机械原理实验报告
机械原理实验报告
兰州交通大学机电工程学院
机械设计教研室
20##年9月
实验一 机构运动简图测绘实验报告
姓名: 班级:
成绩: 实验日期: 教师签字:
一、机构示意图
1. 机构名称:
机构自由度:(n= , PL= , PH= )
F=
机构示意图:
2. 机构名称:
机构自由度:(n= , PL= , PH= )
F=
机构示意图:
3. 机构名称:
机构自由度:(n= , PL= , PH= )
F=
机构示意图:
二、机构运动简图
1.机构名称:
机构自由度:(n= , PL= , PH= )
F=
比例尺 µL= (m/mm)
实测尺寸:(单位:mm)
机构运动简图:
2.机构名称:
机构自由度:(n= , PL= , PH= )
F=
比例尺 µL= (m/mm)
实测尺寸:(单位:mm)
机构运动简图:
三、思考题:
1.机构运动简图应包括哪些内容?
2.在绘制机构运动简图时,应标注哪些尺寸?
四、机构草图:
实验二 机构演示实验报告
姓名: 班级:
成绩: 实验日期: 教师签字:
一、演示实验包括那几部分主要内容:
二、问答题:
1.四杆机构中曲柄存在的条件是什么?
2..什么是机器?什么是机构?两者有何区别?
3.何为行星轮系?何为差动轮系?
三、在展示板中选取四个机构,绘出其结构简图:
1. 机构名称: 2. 机构名称:
结构简图: 结构简图:
3.机构名称: 4. 机构名称:
结构简图: 结构简图:
实验三 平面机构组装及运动参数测定实验报告
姓名: 班级:
成绩: 实验日期: 教师签字:
一、 绘制所测试的两个机构的机构运动简图
二、 实测曲线
1.对心式曲柄滑块机构:
2.偏心式曲柄滑块机构:
三、根据两种机构中滑块的位移、速度、加速度的实际变化情况,分析两种机构中滑块的运动规律及特点(有无急回特性、有无冲击)。
四、根据实测曲线大致判断机构中执行构件的运动是否失真?尝试分析是何种原因导致其运动失真(可从安装精度、润滑、测试系统精度等角度进行分析)?
实验四 铰链四杆机构特性实验报告
姓名: 班级:
成绩: 实验日期: 教师签字:
1.第一组杆长数据:

2.第一组杆长条件:
最短杆长度 +最长杆长度 = (mm)
其他两杆长度之和 + = (mm)
最短杆与最长杆长度之和 其他两杆长度之和。
3. 最短杆的邻杆4作机架时,机构运动简图(比例尺μL= m/mm)
最短杆1作 动 另一连架杆3作 动
(填写转动情况并标在图上)
4. 最短杆的另一邻杆2作机架时 机构运动简图(比例尺μL= m/mm)
最短杆1作 动 另一连架杆3作 动
(填写转动情况并标在图上)
5.最短杆1作机架时 机构运动简图(比例尺μL= m/mm)
连架杆2作 动 另一连架杆4作 动
(填写转动情况并标在图上)
6.不与最短杆相邻的杆3作机架时 机构运动简图(比例尺μL= m/mm)
连架杆2作 动 另一连架杆4作 动
(填写转动情况并标在图上)
7.该铰链四杆机构当最短杆AB的角位置ψ= 时,杆BC和杆CD的夹角β达到最小值;当ψ= 时,夹角β达到最大值。
机构运动简图:(两位置用不同得线条绘在一幅图中,标出βmax,βmin), (比例尺μL= m/mm)。
8.该铰链四杆机构当连架杆CD转动到一个极限位置时,杆BC和最短杆AB之间的夹角为 ,当杆CD转动到另一个极限位置时,杆BC和杆AB之间的夹角为 。设分别对应于杆CD逆、顺时针行程的杆AB转角α1和α2,α1 180º,α2 180º。
机构运动简图(两位置用不同得线条绘在一幅图中,标出βmax,βmin), (比例尺μL= m/mm)。
9.第二组杆长数据:

第二组杆长条件:最长杆长度 其他三杆长度之和。
最短杆长度 +最长杆长度 = (mm)
其他两杆长度之和 + = (mm)
最短杆与最长杆长度之和 其他两杆长度之和。
闭链简图(比例尺μL= m/mm)
实验五 机械原理创意设计组装实验报告
姓名: 班级:
成绩: 实验日期: 教师签字:
一、机构运动简图(要求符号规范并标注参数)
二、机构照片(复印件)
三、机构有 各活动构件。有 各低副,其中转动副 个,移动
副 个。有 个复合铰接,在 处。有 个虚约束,在 处。
四、机构自由度数目为F=3n - 2PL- PH
=
五、机构有 个原动件。
在 处用 驱动,在 处用 驱动。
六、针对原设计要求,按照实验结果简述机构的有关杆件是否运动到位、曲柄是否存在、是否实现急回、最小传动角数值、是否有憋劲现象。(原无要求的项目可以不涉及)
七、指出在机构中自己有所创新之处。
八、指出机构的不足之处,简述进一步改进的设想。
第二篇:机械原理实验三实验四指导及实验报告
实验三:刚性转子动平衡实验
一、实验目的
1、加深对刚性转子动平衡概念的理解;
2、掌握刚性转子动平衡实验的原理及基本方法。
3、了解动平衡试验机的结构组成及工作原理。
二、实验设备
1、JPH-A型动平衡实验台;
2、转子试件;
3、平衡块;
4、百分表0~10mm。
三、实验原理
由《机械原理》所述的回转体动平衡原理知:一个动不平衡的刚性回转体绕其回转轴线转动时,该构件上所有的不平衡质量 所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量
所产生的离心惯力总可以转化为任选的两个垂直于回转轴线的平面内的两个当量不平衡质量 和
和 (它们的质心位置分别为
(它们的质心位置分别为 和
和 ,半径大小可根据数值、的不同而不同)所产生的离心力。动平衡的任务就是在这两个任选的平面(称为平衡基面Ⅰ、Ⅱ)内的适当位置(
,半径大小可根据数值、的不同而不同)所产生的离心力。动平衡的任务就是在这两个任选的平面(称为平衡基面Ⅰ、Ⅱ)内的适当位置( 和
和 )加上两个适当大小的平衡重
)加上两个适当大小的平衡重 和
和 ,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:
,使它们产生的平衡力与当量不平衡重产生的不平衡力大小相等,而方向相反,即:


半径 越大,则所需的平衡重
越大,则所需的平衡重 就越小。此时,Σ
就越小。此时,Σ =0且Σ
=0且Σ =0,该回转体达到动平衡。
=0,该回转体达到动平衡。
转子不平衡质量的分布有很大的随机性,而无法直接判断其大小和方位。因此很难用公式来计算平衡重,但可用实验方法来解决。
“刚性转子动平衡实验”是利用实验用动平衡实验台测定需加于两个平衡基面上的平衡质量的大小和方位,并通过增减配重质量来进行校正,直到达到平衡。
四、实验方法和步骤
1、将平衡试件装到摆架的滚轮上,把试件右端的联轴器盘与差速器轴端的联轴器盘,用弹性柱销柔性联成一体。装上传动皮带。
2、用手转动试件和摇动蜗杆上的手柄,检查动平衡机各部分转动是否正常。松开摆架最右端的两对锁紧螺母,调节摆架上面的安放在支承杆上的百分表,使之与摆架有一定的接触,并随时注意振幅大小。
3、开机前将试件右端圆盘上装上适当的待平衡质量(四块平衡块),接上电源启动电机,待摆架振动稳定后,调整好百分表的位置并记录下振幅大小y0(格),百分表的位置以后不要再变动,停机。
4、在补偿盘的槽内距轴心最远处加上一个适当的平衡质量(二块平衡块)。开机后摇动手柄观察百分表振幅变化,手柄摇到振幅最小时手柄停止摇动。记录下振幅大小y1和蜗轮位置角β1(差速器外壳上有刻度指示),停机。(摇动手柄要讲究方法:蜗杆安装在机架上,蜗轮安装在摆架上两者之间有很大的间隙。蜗杆转动到适当位置可与蜗杆不接触,这样才能使摆架自由地振动,这时观察的振幅才是正确的。摇动手柄蜗杆接触蜗轮使蜗轮转动,这时摆动振动受阻,反摇手柄使蜗杆脱离与蜗轮接触,使摆架自由地振动,再观察振幅。这样间歇性地使蜗轮向前转动位和观察振幅变化,最终找到振幅最小值的位置)。在不改变蜗轮位置情况下,停机后,按试件转动方向用手转动试件使补偿盘上的平衡块转到最高位置。取下平衡块安装到试件的平衡面(圆盘2)中相应的最高位置槽内。
5、在补偿盘内再加一点平衡量(1~2平衡块)。按上述方法再进行一次测试。测得的振幅y2蜗轮位置β2,若y2<y1<y0;β1与β2相同或略有改变,则表示实验进行正确。若y2已很小可视为已达到平衡。停机、按步骤4方法将补偿盘上的平衡块移到试件圆盘2上。解开联轴器开机让试件自由转动若振幅依然很小则第一步平衡工作结束。若还存在一些振幅,可适当地调节一下平衡块的相位,即在圆周方向左右移动一个平衡块进行微调相位和大小。
6、将试件两端180°对调,即这时圆盘2为驱动盘,圆盘1为平衡面。再按上述方法找出圆盘1上应加的平衡量。这样就完成了试件的全部平衡工作。
五、注意事项:
1、动平衡的关键是找准相位,第一次就要把相位找准,当试件接近平衡时相位就不灵敏了。所以β1、β2是主要位置角。
2、若试件振动不明显可人为地加一些不平衡块。
六、实验思考题
1、何为动平衡?哪些机构需要动平衡?
2、在补偿盘上所加的平衡质量所处位置应与试件待平衡面上不平衡质量间所成角度为多少?
3、动平衡实验台是如何实现补偿盘与试件平面转向相反、转速相同的?
4、在实验台补偿盘上加平衡块后是否实现了试件的平衡?
5、刚性转子的平衡有几种类型?刚性转子平衡的计算方法是什么?
实验三:刚性回转件的动平衡实验报告
专业班级: 姓名: 学号: 日期:
指导教师: 成绩: 同组人:
一、实验目的
1、加深对刚性转子动平衡概念的理解;
2、掌握刚性转子动平衡实验的原理及基本方法。
3、了解动平衡试验机的结构组成及工作原理。
二、实验设备及用具
1、JPH-A型动平衡实验台;
2、转子试件;
3、平衡块;
4、百分表0~10mm。
三、实验原理
“刚性转子动平衡实验”是利用实验用动平衡实验台测定需加于两个平衡基面上的平衡质量的大小和方位,并通过增减配重质量来进行校正,直到达到平衡。
四、实验方法和步骤
1、将平衡试件装到摆架的滚轮上,把试件右端的联轴器盘与差速器轴端的联轴器盘,用弹性柱销柔性联成一体。装上传动皮带。
2、用手转动试件和摇动蜗杆上的手柄,检查动平衡机各部分转动是否正常。
3、开机前将试件右端圆盘上装上适当的待平衡质量(四块平衡块),接上电源启动电机,待摆架振动稳定后,调整好百分表的位置并记录下振幅大小y0(格),百分表的位置以后不要再变动,停机。
4、在补偿盘的槽内距轴心最远处加上一个适当的平衡质量(二块平衡块)。
5、在补偿盘内再加一点平衡量(1~2平衡块)。
6、将试件两端180°对调再按上述方法找出圆盘1上应加的平衡量。
五、实验数据记录表

六、思考题
1、何为动平衡?哪些机构需要动平衡?
(答: )需要在两个平面加平衡重进行平衡,即满足∑F=0,∑M=0;使转子所产生的不平衡的惯性力与惯性力偶矩得以平衡称动平衡。
对于筒形转子(轴向尺寸较大,径宽比d/b<5,如车轮、电机转子、机床主轴、高速刀具等),其质量的分布在垂直于轴线的多个互相平行的回转面内时,转动时所产生的离心力系不再是平面汇交力系,而是空间力系,由此还产生惯性力偶矩,因此需作动平衡。
2、在补偿盘上所加的平衡质量所处位置应与试件待平衡面上不平衡质量间所成角度为多少?(答:180°)
3、动平衡实验台是如何实现补偿盘与试件平面转向相反、转速相同的?(答:利用差速器实现,差速器是由齿数和模数相同的三个圆锥齿轮和一个外壳为蜗轮的转臂组成的周转轮系,当不转动蜗轮时,差速器为定轴轮系,即可实现补偿盘与试件平面转向相反、转速相同)
4、在实验台补偿盘上加平衡块后是否实现了试件的平衡?
(答:在实验台补偿盘上加平衡块后只实现的摆架的平衡,摆架平衡不等于试件平衡,还必须把补偿盘上的平衡质量转换到试件的平衡面上。)
实验四:机构创意组合实验
一、实验目的
1、分析机构的组成(确定构件数、运动副数及类型,计算机构自由度,明确机构具有确定运动的条件)
2、分析与论证构件运动尺寸对机构运动规律的影响。
3、研究机构的组成原理(杆组法)。
4、掌握机构的组合方法(串联、并联组合等)。
5、训练实际动手组装和分析研究机构运动原理与组合原理的方法。
二、实验设备和仪器
机构传动方案创新组合设计箱
三、实验内容:
1、组装一个摆动导杆机构,通过实验分析摆角的大小与曲柄尺寸的关系以及急回运动的特性。
2、在摆动导杆的基础上串联一个二级杆组形成一个六杆机构,并分析其组成原理。
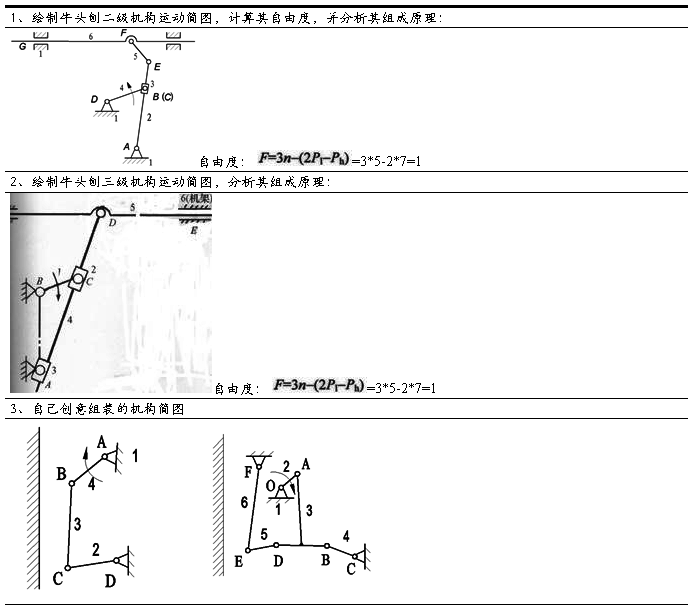
3、在六杆机构的基础上再并联一个棘轮螺旋机构,形成一个牛头刨机构,并分析其组成原理。
4、在二级牛头刨基础上再演化成三级牛头刨机构,并分析其组成原理。
5、利用各种构件与运动副自行组装一个具有实用价值的组合机构,绘制其机构运动简图,并分析其组成原理。
四、实验报告样式:
实验四:机构创意组合实验报告
专业班级: 姓名: 学号: 日期:
指导教师: 成绩:
一、实验目的
1、分析机构的组成(确定构件数、运动副数及类型,计算机构自由度,明确机构具有确定运动的条件)
2、分析与论证构件运动尺寸对机构运动规律的影响。
3、研究机构的组成原理(杆组法)。
4、掌握机构的组合方法(串联、并联组合等)。
5、训练实际动手组装和分析研究机构运动原理与组合原理的方法。
二、实验设备和仪器
机构传动方案创新组合设计箱
三、实验内容:
1、组装一个摆动导杆机构,通过实验分析摆角的大小与曲柄尺寸的关系以及急回运动的特性。
2、在摆动导杆的基础上串联一个二级杆组形成一个六杆机构,并分析其组成原理。
3、在六杆机构的基础上再并联一个棘轮螺旋机构,形成一个牛头刨机构,并分析其组成原理。
4、在二级牛头刨基础上再演化成三级牛头刨机构,并分析其组成原理。
5、利用各种构件与运动副自行组装一个具有实用价值的组合机构,绘制其机构运动简图,并分析其组成原理。
四、实验结果记录及数据处理表
思考题:
1、机构的组合按结构组合形式有哪几种类型?
答:平面机构的结构组合形式——根据组成机构杆组的最高级别划分为:
Ⅱ级机构——所含杆组的最高级别为Ⅱ级。
Ⅲ级机构——所含杆组的最高级别为Ⅱ级。
Ⅰ级机构——只由机架和原动件而构成的机构(如杠杆机构、斜面机构)
2、平面机构的组成原理
平面机构的组合——任何机构都可以看作是由若干个基本杆组依次联接于原动件。
注:牛头刨床机构的组成原理要求大家自己独立完成!
-
机械原理课程设计报告
青岛理工大学琴岛学院课程设计报告课题名称机械原理课程设计学院机电工程系专业班级机械设计制造及其自动化学号20xx020xx12学生…
-
机械原理实验报告大全
机械原理实验项目机械原理课程实验一机械传动性能测试实验一实验目的1通过测试常见机械传动装置如带传动链传动齿轮传动蜗杆传动等在传递运…
-
机械原理实验报告
重庆科技学院学生实验报告1234重庆科技学院学生实验报告234重庆科技学院学生实验报告123重庆科技学院学生实验报告123重庆科技…
-
机械原理实验报告一
河南农业大学机电工程学院指导教师专业班级姓名学号机械原理实验报告一1机构认识实验指导书一实验目的和任务1实验目的1初步了解机械原理…
-
机械原理实验报告
机械原理实验报告姓名班级学号日期现代机械设计教研室河南机电高等专科学校1机构现场认识实验报告一平面连杆机构1根据机构中移动副数目的…
-
机械原理课程设计报告
青岛理工大学琴岛学院课程设计报告课题名称机械原理课程设计学院机电工程系专业班级机械设计制造及其自动化学号20xx020xx12学生…
-
机械原理实验报告大全
机械原理实验项目机械原理课程实验一机械传动性能测试实验一实验目的1通过测试常见机械传动装置如带传动链传动齿轮传动蜗杆传动等在传递运…
-
机械原理实验报告
重庆科技学院学生实验报告1234重庆科技学院学生实验报告234重庆科技学院学生实验报告123重庆科技学院学生实验报告123重庆科技…
-
机械原理实验三实验四指导及实验报告
实验三刚性转子动平衡实验一实验目的1加深对刚性转子动平衡概念的理解2掌握刚性转子动平衡实验的原理及基本方法3了解动平衡试验机的结构…
-
机械原理实验报告一
河南农业大学机电工程学院指导教师专业班级姓名学号机械原理实验报告一1机构认识实验指导书一实验目的和任务1实验目的1初步了解机械原理…