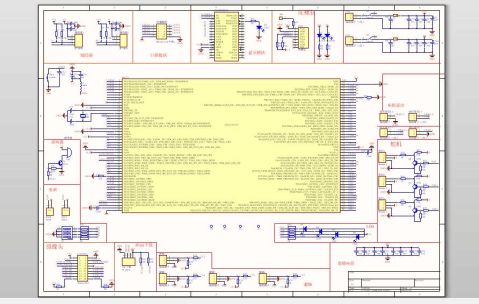
3.1.2 主控子系统电路原理图
1、主控子系统电路 图1 系统总体框图
2
图2 主控子系统电路
3.1.3驱动子系统电路原理图
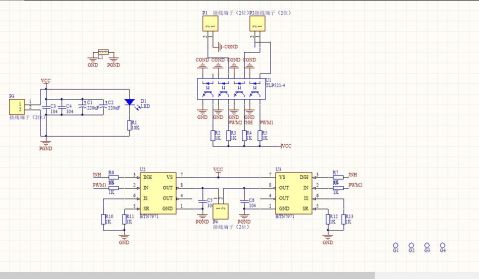
图3 驱动子系统电路
3.1.4电源
电源由锂电池和学生电源组成。为整个系统提供的正常稳定工作。这部分电路比较简单,故不作详述。 5V或者12V电压,确保电路
3.2程序的设计
3.2.1程序功能描述与设计思路
1、程序功能描述
3
程序主要用编码器作为传感器采集杆所在的位置,并采用PID算法控制电机的转动来保持平衡。
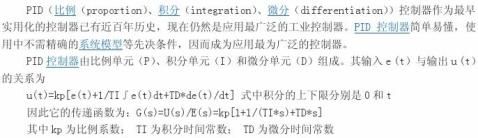
2.2、PID算法设计
在该设计中,算法的设计是很关键的一步,算法精确度选取的好坏,直接影响到系统运行的准确性。在比较自适应算法和PID算法后,采用PID算法。
经过几天的调试,得出我们的PID公式为 :
PID_Output = (Kp*Error + Kd*(Error - Pre_Error))+Ki*Ints/155;
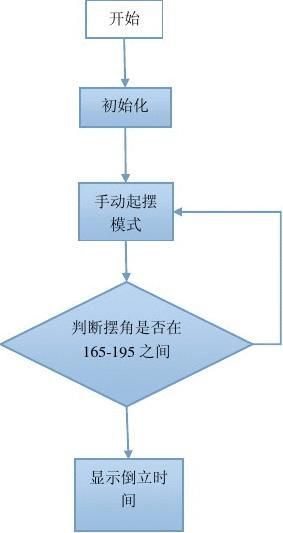
3.2.2程序流程图
1、程序流程图
4测试方案与测试结果
4.1测试方案
1、硬件测试
2、软件仿真测试
3、硬件软件联调
4
4.2 测试条件与仪器
测试条件: 测试仪器:
4.3 测试结果及分析
4.3.2测试分析与结论
根据上述测试数据,由此可以得出以下结论:
1、 2、 3、
综上所述,本设计达到设计要求。
5
附录1:电路原理图
6
附录2:源程序
7
-
报告字体有什么规定
报告字体有什么规定一般无特殊要求以下可供参考页面设置为纸张A4纸页边距上3下2左3右2正文标题为黑体二号署名为楷体三号正文为宋体四…
-
工作总结的字体和格式要求
标题╳╳╳个人总结(黑体小二)正文╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳(仿宋小三号)一、一级标题…
-
调查报告写作格式字体要求(2)
书写调查报告的格式字体要求第一部分必须包括(空一行)标题(黑体、居中、三号字)导语或摘要(四号黑体)(空一格)打印内容(四号宋体,…
- 学校公文格式模版
-
实践报告格式、字体、字号要求
《思想道德修养与法律基础》课社会实践报告(字号二号,黑体,居中)调研内容:大学生就业形势;大学生择业观念、就业心理(字号三号,黑体…
-
规范工作总结字体和格式
工作总结的字体和格式要求标题╳╳╳个人总结(黑体小二)正文╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳(…
-
工作总结的字体和格式要求
标题╳╳╳个人总结(黑体小二)正文╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳(仿宋小三号)一、一级标题…
-
工作总结字体和格式
工作总结的字体和格式要求标题╳╳╳个人总结(黑体小二)正文╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳…
-
关于规范工作总结字体和格式的通知
集团各部门员工:为规范统一员工工作总结的书写,现将工作总结的字体和格式要求(见附件1)公布,并将20xx年上半年度工作总结中的优秀…
-
工作总结文字表述的要求
公文写作:工作总结文字表述的要求1、要善于抓重点总结涉及本单位工作的方方面面,但不能不分主次、轻重、面面俱到,而必须抓住重点。什么…
-
大学生电子设计竞赛总结
在这个金秋之际,我们代表着我们自己的学校踏上了xxxx年xx大学生电子设计竞赛的征途。在这个激烈的过程中,我们知道了许多,成长了许…