传感器技术实验指导书
实验一 差动式传感器综合性实验
一、实验目的
1、了解差动技术在传感器中的应用
2、掌握最佳线性度的求解方法
二、实验内容
1、观察下列三种差动式传感器的结构:
(1) 差动变压器传感器;
(2) 差动霍尔式传感器;
(3) 差动变面积电容式传感器;
对观察结果进行描述并说明差动工作原理。
2、观察差动螺旋管式电感传感器差动性能;
3、了解差动式传感器的性能特点;
4、任选其中一种传感器进行位移测量实验,指出线性范围。
5、根据线性范围,进行最佳线性度计算,并与最小二乘线性度进行比较。
三、差动螺旋管式电感传感器差动性能演示
差动螺旋管式电感传感器是由两个完全相同的单线圈螺管式自感传感器组成
(1) 所需部件:
利用差动变压器的衔铁和两个次级线圈构成差动螺旋管式电感传感器。演示使用音频振荡器、测量电路电桥、差动放大器、移相器、相敏检波器、低通滤波器、电压表、示波器、测微头等部件。
(2) 演示步骤

<1>按下图接线,将两个次级线圈分别接入示波器的两个通道。
注:此图表明,单线圈的电源电压由初级线圈的电源电压耦合产生
观察两个单线圈螺管式自感传感器的输出端口波形。
两波形是否同相?当衔铁处于中间位置时,两波形的幅值是否相等?
<2>上、下移动衔铁,观察两端口波形的幅值是否发生变化。
<3>将次级线圈接入电桥的相邻两臂(构成差动式传感器,示波器的一个通道显示其输出值)。上、下移动衔铁观察传感器输出,输出值是否在“+”、“0”、“-”之间变化(过零翻转)。
<4>讨论观察结果。
四、实验报告
1、写出综合传感器实验仪上应用差动技术的传感器名称及结构特点,并画出结构示意图。
2、说明上述各种传感器的差动工作原理。
3、根据所选传感器的位移测量实验完成下列内容:
(1) 原始数据记录。
(2) 最小二乘法线性度求解。
(3) 最佳线性度求解。
(4) 二个线性度值的比较分析。
附件一:差动螺旋管式电感传感器位移测量
(1)差动变压器二个次级线圈组成差动状态,音频振荡器LV端做为恒流源供电,差动放大器增益适度。差动变压器的两个线圈和电桥上的两个固定电阻R组成电桥的四臂,电桥的作用是将电感变化转换成电桥电压输出。

图1-1差动螺旋管式电感传感器工作简图
(2)旋动测微头使衔铁在线圈中位置居中,此时Lo′=Lo″,系统输出为零。
(3)当衔铁上、下移动时,Lo′≠Lo″,电桥失衡就有输出,大小与衔铁位移量成比例,相位则与衔铁移动方向有关,衔铁向上移动和向下移动时输出波形相位相差约180°,由于电桥输出是一个调幅波,因此必须经过相敏检波器后才能判断电压极性,以衔铁位置居中为起点,分别向上、向下各位移5mm,记录V,X值,
做出V-X曲线,求出灵敏度。

附件二:差动变压器式传感器的位移测量
一、实验所需部件:
差动变压器、音频振荡器、电桥、差动放大器、移相器、相敏检波器、低通滤波器、电压表、示波表、测微头。

图1-2 差动变压器工作简图
二、实验步骤:
1.按图(1-2)接线,差动放大器增益适度,音频振荡器LV端输出5KHZ,VP-P值2V。
2.调节电桥WD、WA电位器,调节测微头带动衔铁改变其在线圈中的位置,使系统输出为零。
3.旋动测微头使衔铁在线圈中上、下有一个较大的位移,用电压表和示波器观察系统输出是否正负对称(如有削波现象则应减小差动放大器增益)。如不对称则需反复调节衔铁位置和电桥、移相器,做到正负输出对称。
4.旋动测微头,带动衔铁向上5mm,向下5mm位移,每旋一周(0.5mm)记录一电压值并填入表格。

四、注意事项:
系统标定需调节电桥、移相器、衔铁三者位置,正确的调节方法是:在步骤1、2之后用手将衔铁压至线圈最底部,调节移相器,用示波器两个通道观察相敏检波器①、②端口,当两端口波形正好为同相或反相时恢复衔铁位置,这样才能做到系统输出灵敏度最高并正负对称。
附件三:霍尔式传感器位移测量
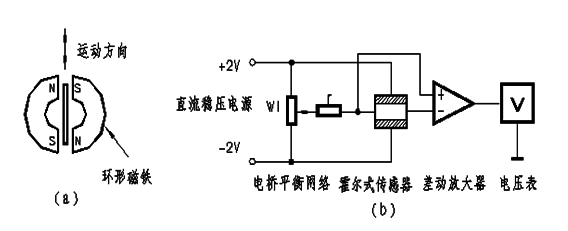
图1-3差动霍尔式传感器工作简图
一、实验原理:
霍尔式传感器是由工作在两个环形磁钢组成的梯度磁场和位于磁场中的霍尔元件组成。当霍尔元件通以恒定电流时,霍尔元件就有电势输出。霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
二、实验所需部件:
直流稳压电源、电桥、霍尔传感器、差动放大器、电压表、测微头。
三、实验步骤:
1.按图(1-3)接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。差动放大器增益适度。开启电源,调节电桥WD,使差放输出为零。上、下移动振动台,使差放正负电压输出对称。
2.上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。并记入下表,作出V-X曲线,求出灵敏度及线性。

五、注意事项:
直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
附件四、变面积电容式传感器位移测量
一、实验原理
电容式传感器有多种形式,本仪器中是差动平行变面积式。传感器由两组定片和一组动片组成。当安装于振动台上的动片上、下改变位置,与两组静片之间的相

图1-4差动变面积电容式传感器的工作简图
对面积发生变化,极间电容也发生相应变化,成为差动电容。如将上层定片与动片形成的电容定为CX1,下层定片与动片形成的电容定为CX2,当将CX1和CX2接入双T型桥路作为相邻两臂时,桥路的输出电压与电容量的变化有关,即与振动台的位移有关。
二、实验所需部件
电容传感器、电容变换器、差动放大器、低通滤波器、低频振荡器、测微头。
三、实验步骤
1.按图(1-4)接线,电容变换器和差动放大器的增益适度。
2.装上测微头,带动振动台位移,使电容动片位于两静片中,此时差动放大器输出应为零。
3.以此为起点,向上和向下位移电容动片,每次0.5mm,直至动片与一组静片全部重合为止。记录数据,并作出V—X曲线,求得灵敏度。

4.低频振荡器输出接“激振I”端,移开测微头,适当调节频率和振幅,使差放输出波形较大但不失真,用示波器观察波形。
五、注意事项
1.电容动片与两定片之间的片间距离须相等,必要时可稍做调整。位移和振动时均应避免擦片现象,否则会造成输出信号突变。
2.如果差动放大器输出端用示波器观察到波形中有杂波,请将电容变换器增益进一步减小。
实验二光电位置敏感器件——PSD传感器
实验原理:
 PSD(position sensitive detector)是一种新型的横向光电效应器件,当入射光点照在器件光敏面上时,激发光生载流子而产生电流I,光生电流的大小与光点的大小无关,只和光点在器件上的位置有关系。当光点位于器件中点(原点)时,光生电流I1=I2,根据这一原理,将PSD器件两极电流I1、I2变换成电压信号后再进行运算即可知道光点的位置。PSD器件工作原理见右图。
PSD(position sensitive detector)是一种新型的横向光电效应器件,当入射光点照在器件光敏面上时,激发光生载流子而产生电流I,光生电流的大小与光点的大小无关,只和光点在器件上的位置有关系。当光点位于器件中点(原点)时,光生电流I1=I2,根据这一原理,将PSD器件两极电流I1、I2变换成电压信号后再进行运算即可知道光点的位置。PSD器件工作原理见右图。
实验所需器件:
PSD器件(已装在基座上)、固体激光器、反射体、PSD处理电路单元、电压表
实验步骤:
1. 通过基座上端圆形观察孔观察PSD器件及在基座上的安装位置,连接好PSD器件与处理电路,开启仪器电源,输出端Vo接电压表,此时因无光源照射,PSD前聚焦透镜也无因光照射而形成的光点照射在PSD器件上,Vo输出的为环境光的噪声电压,试用一块遮光片将观察圆孔盖上,观察光噪声对输出电压的变化。
2. 将激光器插头插入“激光电源”插口,激光器安装在基座圆孔中并固定。注意激光束照射到反射面上时的情况,光束应与反射面垂直。旋转激光器角度,调节激光光点,(必要时也可调节PSD前的透镜)使光点尽可能集中在器件上。
3. 仔细调节位移平台,用电压表观察输出电压VO的变化,当输出为零时,再分别测两路信号电压输出端VO1、VO2的电压值,此时两个信号电压应是基本一致的。
4. 从原点开始,位移平台分别向前和向后位移10mm,因为PSD器件对光点位置的变化非常敏感,故每次螺旋测微仪旋转5格,并将位移值(mm)与输出电压值(V0)记录列表,作出V/X曲线,求出灵敏度S,S=△V/△X。根据曲线分析其线性。

注意事项:
实验中所用的固体激光器光点可调节,实验时请注意光束不要直接照射眼睛,否则有可能对视力造成不可恢复的损伤。每一支激光器的光点和光强都略有差异,所以对同一PSD器件,光源不同时光生电流的大小也是不一样的。实验时背景光的影响也不可忽视,尤其是采用日光灯照明时,或是仪器周围有物体移动造成光线反射发生变化时,都会造成PSD光生电流改变,致使单元V0输出端电压产生跳变,这不是仪器的毛病。如实验时电压信号输出较小,则可调节一下激光器照射角度,使输出达到最大。
实验三 电荷耦合图像传感器---CCD摄像法测径实验
实验原理:
电荷耦合器件(CCD)的重要应用是作为摄像器件,它将二维光学图像信号通过驱动电路转变成一维的视频信号输出。当光学镜头将被摄物体成像在CCD的光敏面上,每一个光敏单元(MOS电容)的电子势阱就会收集根据光照强度而产生的光生电子,每个势阱中收集的电子数与光照强度成正比。在CCD电路时钟脉冲的作用下,势阱中的电荷信号会依次向相邻的单元转移,从而有序地完成载流子的运输—输出,成为视频信号。
用图像采集卡将模拟的视频信号转换成数字信号,在计算机上实时显示,用实验软件对图像进行计算处理,就可获得被测物体的轮廓信息。
实验所需部件:
CCD摄像头、被测目标(圆形测标)、视频线、图像采集卡、实验软件
实验步骤:
1、 根据图像采集卡光盘安装说明在计算机中安装好图像卡。并按要求正确设置。
2、 在被测物前安装好摄像头,连接CCD稳压电源,视频线正确连接图像卡与摄像头。
3、 检查无误后进入测量程序,启动图像采集后,屏幕窗口即显示被测物的图像,适当地调节CCD的镜头前后位置,使目标图像最为清晰。
4、 尺寸标定:先取一标准直径圆形目标(D0=10mm),根据测试程序测定其屏幕图像的直径D1(单位用象素表示),则测量常数K=D1/D0。
5、 保持CCD镜头与位移平台距离不变,更换另一未知直径的圆形目标,利用测试程序测得其在屏幕上的直径,除以系数K,即得该目标的直径。
测量常数K=D1/D2=

思考题:
如何利用此方法测试方形物体的尺寸。
注意事项:
利用图象卡采集,务请正确设置采集参数,详见CCD测试系统软件说明。
第二篇:传感器检测技术实训指导
传感器检测技术
实训指导
前 言
传感器原理检测技术课程,在高等理工科院校电气与自动化专业、电子信息工程和测控技术与仪器类各专业的教学计划中,是一门重要的专业基础课。实验是教学的重要环节之一,通过实验巩固和消化课堂所讲授理论内容,掌握常用传感器的工作原理和使用方法,提高学生的动手能力和学习兴趣。
本实验指导书提供了多个实验,可根据各学院相关专业教学实际,进行选做。该指导书在以往使用的《检测技术实验指导书》基础上,由电气学院赵兰老师、姚志树老师进行了一定的修改和补充。
目 录
实验一 箔式应变片桥路性能比较........... - 2 -
实验二 电容式传感器的特性............... - 4 -
实验三 电涡流式传感器的静态标定......... - 6 -
实验四 电涡流传感器电机转速测量实验..... - 8 -
实验五 霍尔式传感器特性实验............. - 9 -
实验六 霍耳传感器的应用—电子秤........ - 10 -
实验一 箔式应变片桥路性能比较
一、实验目的:
1.观察了解箔式应变片结构及粘贴方式。
2.测试应变梁变形的应变输出。
3.比较各桥路间的输出关系。
二、实验原理:
应变片是最常用的测力传感元件。用应变片测试时,应变片要牢固地粘贴在测试体表面。当测件受力发生形变,应变片的敏感栅随同变形,其电阻值也随之发生相应的变化。通过测量电路,转换成电信号输出显示。
电桥电路是最常用的非电量电测电路中的一种,单臂,半桥,全桥电路的灵敏度依次增大。实际使用的应变电桥的性能和原理如下:

已知单臂、半桥和全桥电路的∑R分别为 、
、 、
、 。电桥灵敏度S=?V / ?X,于是对应于单臂、半桥和全桥的电压灵敏度分别为1/4E、1/2E和E。
。电桥灵敏度S=?V / ?X,于是对应于单臂、半桥和全桥的电压灵敏度分别为1/4E、1/2E和E。
三、实验所需部件:
CSY10 型传感器系统实验仪:
直流稳压电源、差动放大器、电桥、毫伏表、测微头。
直流稳压电源打到0V档,毫伏表打到±50mv档,差动放大器增益旋钮打到最右边。
四、实验步骤:
1.调零。差动放大器增益旋钮置100倍(顺时针方向旋到底),“ 、-”输入端用实验线对地短路,输出端接数字电压表。开启仪器电源,用“调零”电位器调整差动放大器输出电压为零,然后拔掉实验线。调零后在整个测试过程中,调零电位器位置不变。
、-”输入端用实验线对地短路,输出端接数字电压表。开启仪器电源,用“调零”电位器调整差动放大器输出电压为零,然后拔掉实验线。调零后在整个测试过程中,调零电位器位置不变。
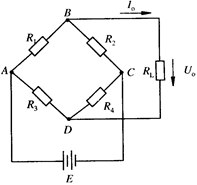
2.按图1-1将实验部件用实验线连接成测试桥路。桥路中R1、R2、R3和WD为电桥中的固定电阻和直流调平衡电位器,R为应变片(可任选上、下梁中的一片作为工作片)。直流激励电源为±4V。
测微头装于悬臂梁前端的永久磁钢上,并调节使应变梁处于基本水平状态。
 图1-1单臂桥路
图1-1单臂桥路
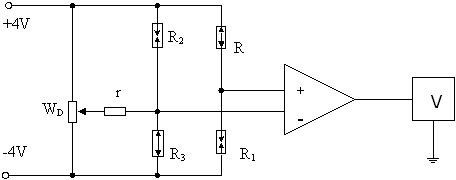
图1-2全桥桥路
3.确认接线无误后开启仪器电源,并预热数分钟。
调整电桥WD电位器,使测试系统输出为零。
4.旋动测微头,带动悬臂梁分别作向上和向下的运动,以悬臂梁水平状态下输出电压为零,开始向上或向下移动做正、反行程测试。测微头每移动0.5mm记录一个差动放大器输出电压值,直至进入非线性区,做相反行程测试,测试数据列表。
单臂电桥正行程(反行程数据列表类似)

根据表中所测数据计算灵敏度S,S=?V / ?X 单位:v/mm。
5.在完成上面测试的基础上,不变动差动放大器增益和调零电位器,图2-1中电桥固定电阻R1、R2、R3分别换成箔式应变片,按图1-2全桥桥路接成全桥测试系统。
6.重复上面的3-4步骤,测出单臂和全桥输出电压并列表,计算灵敏度。S=?V / ?X 单位:v/mm。
全桥正行程(反行程数据列表类似)

7.在同一坐标上做出V-X关系曲线,比较桥路的灵敏度,并做出定性的结论。
实验二 电容式传感器的特性
一、实验目的:
了解电容式传感器的结构和工作原理。
掌握电容式传感器的测量方法。
二、实验原理:
电容式传感器有多种型式,本仪器中是差动变面积式。传感器由两组定片和一组动片组成。当安装于振动台上的动片上、下改变位置,与两组静片之间的重叠面积发生变化,极间电容也发生相应变化,成为差动电容。如将上层定片与动片形成的电容定为Cx1,下层定片与动片形成的电容定为Cx2,当将Cx1和Cx2接入桥路作为相邻两臂时,桥路的输出电压与电容量的变化有关,即与振动台的位移有关。
三、实验所需部件:
CSY10 型传感器系统实验仪:
电容传感器、电容变化器、差动放大器、低通滤波器、低频滤波器、测微头。
四、实验步骤:
(1)按图2-1接线,电容变换器和差动放大器的增益适中。

图2-1 电容传感器测试接线图
(2)装上测微头,带动振动台位移,使电容动片位于两静片中,此时差动放大器输出应为零。
(3)以此为起点,向上或向下旋动测微头开始正反行程测试,测微头每移动0.5mm记录一个输出电压值,直至动片与一组静片全部重合为止。将读数记录入下表:并作出V—X曲线,计算灵敏度,S=?V / ?X 单位:v/mm。

(4)低频振荡器输出接“激振Ⅰ”端,移开测微头,适当调节频率和振幅,使差放输出波形较大但不失真,用示波器观察波形。
五、注意事项:
(1)电容动片与两定片之间的片间距离须相等,必要时可稍微做调整。位移和振动时均不可有擦片现象,否则会造成输出信号突变。
(2)如果差动放大器输出端用示波器观察到波形中有杂波,请将电容变换器增益进一步减小。
实验三 电涡流式传感器的静态标定
一、实验目的:
了解电涡流传感器的结构、原理、工作特性。
掌握电涡流传感器的静态标定方法。
二、实验原理:
电涡流式传感器由平面线圈和金属涡流片组成如图5-1所示,当线圈中通以高频交变电流后,与其平行的金属片上产生电涡流,电涡流的大小影响线圈的阻抗Z,而涡流的大小与金属涡流片的电阻率、导磁率、厚度、温度以及与线圈的距离X有关。当平面线圈、被测体(涡流片)、激励源已确定,并保持环境温度不变,阻抗Z只与X距离有关。将阻抗变化经涡流变换器变换成电压V输出,则输出电压是距离X的单值函数。
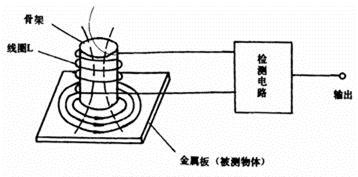
图3-1 涡流式位移传感器的基本结构及工作原理
三、实验所需部件:
CSY10 型传感器系统实验仪:电涡流线圈、金属涡流片、电涡流变换器、测微头、示波器、电压表。
四、实验步骤:
1.安装好电涡流线圈和金属涡流片,注意两者必须保持平行。安装好测微头,将电涡流线圈接入涡流变换器输入端。涡流变换器输出端接电压表20V档。见下图3-2。
2.开启仪器电源,用测微头将电涡流线圈与涡流片分开一定距离,此时输出端电压值输出。用示波器接涡流变换器输入端观察电涡流传感器的高频波形,信号频率约为1MHz。
3.用测微头带动振动平台使平面线圈完全贴紧金属涡流片,此时涡流变换器输出电压为零。涡流变换器中的振荡电路停振。
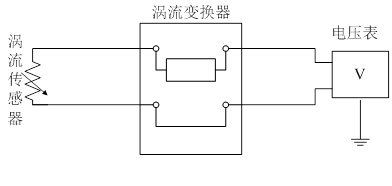
图3-2 涡流式位移传感器测试接线图
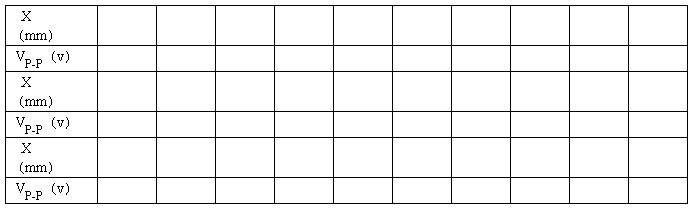
4.旋动测微头使平面线圈离开金属涡流片,测微头每移动0.25mm记录一个输出电压值,将读数记录入下表:并作出V—X曲线,计算灵敏度,S=?V / ?X 单位:v/mm。并用示波器观察变换器的高频振荡器波形。
5.换用不同材质的金属涡流片,重复实验步骤1-- 4。
五、实验报告:
作出不同材质的V-X曲线,铝片,铜片,铁片,求出灵敏度,并进行比较。
六、注意事项:
当涡流变换器接入电涡流线圈处于工作状态时,接入示波器会影响线圈的阻抗,使变换器的输出电压减小。或是使传感器在初始状态有一死区。
实验四 电涡流传感器电机转速测量实验
一、实验目的:
掌握电涡流式传感器的实际应用。
二、实验仪器及设备:
CSY10 型传感器系统实验仪:
(1)电涡流线圈 (2)电涡流变换器
(3)测速电机及转盘 (4)电压/频率表 示波器
三、实验原理:
当平面线圈与金属被测体的相对位置发生周期性变化时,涡流量及线圈的阻抗的变化经涡流变换器转换为周期性的电压信号变化。应用在本实验中表现为:电机每转一圈,转盘上的金属片在平面线圈正下方出现两次,即:电机转速为周期性的电压信号频率的一半 。
四、实验内容:
1.将电涡流线圈安装在电机转盘上方,线圈与转盘平面平行,在不碰檫的情况下相距越近越好。
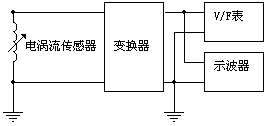
图4-1电涡流式传感器测试接线图
2.按图4-1接线,先打开实验系统和示波器电源,然后打开电机开关,调节电机转速和平面线圈的水平位置,用示波器观察,使变换器输出的波形较为对称。
3.仔细观察示波器中两相邻波形的峰值是否一样,如有差异,则说明线圈与转盘面不平行或是电机有振动现象。利用实验六中铁涡流片的特性曲线判断转盘面与线圈的不平行度。
4.将电压/频率表2kHz档接入涡流变换器输出端,读取脉动波形频率值,并与示波器读取的频率做比较。共取五组不同转速数据,分别求取电机转速值:n = f/2 。
五、实验报告要求:
1. 根据电压/频率表和示波器的读数求取 5 组电机转速。

2.画出从示波器上观察到的一组信号波形(标出信号周期),求取信号频率,计算电机转速。
3.比较以上两种方法求取的电机转速,分析差别原因。
实验五 霍尔式传感器特性实验
一、实验目的:
1. 了解霍尔式传感器的工作原理。
2. 掌握用综合传感器实验仪进行霍尔式传感器特性实验的方法。
二、实验仪器及设备:
CSY10 型传感器系统实验仪:
霍尔片 磁路系统 电桥 差动放大器
V/F 表 直流稳压电源 测微头 低频振荡器 示波器 一台
三、实验原理:
霍尔传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。当霍尔元件通以恒定电流时,霍尔元件就有电势输出。霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势 V 取决于其在磁场中的位移量 X,因此,测得霍尔电势的大小便可获知霍尔元件的静态位移量 X。
四、实验步骤:
1.按图7-1接线:w1,r1为电桥单元中的直流平衡网络。

图5-1 霍尔传感器测试接线图
2.装好测微头;
3.开启电源,差动放大器调零,然后重新接好线路。
4.调整w1使电压表指示为零;
5.向上或向下旋动测微头开始行程测试,测微头每移动0.5mm记录一个输出电压值,将读数记录入下表:并作出V—X曲线,计算灵敏度,S=?V / ?X 单位:v/mm。
6.按下激振器按钮,适当打大振幅,用示波器观察差动放大器的输出波形。分析并解释振幅较大时示波器上的波形?次传感器能适用的最大位移是多少?
五、实验报告要求:
1. 数据处理,作出V—X曲线,求取灵敏度系数S。S=?V / ?X 单位:v/mm。

2.作出振幅取较大值时,示波器上的波形,求取此传感器能适用的最大位移?
实验六 霍耳传感器的应用—电子秤
一、实验目的:
掌握霍耳传感器的实际应用。
二、实验仪器及设备:
CSY10 型传感器系统实验仪:
(1)霍耳式传感器 (2)直流稳压电源
(3)差动放大器 (4)震动圆盘
(5)环形砝码 (6)电桥
(7)电压表 一套
三、实验原理:
称重平台位于传感器实验台内部的悬臂梁顶端的磁钢上。当称重平台上有被称重物时,由于重力作用,悬臂梁发生弹性形变。同时,位于称重平台下部的霍耳传感器被带动而向下移动。由于悬臂梁形变产生的位移大小与重力成正比,因此可以通过测量称重平台的位移变化量 X 来间接测量被测物的重量,从而实现电子测量物体重量的目的。
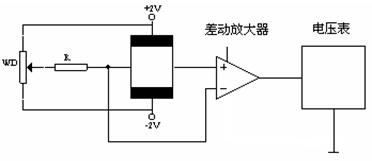
图6-1 霍耳传感器测试接线图
四、实验内容:
1.移开测微头,加上震动圆盘。按图6-1连接好系统。
2.差动放大器增益旋扭调至最大,对差动放大器调零。
3.调节电桥WD使输出为零。
4.以振动平台为称重平台,逐步放上砝码,依次记下电压表读数,填入表1。
5.移走称重砝码,在称重平台上分别放置三个不同重量的物品W1、W2、W3(重量未知),分别读出对应的电压表读数,将读数填入表2。
6.从三个物品中取出以下组合:W1+W2,W1+W3,W2+W3,W1+W2+W3。分别放在称重平台上进行称量并记录电压表读数,将读数填如表2
五、注意事项:
霍耳式传感器在做称重时只能工作在梯度磁场中,所以砝码和被称重物都不能太重。实验时,环形砝码应置于平台的中间部位,避免平台倾斜。
六、实验报告要求:
1.实验数据整理。
2.根据实验数据作出V—W曲线。
3.根据V—W曲线,求取W1、W2、W3、W1+W2、W1+W3、W2+W3、W1+W2+W3的重量。
4.分别将求取的W1、W2、W3的重量组合相加与求取的W1+W2、W1+W3、W2+W3、W1+W2+W3的重量进行比较,分析误差原因。
表1

表2

-
传感器与检测技术实验报告
准考证号100214101370姓名倪帅彪院校河南科技大学专业名称080302机械制造及自动化独立本科段传感器与检测技术实验报告实…
-
南昌大学传感器与检测技术实验报告上交版
传感器与检测技术实验报告班级学号姓名时间年月实验一差动变压器的应用电子秤一实验目的了解差动变压器的实际应用二所需单元及部件音频振荡…
-
南昌大学传感器与检测技术实验报告
实验报告实验课程:传感器与检测技术学生姓名:苏**学号:***00专业班级:自动化114班20XX年6月5日目录实验一差动变压器的…
-
传感器与检测技术综合实训报告书
辽东学院课程设计报告书传感器与检测技术综合课程设计成绩课程设计报告书所属课程名称传感器与检测技术综合课程设计题目电子称硬件电路设计…
-
传感技术实验报告
传感实验指导书及实验报告实验一项目名称金属箔式应变片单臂电桥性能实验一实验目的了解金属箔式应变片的应变效应单臂电桥工作原理和性能二…
-
20xx年市场管理工作总结
**20xx年度市场管理工作总结**办事处是20xx年元月市、区政府批准设立的新单位,辖涉及原**镇2个村、**乡8个村,共10个…
-
第四学期总结完全版
第四学期总结齐齐姓名:班级:学号:指导教师:尔工程学哈院第四学期总结第四学期已经结束,我的工作也告一段落,在这一个月里,我经过自身…
-
医生进修总结
光阴似箭,一年的进修生涯转瞬已逝,我于20xx年x月至20xx年x月在中南大学湘雅二医院妇产科的进修生活圆满结束,在此,特别感谢医…
-
家长学校工作总结
家庭是塑造孩子健康,人格的第一环境,为了让更多的家庭成为塑造孩子健康人格的环境,成为健康的理想的学习型家庭。一年来,我校家长学校工…
-
六监区上半年工作总结及下半年工作计划
上半年在监狱党委的正确领导下,监区全体警察众志成城,克服押犯规模最大、管理压力最重、生产任务最多的困难,锐意进取,顽强拼搏,较出色…