人工智能实验报告1
昆明理工大学信息工程与自动化学院学生实验报告
( 20## —2013 学年第 1 学期)
课程名称:人工智能 开课实验室:信自楼445 20## 年12月 26日

一、上机目的及内容
1.上机内容:
用于预测房价的线性回归(一元或二元的例子)
2.上机目的
(1)掌握线性回归的实质
(2)能够用MATLAB实现线性回归
二、实验原理及基本技术路线图(方框原理图或程序流程图)
(1)建立两个数据包:ex2x.da和ex2y.dat,分别存放住房面积和价格
(2)下载数据,分别付给x和y
(3)定义最大迭代次数,以及学习率,通过梯度下降法,进行迭代
grad = (1/m).* x' * ((x * theta) - y)
theta = theta - alpha .* grad
(4)如果没有得到预期目的,返回(3)
(5)如果得到回归曲线则停止,输出图形,否则返回(3)
三、所用仪器、材料(设备名称、型号、规格等或使用软件),
1台PC及MATLAB软件
四、实验方法、步骤(或:程序代码或操作过程)
% Exercise 2 Linear Regression
% for house
%
% x refers to a house's area
% y is a house's price
%
clear all; close all; clc %清空所有记录和关闭之前打开的所有窗口
x = load('ex2x.dat'); %从ex2x.da这个数据包中下载数据到x
y = load('ex2y.dat'); %从ex2y.dat这个数据包中下载数据在y
m = length(y); % number of training examples
%定义训练的样本(y)的长度或大小
% Plot the training data(开始训练函数)
figure; % open a new figure window(打开一个新的窗口)
plot(x, y, 'o'); %定义输出样本用O表示
ylabel(' price of x*100万 元') %定义y轴的值为住房的房价
xlabel(' area of x*60 square meter ') %定义x轴的值为住房的面积,单位为平方米
% Gradient descent
x = [ones(m, 1) x] % Add a column of ones to x(添加到 x 的那些列:就是将m设为1的那些列)
theta = zeros(size(x(1,:)))'% initialize fitting parameters(对theta进行初始化)
%将x中第一行和所有列初始化
MAX_ITR = 5000; %训练或者是迭代的最大次数为5000次
alpha = 0.07; %定义学习率为0.07
for num_iterations = 1:MAX_ITR %梯度下降发开始,对回归函数开始迭代,从1到1500
% This is a vectorized version of the
% gradient descent update formula
% It's also fine to use the summation formula from the videos
% Here is the gradient
grad = (1/m).* x' * ((x * theta) - y); %梯度下降发函数实现语句
% Here is the actual update
theta = theta - alpha .* grad; %计算theta的值
% Sequential update: The wrong way to do gradient descent
% grad1 = (1/m).* x(:,1)' * ((x * theta) - y);
% theta(1) = theta(1) + alpha*grad1;
% grad2 = (1/m).* x(:,2)' * ((x * theta) - y);
% theta(2) = theta(2) + alpha*grad2;
end
% print theta to screen
theta
% Plot the linear fit
hold on; % keep previous plot visible
plot(x(:,2), x*theta, '-') %寻找一个最低点,并将其输出来
legend('Training data', 'Linear regression')%对数据进行训练
hold off % don't overlay any more plots on this figure
% Closed form solution for reference
% You will learn about this method in future videos
exact_theta = (x' * x)\x' * y %确定theta值
% Predict values for area 120 and 150
predict1 = [80, 120] *theta %预测距离工作地80万,120平米的住房是否符合训练样本的规律
predict2 = [110, 150] * theta %预测距离工作地110万,150平米的住房是否符合训练样本的规律
% Calculate J matrix
% Grid over which we will calculate J
theta0_vals = linspace(-3, 3, 100); %theta0的值为-3到3,并分割为100等分,并将其用等高线输出
theta1_vals = linspace(-1, 1, 100); %theta1的值为-1到1,并分割为100等分
% initialize J_vals to a matrix of 0's
J_vals = zeros(length(theta0_vals), length(theta1_vals))
for i = 1:length(theta0_vals) %开始迭代,i从1到1500
for j = 1:length(theta1_vals) %开始迭代,j从1到1500
t = [theta0_vals(i); theta1_vals(j)];
J_vals(i,j) = (0.5/m) .* (x * t - y)' * (x * t - y);
end
end
% Because of the way house in the surf command, we need to
% transpose J_vals before calling surf, or else the axes will be flipped
J_vals = J_vals'; %将J_vals'矩阵付给J_vals
% Surface plot
figure;
surf(theta0_vals, theta1_vals, J_vals) %利用surf函数求theta0_vals、theta1_vals、 J_vals的值
xlabel('\theta_0'); ylabel('\theta_1'); %x轴表示theta_0,y轴表示theta_1
% Contour plot
figure;
% Plot J_vals as 15 contours spaced logarithmically between 0.01 and 100
contour(theta0_vals, theta1_vals, J_vals, logspace(-2, 2, 15))%输出梯度下降中的最低点,用等高线表示
xlabel('\theta_0'); ylabel('\theta_1'); %x轴表示theta_0,y轴表示theta_1
五、运行截图
图1

图2
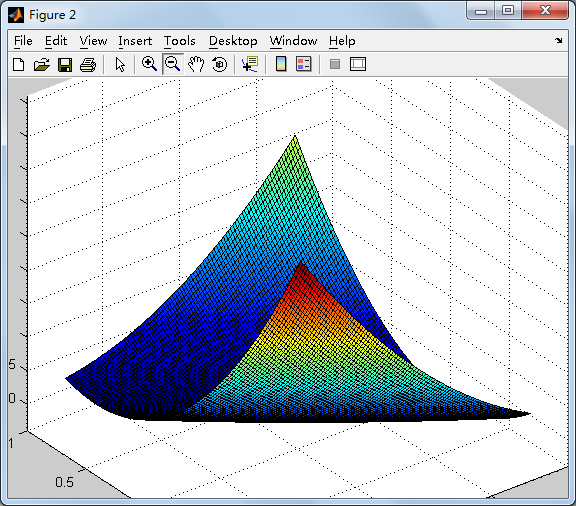
图3

六、实验总结
通过实现掌握和了解了线性回归的基本特性,通过实验编程实现了住房价格和面积之间关系的线性分析。在实验中遇到了很多的问题:一开始的时候对软件不是很熟悉,不知道如何将数据写到数据包中,后来在老师的帮助下,解决了这个问题。数据写到数据包有两种方式:一是在matlab软件中手工输入或随机生成数据,然后用命令程序写到数据包(保存为数据包的形式);而是利用存储技术,也就是利用数据库语言生成数据包;其次遇到的问题是,迭代中出现了了问题,后来发现自己没有初始化学习率;最后的问题是,画不出图像,经过老师的帮助和自己的努力,最后实现了。总之,在这次实验中不但对MATLAB有了进一步的了解和认识,同时也获得了很多宝贵的经验和知识。
第二篇:AI实验报告1
实验一:追逐与拦截
一、实验目的
掌握游戏中追逐与拦截的人工智能算法
二、实验仪器
Visual C++6.0
三、实验原理及过程
四、实验结果
红色的箭头追着蓝色的箭头跑。
五、实验心得(需包括有何不足如何改进)
认识了AI的特点,用Visual C++6.0编写程序时的环境及生成效果。不足就是红色的箭头回跑到的屏幕的外面去。
六、主要代码
#include "main.h"
#include "time.h"
//---------------------------------------------------------------------------
/*
Book: AI for Game Developers
Authors: David M. Bourg & Glenn Seemann
Example: Chasing and evading in continuous environments, Chapter 2
*/
//---------------------------------------------------------------------------
// Global Variables:
int FrameCounter = 0;
RigidBody2D Craft1, Craft2;
Vector Target;
#define _TIMESTEP 0.001
#define _TOL 1e-10
#define _FWDTIME 10
#define _THRUSTFACTOR 3
#define _CHASESETUP true
bool Initialize(void)
{
Craft1.fMass = 10;
Craft1.fInertia = 10;
Craft1.fInertiaInverse = 1/10;
Craft1.vPosition.x = _WINWIDTH-60;
Craft1.vPosition.y = _WINHEIGHT*0.8;
Craft1.fWidth = 10;
Craft1.fLength = 20;
Craft1.fHeight = 5;
Craft1.fOrientation = 135;
Craft1.CD.y = -0.12*Craft1.fLength; Craft1.CD.x = 0.0f; // coordinates of the body center of drag
Craft1.CT.y = -0.50*Craft1.fLength; Craft1.CT.x = 0.0f; // coordinates of the propeller thrust vector
Craft1.CPT.y = 0.5*Craft1.fLength; Craft1.CPT.x = -0.5*Craft1.fWidth; // coordinates of the port bow thruster
Craft1.CST.y = 0.5*Craft1.fLength; Craft1.CST.x = 0.5*Craft1.fWidth; // coordinates of the starboard bow thruster
Craft1.ProjectedArea = (Craft1.fLength + Craft1.fWidth) * Craft1.fHeight;
Craft1.ThrustForce = _THRUSTFORCE*1;
Craft2.fMass = 10;
Craft2.fInertia = 10;
Craft2.fInertiaInverse = 1/10;
if(_CHASESETUP)
{
Craft2.vPosition.x = 40;
Craft2.vPosition.y = _WINHEIGHT*0.8;
} else {
Craft2.vPosition.x = Craft1.vPosition.x - Craft1.fLength*8;
Craft2.vPosition.y = Craft1.vPosition.y - Craft1.fLength*4;
}
Craft2.fWidth = 10;
Craft2.fLength = 20;
Craft2.fHeight = 5;
if(_CHASESETUP)
Craft2.fOrientation = -135;
else
Craft2.fOrientation = 135;
Craft2.CD.y = -0.12*Craft2.fLength; Craft2.CD.x = 0.0f; // coordinates of the body center of drag
Craft2.CT.y = -0.50*Craft2.fLength; Craft2.CT.x = 0.0f; // coordinates of the propeller thrust vector
Craft2.CPT.y = 0.5*Craft2.fLength; Craft2.CPT.x = 0.5*Craft2.fWidth; // coordinates of the port
bow thruster
Craft2.CST.y = 0.5*Craft2.fLength; Craft2.CST.x = -0.5*Craft2.fWidth; starboard bow thruster
Craft2.ProjectedArea = (Craft2.fLength + Craft2.fWidth) * Craft2.fHeight; Craft2.ThrustForce = _THRUSTFORCE*_THRUSTFACTOR;
return true;
}
void UpdateSimulation(void)
{
double dt = _TIMESTEP;
RECT r;
Craft1.SetThrusters(false, false);
if (IsKeyDown(VK_UP))
Craft1.ModulateThrust(true);
if (IsKeyDown(VK_DOWN))
Craft1.ModulateThrust(false);
if (IsKeyDown(VK_RIGHT))
Craft1.SetThrusters(true, false);
if (IsKeyDown(VK_LEFT))
Craft1.SetThrusters(false, true);
// Do craft 2 AI
Craft2.Fa.x = 0;
Craft2.Fa.y = 0;
Craft2.Pa.x = 0;
Craft2.Pa.y = 0;
if(BasicChase)
{
DoCraft2Chase();
DoCraft2ModulateThrust();
}
if(BasicEvade)
DoCraft2Evade();
if(InterceptChase)
{ // coordinates of the
//DoCraft2Intercept(); //DoCraft2ModulateThrust(); DoCraft2InterceptAlt(); } if(PotentialChase) DoAttractCraft2(); // update the simulation Craft1.UpdateBodyEuler(dt); Craft2.UpdateBodyEuler(dt); if(FrameCounter >= _RENDER_FRAME_COUNT) { // update the display if(!ShowTrails) ClearBackBuffer(); DrawCraft(Craft1, RGB(0,0,255)); DrawCraft(Craft2, RGB(255,0,0)); RECT r; r.left = (int) (Target.x-3); r.top = (int) (Target.y-3); r.right = (int) (Target.x+3); r.bottom = (int) (Target.y+3); DrawEllipse(&r, 1, RGB(0,255,0)); CopyBackBufferToWindow(); FrameCounter = 0; } else FrameCounter++; if(Craft1.vPosition.x > _WINWIDTH) Craft1.vPosition.x = 0; if(Craft1.vPosition.x < 0) Craft1.vPosition.x = _WINWIDTH; if(Craft1.vPosition.y > _WINHEIGHT) Craft1.vPosition.y = 0; if(Craft1.vPosition.y < 0) Craft1.vPosition.y = _WINHEIGHT; if(Craft2.vPosition.x > _WINWIDTH) Craft2.vPosition.x = 0; if(Craft2.vPosition.x < 0) Craft2.vPosition.x = _WINWIDTH;
if(Craft2.vPosition.y > _WINHEIGHT) Craft2.vPosition.y = 0; if(Craft2.vPosition.y < 0) Craft2.vPosition.y = _WINHEIGHT;
}
void DrawCraft(RigidBody2D craft, COLORREF clr) {
Vector vList[5];
double wd, lg;
int i;
Vector v1;
wd = craft.fWidth;
lg = craft.fLength;
vList[0].y = lg/2; vList[0].x = wd/2;
vList[1].y = -lg/2; vList[1].x = wd/2;
vList[2].y = -lg/2; vList[2].x = -wd/2;
vList[3].y = lg/2; vList[3].x = -wd/2;
vList[4].y = lg/2*1.5; vList[4].x = 0;
for(i=0; i<5; i++)
{
v1 = VRotate2D(craft.fOrientation, vList[i]);
vList[i] = v1 + craft.vPosition;
}
DrawLine(vList[0].x, vList[0].y, vList[1].x, vList[1].y, 2, clr); DrawLine(vList[1].x, vList[1].y, vList[2].x, vList[2].y, 2, clr); DrawLine(vList[2].x, vList[2].y, vList[3].x, vList[3].y, 2, clr); DrawLine(vList[3].x, vList[3].y, vList[4].x, vList[4].y, 2, clr); DrawLine(vList[4].x, vList[4].y, vList[0].x, vList[0].y, 2, clr);
if(ShowVectors)
{
Vector v, u;
double f = 5;
// Show velocity vectors in green
DrawLine(craft.vPosition.x, craft.vPosition.y, craft.vPosition.y+craft.vVelocity.y, 3, RGB(0,255,0));
// Show force vectors in black
// thrust vector
v.x = 0;
v.y = craft.ThrustForce*f;
v = VRotate2D(craft.fOrientation, v); craft.vPosition.x+craft.vVelocity.x,
u.x = craft.CT.x;
u.y = craft.CT.y;
u = VRotate2D(craft.fOrientation, u);
DrawLine(craft.vPosition.x+u.x, craft.vPosition.y+u.y, craft.vPosition.x + u.x + v.x, craft.vPosition.y + u.y + v.y, 1, RGB(0,0,0));
// port steering force
v.x = craft.PThrust.x*f;
v.y = craft.PThrust.y*f;
v = VRotate2D(craft.fOrientation, v);
u.x = craft.CPT.x;
u.y = craft.CPT.y;
u = VRotate2D(craft.fOrientation, u);
DrawLine(craft.vPosition.x+u.x, craft.vPosition.y+u.y, craft.vPosition.x + u.x + v.x, craft.vPosition.y + u.y + v.y, 1, RGB(0,0,0));
// stbd steering force
v.x = craft.SThrust.x*f;
v.y = craft.SThrust.y*f;
v = VRotate2D(craft.fOrientation, v);
u.x = craft.CST.x;
u.y = craft.CST.y;
u = VRotate2D(craft.fOrientation, u);
DrawLine(craft.vPosition.x+u.x, craft.vPosition.y+u.y, craft.vPosition.x + u.x + v.x, craft.vPosition.y + u.y + v.y, 1, RGB(0,0,0));
// applied force
v.x = craft.Fa.x*f;
v.y = craft.Fa.y*f;
v = VRotate2D(craft.fOrientation, v);
u.x = craft.Pa.x;
u.y = craft.Pa.y;
u = VRotate2D(craft.fOrientation, u);
DrawLine(craft.vPosition.x+u.x, craft.vPosition.y+u.y, craft.vPosition.x + u.x + v.x, craft.vPosition.y + u.y + v.y, 1, RGB(0,0,0));
}
}
void DoCraft2Chase(void)
{
Vector u, v;
bool p = false;
bool s = false;
u = VRotate2D(-Craft2.fOrientation, (Craft1.vPosition - Craft2.vPosition)); u.Normalize();
Target = Craft1.vPosition;
if(u.x < -_TOL)
p = true;
else if(u.x > _TOL)
s = true;
Craft2.SetThrusters(p,s);
}
void DoCraft2Evade(void)
{
Vector u, v;
bool p = false;
bool s = false;
u = VRotate2D(-Craft2.fOrientation, (Craft1.vPosition - Craft2.vPosition)); u.Normalize();
if(u.x > 0)
p = true;
else if(u.x < 0)
s = true;
Craft2.SetThrusters(p,s);
Target = Craft2.vPosition;
}
void DoCraft2Intercept(void)
{
Vector u1, u2, u;
Vector s1, s2;
Vector Vr;
double t1, t2;
Vector s1unit, s2unit;
bool p = false;
bool s = false;
Vr = Craft1.vVelocity - Craft2.vVelocity;
s2 = GetVelocityIntersection() - Craft2.vPosition;
s2unit = s2;
s2unit.Normalize();
u2 = VRotate2D(-Craft2.fOrientation, s2); t2 = s2.Magnitude()/(Vr * s2unit);
s1 = Craft1.vPosition - Craft2.vPosition; s1unit = s1;
s1unit.Normalize();
u1 = VRotate2D(-Craft2.fOrientation, s1); t1 = s1.Magnitude()/(Vr * s1unit);
if(t1 < 0.0)
{
u = u2;
Target = s2 + Craft2.vPosition; } else if(t2 < 0.0) {
u = u1;
Target = s1 + Craft2.vPosition; } else if(t2 < t1)
{
u = u2;
Target = s2 + Craft2.vPosition; } else {
u = u1;
Target = s1 + Craft2.vPosition; }
u.Normalize();
if(u.x < -_TOL)
p = true;
else if(u.x > _TOL)
s = true;
Craft2.SetThrusters(p,s);
}
void DoCraft2InterceptAlt(void)
{
Vector u;
Vector s1, s2, s12;
bool p = false;
bool s = false;
double tClose;
Vector Vr12;
double vr;
// turn around if we get ahead of the prey...
s12 = Craft1.vPosition - Craft2.vPosition;
u = VRotate2D(-Craft2.fOrientation, s12);
if(u.y < -_TOL)
{
//if(GetRandomNumber(0, 10, true) < 5)
p = true;
//else
// s = true;
Craft2.SetThrusters(p,s);
Target = Craft2.vPosition;
return;
}
Vr12 = Craft1.vVelocity-Craft2.vVelocity; // closing velocity s12 = Craft1.vPosition - Craft2.vPosition; // range to close tClose = s12.Magnitude() / Vr12.Magnitude(); // time to close
s1 = Craft1.vPosition + (Craft1.vVelocity * tClose); Target = s1;
s2 = s1 - Craft2.vPosition;
u = VRotate2D(-Craft2.fOrientation, s2);
u.Normalize();
if(u.x < -_TOL)
p = true;
else if(u.x > _TOL)
s = true;
Craft2.SetThrusters(p,s);
}
void DoAttractCraft2(void)
{
// Apply Lenard-Jones potential force to Craft2
Vector r = Craft2.vPosition - Craft1.vPosition; Vector u = r;
u.Normalize();
double U, A, B, n, m, d;
A = 2000;
B = 4000;
n = 2;
m = 3;
d = r.Magnitude()/Craft2.fLength;
U = -A/pow(d, n) + B/pow(d, m);
Craft2.Fa = VRotate2D( -Craft2.fOrientation, U * u);
Craft2.Pa.x = 0;
Craft2.Pa.y = Craft2.fLength / 2;
Target = Craft1.vPosition;
}
Vector GetVelocityIntersection(void)
{
double s, t, num, denom;
Vector a,b,c,d;
a = Craft1.vPosition;
b = a+Craft1.vVelocity;
c = Craft2.vPosition;
d = c+Craft2.vVelocity;
denom = a.x * (d.y-c.y) +
b.x * (c.y-d.y) +
d.x * (b.y-a.y) +
c.x * (a.y-b.y);
if(denom == 0)
return Vector(a.x, a.y, 0);
num = a.x * (d.y-c.y) +
c.x * (a.y-d.y) +
d.x * (c.y-a.y);
s = num/denom;
num = -( a.x * (c.y-b.y) +
b.x * (a.y-c.y) +
c.x * (b.y-a.y) );
t = num/denom;
if( (s >= 0) && (t >= 0) )
return Vector(a.x+s*(b.x-a.x), a.y+s*(b.y-a.y),0); else
return Vector(a.x, a.y, 0);
}
int GetRandomNumber(int min, int max, bool seed)
{
int number;
if(seed)
srand( (unsigned)time( NULL ) );
number = (((abs(rand())%(max-min+1))+min));
if(number>max)
number = max;
if(number<min)
number = min;
return number;
}
void DoCraft2ModulateThrust(void)
{
Vector r = Craft1.vPosition - Craft2.vPosition;
double dmax = Craft2.fLength * 10;
if((Craft2.PThrust.Magnitude() > 0) || (Craft2.SThrust.Magnitude() > 0)) // turning {
if(r.Magnitude() > dmax)
Craft2.ThrustForce = _MAXTHRUST;
else
Craft2.ThrustForce = r.Magnitude() / dmax * _MAXTHRUST; } else {
// todo: check how close we are to target and adjust speed to stay with it Craft2.ThrustForce = _MAXTHRUST;
}
}
-
人工智能实验报告
人工智能九宫格重移搜索成员赵春杰20xx210665羊森20xx210653黄鑫20xx210周成兵20xx210664王素娟20…
-
人工智能试验报告汇总
人工智能课程实验指导书实验内容实验一产生式系统实验实验二移动机器人的路径规划与行为决策实验实验三梵塔问题实验实验四A算法实验实验五…
-
人工智能实验报告
华北电力大学实验报告实验名称课程名称人工智能及应用专业班级学生姓名号成绩指导教师李继荣实验日期20xx5学华北电力大学实验报告华北…
-
人工智能实验报告
人工智能第二次实验报告一实验题目遗传算法的设计与实现二实验目的通过人工智能课程的学习熟悉遗传算法的简单应用三实验内容用遗传算法求解…
-
人工智能实验报告
人工智能技术实验报告实验名称人工智能实验1姓名班级指导教师完成时间20xx04301读程序指出运行结果domainsssymbol…
-
C语言解八数码问题之人工智能实验报告
人工智能导论上机实验指导书基于人工智能的状态空间搜索策略研究八数码问题求解一实验软件TC20或VC60编程语言或其它编程语言二实验…
-
人工智能实验报告
人工智能九宫格重移搜索成员赵春杰20xx210665羊森20xx210653黄鑫20xx210周成兵20xx210664王素娟20…
-
人工智能试验报告汇总
人工智能课程实验指导书实验内容实验一产生式系统实验实验二移动机器人的路径规划与行为决策实验实验三梵塔问题实验实验四A算法实验实验五…
-
人工智能实验报告
华北电力大学实验报告实验名称课程名称人工智能及应用专业班级学生姓名号成绩指导教师李继荣实验日期20xx5学华北电力大学实验报告华北…
-
人工智能实验报告
人工智能第二次实验报告一实验题目遗传算法的设计与实现二实验目的通过人工智能课程的学习熟悉遗传算法的简单应用三实验内容用遗传算法求解…