dsp实验报告
———西南科技大学城市学院-----
课程设计报告
题目 : 基于DSP2407的数字电压表
系别: 机电工程系
专业 : 电信
班级 : 1101
指导教师 :
实验人员 :
第一章 系统设计
第一节 课题目标及整体方案
1.1.1课程目标
以DSP2407为核心,设计一个数字电压表。采用中断方式,对2路0~5V的模拟电进行循环采集,采集的数据送LED显示,并存入内存。超过界限时指示灯闪烁。
1.1.2 整体方案
通过对DSP2407的I/O的运用,实现4个LED显示0~5V的电压。具体实现原理如下表1—1。
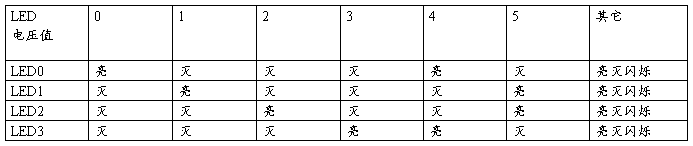
表 1—1
第二节 硬件平台简介
1.2.1 硬件结构
引脚说明
JTAG接口:本板卡和DSP仿真器连接接口,通过本接口用户可进行在线仿真
步进电机接口:接上步进电机可进行步进电机控制实验
AD输入接口:2路带运放隔壁的AD输入接口
DA输出接口:4路DA输出接口
CAN接口:CAN总线接口插座
RS232接口:标准的DB9插座
2407全功能引出接口,方便用户扩张使用
1.2.2 具体硬件结构图

图 1—1
1.2.3 I/O模块介绍
1、下表为I/O空间分配

表1—2
2、I/O空间介绍2.2.2 I/O控制模块介绍
数字输入/输出模块是集成在TMS320LF2407A片内的外设之一,它主要对芯片的通用、双向的数字I/O(GPIO)引脚进行控制。这些I/O引脚大多数是基本功能和一般I/O复用的引脚,数字I/O模块采用了一种灵活的方法,以控制专用I/O和复用I/O引脚的功能,所有I/O和复用引脚的功能可通过9个16位控制寄存器来设置,这些寄存器可分为两类:
·I/O口复用控制寄存器(MCRx):用于控制选择I/O口作为基本功能方式或一般I/O引脚功能;
·数据和方向控制寄存器(PxDATDIR):当I/O口用作一般I/O引脚功能时,用数据和方向控制寄存器可控制数据和到双向I/O引脚的数据方向,这些寄存器直接和双向I/O引脚相连。
具体控制寄存器的访问地址、定义请参见有关资料。
3、 I/O管脚及使用方法
ICETEK-LF2407-A板使用了一些I/O管脚对DSP进行控制。例如:跳线JP6连接DSP上MP/MC管脚,在DSP复位时,DSP可读回这一管脚的设置,当管脚接高电平时,DSP采用微处理器(MP)方式工作,否则设置成微控制器(MC)方式。
ICETEK-LF2407-A板在扩展插头上将未使用的I/O引脚接出,提供给用户连接使用。其定义见ICETEK-LF2407-A板说明。这些管脚支持0-3.3V逻辑电平操作,用户在进行相应设置后可以在I/O管脚上进行输入或输出操作,使用时须注意根据引脚本身的负载能力驱动相关设备。
4、 ICETEK-LF2407-EDU实验箱及控制模块使用的I/O管脚
ICETEK-LF2407-EDU实验箱将引脚ADCIN00-ADCIN03连接到了实验箱底板上“A/D输入”的四个插座上。
ICETEK-LF2407-EDU实验箱控制模块使用如下引脚:
PWM12/IOPE6--指示灯
PWM11/IOPE5和TDIRB/IOPF4—步进电机
CANTX/IOPC6—蜂鸣器
第三节 软件系统设计
1.3.1 软件流程图

1.3.2试验程序
1、 实验主程序如下:
#include "global.c"
void SystemInit();
void Timer1Init();
void KickDog();
void KeyLed();
void dianya_disply(int m);
unsigned int numled=0;
Void delay(int i);
main()
{
int t;
SystemInit(); //系统初始化
MCRC=MCRC & 0xFF00; //IOPE0-7设为IO口模式
PEDATDIR=0xFF00; //所有LED=0,
asm(" CLRC INTM ");
Timer1Init(); //定时器初始化
t=3;
if(0 <= t && t<=5)
{ dianya_disply(t); }
else
{
while(1)
{
KeyLed();
}
}
}
2、程序分析
主程序主要是通过对各程序的调用驱动硬件实现数字电压表的功能。比如对系统初始化、定时器初始化等。
其余被调用程序在附录中,在此不作详解。
第二章 心得体会
1、通过我对ARM芯片运用实现了数字电压的显示;
2、让我对DSP的了解更深,更透彻;
3、让我对语言的运用更加熟练;
4、让我对这门学科有更深切的热爱。
附录1
系统初始化
void SystemInit()
{
asm(" SETC INTM "); /* 关闭总中断 */
asm(" CLRC SXM "); /* 禁止符号位扩展 */
asm(" CLRC CNF "); /* B0块映射为 on-chip DARAM*/
asm(" CLRC OVM "); /* 累加器结果正常溢出*/
SCSR1=0x02FC; /* 系统时钟CLKOUT=20*2=40M */
WDCR=0x006F; /* 禁止看门狗,看门狗时钟64分频 */
KickDog(); /* 初始化看门狗 */
IFR=0xFFFF; /* 清除中断标志 */
IMR=0x0002; /* 打开中断2*/
}
附录2
定时器初始化
void Timer1Init()
{
EVAIMRA=0x0080; // 定时器1周期中断使能
EVAIFRA=0xFFFF; // 清除中断标志
GPTCONA=0x0000;
T1PR=2500; // 定时器1初值,定时0.4us*2500=1ms
T1CNT=0;
T1CON=0x144E; //增模式, TPS系数40M/16=2.5M,T1使能
}
附录3
LED灯亮灭
void KeyLed()
{
PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
Delay(1000);
PEDATDIR=PEDATDIR | 0x0FF; //IOPE3=1;LED4亮
}
附录4
中断
void interrupt c_int2() /*定时器1中断服务程序*/
{
if(PIVR!=0x27)
{ asm(" CLRC INTM ");
return;
}
T1CNT=0;
numled++;
EVAIFRA=0x80;
asm(" CLRC INTM ");
}
附录5
看门狗
void KickDog() /*踢除看门狗 */
{
WDKEY=0x5555;
WDKEY=0xAAAA;
}
附录6
数字电压
Void dianya_disply(int m)
{
switch(m)
{
case 0 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0x0002; //IOPE=1;LED1亮
break;
case 1 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0x4; //IOPE2=1;LED2亮
break;
case 2 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0x8; //IOPE3=1;LED3亮
break;
case 3 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0x10; //IOPE3=1;LED4亮
break;
case 4 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0xc; //IOPE3=1;LED4亮
break;
case 5 :PEDATDIR=PEDATDIR & 0xFF00; //IOPE1,2,3,4=0;LED全灭
PEDATDIR=PEDATDIR | 0x12; //IOPE3=1;LED4亮
break;
}
}
附录7
延时
Void delay(int i)
{
int m,n=0;
for(m=0;m
for(n=0;n
}
-
spss实验报告
湖北汽车工业学院SPSS实习报告学号20xx0530501姓名杨文弟指导教师彭娟娟曾智实验一描述性统计分析一实验目的利用SPSS进…
-
spss对数据进行相关性分析实验报告
管理统计实验报告实验一一实验目的掌握用spss软件对数据进行相关性分析熟悉其操作过程并能分析其结果二实验原理相关性分析是考察两个变…
-
spss实验报告1
统计分析与SPSS的应用实验报告一一数据来源及说明本次试验报告数据来源于19xx年美国社会变迁普查19xxUSGeneralSoc…
-
spss实验报告模板
实验报告实验三连续变量的统计描述与参数估计实验目的1了解连续变量的统计描述指标体系和参数估计指标体系2掌握具体案例的统计描述和分析…
- 统计分析spss实验报告
-
dsp实验报告心得体会
TMS320F2812xDSP原理及应用技术实验心得体会1.设置环境时分为软件设置和硬件设置,根据实验的需要设置,这次实验只是软件…
-
dsp课程设计实验报告总结
DSP课程设计总结(20##-20##学年第2学期)题目:专业班级:电子1103学生姓名:学号:指导教师:设计成绩:20##年6月…
-
DSP实验报告+心得体会
龙岩学院实验报告班级07电本(1)班学号XX姓名XX同组人独立实验日期20XX-5-18室温大气压成绩基础实验一、实验目的1.掌握…
-
dsp实验报告
FIR数字滤波器的设计目录1前言22数字滤波器及MATLAB语言概述221数字滤波器的定义和分类322常用滤波器的性能指标423M…
-
dsp实验报告
实验一代数汇编指令基础实验一实验目的1通过调试目标代码掌握指令的功能熟悉指令2通过指令的熟悉能够指令应用于实际项目中二实验原理Ti…
-
dsp实验报告
DSP实验课大作业实验报告题目在DSP上实现线性调频信号的脉冲压缩动目标显示和动目标检测一实验目的1了解线性调频信号的脉冲压缩动目…