操作系统实验报告
操作系统实验报告
20##年12月25日
实验一 线程的状态和转换(5分)
1 实验目的和要求
目的:熟悉线程的状态及其转换,理解线程状态转换与线程调度的关系。
要求:
(1)跟踪调试EOS线程在各种状态间的转换过程,分析EOS中线程状态及其转换的相关源代码;
(2)修改EOS的源代码,为线程增加挂起状态。
2 完成的实验内容
2.1 EOS线程状态转换过程的跟踪与源代码分析
(分析EOS中线程状态及其转换的核心源代码,说明EOS定义的线程状态以及状态转换的实现方法;给出在本部分实验过程中完成的主要工作,包括调试、跟踪与思考等)
EOS定义的线程状态在ps/psp.h的THREAD_STATE枚举中,包含Zero(线程状态转换过程中的中间状态)、Ready(就绪)、Running(运行)、Waiting(等待)、Terminated (结束)。
线程在不同的状态间相互转换时,通过调用ps/sched.c文件中的下面几个函数完成:PspReadyThread(将指定线程插入其优先级对应的就绪队列的队尾,并修改其状态码为Ready)、PspUnreadyThread(将指定线程从就绪队列中移除,并修改其状态码为Zero)、PspWait(将当前运行线程插入指定等待队列的队尾,并修改状态码为Waiting,然后执行线程调度)、PspUnwaitThread(将阻塞线程从其所在的等待队列中移除,并修改其状态码为Zero)、PspWakeThread(调用PspUnwaitThread 函数使线程脱离阻塞状态,然后调用PspReadyThread函数使线程进入就绪状态,从而唤醒被阻塞的线程)、PspSelectNextThread(使被抢先的线程从运行状态进入就绪状态,并决定哪个就绪线程应该进入运行状态)。
实验中通过对上述函数添加断点,通过EOS的loop命令观察线程状态的变化、使用pt命令查看各线程状态。
2.2为线程增加挂起状态的实现
(给出实现方法的简要描述、源代码、测试和结果等)
在psp.h中为THREAD_STATE添加Hang作为挂起状态的标志:
typedef enum _THREAD_STATE {
Zero, // 0
Ready, // 1
Running, // 2
Waiting, // 3
Terminated, // 4
Hang // 5
} THREAD_STATE;
修改psspng.c中PsSuspendThread函数如下:
{
STATUS Status;
BOOL IntState;
PTHREAD Thread;
Status = ObRefObjectByHandle(hThread, PspThreadType, (PVOID*)&Thread);
if (EOS_SUCCESS(Status)) {
IntState = KeEnableInterrupts(FALSE);
if (Ready == Thread->State) {
PspUnreadyThread(Thread);
Thread->State = Hang; //修改为挂起状态
ListInsertTail(&SuspendListHead, &Thread->StateListEntry);
Status = STATUS_SUCCESS;
} else {
Status = STATUS_NOT_SUPPORTED;
}
KeEnableInterrupts(IntState);
ObDerefObject(Thread);
}
return Status;
}
修改PsResumThread函数如下:
STATUS Status;
BOOL IntState;
PTHREAD Thread;
Status = ObRefObjectByHandle(hThread, PspThreadType, (PVOID*)&Thread);
if (EOS_SUCCESS(Status)) {
IntState = KeEnableInterrupts(FALSE);
if (Hang == Thread->State) {
Thread->State = Zero; //恢复为zero状态
ListRemoveEntry(&Thread->StateListEntry); //从挂起列队删除
PspReadyThread(Thread); //加入到就绪列队
PspThreadSchedule(); //调度线程
Status = STATUS_SUCCESS;
} else {
Status = STATUS_NOT_SUPPORTED;
}
KeEnableInterrupts(IntState);
ObDerefObject(Thread);
}
return Status;
}
在sysproc.c中修改ConsoleCmdProcAndThread函数为pt命令添加Hang显示:
switch(pThread->State) {
case Zero:
ThreadState = "Zero ";
break;
case Ready:
ThreadState = "Ready ";
break;
case Running:
ThreadState = "Running ";
break;
case Waiting:
ThreadState = "Waiting ";
break;
case Terminated:
ThreadState = "Terminated";
break;;
case Hang:
ThreadState = "Hang";
break;;
default:
ThreadState = "Undefined ";
}
测试用suspend命令挂起loop命令的线程后,loop的循环暂停。pt中查看loop的线程状态变为Hang。之后用resume命令恢复loop线程,循环恢复,pt中查看loop线程状态为Ready。
3 其他需要说明的问题
在pt中还列出了loop的31号线程以外的多个系统线程。其中loop线程状态不是Running而是Ready是因为EOS是单处理器系统,执行pt命令时pt的线程成为Running而loop线程进入就绪状态变为Ready。
EOS使用KeEnableInterrupts开关中断来实现原语操作。
实验二 进程的同步(7分)
1 实验目的和要求
目的:理解进程同步的原理和意义,掌握信号量的实现方法和应用。
要求:
(1)使用EOS的信号量,实现生产者-消费者问题;
(2)跟踪调试EOS信号量的工作过程,分析EOS信号量实现的源代码;
(3)修改EOS信号量的实现代码,使之支持等待超时唤醒和批量释放功能。
2 完成的实验内容
2.1 使用EOS的信号量实现生产者-消费者问题
(简要说明使用EOS的信号量解决生产者-消费者问题的实现方法;给出在本部分实验过程中完成的主要工作,包括调试、跟踪、测试与思考等)
EOS使用CreateThread函数创建线程,使用CreateMutex、CreateSemaphore创建信号量。WaitForSingleObject与ReleaseMutex、ReleaseSemaphore函数相当于P、V原语。
实验通过跟踪调试试验程序pc.c观察EOS的进程同步方法。pc.c实现的生产者-消费者如下图。

2.2 EOS信号量工作过程的跟踪与源代码分析
(分析EOS信号量实现的核心源代码,简要阐述其实现方法;给出在本部分实验过程中完成的主要工作,包括调试、跟踪与思考等)
EOS的P、V原语实现是PsWaitForSemaphore、PsReleaseSemaphore,这两个函数使用KeEnableInterrupts开关中断来实现原语操作。
EOS通过CreateMutex、CreateSemaphore创建信号量,有两种状态signaled和nonsignaled,线程对处于nonsignaled状态的同步对象执行Wait操作将会被阻塞,直到同步对象的状态变为signaled。
2.3支持等待超时唤醒和批量释放功能的EOS信号量实现
(给出实现方法的简要描述、源代码、测试和结果等)
修改PsWaitForSemaphore函数如下添加支持超时。
STATUS
PsWaitForSemaphore(
IN PSEMAPHORE Semaphore,
IN ULONG Milliseconds
)
{
BOOL IntState;
ASSERT(KeGetIntNesting() == 0);
IntState = KeEnableInterrupts(FALSE);
STATUS ret;
if (Semaphore->Count > 0) {
Semaphore->Count--;
ret = STATUS_SUCCESS;
} else {
ret = PspWait(&Semaphore->WaitListHead, Milliseconds);
}
KeEnableInterrupts(IntState); /
return ret;
}
修改PsReleaseSemaphore函数如下添加批量释放支持。
STATUS
PsReleaseSemaphore(
IN PSEMAPHORE Semaphore,
IN LONG ReleaseCount,
OUT PLONG PreviousCount
)
{
STATUS Status;
BOOL IntState;
IntState = KeEnableInterrupts(FALSE);
if (Semaphore->Count + ReleaseCount > Semaphore->MaximumCount) {
Status = STATUS_SEMAPHORE_LIMIT_EXCEEDED;
} else {
if (NULL != PreviousCount) {
*PreviousCount = Semaphore->Count;
}
int i;
for(i = ReleaseCount; i--;) {
Semaphore->Count++;
if (Semaphore->Count <= 0) {
PspWakeThread(&Semaphore->WaitListHead, STATUS_SUCCESS);
}
}
PspThreadSchedule();
Status = STATUS_SUCCESS;
}
KeEnableInterrupts(IntState);
return Status;
}
修改后使用新的pc.c进行测试,生产者会提示“Producer wait for empty semaphore timeout”说明超时唤醒成功,消费者会提示“Consumer wait for full semaphore timeout"直到一次消费2个产品说明批量释放成功。
3 其他需要说明的问题
实验三 时间片轮转调度(5分)
1 实验目的和要求
目的:理解进程(线程)调度的执行时机和过程,掌握调度程序实现的基本方法。
要求:
(1)跟踪调试EOS的线程调度程序,分析EOS基于优先级的抢占式调度的源代码;
(2)修改EOS的调度程序,添加时间片轮转调度。
2 完成的实验内容
2.1 EOS基于优先级的抢占式调度工作过程的跟踪与源代码分析
(分析EOS基于优先级的抢占式调度的核心源代码,简要阐述其实现方法;给出在本部分实验过程中完成的主要工作,包括调试、跟踪与思考等)
实验使用EOS提供的rr命令观察时间片的轮转。
EOS创建一个PspReadyListHeads数组保存32个双向链表头实现有32个优先级的优先级队列管理。同时,EOS用PspReadyBitmap描述32位就绪位图来说明非空就绪列队。
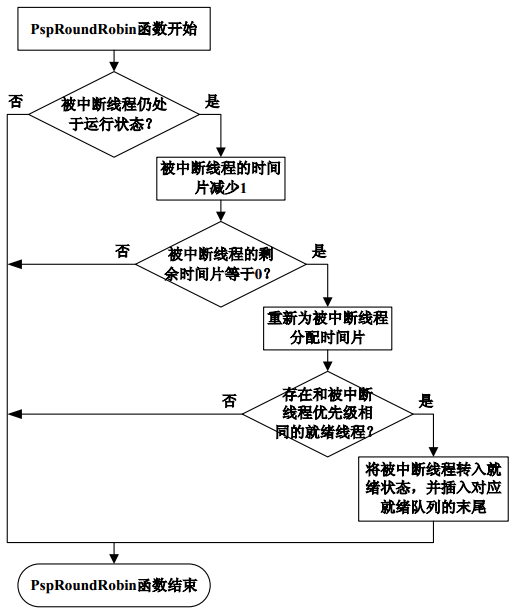
EOS使用Interrupt函数进行统一的中断处理,在其中使用PspSelectNextThread函数完成线程的调度。调度过程如下图:

2.2为EOS添加时间片轮转调度的实现
(给出实现方法的简要描述、源代码、测试和结果等)
修改PspRoundRobin函数如下:
VOID
PspRoundRobin(
VOID
)
{
if (NULL == PspCurrentThread || Running != PspCurrentThread->State) {
return;
}
PspCurrentThread->RemainderTicks--;
if(PspCurrentThread->RemainderTicks > 0) {
return;
}
PspCurrentThread->RemainderTicks = TICKS_OF_TIME_SLICE;
if(0 == BIT_TEST(PspReadyBitmap, PspCurrentThread->Priority)) {
return;
}
PspReadyThread(PspCurrentThread);
return;
}
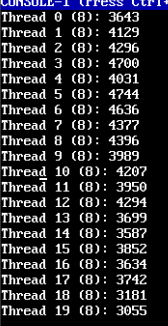
修改后rr命令能够进行20个线程的轮转。
3 其他需要说明的问题
第二篇:操作系统实验报告三
《操作系统原理》实验报告
实验序号: 三 实验项目名称:Windows基本进程管理

-
操作系统实验报告 完全版
《计算机操作系统》实验报告班级:姓名:学号:实验一进程控制与描述一、实验目的通过对Windows2000编程,进一步熟悉操作系统的…
-
操作系统实验报告
操作系统实验报告实验名称理解UNIXLINUXShell及UNIX的进程树成绩专业班级计科姓名学号联系电话实验日期20xx年12月…
-
操作系统实验报告
目录实验一进程的创建2实验二进程控制3实验三进程的管道通信4实验四消息通信6实验五进程调度算法8实验六FIFO页面置换算法12实验…
-
操作系统实验报告
操作系统实验报告学号姓名班级实验一实验报告实验名称并发程序设计实验1实验目的掌握在程序中创建新进程的方法观察并理解多道程序并发执行…
-
计算机操作系统课程设计报告
《操作系统原理》实验报告院(部):管理工程学院专业:信息管理与信息系统实验项目:实验一二三五班级:信管102姓名:学号:目录引言.…
-
操作系统实验心得
1-1:通过这次小实验,是我更加了解Linux一些常用指令的操作以及其作用,对于一个刚开始接触lniux操作系统的初学者来说非常有…
-
操作系统实验总结
学号:姓名:班级:在本学期的计算机操作系统这门课学习当中,为了更好的了解操作系统相关知识,我们通过OSLab平台做了几个实验。在实…
-
操作系统实验报告 完全版
《计算机操作系统》实验报告班级:姓名:学号:实验一进程控制与描述一、实验目的通过对Windows2000编程,进一步熟悉操作系统的…
-
操作系统实验总结
操作系统实验总结学号学生姓名专业班级111进程创建UNIX中进程既是一个独立拥有资源的基本单位又是一个独立调度的基本单位一个进程实…
-
操作系统实验报告
武汉理工大学学生实验报告书实验课程名称操作系统开课学院计算机科学与技术学院指导老师姓名刘军学生姓名学生专业班级20xx20xx学年…
- 操作系统课程设计个人心得