毕业设计(论文)机器人行走机构 文献综述
重 庆 理 工 大 学
毕业设计(论文)文献综述
题 目 机器人行走机构设计
二级学院 重庆汽车学院
专 业 机械设计制造及其自动化 班级
姓 名 学号
指导教师 系 主 任
时 间
评阅老师签字:
机器人行走机构
吴俊
摘要:行走机器人是机器人学中的一个重要分支。行走机构可以是轮式的、履带式的和腿式的等,能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。本文从国内外的研究状况着手,介绍了行走机器人的发展历史,研究现状和发展趋势。本文还介绍了国内最新的研究成果。
关键字: 机器人行走机构 发展 现状 应用
Keyword: robot travelling mechanism developing current situation application
一,前言
行走机器人是机器人学中的一个重要分支。关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等;其次,必须考虑驱动器的控制,以使机器人达到期望的行为;第三,必须考虑导航或路径规划。因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。机器人的机械结构形式的选型和设计,应该根据实际需要进行。在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作。对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一。
二、课题国内外现状
多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足动物运动形式的特种机器人, 是一种足式移动机构。所谓多足一般指四足及四足其以上, 常见的多足步行机器人包括四足步行机器人、六足步行机器人、八足步行机器人等。
步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个阶段:
第一阶段, 以机械和液压控制实现运动的机器人。
第二阶段, 以电子计算机技术控制的机器人。
第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。
三、研究主要成果
国内多足步行机器人的研究成果[1]:
1991年,上海交通大学马培荪等研制出JTUWM[1]系列四足步行机器人。JTUWM-III是模仿马等四足哺乳动物的腿外形制成,每条腿有3个自由度,由直流伺服电机分别驱动。在进行步态研究的基础上,通过对3个自由度的协调控制,可完成单腿在空间的移动。该机器人采用计算机模拟电路两级分布式控制系统, JTUWM-III以对角步态行走,脚底装有PVDF测力传感器,利用人工神经网络和模糊算法相结合,采用力和位置混合控制,实现了四足步行机器人JTUWM-III的慢速动态行走,极限步速为1.7 km/h。为了提高步行速度,将弹性步行机构应用于该四足步行机器人,产生缓冲和储能效果。
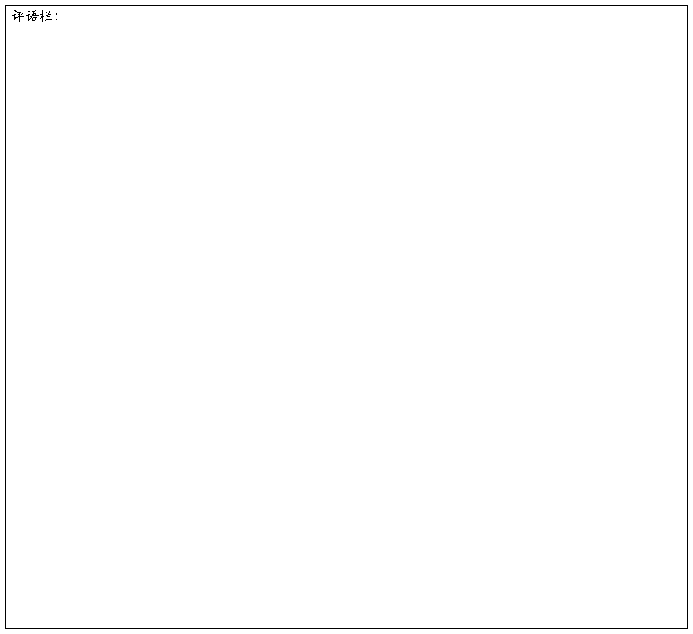
20##年,上海交通大学马培荪等对第一代形状记忆合金SMA驱动的微型六足机器人进行改进,开发出具有全方位运动能力的微型双三足步行机器人MDTWR[1],如图1所示。其第一代的每条腿只有2个自由度,无法实现机器人的转向,只能进行直线式静态步行,平均行走速度为1 mm/s。将机体的主体部分进行改进设计,由上下两层相互平行的三叉支架组成,将六足改进为双三足,引入身体转动关节,采用新型的组合偏动SMA驱动器,使新一代的微型双三足步行机器人MDTWR具有全方位运动能力。
20##年,上海交通大学的颜国正、徐小云等进行微型六足仿生机器人的研究[1],如图2所示。该步行机器人外形尺寸为:长30 mm,宽40 mm,高20 mm,质量仅为6.3 kg,步行速度为3 mm/s。他们在分析六足昆虫运动机理的基础上,利用连杆曲线图谱确定行走机构的尺寸,采用微型直流电机、蜗轮蜗杆减速机构和皮带传动机构,在步态和稳定性分析的基础上,进行控制系统软、硬件设计,步行实验结果表明,该机器人具有较好的机动性。


20##年哈尔滨工程大学的孟庆鑫、袁鹏等进行了两栖仿生机器蟹的研究,从两栖仿生机器蟹的方案设计到控制框架构建,研究了多足步行机的单足周期运动规律,提出适合于两栖仿生机器蟹的单足运动路线规划方法,并从仿生学角度研究了周期性节律性的多足步行运动的控制问题,建立了生成周期运动的神经振荡子模型。
国外多足步行机器人的研究成果[1] 。
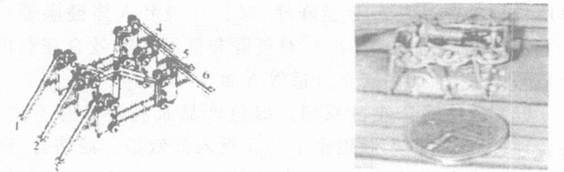
1990年,美国卡内基-梅隆大学研制出用于外星探测的六足步行机器人AMBLER[1],如图3所示。该机器人采用了新型的腿机构,由一个在水平面内运动的旋转杆和在垂直平面内作直线运动的伸展杆组成,两杆正交。该机器人由一台32位的处理机来规划系统运动路线、控制运动和监视系统的状态,所用传感器包括激光测距扫描仪、彩色摄像机、惯性基准装置和触觉传感器。总质量为3 180 kg,由于体积和质量太大,最终没被用于行星探测计划。
1993年,美国卡内基-梅隆大学开发出有缆的八足步行机器人DANTE[1],用于对南极的埃里伯斯火山进行了考察,其改进型DANTE-II也在实际中得到了应用,如图4所示。1994年,DANTE-II对距离安克雷奇145 km的斯伯火山进行了考察,传回了各种数据及图像。
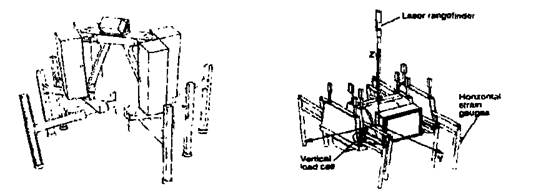
图3 AMBLER 图4 DANTE-II
1996~20##年,美国罗克威尔公司在DARPA资助下,研制自主水下步行机ALUV [1](Autonomous Legged UnderwaterVehicle),如图5所示。该步行机模仿螃蟹的外形,每条腿有两个自由度,具有两栖运动性能,可以隐藏在海浪下面,在水中步行,当风浪太大时,将脚埋入沙中。它的脚底装有传感器,用于探测岸边的地雷,当它遇到水雷时,自己爆炸同时引爆水雷。
在对昆虫步态进行研究的基础上,20##年美国研制出六足仿生步行机器人Biobot[1],如图6所示。为了像昆虫那样在凸凹不平地面上仍能高速和灵活步行,采用气动人工肌肉的方式,压缩空气由步行机上部的管子传输,并由气动作动器驱动各关节,使用独特的机构来模仿肌肉的特性。与电机驱动相比,该作动器能提供更大的力和更高的速度。

日本对多足步行机的研究从20世纪80年代开始,并不断进行着技术创新,随着计算机和控制技术的发展,其机械结构由复杂到简单,其功能由单一功能到组合功能,并已研究出各种类型的步行机。主要有四足步行机、爬壁机器人、腿轮分离型步行机器人和手脚统一型步行机器人。
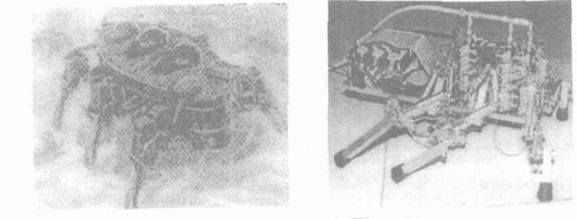
1994年,日本电气通信大学的木村浩(Hiroshi Kimura)等研制成功四足步行机器人Patrush-II[2],如图7所示。该机器人用两个微处理机控制,采用直流伺服电机驱动,每个关节安装了一个光电码盘,每只脚安装了两个微开关,采用基于神经振荡子模型CPG(Central Pattern Generator)的控制策略,能够实现不规则地面的自适应动态步行,显示了生物激励控制对未知的不规则地面有自适应能力的特点。
2000~20##年,日本的木村浩等又研制成功四足步行机器人Tekken[2],如图8所示。该机器人用一台PC机系统控制,采用瑞士Maxon直流伺服电机驱动,每个关节安装了一个光电码盘,并安装了陀螺仪、倾角计和触觉传感器。采用基于神经振荡子模型的CPG控制器和反射机制构成的控制系统,其中CPG用于生成机体和四条腿的节律运动,而反射机制通过传感器信号的反馈,来改变CPG的周期和相位输出,Tekken能适应中等不规则表面的自适应步行。

 四、行走机器人发展趋势分析
四、行走机器人发展趋势分析
首先,在国家知识产权局专利检索平台对相关专利进行了检索。以专利的申请时间为横坐标,申请数量为纵坐标,统计了行走机器人专利的发展趋势。

从图9可以看出,自1990年开始到20##年,行走机器人的研究近乎空白,2001到20##年,行走机器人的研究很少,从20##年至今,行走机器人的研究数量虽然有所增加,但最多也限于5件,今后,人们将逐渐关注到行走机器人的优势,并将其应用到生活及其它方面。下面就行走机器人研究的最新进展进行介绍和说明。
五、行走机器人的最新进展
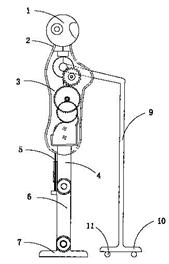
一种扶杖行走机器人[3],包括本体与扶杖。本体包括头部、肩膀、躯干、手部、大腿、小腿、与脚板。头部与肩膀共轴并套设在肩膀上,且可左右转动。肩膀下依次连接躯干、大腿、小腿及脚板。手部连接于躯干上;扶杖连接于手部。扶杖的底部装设万向轮。上述机器人可以利用扶杖支撑机器人行走时的部分重量,避免全部重量集中到机器人的双腿上引起其对地面冲击过大而易发生失去平衡的问题。
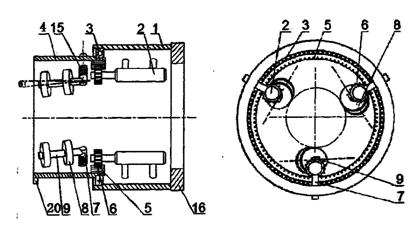
一种螺旋型驱动管道行走机器人[4] ,由动力驱动装置、行走导向装置以及连接这两部分的万向节(8)组成,动力驱动装置由电机(1)驱动圆形转子(5)构成,圆形转子(5)的外壁上分别安装有三组呈对称布置的轮架(2),每组轮架(2)上再安装二个轮子(3),其转动轴线与转子(5)的轴线呈一锐角倾斜角;而行走导向装置由一圆柱或圆筒形体(11)的外壁上安装有三组呈对称布置的导向轮架(12)组成,每组导向轮架(12)上再安装二个轮子(10),其转动轴线与圆柱或圆筒形体(11)的轴线相互垂直。动力驱动装置的转子(5) 上的轮架(2)和行走导向装置上圆柱或圆筒形体(11)的导向轮架(12)均为浮动体,且用弹簧(9)来产生一定的经向涨缩量使轮架(2)和导向轮架(12)上的所有轮子始终贴紧于管道的内壁。电机驱动后能使管道行走机器人沿管道轴线方向前进或后退。 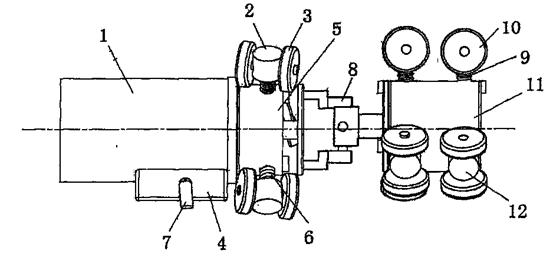
一种管道外行走机器人[5] ,由动力驱动装置、行走导向装置及其连接弹性元件组合体(11)组成,动力驱动装置由筒形体(1)和筒形驱动主体(4)通过滚动轴承(3)构成一个回转体,而筒形体(1)的内壁上固定安装有一个以上的电机(2),电机轴与筒形体(1)的轴线平行并安装有齿轮(6);而筒形驱动主体(4)内壁的一端固定安装有一个内齿圈(5)并与齿轮(6)相啮合,在其内壁上安装一组驱动轮(8),且其转动轴线与筒形驱动主体(4)的转动轴线呈一锐角;而行走导向装置的筒形导向主体(12)的内壁上安装有至少二组以上的导向轮(14),其转动轴线与筒形导向主体(12)的轴线相互垂直。安装架(7)和导向轮架(13)均为浮动体,且用弹性元件(15)来产生一定的径向涨缩量,使驱动轮(8)和导向轮(14)始终贴紧于管道(10)的外壁。 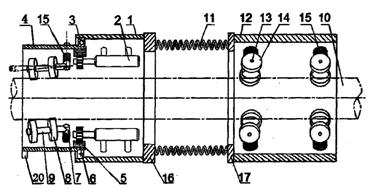
参考文献:
[1]雷静桃,高峰,崔莹.多足步行机器人的研究现状及展望[D].北京: 北京航空航天大学汽车工程系,200609.
[2]徐轶群, 万隆君. 四足步行机器人. 腿机构及其稳定性步态控制. 机械
科学与技术 .
[3]深圳先进技术研究院. 扶杖行走机器人. 200910003321.6;
[4]江苏工业学院. 一种螺旋型驱动管道行走机器人. 200910030752.1;
[5]江苏工业学院. 一种管道外行走机器人. 200910180084.0
第二篇:毕业设计(论文)文献综述模板
武汉理工大学
毕业设计(论文)
开题报告及文献综述
论文题目
学院(系): 理学院
专业班级: 电信科0802班
学生姓名: 孙阳
指导教师: 刘成国
本科生毕业设计(论文)任务书
学生姓名: 孙 阳 专业班级: 电信科0802
指导教师: 刘成国 工作单位: 武汉理工大学
设计(论文)题目: 智能加温控制器的改进设计与实现
设计(论文)主要内容:
(1) 研究已有智能温控系统,确定系统改进方案;
(2) 设计各子系统电路,完成控制电路、显示电路和整机的设计与实现;
(3) 研究改进的控制模式,形成代码,在单片机系统中运行;
(4) 翻译与本题目有关的外文文献;
(5) 撰写毕业论文。
要求完成的主要任务:
(1) 查阅不少于15篇的相关资料,其中英文文献不少于2篇,完成开题报告;
(2) 完成电路的设计、系统的联试和整机调式、安装;
(3) 测试系统功能,完善系统样机功能;
(4) 按要求完成不少于5000汉字的英文文献翻译;
(5) 完成不少于12000字数的毕业论文。
必读参考资料:
[1] 高峰. 单片微型计算机原理与接口技术.科学出版社[M].2009
[2] Zhang Huaguang, He Xiji, Fuzzy auto-adapting control and application[J], The publishing company of Beijing University of Aeronautics &Astronautics, 297-306,2002.
[3] Li Zhuo, Xiao Deyun, He Shizhong, Fuzzy auto-adapting PID control method based on neural network[J], Control and decision-making, (3), 340-345, 1996.
指导教师签名: 系主任签名:
院长签名(章)
武汉理工大学
本科生毕业设计(论文)开题报告
本科生毕业设计(论文)文献综述
一、前言[U1] (说明写作目的,介绍有关概念、综述范围,扼要说明有关主题或争论焦点)
××××××××××××××××××××××××××××××××××××××××[U2]
1. ×××[微软中国3]
××××××××××××××××××××××××××××××××××××××××[1]。
2. ×××
××××××××××××××××××××××××××××××××××××××××
二、主题部分(阐明有关主题的历史背景、现状和发展方向,以及对这些问题的评述)
1. ×××
××××××××××××××××××××××××××××××××××××××××
2. ×××
三、总结部分(将全文主题进行扼要总结,提出自己的见解并对进一步的发展方向做出预测)
××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
四、参考文献
[1] 刘国钧,陈绍业,王风翥.图书馆目录[M].北京:高等教育出版社,1957.
[2] Schacht E.Industrial polysaccharides[M].Amsterdam:Elsevier Science,1987.
[3] 辛希孟.信息技术与信息服务国际研讨会论文集:A集[C].北京:中国社会科学出版社,1994.
[4] 张筑生.微分半动力系统的不变集[D].北京:北京大学数学系数学研究所,1983.
[5] 冯西桥.核反应堆压力管道与压力容器的LBB分析[R].北京:清华大学核能技术设计研究院,1997.
[6] [微软中国4] 金显贺,王昌长,王忠东,等.一种用于在线检测局部放电的数字滤波技术[J].清华大学学报(自然科学版),1993,33(4):62-67.
[7] Spriggs G E.A history of fine grained hardmetal[J]. Int J of Refractory Metal and Hard Material,1995,13:241-255.
开题报告及文献综述成绩评定表
指导教师签字:
年 月 日
[U1]
1级标题:黑体小2号,段前段后1,1.5行间距
[U2]宋体小4,多倍行距1.25
[微软中国3]
2级标题:黑体小3号,段前段后0.5,行间距1.5
[微软中国4]宋体小4,多倍行距1.25
英文用Times New Roman
编排格式:[序号] 主要责任者.文献题名[文献类型标识].出版地:出版者,出版年.
-
旅游业电子商务论文,文献综述
本科毕业论文文献综述旅游电子商务文献综述二级学院专业班级学生姓名学号指导教师年月日摘要:旅游电子商务是电子商务在旅游业中的具体应用…
-
毕业论文文献综述怎么写
文献综述是对某一方面的专题搜集大量情报资料后经综合分析而写成的一种学术论文,它是科学文献的一种。文献综述是反映当前某一领域中某分支…
-
vjhlcc毕业论文文献综述怎么写
-+懒惰是很奇怪的东西,它使你以为那是安逸,是休息,是福气;但实际上它所给你的是无聊,是倦怠,是消沉;它剥夺你对前途的希望,割断你…
-
【byspaper】英语专业学位论文文献综述的“三述”撰写法
英语专业学位论文文献综述的“三述”撰写法摘要:针对英语专业学位论文文献综述“引言”个人观点缺失、“主体”文献资料罗列、“结论”主题…
-
关于毕业设计(论文)文献综述的写作要求 - 福州大学
生工学院关于毕业设计(论文)任务书等格式的要求毕业设计(论文)是本科生在校学习的最后一个重要环节,为了有效保证毕业设计(论文)的质…
-
起重机文献综述
杭州电子科技大学毕业设计(论文)文献综述毕业设计(论文)题目文献综述题目学院专业姓名班级学号指导教师载重5吨车间行吊小车机构设计起…
-
文献综述
本科毕业设计文献综述双柱液压汽车举升机的结构设计学生:虞柯发学号:11013030435专班级:A1014指导教师:余香梅机械与材…
-
文献综述(范文)
武汉生物工程学院毕业设计文献综述题目名称井用升降绞车的设计题目类别毕业设计系别机电工程系专业班级08机械设计本3姓名指导教师**辅…
-
机械设计毕业论文文献综述
毕业设计论文文献综述抗风测试装置综述1引言天线升降杆是为升降天线而设计随着机动车载天线需求量的增加天线升降杆已经得到广泛应用但为填…
-
机械论文文献综述
文献综述(20XX届)木工用抛光机现状及其发展方向学生姓名***学号****院系工学院机电系专业机械设计制造及其自动化指导教师娄建…