��Ƭ��ʵѵ����
��Ƭ��ʵѵ����
�γ�������ƣ���Ƭ��ʵѵ�ܽ�
ѧԺ�� ���ӵ���ѧԺ
רҵ�� ������Ϣ
������ XXX
ָ����ʦ�� XXX
20##��12��29��
һ��ʵѵĿ�ģ�
1����Ϥ��Ƭ��Ӧ��ϵͳ�Ŀ��������ƹ��̡�
2��������MCS-51��Ƭ�����мĵ�Ƭ��Ӧ��ϵͳ��Ӳ����ơ�
3���ܲ���MCS-51��Ƭ��������Խ��мĵ�Ƭ��Ӧ��ϵͳ��������ơ�
4�����յ�Ƭ��Ӧ��ϵͳ��Ӳ�����������Է�����
5����Ϥ��Ƭ�����濪��ϵͳ�����ã������������õ�Ƭ�����濪��ϵͳ�������߷��桢�� �Ժ�Ŀ�����̻��ķ�����
6��Ϊ�����µ�Ƭ��Ӧ��ϵͳ�Ŀ�����������ά�������춨����
����ʵѵ���ģ�
pc����һ̨�� ��Ƭ��С����һ����
����ʵѵ�ص��ѵ�
1��������PROTEL���������ߣ�ѧϰ�Ե�Ƭ��Ӧ��ϵͳ��Ӳ�����
2������KIEL C51 ��ơ����Ե�Ƭ��Ӧ�ù̼�
3������DACоƬ��LCD12864��LCD1602������ʽ���̡�����ܡ����ڡ��������Ȼ���֪ʶ
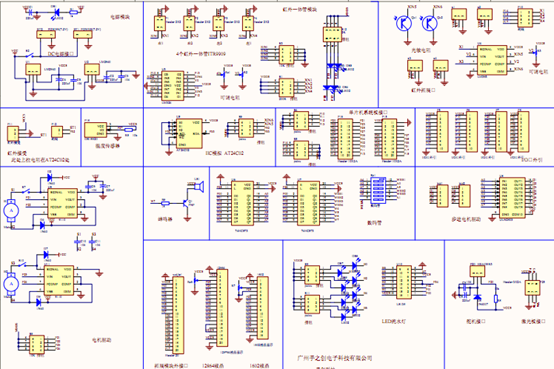
�ġ�ʵѵС��ԭ��ͼ
�塢ʵѵ����
1��1602������ʾ
#include <reg51.h>
#define lcd_data_port P0
sbit lcd_rs = P2^5;
sbit lcd_en = P2^6;
//��ʱ����//
void delay100us(unsigned int x)
{unsigned int a,b;
for(a=0;a<x;a++)
for(b=0;b<10;b++);
}
//������//
void sendcommandtolcd(unsigned char lcd_command)
{
lcd_data_port=lcd_command;
lcd_rs=0;
lcd_en=0;
delay100us(10);
lcd_en=1;
delay100us(10);
lcd_en=0;
delay100us(10);
}
//������//
void senddatatolcd(unsigned char lcd_data)
{
lcd_data_port=lcd_data;
lcd_rs=1;
lcd_en=0;
delay100us(10);
lcd_en=1;
delay100us(10);
lcd_en=0;
delay100us(10);
}
void lcd_init(void)
{ sendcommandtolcd(0x38);
sendcommandtolcd(0x0c);
sendcommandtolcd(0x01);
sendcommandtolcd(0x06);
}
void display(unsigned char *p)//��ʾ����
{
while(*p!='\0')
{senddatatolcd(*p);
p++;}
}
void main(void)
{ lcd_init();
sendcommandtolcd(0x80);//��һ�е�ַ
//senddatatolcd(0x41);��ʾ��ĸA
display("diyihang");
sendcommandtolcd(0xc0);//�ڶ��е�ַ
display("dierhang");
while(1);
}
12864������ʾ
#include <reg51.h>
#define lcd_port P0
sbit lcd_rs = P2^5;
sbit lcd_rw = P2^6;
sbit lcd_en = P2^7;
//��ʱ����//
void delay100us(unsigned int x)
{unsigned int a,b;
for(a=0;a<x;a++)
for(b=0;b<10;b++);
}
//������//
void sendcommandtolcd(unsigned char lcd_command)
{
lcd_port=lcd_command;
lcd_rw=0;
lcd_rs=0;
lcd_en=1;
delay100us(100);
lcd_en=0;
delay100us(100);
}
//������//
void senddatatolcd(unsigned char lcd_data)
{
lcd_port=lcd_data;
lcd_rw=0;
lcd_rs=1;
lcd_en=1;
delay100us(100);
lcd_en=0;
delay100us(100);
}
void lcd_init(void)//��ʼ��
{ sendcommandtolcd(0x38);
sendcommandtolcd(0x0c);
sendcommandtolcd(0x06);
sendcommandtolcd(0x01);
}
void display(unsigned char *p)//��ʾ����
{
while(*p!='\0')
{senddatatolcd(*p);
p++;}
}
void main(void)
{
lcd_init();
sendcommandtolcd(0x80);//��һ�е�ַ
display("��һ��A");
sendcommandtolcd(0x90);//�ڶ��е�ַ
display("�ڶ���B");
sendcommandtolcd(0x88);//�����е�ַ
display("������C");
//senddatatolcd(0x41);
sendcommandtolcd(0x98);//�����е�ַ
//senddatatolcd(0xc4);
//senddatatolcd(0xe3);
display("������D");
while(1);
}
A/Dת����������
#include <reg51.h>
#define uint unsigned int
#define uchar unsigned char
sbit CS=P0^1;
sbit CLK=P0^0;
sbit DATA=P0^2;
void da5615(uint da)
{uchar i;
da<<=6;
CS=0;
CLK=0;
for(i=0;i<12;i++)
{DATA=(bit)(da&0x08000);
CLK=1;
da<<=1;
CLK=0;}
CS=1;
CLK=0;
for(i=0;i<12;i++);}
void delay(uint x)
{uint i,j;
for(i=0;i<x;i++)
for(j=0;j<100;j++);}
void main()
{int i;
while(1)
{for(i=1;i<0x03fc;i++)
{da5615(i);
delay(1);}
}}
���ڿ���
#include <reg51.h>
unsigned char a=0x55;
void main()
{
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
TR1=1;
SCON=0x50;
while(1)
{
while(!RI);
RI=0;
P0=SBUF;
SBUF=a;
while(!TI);
TI=0;
}}
������
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit LCDE=P2^6;
sbit RDN=P2^5;
sbit WRN=P2^4;
uint a=0,b=0,c=2,second=0,minute=8,hour=11,day=15,moon=12,year=2012;
uint a1,a2,a3,sec1,sec2,min1,min2,ho1,ho2,day1,day2,moon1,moon2,year1,year2,year3,year4;
void display();
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_com(uchar com)
{
RDN=0;
P0=com;
delay(5);
LCDE=1;
delay(5);
LCDE=0;
}
void write_data(uchar date)
{
RDN=1;
P0=date;
delay(5);
LCDE=1;
delay(5);
LCDE=0;
}
void init()
{
WRN=0;
LCDE=0;
write_com(0x38);
write_com(0x0c);
write_com(0x01);
write_com(0x06);
}
void main()
{
init();
IE=0x82;
TMOD=0x01;
TH0=(65636-10000)/256;
TL0=(65636-10000)%256;
TR0=1;
while(1)
{
display();
}
}
void all(void)interrupt 1
{
TH0=(65636-10000)/256;
TL0=(65636-10000)%256;
a++;
if(a>100)
{
a=0;
second++;
if(second%2==0)
{ b=2;
c=0;}
if(second%2==1)
{ b=0;
c=2;}
if(second==60)
{
second=0;
minute++;
if(minute==60)
{
minute=0;
hour++;
if(hour==24)
{
hour=0;
day++;
if(day>30)
{
day=0;
moon++;
if(moon>12)
{
moon=0;
year++;
}
}
}
}
}
}
}
void display()
{
a1=a%10;
a2=a/10%10;
a3=a/100;
sec1=second%10;
sec2=second/10;
min1=minute%10;
min2=minute/10;
ho1=hour%10;
ho2=hour/10;
day1=day%10;
day2=day/10;
moon1=moon%10;
moon2=moon/10;
year1=year%10;
year2=year%100/10;
year3=year/100%10;
year4=year/1000;
write_com(0x80+0x4c);
write_data(0x30+a1);
write_com(0x80+0x4b);
write_data(0x30+a2);
write_com(0x80+0x4a);
write_data(0x3a);
write_com(0x80+0x49);
write_data(0x30+sec1);
write_com(0x80+0x48);
write_data(0x30+sec2);
write_com(0x80+0x47);
write_data(0x3a);
write_com(0x80+0x46);
write_data(0x30+min1);
write_com(0x80+0x45);
write_data(0x30+min2);
write_com(0x80+0x44);
write_data(0x3a);
write_com(0x80+0x43);
write_data(0x30+ho1);
write_com(0x80+0x42);
write_data(0x30+ho2);
write_com(0x80+0x0c);
write_data(0x30+day1);
write_com(0x80+0x0b);
write_data(0x30+day2);
write_com(0x80+0x0a);
write_data(0x2f);
write_com(0x80+0x09);
write_data(0x30+moon1);
write_com(0x80+0x08);
write_data(0x30+moon2);
write_com(0x80+0x07);
write_data(0x2f);
write_com(0x80+0x06);
write_data(0x30+year1);
write_com(0x80+0x05);
write_data(0x30+year2);
write_com(0x80+0x04);
write_data(0x30+year3);
write_com(0x80+0x03);
write_data(0x30+year4);
write_com(0x80);
write_data(0x3c+b);
write_com(0x80+0x01);
write_data(0x3c+b);
write_com(0x80+0x02);
write_data(0x3c+b);
write_com(0x80+0x0d);
write_data(0x3c+c);
write_com(0x80+0x0e);
write_data(0x3c+c);
write_com(0x80+0x0f);
write_data(0x3c+c);
write_com(0x80+0x40);
write_data(0x3c+b);
write_com(0x80+0x41);
write_data(0x3c+b);
write_com(0x80+0x4d);
write_data(0x3c+c);
write_com(0x80+0x4e);
write_data(0x3c+c);
write_com(0x80+0x4f);
write_data(0x3c+c);
}
0~99
#include <reg51.h>
#define SEG P0 // �����߽���ʾ������Port 0
#define uchar unsigned char
#define uint unsigned int
sbit p25=P2^5;
sbit p26=P2^6;
Char code TAB[10]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7c,0x07,0x7f,0x67}; /* �����߽���ʾ�������ź�����(����) */
/* �ӳٺ���,�ӳ�Լx 5ms */
void delay(int x) // �ӳٺ�����ʼ
{ int i,j; // ������������i,j
for (i=0;i<x;i++) // ����x��,�ӳ�x 5ms
for (j=0;j<600;j++);// ����600�Σ��ӳ�5ms
} // �ӳٺ�������
void main()
{
unsigned int ge=0,shi=0,coun=0;
while(1)
{
p26=1;
P0=0xfd;
p26=0;
p25=1;
SEG=TAB[ge];
delay(2);
p25=0;
p26=1;
P0=0xfe;
p26=0;
p25=1;
SEG=TAB[shi];
delay(2);
coun++ ;
if(coun>=20)
{ coun=0;
++ge;}
if(ge>9)
{ ge=0;
++shi;
if(shi>9) shi=0;
}} }
��ˮ��
#include <reg51.h>
void delay(int);
main() // ������ʼ
{ unsigned char i; // ����������Ԫ����i(ռ1Bytes)
P3=0x00;
while(1)
{for(i=0;i<=7;i++)
{P0=i;
delay(100);}
}} // ���������
/* �ӳٺ���,�ӳ�Լx 5ms */
void delay(int x) // �ӳٺ�����ʼ
{ int i,j; // ������������i,j
for (i=0;i<x;i++) // ����x��,�ӳ�x 5ms
for (j=0;j<1200;j++);// ����600�Σ��ӳ�5ms
} // �ӳٺ�������
�����ĵ����
ͨ���⼸��ĵ�Ƭ����ʵѵ���������۵Ļ����ϸ���̵������˵�Ƭ����������ݼ�ʵ�������е�Ӧ�ê�ʵѵ�������Լ�����������˼ά��������������������ı�����������������dz��ͬʱҲ��¶��һЩƽʱѧϰ�ϵ����⪣������̷�˼����Щ����ķ��ֽ�Ϊ���Ժ��ѧϰ����������·����©��ȱΪ��һ��ѧϰ��������ͨ��ʵѵ�����Ҷ�������α�дһЩ�ij���ѧ�������������Ƭ��Ӧ�ó����ҿ����ڽ����ճ�������������á�
-
��Ƭ��ʵѵ����
��Ƭ��ʵѵ��������ѧ�Ű༶ָ����ʦʵѵʱ��ǰ��һ�ܵĵ�Ƭ��ʵѵ�ܿ�ͽ���������һ�ܵ�ʱ������ѧ���˺ܶ���ڵ�Ƭ���������֪ʶ��ʦ�ڡ�
-
��Ƭ��ʵ�鱨��
��Ƭ��ʵ�鱨��ѧ������ѧ��רҵָ����ʦѧԺ��Ϣ���������ѧԺ20xx��11�µ�Ƭ��ʵ�鱨��ʵ��һMCS51ָ��ϵͳʵ����������1ʵ��
- ��Ƭ��ʵѵ����
-
��Ƭ��ʵѵ�����ĵ�
�㶫�Ṥְҵ����ѧԺʵѵ����ʵѵ��Ŀ��Ƭ��ʵѵϵ�𣺵���ͨ�Ź���ϵרҵ��Ӧ�õ��Ӽ����༶��Ƕ��ʽ091��������**ѧ�ţ�***ָ����
-
��Ƭ��ʵ�鱨��
��Ŀ��Ƭ�����ԭ��ʵ�鱨��ѧԺ�������ѧ�빤��ѧԺרҵ��Ϣ��ȫ����ѧ��20xx��12��8��ʵ��һ��������ӿڱ��һʵ��Ŀ��1����K��
-
��Ƭ��ʵѵ���ĵ����
��Ƭ��ʵѵ����һ�ܵ�ʵѵ�������Ǵ���һ���Ƕ�ȥ���ֵ�Ƭ�����ڼ���ѧ���˺ܶ౦���֪ʶ�;��飬����ε�Ƭ��ʵѵ�����ǹ���������ƽʱ����
-
��Ƭ��ʵ���ĵ����
ʱ�������죬������䣬һ��ѧ�ھ͵���β�������뵽�����ݱ����ĩ���ԽΡ���ѧϰ��Ƭ�����ſγ�֮ǰ����������������ο���ʦ��ѧ��ѧ��
-
��Ƭ��ʵ���ĵ����
��Ƭ��ʵ���ĵ����ʱ�������죬������䣬һ��ѧ�ھ͵���β�������뵽�����ݱ����ĩ���ԽΡ���ѧϰ��Ƭ�����ſγ�֮ǰ���������������
- ��Ƭ��ʵϰ�ĵ����
- ��Ƭ��ʵϰ�ĵ����1
-
��Ƭ��ʵϰ�����ܽ�
���ʵϰ����ʹ�ÿ��Ƶ�·�ĵ�Ƭ����at89s51�ͺŵġ�ͨ����ʵ�ֶ�յ˫ɫ�Ʒ�������ܵĿ���p0��p2�ڿ�����յ�ơ���at89s��