gps实习报告
学生实习报告
一.实习目的
1、实习的目的和意义
(1)通过实习,加深对书本知识的进一步理解、掌握与综合应用,加深对测量技术理论的理解,做到理论与实践相统一,提高分析问题、解决问题的能力,从而使测量技术得到锻炼,测量知识进一步巩固和深化。
(2)通过实习,熟悉并掌握大地测量和工程测量的作业程序及施测方法。
(3)通过完成测量实际任务的锻炼,提高独立从事测绘工作的计划、组织与管理能力,培养良好的职业品质。
(4)通过这次实习培养我们团结工作能力、综合分析问题和解决问题的能力、组织管理能力
2、实习要求
一方面是要在学生完成全部学业之前总结和检验以往的知识积累情况,进一步巩固和运用已学知识,培养学生的工程技术观念,掌握测量工程数据处理方法,并继续拓宽学生的知识面。另一方面在于培养学生的综合能力,包括:自学能力、收集资料和获取信息的能力、工作的组织和管理能力、动手能力、独立分析问题和解决问题的能力,以及社交活动能力等,为今后工作岗位打下坚实的基础。
二.实习内容
1、GPS静态测量实习
1.1 实习目的
GPS测量与数据处理实习是“GPS原理及其应用”课程教学中一项重要的实践环节。通过实习,我们可以掌握GPS接收机的操作方法,掌握利用GPS技术进行控制测量、地形测量和放样等测绘工作方法。加深对课堂所学理论知识的理解,产生对GPS测量技术的感性认识,并培养和提高利用所学理论知识动手解决实际问题的能力。
1.2 实习内容
实习包括GPS静态测量的外业观测和内业数据处理分析,GPS RTK地形测量等内容。采用GPS静态测量技术,在安徽理工大学大学校本部布设一个控制网。具体实习内容包括:技术设计、选点、外业观测计划、外业观测、数据传输及格式转换、基线解算、网平差、成果质量控制、技术总结。
利用中海达GPS接收机随机软件,对所采集的样本数据进行基线解算和网平差。利用GPS RTK测量技术进行碎部点测量,并用随机软件对采集的数据进行处理。进行地形图的绘制。
1.3 GPS控制网外业观测要求
Ø 仪器:中海达接收机
Ø 等级:国家C级;
Ø 控制网覆盖范围:安徽理工大学校本部;
Ø 点数:不少于7个;
Ø 平均点间距:>100m;
Ø 实际观测总时段数:2个时段
Ø 平均设站次数:2次
1.4数据处理
1) 基线处理和质量控制
Ø 基线处理软件:南方测绘GPS数据处理软件
Ø 基线解算方法:新建工程→增加观测数据→解算基线→检查闭合环和重复基线→网平差及高程拟合→平差成果输出或者打印
Ø 同步环闭合差:见附录二
Ø 异步环闭合差:见附录二
Ø 重复基线较差:见附录二
2) 网平差处理及质量控制
Ø 网平差软件:南方测绘GPS数据处理软件
Ø 坐标参照系:WGS-1984坐标系
Ø 网平差过程:见附录二
Ø 三维无约束平差结果:见附录二
Ø 基线向量改正数统计:见附录二
Ø 相邻点距离中误差统计:见附录二
2、RTK地形图测量实习
1.1 原理与目的
RTK的工作原理是将一台接收机置于基准站上,另一台或几台接收机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。然后将这个改正值通过无线电数据链电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
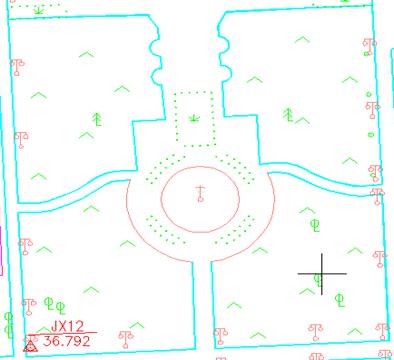
本次RTK动态测量的测区是安徽理工大学喷泉广场,测区范围不大,主要地物为花坛、台阶、树木、路灯等,总体地势比较平坦,主要利用碎步测量获取地形边缘点的坐标和高程,最后跟据点号和草图绘制成图。但是在测量的过程中,由于周围有高大乔木及居民楼等高大地物的影响,边缘接收卫星信号情况受到影响,信号接收效果较差,降低了定位精度。
1.2 实习内容
(1)架设基准站
将基准站GPS接收机安置在开阔的地方,架设电台和天线。启动基准站,并建立一个新的工程。
(2)启动基准站
显示连接接收机后,输入基准站所在控制点的名称、天线高度。
(3)启动流动站
首先测量两个已知点,得到观测值后进行解算,直至误差在限差内才可开始碎步测量。碎步测量时,轮流进行碎步测量
(4)数据处理
利用CASS软件绘制碎步点图,提交成果。见附录
3、控制测量实习
3.1实习目的
控制测量的实训,主要是学习全站仪以及水准仪的基本的操作和使用方法,比如是角度、水平距离的测量、坐标的测量、高程测量等。
控制测量学习的主要目是培养学生理论联系实际的能力、动手能力、实事求是的科学态度、刻苦耐劳的工作作风和互相协作的团队精神;熟悉掌握全站仪的使用方法;培养一丝不苟的测绘技术工作态度、培养吃苦耐劳、团结友爱、集体协助的精神。
3.2导线测量技术要求
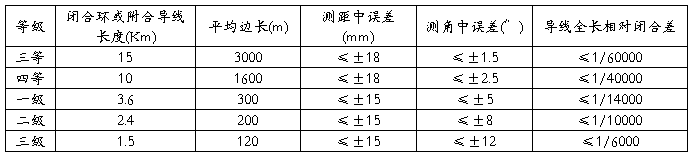
光电测距导线的主要技术要求
导线测量水平角观测技术要求
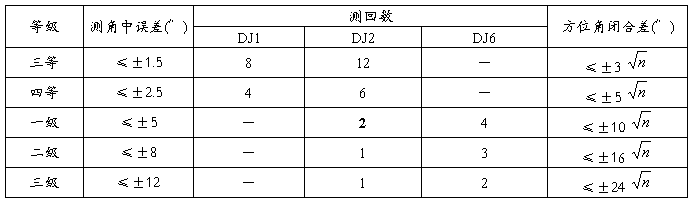
注:n为测站数
水平角方向观测法的各项限差(″)

注:当观测方向的垂直角大于±3º时,该方向2倍照准差的变动范围,可按相邻测回同方向进行比较,
手簿中注明。
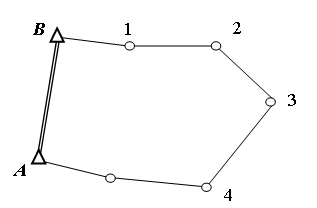
3.3测量平差程序设计
网形平面图:

1. 在程序中中输入数据
2.打开数据文件
3平差计算
4平面成果输出见附录三
三.实习总结
本次实习,是我们进入大学以来最为全面的实习,也是较为深入的实习,通过这两周时间的实习,使我们很多测绘的基本能力得到了锻炼。首先,是熟悉了仪器的用途,熟练了仪器的各种使用方法,工作原理。清晰了误差的来源学会了一些基本的减少误差的措施,加强了对测量过程中一般原则,如:“从整体到局部”、“先控制后碎部”、“由高级到低级”的了解,认识到他们在测量工作中的巨大作用.
在这次实习中,我深刻体会了现代的测绘在空间卫星技术下的发展和GPS在各方面的领域的广泛运用。也深刻的理解了现代社会对内业处理工作者的高知识水平的要求。
通过这次GPS实习,我不仅对GPS原理有了更深的了解,还对GPS 外业采集和内业处理有了一定的理解。同时,我也深刻的感受到了团队合作的重要性。小组成员团结一致,不仅能创造良好的工作氛围,而且能有效的解决工作中遇到的各种困难,提高工作效率。我们从实习中总结了经验和教训。天本次实习不仅是对我们动手能力的提升,更是对理论知识的一次综合性巩固。让我意识到理论与实际相结合,才能促进我们工作的良好完成。
虽然本次实习的周期较短,强度也不大,但是我觉得本次的收获是以往历次实习所不能比拟的,这多亏了指导老师认真细致合理有效的安排,以及各位队友积极地态度,团结的精神,和不怕艰苦的生活品质。在此真心的对他们的支持与帮助表示感谢。
在余下的时间里,我要安心把所学的理论知识进行梳理和回顾,努力学习更多的新知识新技术,为以后实际的工作打下坚实的基础。
附录
附录一:
测区平面地形图
附录二:
项目总结报告
目录
1.项目属性
1.1.坐标系统
1.2.起算数据
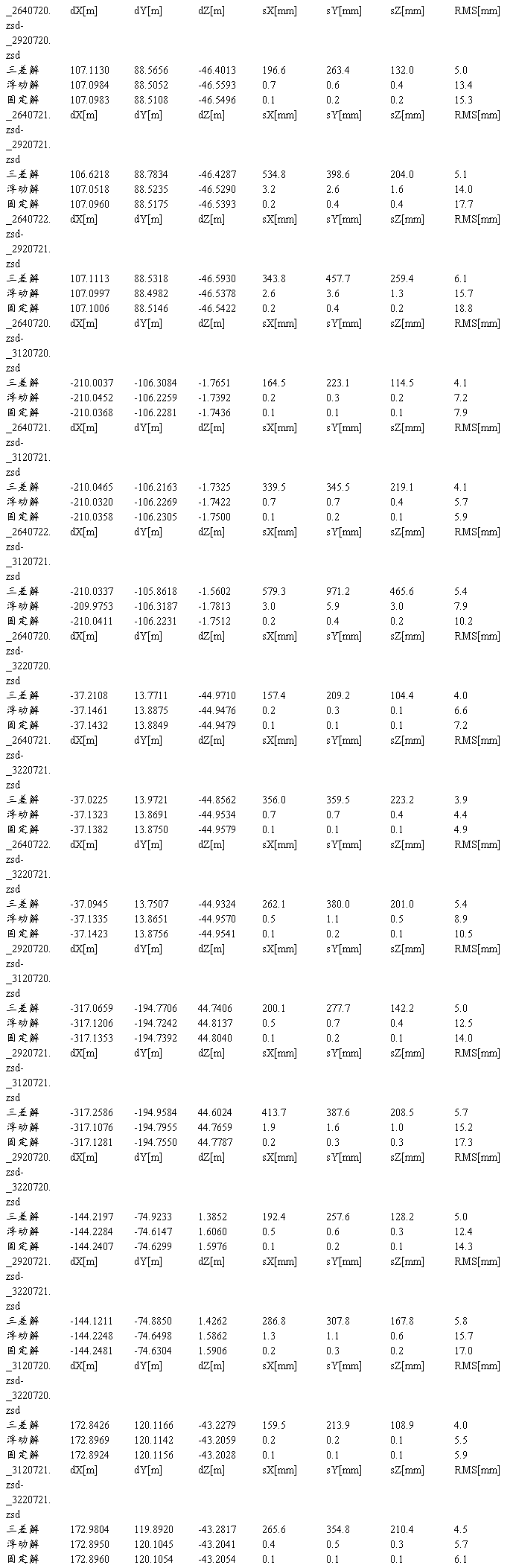
2.基线解算
2.1.基线成果
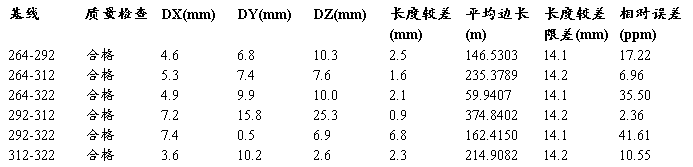
2.2.重复基线检查
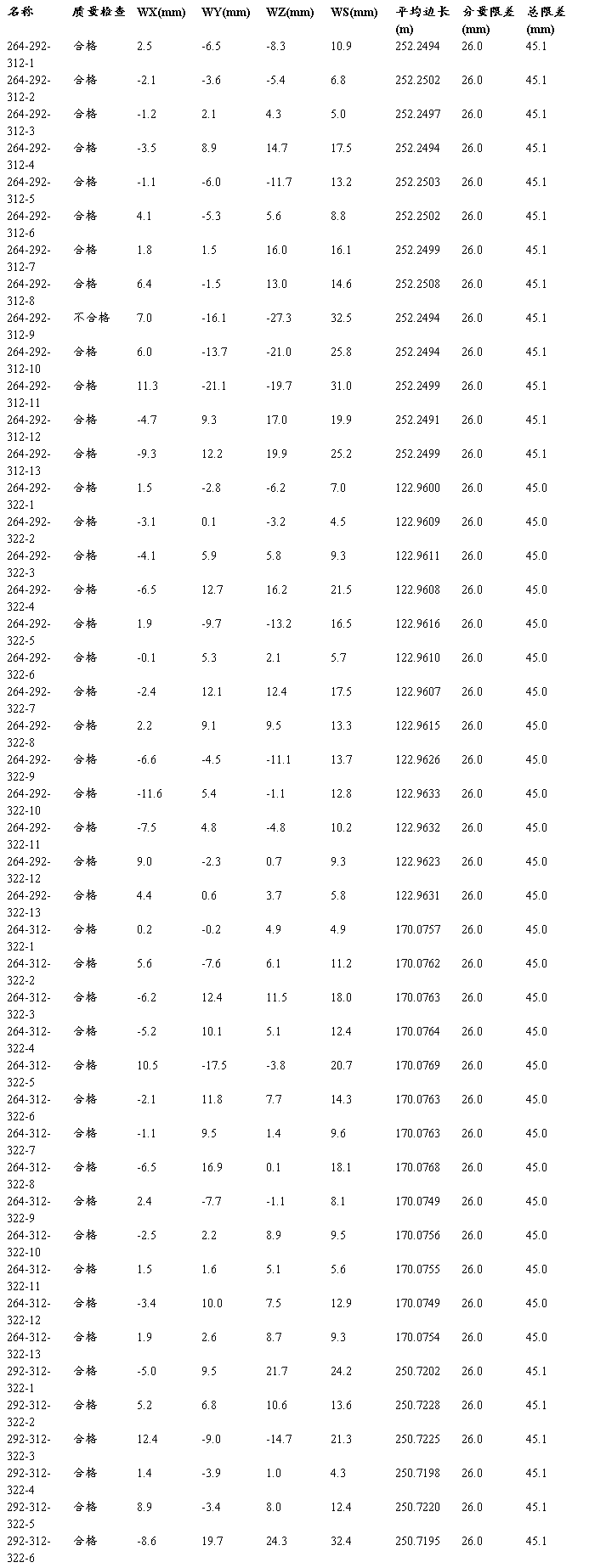
2.3.同步环检查
2.4.异步环检查
3.平差结果
3.1.WGS84自由网平差结果
3.2.WGS84约束平差结果
3.3.目标坐标系三维约束平差结果
3.4.二维约束平差结果
1.项目属性
项目名称: 实习20##-03-15
项目单位:
责任人:
开始日期:
结束日期:
描述:
1.1.坐标系统
坐标系名称: default1
椭球: 国家2000
椭球长半轴: 6378137
椭球扁率倒数: 298.257222101
投影方法: Guass 3
中央经线: 114:00:00.00000E
中央纬度: 000:00:00.00000N
原始纬度: 000:00:00.00000N
比例系数: 1
投影面高程(m): 0
第一纬度: 000:00:00.00000N
第二纬度: 000:00:00.00000N
北向加常数(m): 0
东向加常数(m): 500000
1.2.起算数据
观测文件总数: 9
站点个数: 4
形成基线总条数: 15
形成重复条数: 6
形成同步环个数: 4
形成异步环个数: 4
2.基线解算
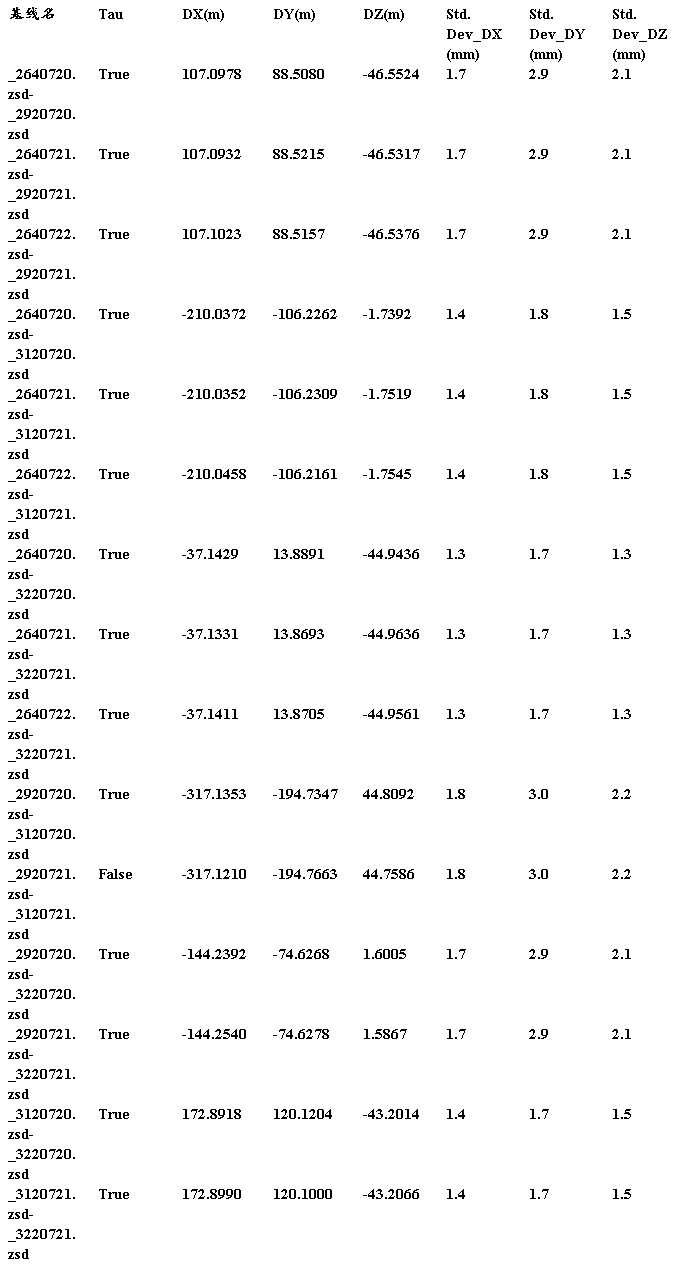
2.1.基线成果
2.2.重复基线检查
2.3.同步环检查

2.4.异步环检查
3.平差结果
3.1.WGS84自由网平差结果
基线条数: 15
平差点数: 4
基线标准差置信度(松弛因子): 10.00σ
Tau检验显著水平: 1.00%
单位权中误差比: 8.5701
x2检验值: 308.5232
x2理论范围: 17.8867 - 61.5812
x2检验结果: False
3.1.1.平差后的基线及标准差
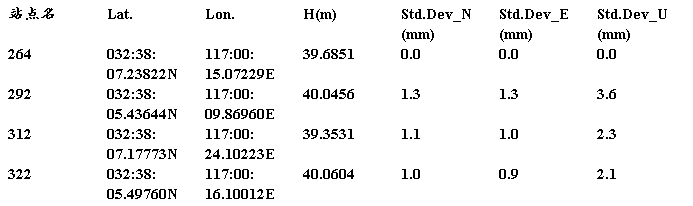
3.1.2.自由网平差坐标
平差后最弱边和最弱点
基线名 Std.Dev_DX(mm) Std.Dev_DY(mm) Std.Dev_DZ(mm) Std.Dev(mm) 相对误差
_2920720.zsd-_3120720.zsd 1.81 2.97 2.18 4.10 91334
站点名 Std.Dev_N(mm) Std.Dev_E(mm) Std.Dev_U(mm) Std.Dev(mm)
292 1.32 1.31 3.55 4.01
附录三:导线网平差结果
总点数: 7
方向组总数: 7
方向值总数: 14
边长总数: 6
已知点坐标:
A 55972.239 194812.740
B 56215.515 194845.118
方向观测值:
A 2
B 0.000
6 1150235.750
B 2
4 0.000
A 782018.450
C 2
1 0.000
3 2400751.100
1 2
4 0.000
C 2373633.060
3 2
C 504956.990
6 2861630.400
4 2
1 0.000
B 1880708.830
6 2
A 0.000
3 1514053.430
边长观测值:
1 4 155.3465
1 C 153.6099
3 6 161.6528
3 C 142.6532
4 B 128.4620
6 A 131.9169
最小二乘平差:μ=±0.218
==== 坐标平差值及其精度 ====
No. P X Y mx my M
1 A 55972.239 194812.740 0.000 0.000 0.000
2 B 56215.515 194845.118 0.000 0.000 0.000
3 6 55901.119 194923.843 0.001 0.001 0.001
4 4 56173.178 194966.403 0.000 0.001 0.001
5 C 56000.059 195174.550 0.001 0.001 0.001
6 1 56143.209 195118.832 0.001 0.001 0.001
7 3 55888.983 195085.040 0.001 0.001 0.001
==== 方向观测值平差成果 ====
P1 P2 L V T mT S ms
A B 0.00 -0.05 73451.39 0.00 245.421 0.000
6 1150235.75 0.05 1223727.25 0.28 131.916 0.001
B 4 0.00 -0.06 1091432.82 0.28 128.462 0.001
A 782018.45 0.06 1873451.39 0.00 245.421 0.000
C 1 0.00 0.11 3384356.70 0.39 153.611 0.001
3 2400751.10 -0.11 2185147.59 0.40 142.654 0.001
1 4 0.00 0.10 2810723.84 0.36 155.347 0.001
C 2373633.06 -0.10 1584356.70 0.39 153.611 0.001
3 C 504956.99 0.09 385147.59 0.40 142.654 0.001
6 2861630.40 -0.09 2741820.81 0.36 161.653 0.001
4 1 0.00 -0.08 1010723.84 0.36 155.347 0.001
B 1880708.83 0.08 2891432.82 0.28 128.462 0.001
6 A 0.00 -0.07 3023727.25 0.28 131.916 0.001
3 1514053.43 0.07 941820.81 0.36 161.653 0.001
==== 边长观测值平差成果 ====
P1 P2 S Vs T mT S+Vs ms
1 4 155.3465 0.0002 2810723.836 0.358 155.347 0.001
1 C 153.6099 0.0008 1584356.697 0.395 153.611 0.001
3 6 161.6528 -0.0001 2741820.812 0.362 161.653 0.001
3 C 142.6532 0.0006 385147.585 0.397 142.654 0.001
4 B 128.4620 0.0003 2891432.820 0.279 128.462 0.001
6 A 131.9169 -0.0005 3023727.245 0.281 131.916 0.001
==== 点位误差椭圆 ====
点名 椭圆长半轴 椭圆短半轴 长轴方位角
6 0.001 0.000 1214843.64
4 0.001 0.000 1094044.12
C 0.001 0.001 1135854.52
1 0.001 0.000 1080629.81
3 0.001 0.001 1061222.54
-
spss实训报告5
实训报告实验课程名称系部年级专业班学生姓名学号开课时间至学年第实验项目一数据整理与显示实验项目二描述统计量计算实验项目三参数估计实…
-
spss课程实习报告
安康学院经济与管理系课程实习报告课程名称统计分析软件实习实习时间实习地点信息管理与电子商务实验室班级专业11级信息管理与信息系统1…
-
统计分析与spss的应用实习报告
广东海洋大学统计分析与spss的应用实习报告学院系专业名称使用班级实习地点起止时间广东海洋大学职业技术学院会计电算化二班综合楼软件…
-
江财spss课程实践报告表
学生综合性实验报告学院工商管理学院课程名称SPSS技术分析专业班级11国际市场营销2班姓名舒振环学号0110294学生实验报告一实…
-
Spss上机实习内容
Spss上机实习内容实验一熟悉spss系统运行管理方式一上机要求1学习掌握spss打开与关闭的各种方法以及各种spss文件类型的打…
-
gps实习报告1
控制测量实习报告GPS静态控制测量实习报告目录1实习目的2分组及责任3实习仪器4实习内容5实习成果6实习心得7附录数据11实习目的…
-
兰州交通大学gps实习总结
GPS测量技术总结一、实习目的GPS静态测量本次GPS静态观测实习的目的是巩固、扩大和加深我们从课堂上所学理论知识,获得测量工作的…
-
GPS实习总结
实习小结这次GPS实习包括两大部分——GPS静态测量和动态测量。其中静态测量包括现有资料的收集、实地勘踏选点并进行标记、调度方案的…
-
gps实习报告
GPS测量与数据处理题目GPS实习报告学号08351205姓名龚炜班级测绘2班083512指导老师肖根如目录一实习目的二实习人员组…
-
gps定位实习报告
第一部分前言前言全球定位系统GlobalPositioningSystem是美国从20世纪70年代开始研制历时20年于19xx年全…