ansys坐标系的总结
ANSYS坐标系总结
直角坐标系
在平面内画两条互相垂直,并且有公共原点的数轴。其中横轴为X轴,纵轴为Y轴。这样就说在平面上建立了平面直角坐标系,简称直角坐标系。 平面极坐标系
坐标系的一种。在平面上取一定点o,称为极点,由o出发的一条射线ox,称为极轴。对于平面上任意一点p,用ρ表示线段op的长度,称为点p的极径或矢径,从ox到op的角度θε[0,2π],称为点p的极角或辐角,有序数对(ρ,θ)称为点p的极坐标。极点的极径为零,极角不定。除极点外,点和它的极坐标成一一对应。
柱面坐标系
柱坐标系中的三个坐标变量是 r、φ、z。与直角坐标系相同,柱坐标系中也有一个z变量。各变量的变化范围是:0 ≤ r < +∞,
0 ≤φ≤ 2π
-∞<z<+∞
其中
x=rcosφ
y=rsinφ
z=z 球坐标系(空间极坐标系)
球坐标是一种三维坐标。
设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,φ,θ来确定,其中r为原点O与点P间的距离,θ为有向线段与z轴正向所夹的角,φ为从正z轴来看自x轴按逆时针方向转到有向线段的角,这里M为点P

在xOy面上的投影。这样的三个数
r,φ,θ叫做点P的球面坐标,
x=rsinθcosφ
y=rsinθsinφ
z=rcosθ
ANSYS坐标系以及工作平面的具体说明
ANSYS中定义点(K)的坐标是在当前激活的坐标系(CSYS)中进行,包括由点生成线,与工作平面的位置以及全局坐标系无关。而体(V)是在工作平面内(WP)进行,不依赖于当前激活的坐标系以及全局坐标系。 ▲ANSYS中定义局部坐标系是通过LOCAL命令:LOCAL, KCN, KCS, XC, YC, ZC, THXY, THYZ, THZX, PAR1, PAR2
其中,KCN为编号,从11开始,KCS为坐标系的类型,XC, YC, ZC值采用全局坐标系,为要定义的局部坐标系的原点位置,THXY, THYZ, THZX为局部坐标系相对全局坐标系沿着各个坐标轴旋转的角度。输
入过程中未给出值的符号用0默认。LOCAL的目的主要是为了建模方便以及选取便利。
LOCAL,11,0 !定义局部坐标系11,笛卡尔类型,原点在全局坐标(0,0,0)
LOCAL,12,1 !定义局部坐标系12,圆柱类型,原点在全局坐标(0,0,0)
LOCAL,13,2,0,1,2 !定义局部坐标系12,球坐标类型,原点在全局坐标(0,1,2)
【注意】:执行LOCAL以后,CSYS会自动激活为该坐标系(This local system becomes the active coordinate system).仅此命令有这个功能,其他的均要附加CSYS才能改变当前的激活坐标系。
▲ANSYS中激活坐标系采用CSYS命令:CSYS, KCN
ANSYS启动后CSYS默认为0(全局笛卡尔坐标),直到有LOCAL或者CSYS命令才改变。这个命令影响到点(K)坐标的输入类型。工作平面(WP)与全局坐标系重合。
CSYS,0 !激活全局笛卡尔坐标,原点在全局坐标的原点
CSYS,1 !激活全局圆柱坐标,原点在全局坐标的原点
CSYS,2 !激活全局球坐标,原点在全局坐标的原点
CSYS,4(WP) !激活工作平面,原点在工作平面的原点
CSYS,11 !激活先前定义的局部坐标11,原点在局部坐标的原点
▲ANSYS中定义工作平面的位置采用WPLANE或者WPAVE命令:
1)WPLANE, WN, XORIG, YORIG, ZORIG, XXAX, YXAX, ZXAX, XPLAN, YPLAN, ZPLAN
注:所有点的坐标均是全局坐标。
XORIG, YORIG, ZORIG为要定义的工作平面原点O的位置,坐标类型为全局坐标系,与当前激活的坐标类型(CSYS)无关。XXAX, YXAX, ZXAX为确定局部坐标系的X轴的方向,坐标类型为全局坐标系,局部坐标系的X轴就沿着原点O与此点的连线方向。XPLAN, YPLAN, ZPLAN为确定局部坐标系的Y轴方向,类型为全局坐标系,原点O与此点的连线确定Y轴的方向,不要求与OX垂直,只要成一弧度就可以确定。 wplane,,1,0,0 !将工作平面原点平行移动到全局坐标点(1,0,0),X和Y方向均与全局坐标系相同。
wplane,,1,0,0,1,1,0 !将工作平面原点平行移动到全局坐标点(1,0,0),X方向为由全局坐标(1,0,0)指向(1,1,0),Y方向为保证Z方向与全局坐标系相同的方向。
wplane,,1,0,0,0.8,0.8,0,1.2,0.2,0 !将工作平面原点平行移动到全局坐标点(1,0,0),X方向为由全局坐标(1,0,0)指向(0.8,0.8,0),Y的方向由全局坐标(1,0,0)指向(1.2,0.2,0)的方向确定。Z方向不一定与全局坐标系相同。
2)WPAVE, X1, Y1, Z1, X2, Y2, Z2, X3, Y3, Z3
将工作平面的坐标原点O移动到由上述三点所确定的平面的中心(坐标的算术平均)
注:所有坐标均是针对当前激活的坐标系类型而言。
wpave,0.5,0,0 !将工作平面的坐标原点移动到当前激活坐标系类型(假定为笛卡尔类型,CSYS,0)下的点(0.5,0,0)处
wpave,0.5,0,0,0.5,90,0 !将工作平面的坐标原点移动到当前激活坐标系类型(假定为笛卡尔类型,CSYS,1)
下的点(0.5,0,0)与点(0.5,90,0)的连线(为该坐标系下的连线,不为直线,为圆弧形)中点处。
wpave,0.5,0,0,0.5,90,0,0.7,45,0 !将工作平面的坐标原点移动到当前激活坐标系类型(假定为笛卡尔类型,CSYS,1)下的点(0.5,0,0)、点(0.5,90,0)与点(0.7,45,0)的平面的几何中心处(形心)。
问题1:
在圆柱的周围沿径向加一圈位移载荷,如何利用柱坐标加载。
解决方法:
CSYS,1 !转化当前坐标为柱坐标
NSEL,... !选取所要加载或约束节点
NROTAT,ALL !转化节点坐标与当前平行(关键指令)
然后加载即可,
注:
1、NROTAT:将节点坐标系旋转到激活坐标系的方向。即节点坐标系的X轴转成平行于激活坐标系的X轴或R轴,节点坐 标系的Y轴旋转到平行于激活坐标系的Y或θ轴。节点坐标系的Z轴转成平行于激活坐标系的Z或Φ轴。
2、我的理解:如果没有NROTAT那条指令加载失败的原因是,载荷的施加都是施加在节点坐标系的,虽然CSYS,1指定 了当前坐标系为柱坐标系,但单元坐标系仍然没有改变(平行于总体卡式坐标系),NROTAT的作用就是将单元的节点 坐标系方向指定为当前坐标系方向。
.cn/s/blog_4ccc6da00100a0au.html
工作平面(Working Plane)
工作平面是创建几何模型的参考(X,Y)平面,在前处理器中用来建模(几何和网格)
总体坐标系
在每开始进行一个新的ANSYS分析时,已经有三个坐标系预先定义了。它们位于模型的总体原点。三种类型为:
CS,0: 总体笛卡尔坐标系
CS,1: 总体柱坐标系
CS,2: 总体球坐标系
数据库中节点坐标总是以总体笛卡尔坐标系,无论节点是在什么坐标系中创建的。
局部坐标系
局部坐标系是用户定义的坐标系。局部坐标系可以通过菜单路径Workplane>Local CS>Create LC来创建。 激活的坐标系是分析中特定时间的参考系。缺省为总体笛卡尔坐标系。当创建了一个新的坐标系时,新坐标系变为激活坐标系。这表明后面的激活坐标系的命令。菜单中激活坐标系的路径 Workplane>Change
active CS to>。
节点坐标系
每一个节点都有一个附着的坐标系。节点坐标系缺省总是笛卡尔坐标系并与总体笛卡尔坐标系平行。节点力和节点边界条件(约束)指的是节点坐标系的方向。时间历程后处理器 /POST26 中的结果数据是在节点坐标系下表达的。而通用后处理器/POST1中的结果是按结果坐标系进行表达的。
例如: 模型中任意位置的一个圆,要施加径向约束。首先需要在圆的中心创建一个柱坐标系并分配一个坐标系号码(例如CS,11)。这个局部坐标系现在成为激活的坐标系。然后选择圆上的所有节点。通过使
用 "rep7>Move/Modify>Rotate Nodal CS to active CS", 选择节点的节点坐标系的朝向将沿着激活坐标系的方向。未选择节点保持不变。节点坐标系的显示通过菜单路径Pltctrls>Symbols>Nodal CS。这些节点坐标系的X方向现在沿径向。约束这些选择节点的X方向,就是施加的径向约束。
注意:节点坐标系总是笛卡尔坐标系。可以将节点坐标系旋转到一个局部柱坐标下。这种情况下,节点坐标系的X方向指向径向,Y方向是周向(theta)。可是当施加theta方向非零位移时,ANSYS总是定义它为一个笛卡尔Y位移而不是一个转动(Y位移不是theta位移)。
单元坐标系
单元坐标系确定材料属性的方向(例如,复合材料的铺层方向)。对后处理也是很有用的,诸如提取梁和壳单元的膜力。单元坐标系的朝向在单元类型的描述中可以找到。
结果坐标系
/Post1通用后处理器中 (位移, 应力,支座反力)在结果坐标系中报告,缺省平行于总体笛卡尔坐标系。这意味着缺省情况位移,应力和支座反力按照总体笛卡尔在坐标系表达。无论节点和单元坐标系如何设定。要恢复径向和环向应力,结果坐标系必须旋转到适当的坐标系下。这可以通过菜单路径Post1>Options for output实现。 /POST26时间历程后处理器中的结果总是以节点坐标系表达。
显示坐标系
显示坐标系对列表圆柱和球节点坐标非常有用(例如, 径向,周向坐标)。建议不要激活这个坐标系进行显示。屏幕上的坐标系是笛卡尔坐标系。显示坐标系为柱坐标系,圆弧将显示为直线。这可能引起混乱。因此在以非笛卡尔坐标系列表节点坐标之后将显示坐标系恢复到总体笛卡尔坐标系
.cn/s/blog_622430b30100fhct.html
第二篇:ansys-workbench-接触的总结
① 下面对非对称行为接触表面的正确选择给出选择指导:
– 如果一凸的表面要和一平面或凹面接触,应该选取平面或凹面为目标面. – 如果一个表面有粗糙的网格而另一个表面网格细密,则应选择粗糙网格表面 为目标面.
– 如果一个表面比另一个表面硬,则硬表面应为目标面.
– 如果一个表面为高阶而另一个为低阶,则低阶表面应为目标面.
– 如果一个表面大于另一个表面,则大的表面应为目标面.
② 法向刚度WB-Mechanical系统默认自动设定。
– 用户可以输入 “法向刚度因子Normal Stiffness Factor” (FKN) 它是计算刚度代码的乘子.因子越小,接触刚度就越小。
? 默认 FKN =10 (对于绑定和不分离的接触)
? 默认 FKN=10(其他形式接触) 默认 FKN1.0 (其他形式接触)
? 接触问题法向刚度选择一般准则:
– 体积为主的问题: 用“Program Controlled” 或手动输入 “Normal Stiffness Factor” 为“1”
– 弯曲为主的问题: 手动输入 “Normal Stiffness Factor” 为“0.01” 到“0.1”之
间的数值。
-在大变形问题的无摩擦或摩擦接触中建议使用“Augmented Lagrange”
法向接触刚度 knormal是影响精度和收敛行为最重要的参数.
– 刚度越大,结果越精确,收敛变得越困难.
– 如果接触刚度太大,模型会振动,接触面会相互弹开。
- 其中update stifness 设置 可以控制计算收敛与否。
1
③
0.0032902 0.0033033 0.0033052 0.0033055 0.0033053
565.05Mpa 774.12Mpa 811.34Mpa 816.26Mpa 812.78Mpa
0.011864 0.0016253 0.0017035 0.000017138 0.000019984
17 17 20 24 57
-刚度增加, 渗透减少,而最大压力增加. 并且通常会有更多的迭代和更长运行时间
④ 不管使用了何种接触行为 (对称或反对称), 模型的变形和等效应力本质
是相同的. 对称行为可以提高收敛. 但对称接触结果不容易解释,为接触面与目标面结果的平均值。
2
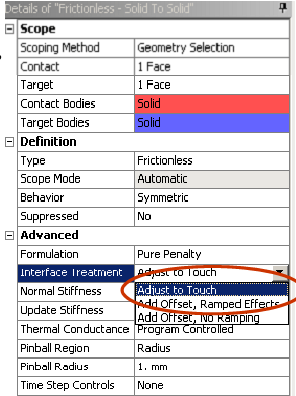
⑤ 在详细窗口中用户可以选择“Adjusted to Touch” 或“AddOffset” -“AdjstedtoToch” 让Simlation 决定需要多大的接触偏移量来闭合缝隙建立初始接触。注意,Pinball 区域大小会影响这种自动方法,因此必须保证Pinball 半径大於最小的缝隙距离.
-“AddOffset” 让用户来指定允许接触面偏移的正负距离.正值是指关闭缝隙而负值是指打开缝隙.该选项用于把模型调整到合适位置而不需要修改几何值.让几何在刚好接触的位置上,改变正距离到穿透值
。
“Add Offset, Ramped Effects” – 在一个载荷步内分几个
子步逐步施加干涉。
– 该选项对富于挑战的干涉问题的收敛是有帮助的。
“Add Offset, No Ramping” – 在第一个子步内一次完成载
荷的施加。
3
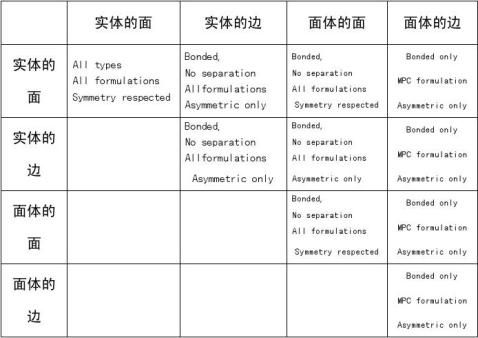
⑥ 接触类型及其可供的选项总结如下表所示:
4
-
ansys学习心得
Ansys学习心得学习ANSYS经验总结一学习ANSYS需要认识到的几点相对于其他应用型软件而言ANSYS作为大型权威性的有限元分…
-
ansys学习总结
1旋转坐标系帮助里的命令格式是这样的WPROTATHXYTHYZTHZX首先旋转的参考的坐标系以当前工作平面的XY为XY轴然后通过…
-
ansys学习总结
100547冉伟康机Z10学习ANSYS经验总结Ansys软件的应用主要分为实体建模前处理求解以及后处理几个阶段实体建模有两种方法…
-
Ansys学习总结
5ANSYS输出mnf文件模型单位要统一最好都适用国际单位米制的那么弹性模量密度也要统一单位然后进行单元添加solid45beam…
-
ansys学习小结
A几何建模方法建模方法有限元模型的建立方法可分为直接法直接根据机械结构的几何外型建立节点和单元因此直接法只适应于简单的机械结构系统…
-
ansys总结命令流
kgtKeypoints关键点lgtLines线agtArea面vgtVolumes体egtElements单元ngtNodes节…
-
ansys学习心得
Ansys学习心得学习ANSYS经验总结一学习ANSYS需要认识到的几点相对于其他应用型软件而言ANSYS作为大型权威性的有限元分…
-
ansys学习总结
1旋转坐标系帮助里的命令格式是这样的WPROTATHXYTHYZTHZX首先旋转的参考的坐标系以当前工作平面的XY为XY轴然后通过…
-
ansys学习总结
100547冉伟康机Z10学习ANSYS经验总结Ansys软件的应用主要分为实体建模前处理求解以及后处理几个阶段实体建模有两种方法…
-
Ansys学习总结
5ANSYS输出mnf文件模型单位要统一最好都适用国际单位米制的那么弹性模量密度也要统一单位然后进行单元添加solid45beam…