科学学科分组实验报告风的形成
科学学科分组实验报告单
五年级 年 月 日

《玩转电磁铁》实验报告单
第 组
实验1.电磁铁磁性强弱与线圈匝数有关吗?
保持电池节数等条件不变,改变线圈匝数,观察吸起来的大头针数量有什么不同。

实验结论:线圈匝数 ,吸起来的大头针个数 ,电磁铁的磁性越强。
实验2.电磁铁磁性强弱与电池节数有关吗?
保持线圈匝数等条件不变,改变电池节数,观察吸起来的大头针数量有什么不同。

实验结论:电池节数 ,吸起来的大头针个数 ,电磁铁的磁性越强。
3.总的实验结论:线圈匝数 ,电池节数 ,电磁铁的磁性越强。
第二篇:《科学分析工具MATLAB实验》实验指导书20xx实验报告-哈工大完整版绝对很完整
《科学分析工具MATLAB实验》
实验报告
(18学时系列课程实验)
指导教师:
学 生:
班 级:
学 号:
哈尔滨工业大学机电工程学院 机械制造及自动化系
20##年4月
实验一 最小二乘法数据处理实验
一、实验目的
通过Matlab上机编程,掌握利用Matlab软件进行数据拟合分析及数据可视化方法
二、实验内容
1.有一组风机叶片的耐磨实验数据,如下表所示,其中X为使用时间,单位为小时h,Y为磨失质量,单位为克g。要求:
(1) 编写一个M文件,对该数据进行合理的最小二乘法数据拟合;
(2) 绘出原始数据点和拟合的数据曲线。
表1 风机叶片耐磨实验

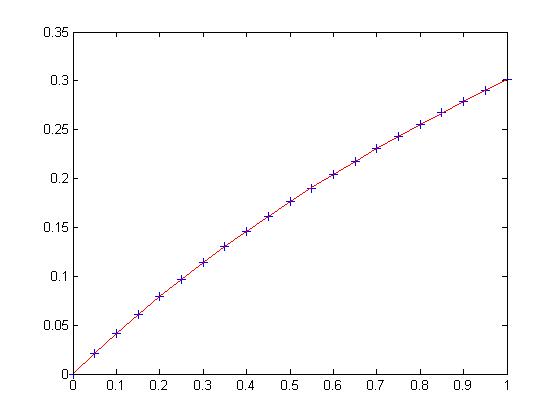
2.对ln(1+x)在[0,1]内的采样数据进行多项式拟合;
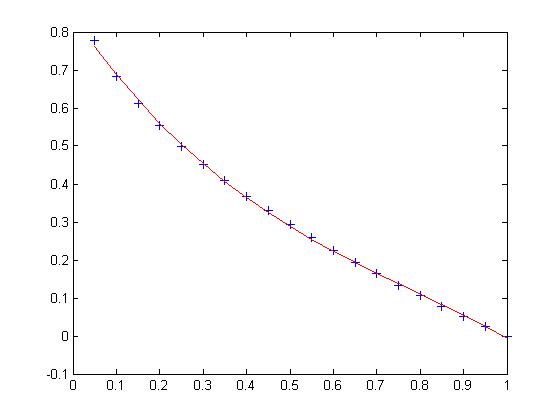
3.对指数函数 在[0,1]内的采样数据进行多项式拟合。
在[0,1]内的采样数据进行多项式拟合。
三、实验报告内容
1)1. clc
clear
xlabel('h')
ylabel('g')
x=10000:1000:23000;
y=[24.0 26.5 29.8 32.4 34.7 37.7 41.1 42.8 44.6 47.3 65.3 87.5 137.8 174.2];
p=polyfit(x,y,4)
y1=polyval(p,x);
plot(x,y,'+',x,y1,'-r')

2
clc
clear
x=0:0.05:1;
y=log10(1+x);
p=polyfit(x,y,3)
y1=polyval(p,x);
plot(x,y,'+',x,y1,'-r')
3
clc
clear
x=0.05:0.05:1;
y=1-sqrt(x);
p=polyfit(x,y,3)
y1=polyval(p,x);
plot(x,y,'+',x,y1,'-r')
实验二 Matlab程序设计实验
一、实验目的
通过Matlab上机编程,掌握利用Matlab软件进行多项式运算、方程求解的方法,掌握命令型M文件和函数型文件的操作方法及这两种M文件的区别与联系。
二、实验内容
一元二次方程的求解问题。对于一元二次方程ax2+bx+c=0,针对用户输入的不同a、b、c的值,求出方程的解情况。要求不用roots命令和solve命令,编程完成一元二次方程 的求解,给出设计的程序源代码,并针对a、b、c的不同取值情况,给出程序的运行结果。
的求解,给出设计的程序源代码,并针对a、b、c的不同取值情况,给出程序的运行结果。
三、实验报告内容
要求编写函数型M文件,输入三个系数,运用判别式法判定根的情形,并输出各种类型的根。
clc
clear
a=input('please input a=');
b=input('please input b=');
c=input('please input c=');
q=b^2-4*a*c;
p=sqrt(b^2-4*a*c);
if q>0
disp( '两个实根')
x1=(-b-p)/(2*a)
x2=(-b+p)/(2*a)
else if q==0
disp( '一个实根')
x=(-b-p)/(2*a)
else
disp('无实根')
x1=(-b-p)/(2*a)
x2=(-b+p)/(2*a)
end
实验三 生产计划调度优化实验
一、实验目的
通过Matlab上机编程,掌握利用Matlab软件进行求解优化问题的方法和常用函数、有约束优化问题。
二、实验内容
某车间有甲、乙、丙三台车床,可用于加工3种工件。这3台机床的可用台时数分别为720h、850h和650h,3种工件的数量分别为340个、550个和420个,已知三种不同机床加工单位数量的不同工件所需的台时数和加工费用如下表所示,问怎样分配机床的加工任务,才能既满足加工工件的要求,又使加工费用最低?
表2 机床加工情况表

三、实验报告内容
1)建立线性规划问题;
2)建立约束条件;
3)编写m文件;
4)给出运行结果。
1)
f= 13x甲1+9x甲2+10x甲3+14x乙1+12x乙2+8x乙3+14x丙1+13x丙2+7x丙3
其中x甲1代表在甲机床上加工1号工件,其余类推。
2)
0.5*x甲1+ 1.1*x乙1+1.0* x丙1<=720
0.5*x乙1+ 1.2*x乙2+1.3* x乙3<=850
0.6*x丙1+ 1.3x丙2+ 0.8*x丙3<=650
x甲1+ x乙1+ x丙1=340
x乙1+ x乙2+ x乙3=550
x丙1+ x丙2+ x丙3=420
3)
clc;
clear;
f = [13;9;10;14;12;8;14;13;7];
A = [0.5 1.1 1.0 0 0 0 0 0 0;0 0 0 0.5 1.2 1.3 0 0 0;0 0 0 0 0 0 0.6 1.2 0.8];
b = [720;850;650];
Aeq=[1 0 0 1 0 0 1 0 0;0 1 0 0 1 0 0 1 0;0 0 1 0 0 1 0 0 1];
beq=[340;550;420];
lb = zeros(9,1);
[x,fval] = linprog(f,A,b,Aeq,beq,lb)
4)x =
230.0000
550.0000
0.0000
54.1355
0.0000
0.0000
55.8645
0.0000
420.0000
fval =
1.2420e+004
所以1号工件在甲机床上加工230件,在乙机床加工54件,丙机床加工56件。2号工件在甲机床上加工550件。3号工件在丙机床上加工420件。总费用为12420。
实验四 运动学分析实验
一、实验目的
通过Matlab上机编程,掌握Matlab语言变量、函数、Matlab常用程序结构和流程控制语句、交互控制语句、程序调试运行等。
二、实验内容
凸轮是把一种运动转化为另一种运动的装置,通常凸轮做旋转运动,并转化为从动件的振动、直线运动或者二者的结合。对基圆为 的凸轮,为最小圆周半径,与凸轮表面相切,并和凸轮的转轴同心。则从动件的运动方程为:
的凸轮,为最小圆周半径,与凸轮表面相切,并和凸轮的转轴同心。则从动件的运动方程为:

对于旋转运动,假定有:






其中, 为从动件的最大位移,
为从动件的最大位移, 为凸轮转角,
为凸轮转角, 为从动件摆角,并且
为从动件摆角,并且 。如果凸轮的角速度
。如果凸轮的角速度 为常量,试求出当=60°时从动件的位移
为常量,试求出当=60°时从动件的位移 、速度
、速度 、加速度
、加速度 、瞬时加速度
、瞬时加速度 的变化曲线。
的变化曲线。
三、实验报告内容
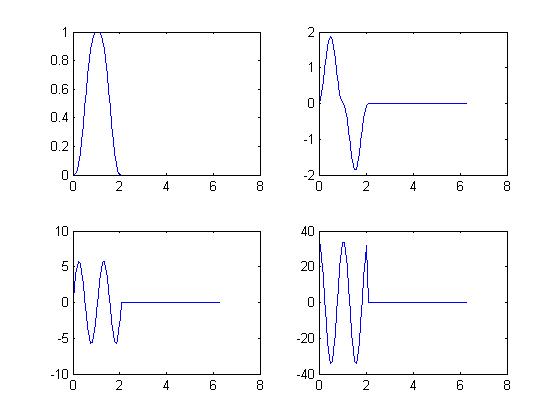
1) 建立M文件,求解从动件的位移、速度、加速度及瞬时加速度;
2) 绘制=60°时从动件的位移、速度、加速度、瞬时加速度的变化曲线。
clc;
clear;
b=pi/3;
x=linspace(0,2*pi)
for k=1:1:100
if x(k)>=0 & x(k)<=b
s(k)=x(k)/b-sin(2*pi*x(k)/b)/(2*pi)
v(k)=(1-cos(2*pi*x(k))/b)/b
a(k)=2*pi*sin(2*pi*x(k)/b)/(b*b)
j(k)=4*pi*pi/b^3*cos(2*pi*x(k)/b)
elseif x(k)>pi/3 & x(k)<2*pi/3
s(k)=2-x(k)/b+sin(2*pi*(x(k)-b)/b)/(2*pi)
v(k)=-(1-cos(2*pi*(x(k)-b))/b)/b
a(k)=2*pi*sin(2*pi*(x(k)-b)/b)/(b*b)
j(k)=4*pi*pi/b^3*cos(2*pi*(x(k)-b)/b)
else
s(k)=0
v(k)=0
a(k)=0
j(k)=0
end
end
subplot(2,2,1)
plot(x,s)
subplot(2,2,2)
plot(x,v)
subplot(2,2,3)
plot(x,a)
subplot(2,2,4)
plot(x,j)
实验五 机电系统仿真实验
一、 实验目的
通过Matlab上机编程,掌握利用SIMULINK进行机电控制系统仿真,包括仿真的基本概念、机电系统建模基础、利用SIMULINK进行机电控制系统仿真的案例分析。
二、实验内容
如下图所示为一标有连接件编号和位置角度的曲柄滑块机构示意图,已知连杆的长度r2=15 mm、r3=55 mm,滑块初始位置r1=70 mm,曲柄初始角度θ2(0)= θ3(0)=0º, 曲柄输入角速度ω2=150 rad/s,试建立系统的运动学模型,并利用SIMULINK进行系统仿真,要求根据输入转速求出滑块的速度和位移曲线。

三、实验报告内容
1) 建立系统的数学模型;
2) 给出利用SIMULINK进行系统仿真的结果。
1)
如图是个只有一个自由度的曲柄滑块机构,其输入为 ,输出分别为
,输出分别为 、
、 、
、 、
、 。设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系,则机构的运动学方程可如下导出:
。设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系,则机构的运动学方程可如下导出:

曲柄滑块机构的闭环位移矢量方程

闭环矢量方程的分解

曲柄滑块机构的运动学方程
对上面的位置方程求时间的导数,即得机构的运动学方程。

2)function out=SpeedEquation(theta2,omega1,theta1)
l1=15;
l2=55;
l0=70;
b=[-l1*omega1*sin(theta1);l1*omega1*cos(theta1)];
A=[l2*sin(theta2) 1;-l2*cos(theta2) 0];
out=A\b;



20##年 补全实验五
补全实验五
-
小学科学实验报告单
小学科学实验报告单2本表每学期按年级每个实验选样例装订成册存档小学科学实验报告单2本表每学期按年级每个实验选样例装订成册存档小学科…
-
小学科学实验报告单样板
小学科学实验报告单小学科学实验报告单小学科学实验报告单小学科学实验报告单小学科学实验报告单小学科学实验报告单小学科学实验报告单小学…
-
小学科学实验报告单
小学科学实验报告单1先凉再温后热依次测量23操作要诀是量液体筒平稳口挨口免外流改滴加至刻度读数时视线平看凹处读得准若不慎加入液体的…
- 小学科学实验报告单表格
-
小学科学三年级上册实验报告单
小学三年级上册科学实验报告单小学三年级上册科学实验报告单小学三年级上册科学实验报告单小学三年级上册科学实验报告单小学三年级上册科学…
-
关于搜索引擎的实验总结报告
本次实验的目的是对常用的网络营销工具,尤其是综合性的搜索引擎的使用进行初步的认识,学习并掌握不同营销工具的使用方法及特点。而我们小…
-
实验报告总结
实验报告书姓名:学号:专业:系部:指导教师:20xx年x月x日一、实验时间:20xx年x月—5月二、实验地点:三、实验目的:1、通…
-
经济管理综合实验总结报告
经济管理系统仿真综合实验个人报告专业年级公司/机构名称云岩区人民政府学生学号、姓名20xx年x月x日经济管理系统仿真综合实验个人报…
-
霍尔效应实验报告(附带实验结论)
《霍尔效应》参考实验报告附带结论实验目的1.了解霍尔效应实验原理。2.测量霍尔电流与霍尔电压之间的关系。3.测量励磁电流与霍尔电压…
-
有关实验报告的书写格式
有关实验报告的书写格式江苏省泗阳县李口中学沈正中一、完整实验报告的书写完整的一份实验报告一般包括以下项目:实验名称:实验目的:实验…