《先进制造技术》实验指导书
实验一:数控电火花线切割机床基本操作
一、实验名称:数控电火花线切割机床操作
二、实验目的:
1.了解电火花线切割机床工作原理;
2.了解电火花线切割机床的基本结构;
3.掌握电火花线切割加工的电加工参数选择;
4.掌握电火花线切割机床的基本操作。
三、实验设备及辅助设施:
1.设备:苏州长风DK7725E型线切割机床;
2.电极丝:φ0.2mm钼丝500m;
3.材料:100X100X5mm钢板1片。
4.量具:0-125mm游标卡尺、150mm钢板尺。
四、实验方法
先由实验老师进行讲解及现场操作演示,再让学生在老师指导下,动手操作机床。实验完毕后,认真完成实验报告。
五、实验步骤:
1.电火花线切割加工技术简介(老师讲解)
电火花线切割加工是电火花加工的一个分支,是一种直接利用电能和热能进行加工的工艺方法,它用一根移动的导线(电极丝)作为工具电极对工件进行切割,故称线切割加工。线切割加工中,工件和电极丝的相对运动是由数字控制实现的,所以,又称为数控电火花线切割加工,简称线切割加工。
2.电火花线切割加工原理(老师讲解)
电火花数控线切割的加工过程包含下列三部分内容:
电极丝与工件之间的脉冲放电;
电极丝沿其轴向(垂直或Z方向)作走丝运动;
工件相对于电极丝在XOY平面内作数控运动。
⑴ 电极丝与工件之间的脉冲放电
电火花线切割时,电极丝接脉冲电源的负极,工件接脉冲电源的正极。在正负极之间加上脉冲电源 ,当来一个电脉冲时,在电极丝和工件之间产生一次火花放电,在放电通道的中心,温度瞬时可高达10000度以上,高温使工件金属、电极丝和工件之间的工作液熔化或部分气化,产生的蒸汽瞬间迅速热膨胀,并具有爆炸特性。这种热膨胀和局部微爆炸,将熔化和汽化了的金属材料抛出,从而实现对工件材料进行电蚀切割加工。放电间隙在0.01mm左右。
为了电火花加工的顺利进行,必须创造条件保证每来一个电脉冲时,在电极丝和工件之间产生的是火花放电而不是电弧放电。首先,必须使两个电脉冲之间有足够的时间,使放电间隙中的介质消电离,即使放电通道中的带电粒子复合为中性粒子,恢复本次放电通道处间隙中介质的绝缘强度,以免总在同一处发生放电而导致电弧放电。一般脉冲间隙为脉冲宽度的4倍以上。
为了保证火花放电时电极丝不被烧断,必须向放电间隙处注入大量工作液,以便电极丝得到充分冷却。同时,电极丝还必须作高速轴向运动,以免火花放电总在电极丝局部位置进行而被烧断。快速走丝速度一般为7~10m / s,电极丝作高速运动,还有利于不断往放电间隙中带入新的工作液。同时,把电蚀产物从间隙中带出。
⑵ 电火花线切割加工的走丝运动
走丝运动过程中,钼丝必须整齐地缠绕在储丝筒上,因此,储丝筒除了作旋转运动外,还必须按一定速度作轴向运动。储丝筒轴向运动速度(mm/r)应略大于电极丝直径(mm)。否则,走丝时会产生叠丝现象而导致断丝。
⑶ X、Y坐标工作台的数控运动
工件安装在XOY坐标工作台上,分别由X向和Y向的步进电机驱动作数控运动,而工件相对于电极丝的运动轨迹,由线切割编程决定。
脉冲当量:即步进电机每接受一个脉冲时,驱动工作台移动的距离。一般为0.001mm (编程的数据单位)。
步距角:每接受一个进给脉冲时,步进电机所转动的角度。
产生稳定电火花线切割加工的必要条件:一是要有脉冲电源;二是工件与电极丝之间始终保持稳定的放电间隙(约0.01-0.02mm);三是火花放电必须是在具有一定绝缘强度的液体绝缘介质中进行。
3.电火花线切割机床的基本结构(老师讲解)
以本实训中心所购机型DK7725E为例
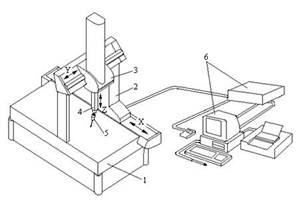
 本机床由机床主机和控制柜两大部分组成,配有CNC-10A型自动编程和控制系统。其机床主机结构如图所示。
本机床由机床主机和控制柜两大部分组成,配有CNC-10A型自动编程和控制系统。其机床主机结构如图所示。

⑴ DK7725E型线切割机床主要技术参数
工作台横向行程:250mm ;
工作台纵向行程:320 mm ;
加工工件最大厚度:300mm ;
加工工件最大锥度:6°/100 mm;
加工表面粗糙度:Ra≤2.5um ;
最高材料去除率:≈100 /mim ;
/mim ;
 ⑵ DK7725E型线切割机床传动系统
⑵ DK7725E型线切割机床传动系统
工作台传动路线。如图
X向:控制系统发出进给脉冲——步进电机D——齿轮4/齿轮3——横向丝杠1——螺母8。
Y向:控制系统发出进给脉冲——步进电机E
——齿轮5/齿轮6——纵向丝杠2——螺母7。
运丝部件的传动路线。如图
电动机G——联轴器——运丝筒高速旋转——齿轮9/齿轮10——齿轮11/齿轮12——丝杠13——螺母14带动拖板——行程开关。运丝装置带动电极丝按一定线速度运动,并将电极丝整齐地排绕在运丝筒上,行程开关控制运丝筒的正反转。
⑶ DK7725E型线切割机床电气和脉冲电源简介
机床电气柜操作面板。如图
SA1——脉冲宽度选择 SA2~SA7——功率管选择
SA8——电压幅值选择 RP1——脉冲间隔调节
PV1——电压幅值指示
急停按钮——按下此键,机床运丝、水泵电机全停,脉冲电源输出切断。
脉冲电源参数设置
脉冲宽度ti选择开关SA1共分六档,从左边开始往右边分别为:
第一档:5us 第二档:15us 第三档:30us
第四档:50us 第五档:80us 第六档:120us
 功率管个数选择开关SA2~SA7可控制参加工作的功率管个数,如六个开关均接通,六个功率管同时工作,这时峰值电流最大。如五个开关全部关闭,只有一个功率管工作,此时峰值电流最小。每个开关控制一个功率管。
功率管个数选择开关SA2~SA7可控制参加工作的功率管个数,如六个开关均接通,六个功率管同时工作,这时峰值电流最大。如五个开关全部关闭,只有一个功率管工作,此时峰值电流最小。每个开关控制一个功率管。
 幅值电压选择开关SA8用于选择空载脉冲电压幅值,开关按至“L”位置,电压为75V左右,按至“H”位置,则电压为100V左右。
幅值电压选择开关SA8用于选择空载脉冲电压幅值,开关按至“L”位置,电压为75V左右,按至“H”位置,则电压为100V左右。
改变脉冲间隔t0调节电位器RP1阻值,可改变输出矩形脉冲波形的脉冲间隔t0,即能改变加工电流的平均值,电位器旋置最左,脉冲间隔最小,加工电流的平均值最大。
电压表PV1,由0~150V直流表指示空载脉冲电压幅值。
⑷ 各种电加工参数的合理选择
正确选择脉冲电源加工参数,可以提高加工工艺指标和加工的稳定性。粗加工时, 应选用较大的加工电流和大的脉冲能量,可获得较高的材料去除率(即加工生产率)。而精加工时,应选用较小的加工电流和小的单个脉冲能量,可获得加工工件较高的表面粗糙度。
加工电流就是指通过加工区的电流平均值,单个脉冲能量大小,主要由脉冲宽度、峰值电流、加工幅值电压决定。脉冲宽度是指脉冲放电时脉冲电流持续的时间,峰值电流指放电加工时脉冲电流峰值,加工幅值电压指放电加工时脉冲电压的峰值。
下列电规准实例可供使用时参考:
精加工:SA1选择左面开始第一档,SA8按至“L”位置,幅值电压为75V左右,SA2、SA3接通,调节电位器RP1,加工电流在0.8~1.2A,加工表面粗糙度Ra≤2.5um。
最大材料去除率加工:SA1选择左面开始第四档,SA8按至“H”位置,幅值电压为100V左右,SA2~SA7全部接通,调节RP1,加工电流控制在4~4.5A,可获得100/min左右的去除率(加工生产率)。(材料厚度在40~60mm左右)。
大厚度工件加工(>300mm):幅值电压打至“H”档,SA1选第五、六档,功率管开4~5个,加工电流2.5~3A,材料去除率>30/min。
较大厚度工件加工(60~100mm):幅值电压打至高档,SA1选取第五档,功率管开4个,加工电流调至2.5~3A,材料去除率50~60/min。
薄工件加工:幅值电压选低档,SA1选第一或第二档,功率管开2~3个,加工电流调至1A左右。
使用时注意事项:
a.)切割加工时进给速度和电蚀速度要协调好,不要欠跟踪或跟踪过紧,欠跟踪时使加工经常处于开路状态,电流不稳定,容易造成断丝,过紧跟踪时容易造成短路,也会降价材料去除率,一般调节变频进给,使加工电流为短路电流的0.85倍左右,电流表指针略有晃动即可。
b.)改变加工的电规准,必须关断脉冲电源输出,(调整间隔电位器RP1除外),在加工过程中一般不应改变加工电规准,否则会造成加工表面粗糙度不一样。
4.机床操作步骤(老师演示)
⑴ 合上机床主机上电源开关;
⑵ 合上机床控制柜上电源开关,启动计算机,双击计算机桌面上YH图标,进入线切割控制系统;
⑶ 解除机床主机上的急停按钮;
⑷ 按机床润滑要求加注润滑油;
⑸ 开启机床空载运行二分钟,检查其工作状态是否正常;
⑹ 按所加工零件的尺寸、精度、工艺等要求,在CNC-10A线切割自动编程系统中编制线切割加工程序,并送控制台。或手工编制加工程序,并通过软驱读入控制系统;
⑺ 在控制台上对程序进行模拟加工,以确认程序准确无误;
⑻ 工件装夹;
装夹工件前先校正电极丝与工作台的垂直度;
选择合适的夹具,将工件固定在工作台上;
选择合理的工件装夹位置,保证工件的加工区域在机床行程范围之内;
根据工件图纸要求,用百分表等量具找正基准面;
⑼ 开启运丝筒;
⑽ 开启冷却液;
⑾ 选择合理的电加工参数;
⑿ 手动或自动对刀;
⒀ 点击控制台上的“加工”键,开始自动加工;
⒁ 加工完毕后,按“Ctrl+Q”键退出控制系统,并关闭控制柜电源;
⒂ 拆下工件,清理机床;
⒃ 关闭机床主机电源。
5.学生操作实验
每位学生按老师演示步骤操作一遍。
实验完毕,由学生清理机床及实验场所,并作好实验记录。
6.实验作业题:
(1).简述数控电火花线切割机床工作原理;
(2)数控电火花线切割加工时,如何合理选择电加工参数?
(3).在线切割机床的自动编程系统上,设计一个线切割加工零件图,并生成G代码程序和3B格式程序。
第二篇:先进制造技术实验指导书(诉法)
逆向工程技术
实验指导书
福建工程学院机电及自动化工程系
20##年7月
实验1 三坐标测量机测量实验
—、实验要点
1.了解三坐标测量机的原理、组成及各部分的作用;
2.熟悉三坐标测量机的主要技术规格;
3.观察三坐标测量机的工作过程,了解三坐标测量机测量软件LKDMIS的基本使用。
4.学习平行度、垂直度等位置公差或形状公差的测量方法:
二、实验目的
1.正确描述三坐标测量机的原理、组成及各部分的作用;
2.了解三坐标测量机测量软件LKDMIS的基本使用。
三、实验设备
三坐标测量机:三坐标测量机是一种高效、新颖的精密测量仪器。它广泛应用于机械制造、仪器制造、电子工业、航空工业等各领域。
应用三坐标测量机可对直线坐标、平面坐标以及空间三维尺寸进行测量,可以测量球体直径、球心坐标、曲线曲面轮廓、各种角度关系以及凸轮、叶片等复杂零件的几何尺寸和形状位置误差。
三坐标测量机测量精度高,速度快,软件功能强大,是测量行业不可或缺的高级仪器。
四、三坐标测量机的组成及工作原理
1. 三坐标测量机的组成
 三坐标测量机是典型的机电一体化设备,它由机械系统和电子系统两大部分组成。
三坐标测量机是典型的机电一体化设备,它由机械系统和电子系统两大部分组成。
(1)机械系统:一般由三个正交的直线运动轴构成。如图1所示结构中,X向导轨系统装在工作台上,移动桥架横梁是Y向导轨系统,Z向导轨系统装在中央滑架内。三个方向轴上均装有光栅尺用以度量各轴位移值。人工驱动的手轮及机动、数控驱动的电机一般都在各轴附近。用来触测被检测零件表面的测头装在Z轴端部。
(2)电子系统:一般由光栅计数系统、测头信号接口和计算机等组成,用于获得被测坐标点数据,并对数据进行处理。
2. 三坐标测量机的工作原理
三坐标测量机是基于坐标测量的通用化数字测量设备。它首先将各被测几何元素的测量转化为对这些几何元素上一些点集坐标位置的测量,在测得这些点的坐标位置后,再根据这些点的空间坐标值,经过数学运算求出其尺寸和形位误差。如图2所示,要测量工件上一圆柱孔的直径,可以在垂直于孔轴线的截面I内,触测内孔壁上三个点(点1、2、3),则根据这三点的坐标值就可计算出孔的直径及圆心坐标OI;如果在该截面内触测更多的点(点1,2,…,n,n为测点数),则可根据最小二乘法或最小条件法计算出该截面圆的圆度误差;如果对多个垂直于孔轴线的截面圆(I,II,…,m,m为测量的截面 圆数)进行测量,则根据测得点的坐标值可计算出孔的圆柱度误差以及各截面圆的圆心坐标,再根据各圆心坐标值又可计算出孔轴线位置;如果再在孔端面A上触测三点,则可计算出孔轴线对端面的位置度误差。由此可见,CMM的这一工作原理使得其具有很大的通用性与柔性。从原理上说,它可以测量任何工件的任何几何元素的任何参数。
圆数)进行测量,则根据测得点的坐标值可计算出孔的圆柱度误差以及各截面圆的圆心坐标,再根据各圆心坐标值又可计算出孔轴线位置;如果再在孔端面A上触测三点,则可计算出孔轴线对端面的位置度误差。由此可见,CMM的这一工作原理使得其具有很大的通用性与柔性。从原理上说,它可以测量任何工件的任何几何元素的任何参数。
五、实验步骤
 检测
检测 25中心O1与25中心O2的中心距。实验步骤如下:
25中心O1与25中心O2的中心距。实验步骤如下:
1.将试件1放在测量平台上。
建立工件测量坐标系:将坐标系的三个轴的方向和坐标原点建立在零件上,用于一些同类零件的程序控制自动测量。
在试件上分别测量一个平面、一条直线、一个点。约束试件的六个自由度。在同一Z轴高度上,分别测量两个圆,手动采点8个,并且报告两个圆的的直径尺寸。
移动测针到被测圆弧面上方,手动采点若干个(分析为什么采点个数不同而造成结果也不同?)。
2.两个圆的中心距离
将试件1放在测量平台上。建立工件测量坐标系:在试件上分别测量一个平面、一条直线、一个点。约束试件的六个自由度。测量两个圆的中心矩。
报告两个圆的中心距离。
六、实验结果
填好如下表格
1.

2.

七、实验报告要求
1.写出实验目的、实验设备、实验的步骤及实验结果。
2.对测量结果进行分析。
3. 三坐标测量机应用于什么样的场合?测量原理如何?
实验2 快速原型机加工实验
—、实验要点
1.了解快速原型设备的组成及各部分的作用;
2.熟悉快速原型设备的主要技术规格;
3.观察快速原型设备的工作过程,了解其工作原理。
二、实验目的
1.正确描述快速原型设备的组成及各部分的作用;
2.了解快速原型设备的主要技术参数的设定;
3.了解SLS方法的工作原理。
三、实验设备
AFS-320MZ/Q自动成型机由机械主体部分、光学系统和控制系统三部分组成。
(1)机械主体部分由机架、工作平台、铺粉机械、活塞缸、集料箱、加热灯和通风除尘装置组成。工作平台用于安装铺粉机构和活塞缸。铺粉机构的作用是将成型粉料铺平,由两根密封式导轨、铺粉车驱动电机(步进电机)、联轴器、铺粉小车和铺粉车罩组成。活塞缸由缸体、活塞、密封圈、精密滚珠丝杠、步进电机等组成,其中一个用于储备成型粉料和供料,称为料缸;另一个用于成型烧结,称为成型缸,两缸结构相同。集料箱用于收集成型过程中多铺的粉料及卸料。加热灯安装在滑动导轨上,其作用是将成型缸表面的粉均匀加热,以节省激光能量及减少成型过程中由于受热不均匀所产生的变形。通风除尘装置由通风管路和滤尘箱组成,用于排除工作过程中产生的粉尘和烟雾。
成型机的运动部件有:两个活塞缸中的活塞通过精密滚珠丝杆做上下往复运动;铺粉小车通过两根直线导轨做直线往复运动;铺粉辊沿铺粉方向做逆时针转动。直线导轨和滚珠丝杠上均装有限位装置,使这些运动部件的运动限制在行程范围之内。

(2)光学系统如图5所示,用于生成激光并控制其运动,最终对粉末材料进行选区烧结。光学系统主要部件有激光器、扫射镜、扩束聚焦系统、扫描器、窗口、光束合成器和指示光源等。
(3)控制系统是一个由计算机控制的开环控制系统。其原理是:计算机一方面控制铺粉装置进行铺粉,将成型粉料均匀地铺在烧结表面上,另一方面控制激光器和扫描器动作,使激光束在工作平面上不断扫描。完成一层的烧结后,成型缸活塞下降一定高度,料缸上升一定高度,铺粉装置进行铺粉,系统进行新一层的烧结。不断重复上述过程,直至完成整个零件的加工。
铺粉装置含有四台步进电机(两台用于驱动料缸和活塞缸的上下运动、另两台分别用于驱动铺粉小车的水平运动和滚轮转动),系统通过AT6400卡对各个步进电机进行控制。
四、工作流程
RP技术的工作原理是:根据零件的三维CAD实体模型,利用专业切片软件对其进行切片处理,得到模型每层截面的轮廓,再在快速原型设备中用激光或其它方法将材料进行逐层成型,从而形成零件的原型。RP技术的工作原理可简单地概括为数据离散、材料堆积。由于RP技术是将复杂三维实体通过切片转换为二维来加工的,因此通常又称为层加工(Layer Manufacturing)。RP技术打破了传统的制造模式,利用离散/堆积的原理,由CAD模型直接驱动,快速完成任意复杂形状的原型和零件。

SLS(选择性激光烧结)成型技术的工作原理如6所示。在成型时,铺
图6 SLS成型技术的工作原理
粉装置先在成型缸中铺上一层粉末材料,然后激光束在计算机的控制下,按照截面轮廓信息,对制件实体部分所在的区域进行扫描,使粉末的温度升高并达到熔点,粉末颗粒被熔化而相互粘结,激光束不断扫描直至完成一层截面的成型。在该层中,非烧结区的粉末未被激光扫描,因此仍然是松散的粉末,这些松散的粉末可作为工件和下一层粉末的支撑。完成一层的成型后,成型缸下降一个截面层的高度,同时料缸上升一定的高度,进行下一层的铺粉和扫描烧结,如此循环,最终完成整个制件的成型。
选择性激光烧结具有成型材料类型多、成型工艺简单、成型成本较低等特点。从成型原理上说,SLS成型方法可适用于任何粉末材料,是目前成型材料种类最多的一种快速原型技术。目前在实际应用中,工艺较成熟的成型材料有石蜡和塑料,陶瓷、金属等成型材料由于熔点较高,尚处理研究阶段。在AFS-320MZ/Q自动成型机上,其工作流程如图7所示。
1. 零件造型、生成STL文件
 应用CAD/CAM软件完成零件的三维实体造型,并通过数据接口输出STL文件。应该注意的是:进行零件造型时,最终必需用实体模型来表达。
应用CAD/CAM软件完成零件的三维实体造型,并通过数据接口输出STL文件。应该注意的是:进行零件造型时,最终必需用实体模型来表达。
2. 零件切片、生成CLI文件
由于RP工艺是按一层一层截面轮廓进行加工的,因此加工前必须在三维模型上沿成形高度方向每隔一定的间距进行切片处理,以便提取截面的轮廓。可以说,零件切片是快速原型技术中的重要环节。目前常用的切片软件有Magic RP、等。下面以Magic RP 6.2为例简要介绍切片软件的使用(图8为Magic RP6.2软件的用户界面)。
(1)打开文件:在下拉菜单中点击File→Load Part(或按Ctrl+L),选择需要打开的STL文件。
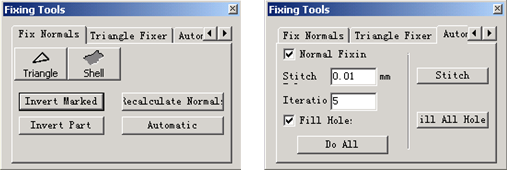
(2)零件修复:打开文件后,首先要对零件进行修复,检查其是否存在缺陷。按F9,系统弹出零件属性对话框,若对话框中“Bad Edges”或“Bad Contours”不为零,则说明零件存在缺陷,需要进行修复。
 在图9a所示对话框中点击Automatic标签,系统显示图9b所示页面。点击“Do All”选项,系统对零件进行修复计算。修复结束后,再查看零件属性,若“Bad Edges”或“Bad Contours”为零,则说明零件已没有错误;若仍不为零,则需修改参数,再次进行修复。不断重复上述操作,直至“Bad Edges”或“Bad Contours”为零为止。
在图9a所示对话框中点击Automatic标签,系统显示图9b所示页面。点击“Do All”选项,系统对零件进行修复计算。修复结束后,再查看零件属性,若“Bad Edges”或“Bad Contours”为零,则说明零件已没有错误;若仍不为零,则需修改参数,再次进行修复。不断重复上述操作,直至“Bad Edges”或“Bad Contours”为零为止。
(3)零件编辑:通常包括形状编辑和位置编辑。形状编辑有零件比例缩放、实体布尔运算等,位置编辑有零件回零、移动、旋转等。
(4)零件切片:在下拉菜单中点击Slicer→选择Slice All或Slice Selected对所有零件或所选零件进行切片,设置切片参数后(如图10所示),点击对话框“OK”选项,系统对零件进行切片,切片结果一般为CLI文件。
注意:如果对多个零件进行切片,在切片前需先选取所有零件,然后对其进行合并,完成合并操作后再进行切片。

图8 Magic RP 6.2用户界面
(a) (b)
图9 零件修复
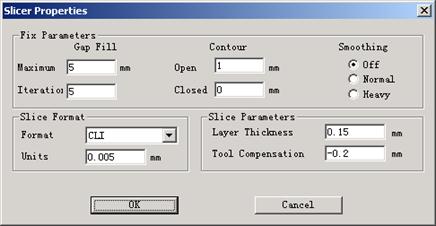
图10 零件切片参数设置
3. 数据校核、输出AFI文件
 运行Arps软件,打开刚生成的CLI文件,系统自动对该文件进行数据校核。调入文件后,在下拉菜单中点击文件(F)→输出AFI文件,设置有关参数(如图11所示),完成AFI的输出。
运行Arps软件,打开刚生成的CLI文件,系统自动对该文件进行数据校核。调入文件后,在下拉菜单中点击文件(F)→输出AFI文件,设置有关参数(如图11所示),完成AFI的输出。
4. 工艺设置、完成原型制作
SLS加工工艺参数包括激光功率、激光束扫描速度、扫描间距、环境温度、层厚、储料桶的粉末预热温度、粉层预热温度、铺粉棍速度等,这些参数应根据成型材料的特性,结合实际加工条件综合考虑。有些参数的设置在零件切片或输出AFI文件时已完成(如层厚、扫描间距等),其余参数一般在工控机上设置。
 当作好有关准备工作后,便可以开始加工:
当作好有关准备工作后,便可以开始加工:
打开AFSWin软件,系统将自动打开激光器、扫描器和冷却器;
将料缸和成型缸的粉料铺平;
检查料缸的余料高度是否超过需料高度;
将激光器的功率调节至20%~25%(需根据具体情况而定);
移动加热器至成型缸上方,按下加热器按钮,开始粉料加热(一般加热温度设置为92℃~96℃);
点击“加工”命令,系统开始加工。
注意:在加工过程中,需根据加工情况对激光器功率和设置温度进行适当的调节。
5.制件后置处理
由于粉末密度较小,烧结好的制件较脆,而且表面不够光滑。为了提高制件强度和表面粗糙度等,一般需进行后处理。后处理包括零件清理(清粉、去除多余结构)、固化处理(浸蜡、涂刷树脂)、烘干、抛光、装配等。
五、实验报告要求
1.写出实验目的、实验设备、实验的步骤。
2.叙述基于SLS技术原型件制作的工艺流程并记录成型工艺参数。
3. 切片的间距的大小对成形件的精度和生产率会产生怎样的影响?
4. 你认为快速原型制造方法的应用前景怎样?
-
技术服务协议书
技术服务协议书甲方家旭牧业有限责任公司乙方石河子市一四二团兽医站甲方因养殖生产需求需要乙方提供兽医技术动物防疫指导咨询培训服务为明…
-
技 术 指 导 协 议
技术指导协议二一三年八月技术指导协议甲方乙方经甲乙双方友好协商乙方愿意选派若干名有能力有经验的焊接和材料专业的技术人员为甲方长期提…
-
技术服务指导协议
枣树冬季修剪管理技术指导合同甲方乙方经甲乙双方协商甲方愿意将自已位于吾塔木乡依格孜吾斯塘村传输局基地以南新315国道以北的150亩…
-
运营技术指导合同书
浦江县小黄坛卫生填埋场项目运营技术指导合同甲方乙方按照合同法中华人民共和国固体废物污染环境防治法的规定经双方协商本着平等互利和诚实…
-
技术指导与业务合作协议书(喜洲卫生院) 3
技术指导与业务合作协议书甲方大理市第二人民医院以下简称甲方乙方大理市喜洲镇卫生院以下简称乙方为提高基层卫生院业务技术水平按大理市卫…
-
初一班主任班级工作总结
班主任工作总结陈涛本学期我担任初一4班的班主任。管理好班级,用爱心培育学生,是我既艰巨又光荣且义不容辞的职责。但是对于我这个初出茅…
-
三月文明礼貌月活动总结
12畜牧班任学兵3月x日,徐主任在班主任例会上对文明礼貌月活动的开展进行了安排,提出了具体的要求。随后我班召开了主题班会和演讲比赛…
-
20xx年综合办公室工作总结
综合办公室是,是承上启下、沟通内外、协调左右、联系四面八方的枢纽,工作也千头万绪,有文书处理、档案管理、文件批转、资产管理、采购管…
-
文播系三月文明礼貌月活动总结11.03.31
“弘扬雷锋精神,创建和谐校园”文明礼貌月活动总结文化传播系团总支二○一一年三月三十一日文化传播系“文明礼貌月”活动总结为贯彻落实教…
-
临床医学-实习总结
实习总结姓名:学号:专业:班级:学校:实习总结实习生活就要结束了,回顾这段时间的点点滴滴,虽然说不上激情澎湃,但是毕竟我们为此付出…